2. Basic Approaches to Solving the Problem of Residual Resistance
In order to understand the hydrodynamics of residual resistance, the basic conditions for solving this problem are formulated and the paradoxes that have arisen are considered.
The first condition—Engineering solutions are usually constructed when considering the first-order of the acting forces without taking into account their higher orders. For example, the solution of Michell constructed on the linearization of differential equation and boundary conditions gives the main part of the wave resistance and a better approximation to the experimental curves of the residual resistance than all higher order theories.
The second condition—Ship resistance is the result of the action of the hull of a moving ship on water, so it is necessary to look for sources of resistance components on the surface of the hull, rather than in a stream of waves and vortices outside it. The proof of this hypothesis is, for example, the Prandtl solution of the problem of frictional resistance. Michell also received his solution by integrating pressure over the surface of the hull.
The third condition—To identify the reasons for the discrepancy between the calculated curve of the wave resistance and the experimental one, it is necessary to find explanations for the paradoxes that arose in the process of solving this problem and, at the same time, remember the words of Leonardo da Vinci, that the experiment never deceives, our judgments deceive us.
The first paradox—In the calculations of water resistance of ships, the reversed motion of the vessel is usually considered, that is, the vessel is considered fixed, and the liquid is regarded as flowing to it at a constant velocity. This is true if the fluid is considered ideal, but in a real liquid, the Du Buat’s paradox must be taken into account.
The essence of Du Buat’s paradox is that the resistance of a body moving at a constant speed in a fluid at rest is greater than the resistance of the same, but motionless body, streamlined by the fluid at the same speed.
There are various explanations for this paradox, but in the case of vessel motion, the liquid is at rest, the body must overcome the inertial state of the viscous fluid at rest, which requires additional energy. When the fluid moves, the streamlines only slightly curve around the body, which requires little energy.
In any event, neglecting Du Buat’s paradox leads to the fact that in calculating water resistance the movement of ships under reversed motion does not take into account the formation of retaining waves associated with inertial properties of the fluid.
