Numerical Study over the Effects of a Designed Submerged Breakwater on the Coastal Sediment Transport in the Pescara Harbour (Italy)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Motion Equations
2.1. Hydrodynamic Model
2.2. Morphodynamic Model
- (1)
- The instantaneous hydrodynamic quantities are computed by the hydrodynamic model presented in Section 2.1. The simulation time has a duration of about times the mean wave period.
- (2)
- The instantaneous hydrodynamic quantities obtained by Step 1 are averaged over the period (which is mean wave periods [27]).
- (3)
- The wave-averaged hydrodynamic quantities obtained by Step 2 are used as input for the solid particles’ concentration in Equation (18). Equation (18) is numerically integrated and gives the suspended sediment concentration .
- (4)
- The concentration values (that are depth and wave averaged) are used to compute (by WENO reconstructions) and the values wave-averaged actual concentration .
- (5)
- The wave-averaged reference concentration (computed by Step 1), the wave-averaged actual concentration (computed by Step 4) and the bed load transport are used as input for the equation of the bottom modification (Equation (22)). We define the time step of the integration of the bed change equation as “morphological time step”. By numerically integrating Equation (22), it is possible to update the bathymetry for the successive morphological time step. The morphological time step is greater than the simulation time interval of the hydrodynamic model. The morphological time step is evaluated, by means of a trial-and-error procedure, by a posteriori verifying the numerical results.
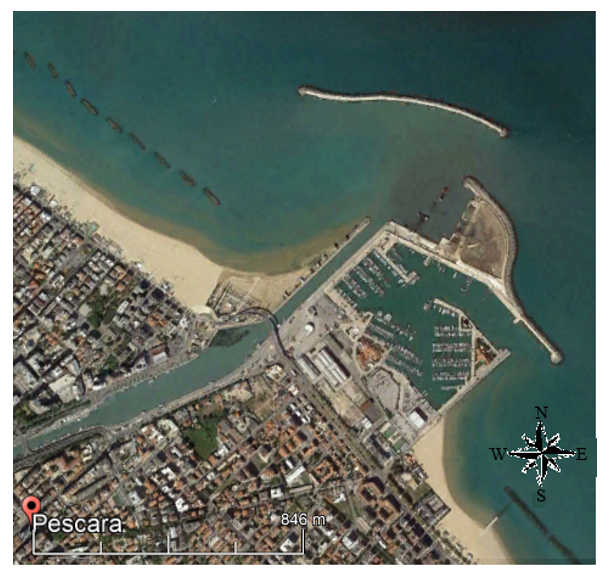
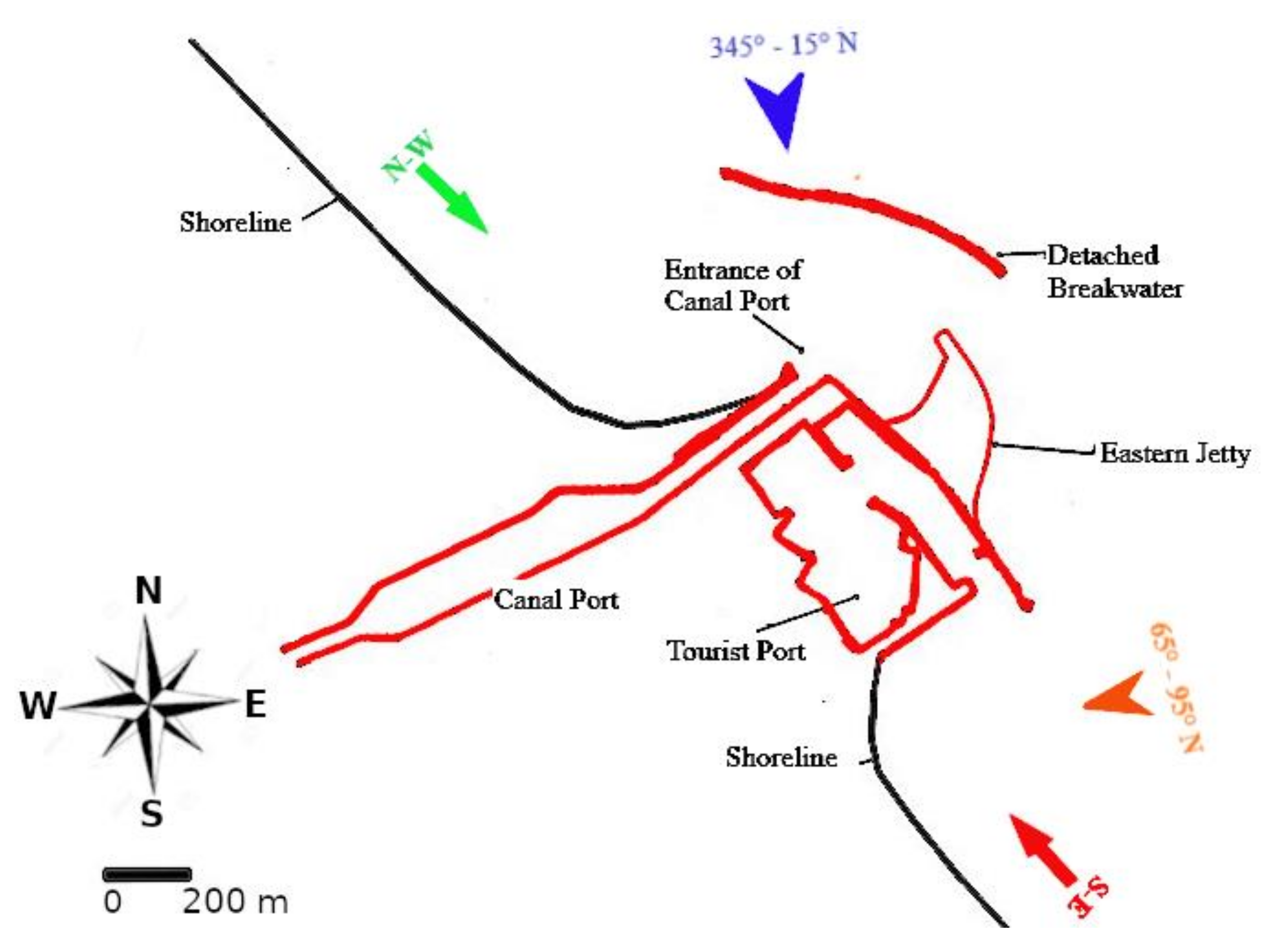
3. Pescara Harbour Case Study