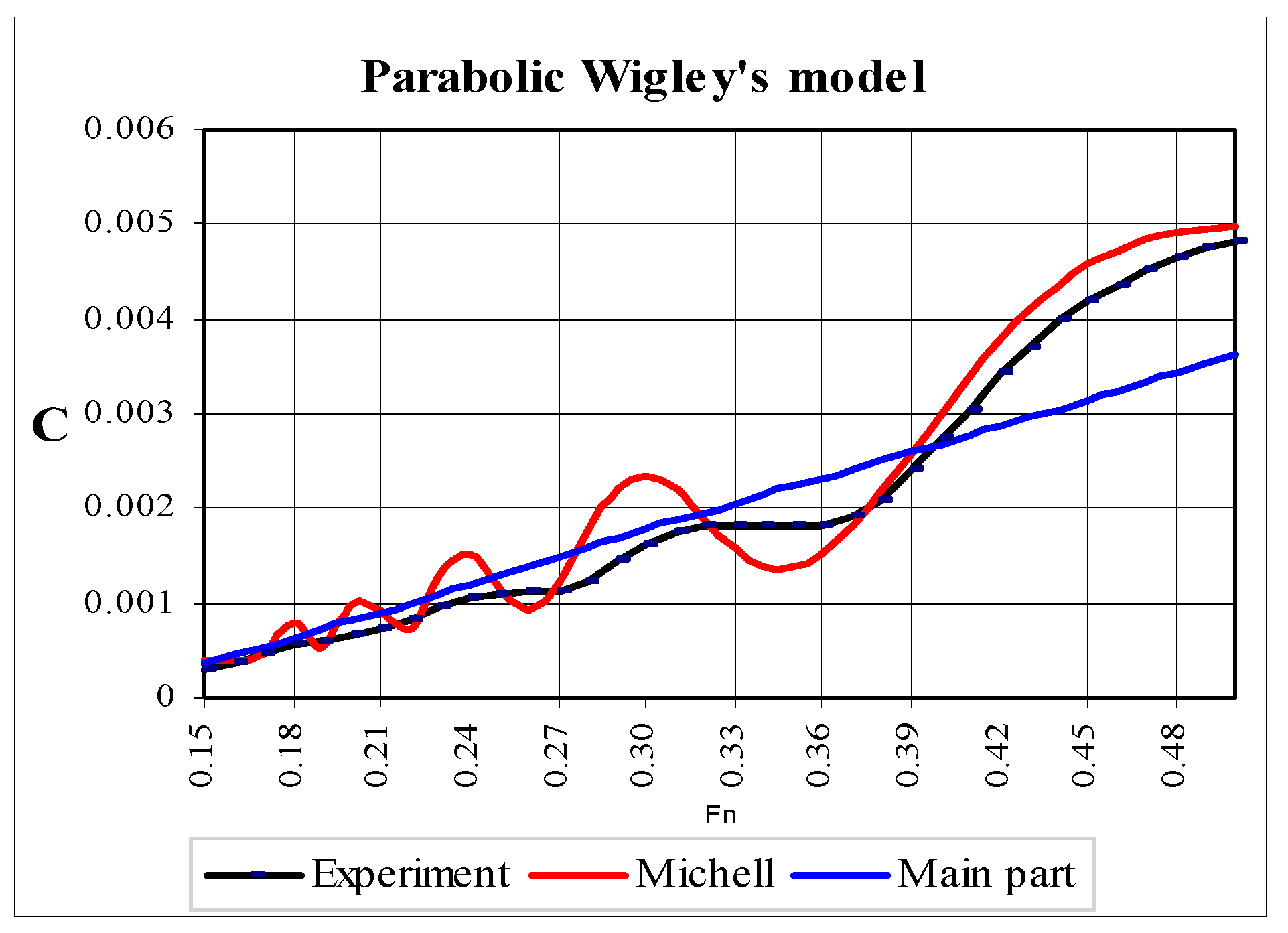
The second paradox—It is believed that the residual resistance is the sum of the wave and vortex resistance. Determining the wave resistance using Michell’s integral and comparing with the residual resistance from the experiment, we obtain the result for most of Weinblum’s and Wigley’s models, as shown in
Figure 1, i.e., the curve of the residual resistance passes below the wave resistance curve. For comparison, a new form of Michell’s integral is used [
5], described below in Equations (3)—(7).
This contradicts the physical meaning, because moving in an ideal fluid (as it is believed in Michell’s integral) is certainly easier than in a viscous fluid. This fact is a paradox.
The same comparison was made for different models to avoid accidents in such a mutual position of the calculated and experimental curves. The results are summarized in
Table 1 and
Table 2. Michell’s curves were obtained with a correction taking into account the subsurface boundary layer of the ship’s waves. The rightmost column of
Table 1 and
Table 2 show the relative position of Michell’s curve
Rw and the experimental curve of the residual resistance
Rres in the range 0.15 < Fr < 0.3.
Table 1 and
Table 2 show that, in addition to the entry angle
of the main waterline, the longitudinal fullness coefficient
affects the mutual position of the calculated and experimental curves. The models in
Table 1 are located in decreasing order of the entry angles
(the third column of tables). This is shown by the selection of those values
(
-block coefficient,
-midship area coefficient) that explain the violation of order in the mutual position of the curves (in the sixth column).
The third paradox—In the famous experiment of G. Weinbum, J. Kendrick and M. Todd [
3] with an elongated model, the calculated Michell’s curve coincides with the residual resistance curve (
Figure 2) with all the humps and hollows at all Froude numbers. The authors of this experiment checked Michell’s first assumption that the width of the ship is considered small compared to its length. They made the model with L/B = 36, 7. However, Michell made his decision with three assumptions. He believed that the height of the ship waves is small in comparison with their length, and that the liquid is not viscous. For such a coincidence of the Michell’s curve with the residual resistance curve, the second and third assumptions must be satisfied, which means that the liquid behaved as ideal in this experiment. Why?
Another experiment, described in the author’s works [
5,
9,
10] with a tandem of struts (
Figure 3), causing two consecutive Kelvin systems of waves, can be added to Weinblum’s (
Figure 2) experiment. It was assumed that the struts create, as sources, two Kelvin systems of waves. Although there is no ship hull with its boundary layer between the struts, the resistance curve of the tandem (
Figure 4) had the same characteristics as the residual resistance curves of the displacement ship models, although it was assumed that the interaction of the two wave systems should give humps and hollows on the tandem resistance curve, as in Michell’s curve in
Figure 1.
Then the second question arose: “Why does the fluid with the developed boundary layer in Weinblum’s [
3] experiment behave as ideal—and in the case of thin struts with an aviation profile—in the absence of a hull of the ship with a boundary layer between them, there is an obvious influence of viscosity (in an ideal fluid curves would have humps and hollows)?” Both experiments prove that the boundary layer of the ship hull does not affect the wave resistance. However, this fact led to the thought of the role of the ship bow of the moving body in creating residual resistance. The entrance angle of the main waterline of the elongated model is approximately 2°, while the struts have an almost straight bow entry. Then the hypothesis of the existence of “impulse pressure” in the bow was formulated.
The waves created by the struts can be reduced only by turbulent viscosity, and only impulse pressure on the bow’s perpendicular could create turbulence flow. Hence, the turbulence flow is connected with the entrance angle of the active waterline. In Weinblum’s model [
3], the angle of entry is so small that the impulse pressure is negligible, so that the effect of viscosity on the ship waves is small.
In order to accurately determine the hydrodynamics of the action of viscosity and its role in the residual resistance, it is necessary to understand what is happening at the stem of a moving vessel.
The accepted design scheme—Michell’s integral is the basis for calculating residual resistance for three reasons. First, this integral directly contains the derivatives of the waterlines of the theoretical drawing, reflecting in this way the exact shape of the ship hull instead of dimensions and parameters. Second, this integral accurately reflects the hydrodynamics of the ship’s wave system: the bow and stern Kelvin wave systems move away from the stem and the sternpost, and the derivatives of the waterline entering into Michell’s integral are also taken on the stem and the sternpost. Third, this integral is convenient for introducing corrections which take into account the effects of the subsurface shear layer and the shifting of the tops of ship waves by the retaining waves.
The new form of the Michell integral used in this work was obtained by integration over the length, which eliminated the errors of discretization of the ship hull surface length [
5]. Thus, numerical integration is applied only at the last stage.
When a new form of the Michell integral is used, it is convenient to introduce corrections that take into account the effect of viscosity. In the new form of the Michell integral the main non-oscillating part is separated from the part responsible for interference of the fore and aft wave systems. In addition, contributions to the resistance from the fore and aft parts are also separated. Thus, the Michell integral with two corrections has the form:
where
The equation of the hull surface for this calculation is presented in the form
where
where
where
Here
—is the angle of integration. The indices
and
refer to the bow and the indices
and
refer to the aft part of the hull.
Usually, all the derivatives entering into Formula (7) are taken in the Michell integral on the stem and at the sternpost at the points and , where indicated , etc.
To account for the shift in the Michell integral, the shift correction in the form of a factor
is introduced to the function
, which is the tangent of the entry angle
of the acting waterline (this is a function in Formula (7)).
The shift correction in (7) has the following form:
where
is Froude number,
is Froude number, from which the calculation begins. To account for the effect of the shear layer below the surface of ship waves, a correction
is introduced to the interference term of the Michell integral (1).
3. Retaining Waves and the Shift of the Bow Kelvin Wave System
The following information was known to us from Japanese works. E. Baba traced the path from the plane of the aft perpendicular, where he measured the loss of momentum, to the origin of the vortices at the place of breakdown of waves near the bow of ships [
10]. According to our second condition, the source of the vortices should be sought on the surface of the hull, and not somewhere in the current, as E. Baba does. In the work of H. Miyata et al. [
11] it is written: “It is intuitively understood that linear waves and nonlinear waves coexist around ships. Therefore, wave resistance of ships is supposed to be composed of two different wave systems. In other words, the flow field, where the Kelvin system begins, is covered by shockwaves on the free surface. Consequently, the interaction between the two wave systems will affect the resistance.” H. Miyata writes in all the following works on shock waves that the stern slope of shock waves has a turbulent nature and later H. Miyata and T. Inui write, “The displacement velocity by free surface is supposed to shift Kelvin pattern laterally”. This is shown in
Figure 5 and
Figure 6.
It should be noted that according to the known formula
from field theory, retaining waves and Kelvin waves cannot “coexist” in one space: Therefore, Miyata’s first statement is wrong, but the conclusion about the shift is true in these Japanese works. Notwithstanding, the fact of the shift of the bow Kelvin wave system by retaining bow waves is important because accounting for this shift, as will be shown later, leads to agreement the calculated resistance and the experimental results. Shift by retaining waves of the bow Kelvin wave system is clearly visible in photos of high-speed vessels in
Figure 7a–d.
Shift correction—
. It is easy to see that up to Fr = 0.4 there are the two Kelvin systems of waves. On the Froude number 0.4 only one transverse wave of the Kelvin system placed along the ship’s hull length and at higher Froude numbers the bow and stern systems of the waves are combined into one system, so there are no more humps and hollows on Michell’s curve as at small Froude numbers and the calculated Michell’s curve passes close to the experimental curve of residual resistance (
Figure 1).
Consequently, the problem is to find a way to calculate the residual resistance of the vessel in the range of Froude numbers from 0.15 to 0.40.
Since the boundary layer of the ship hull has no effect on ship waves, the residual resistance is determined only by the retaining and ship waves and their interaction. Their interaction consists in a shift of the Kelvin wave system top by the retaining waves. This shift occurs on the ship hull surface, and therefore it must be taken into account of the resistance.
The main role of the shift correction is that it takes into account the effect of turbulent retaining waves on the Kelvin bow system. In this way, the first assumption of the smallness of the ratio of the width of the vessel to its length and the third assumption of Michell that the fluid is considered ideal is partially compensated.
The coincidence of the calculated curves obtained with the correction of the shift with the experimental curves for dozens of models proves that the calculation of the residual resistance based on the Michell integral with the correction of the shift correctly describes its nature (
Figure 8). The interaction of the retaining and Kelvin waves can be taken into account as follows. The Michell integral (3) includes the first derivatives of the waterline on the fore and aft perpendiculars. Since the top of the bow wave system is shifted by the retaining waves to the stern direction, the derivative must be taken not at the fore perpendicular, but at the point in which this top is actually located. Despite the fact that Japanese scientists have noticed a shift of the Kelvin system, they have not taken it into account.
The meaning of the correction is visible in
Figure 9. The following notation is accepted here:
angle of entry of main waterline,
—angle of the tangent line to the main waterline in the top of the Kelvin bow system. It is clear that for convex waterlines (
Figure 9a), the shift leads to a decrease in the calculated entry angle (
) and for concave (
Figure 9b)—to an increase. At very small entry angles, usually the waterline near the stem is concave, and the calculated Michell’s curve usually passes below the residual resistance curve. If we take the angle
instead of the angle
on the stem, the calculated Michell’s curve will drop to the position of the residual resistance curve.
This fact explains the existence of the second paradox. The calculated Michell’s curve passes above the residual resistance curve because the actual angle of the tangent line to the main waterline at the position of the top of the bow Kelvin system is less than on the stem.
The relationship between the angles and is much more complicated with a bend on the active waterline. If the waterline has any bend, the calculated Michell’s curve may pass above the experimental curve of the residual resistance, despite the small entry angle of the main waterline.
In order to take into account this shift, a correction is used in the form It is impossible to find the general formula for the correction of the shift, because it includes two coefficients and , each of which depends on several parameters of the ship hull shape.
T. Inui said the same: “Owing to the high complexity of the bow-wave pattern, it is not possible yet to determine the amount of phase shift experimentally with the complicated hull” [
12].
With sufficient accuracy for practice, it is possible to determine the correction of the shift only in the case when the waterline of the bow extremity has no bend; either straight or slightly convex.
Visual observation shows that the shape of the retaining waves depends on the speed of the vessel or its model. The sequence of stop-frames for the development of retaining waves with increasing velocity is shown in
Figure 8. With increasing speed, the retaining waves are pressed increasingly to the surface of the body, which leads to a shift of the top of the bow Kelvin system of waves towards midsection.
For the study and calculations, the analytical models of G. Weinblum and W. Wigley are used, the data of which are given in
Table 1,
Table 2,
Table 3,
Table 4 and
Table 5. The models taken for the calculation had different shapes of the main waterlines, as shown in
Figure 10 and
Figure 11. The choice of these models is justified by the fact that we have the G. Weinblum and W. Wigley experiments of fairly accurate. The calculation results are given in
Section 4 (Table 7).
It is clear from this study that the coefficient
in (8) takes into account the change in the angle of entry
at the main waterline at the beginning of the movement. The coefficient
takes into account the dependence of the shift of the top of the bow Kelvin system on the speed of the vessel or model. Even such a simple study, which is shown in
Table 3,
Table 4 and
Table 5, shows that the coefficients
and
are very complex depending on the hull.
It must be taken into account that shift correction, how it is used in this work, takes into account not only the shift of the Kelvin wave system, but also a decrease in pressure in the stern of the ship’s hull.
Comment. In order to determine the correction empirically, it is necessary to divide the hull shapes of different ships into types and experimentally obtain for each type the coefficients values and depending on hull parameters.
When there are waves on the flow of fluid, a velocity gradient naturally is formed below the free surface. A typical experimentally picture of the velocity distribution under the free surface of a wave near the moving ship model is shown in
Figure 12. The gradient of velocity is called the “shear layer.” The destruction of waves is associated with the existence of this shear layer. Studies of the shear layer began intensively after E. Baba [
10] took note of the flow of vortices creating a loss of momentum in the plane of the aft perpendicular. In 1970, S. Taneda [
13] E. Eckert and S. Sharma [
14] were engaged in experimental study of vortices around the bow of the vessel. The article by K. Taniguchi et al. [
15] on the investigation of the wake was published a year later. K. Takekuma published the article [
16] on nonlinear waves around the ship bow next year and a year later an article by E. Eckert and S. Sharma [
14] on the bulbous form of the bow, which appeared to suppress the bow wave creating the vortex was published.
In the late eighties and early nineties, the results of experimental studies of the shear layer under a free wave surface were published by V. Melvil with V. Rapp [
17], J. Duncan et al. [
18], J. Lin and D. Rokwell [
19]. It is necessary to note the work done in the basin of David Taylor (USA) R. Dong, J. Katz and H. Huang [
20]. The studies were carried out using a PIV speedometer with the image of the fluid particles in the flow around the ship model, with attention focused on the flow inside the liquid layer, upward from which the bow waves separate from the surface of the model. In addition, the origin and structure of the bow wave and the stream downstream from the crest of the wave were studied.
In addition to the experimental works and theories were developed methods for calculating resistances associated with a shear layer under a free wave surface around a moving vessel. Naturally, they give good reviews. Here we should mention the survey works of D. H. Peregrine, L. A. Svendsen [
21] in 1978 and M. Banner with D. Peregrin [
22] in 1993. Good analytical reviews were performed by L. Rahedzia [
23], [
24] in 1986 and then in 1995.
Theoretical approaches to turbulence were developed by G. Dagan and M. Tulin [
25], J. Vanden-Brock and E. Tuck [
26], H. Miyata and T. Inui [
27], E. Baba and K. Takekuma [
28], G. Vanden-Brock, M. Shvarts and E. Tak [
29], K. Eggers [
30], T. Inui [
11], K. Mori [
31], A. Shahshahan [
32], J. Hoyt and R. Sellyn [
33], M. Longe-Higgins and E. Kokelet [
34], R. Cointe and M. Tulin [
35], E. Pogozelsky, J. Katz, T. Huang [
36].
As a result of the studies performed, it was concluded that:
- (1)
The shear layer on the free surface and the vortices in it are closely related to the destruction of waves around the bow;
- (2)
A draft in the bow, an extended underwater bulb, the angle of the bow entrance and the contours of the waterline greatly affect the shear under the free surface and the vortices in it;
- (3)
With the exception of a thin layer below the free surface, the velocity components obtained by measurements coincided with the results of numerical calculations based on the assumption of a double model;
- (4)
The velocity components change sharply in this thin layer in the vertical direction (
Figure 12);
- (5)
The shear layer of the ship’s wave system affects only the interaction of the bow and stern of the Kelvin wave systems, because this shear layer is outside the ship’s hull and cannot act on the part of the resistance, determined by the main part of Michell’s integral.
Correction. In order to obtain a coefficient that takes into account the viscosity of the subsurface shear layer, Sretensky’s formula for calculating the wave height in the Cauchy-Poisson problem for a viscous liquid is used [
4]:
If we assume that the time
is equal to the time for which the bow waves reach the point of wave formation in the stern, then, by substituting
into Sretensky’s formula, this correction is obtained in the form:
Since the coefficient of molecular viscosity
practically has no effect on the height of the water wave, it is necessary to replace it with the coefficient of turbulent viscosity
. Then it raises the question of the possibility of a simple replacement of the coefficient of molecular viscosity
by the coefficient of turbulent viscosity
. Since such a substitution was made in the diffusion problem by N.E. Kochin, we considered it possible to make the same substitution in this case. The next problem is the exact determination of the coefficient
. In our case, this coefficient has the form
here
is half the coefficient of turbulent viscosity. Unfortunately, this coefficient
depends on the dimensional value
L. Since Michell’s integral in our case gives the coefficient of wave resistance and not the resistance itself, one can always take into account the length would have a value 4.5–5.0 m and
should be in the range 0.05 ÷ 0.08. This is evident from
Table 5.
Regarding the correction , taking into account the subsurface boundary layer of Kelvin waves, the following should be noted. Judging by the formation of a necklace of vortices, this boundary layer has a turbulent nature and it would have to be calculated using RANS. But to use RANS in this case, special studies are still needed, perhaps more complicated than to obtain an correction, therefore, in this case, approximate values are accepted, especially because this correction varies in a small range.
Among Weinblum’s models, there are 4 models Wb1110 Wb1100, Wb1136, Wb1097 having the same dimensions and the entrance angle, but the experimental residual resistance curves and main part of Michell integral turned out as different (
Table 6).
Of course, it is natural to analyze the influence of the shape parameters on the resistance using these models. The graph (
Figure 13) clearly shows the relationship between the coefficient of longitudinal fullness
and the relative position of the experimental curves of the residual resistance.
The Wb1110 has the smallest coefficient and the resistance curve passes below the others. The Wb1100 model has the largest coefficient and the residual resistance curve passes above the others. It turns out that to reduce the resistance, it is necessary to reduce the coefficient of longitudinal fullness as much as possible, which in general does no contradict common sense. To reduce this coefficient, it is possible by increasing the fullness of the coefficient ; shifting the displacement to the midsection.
The same conclusion was obtained by decreasing the wave resistance using the Michell integral [
5].
In order to obtain the general calculated formula special empirical and experimental studies are required. It is necessary to find the dependence of turbulence, i.e., coefficients and on the shape parameters of the hull. In this study, they are assumed to be constant, but turbulence cannot be independent on the speed of the vessel. Judging by the numerous calculations for different models, this dependence is very small.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















































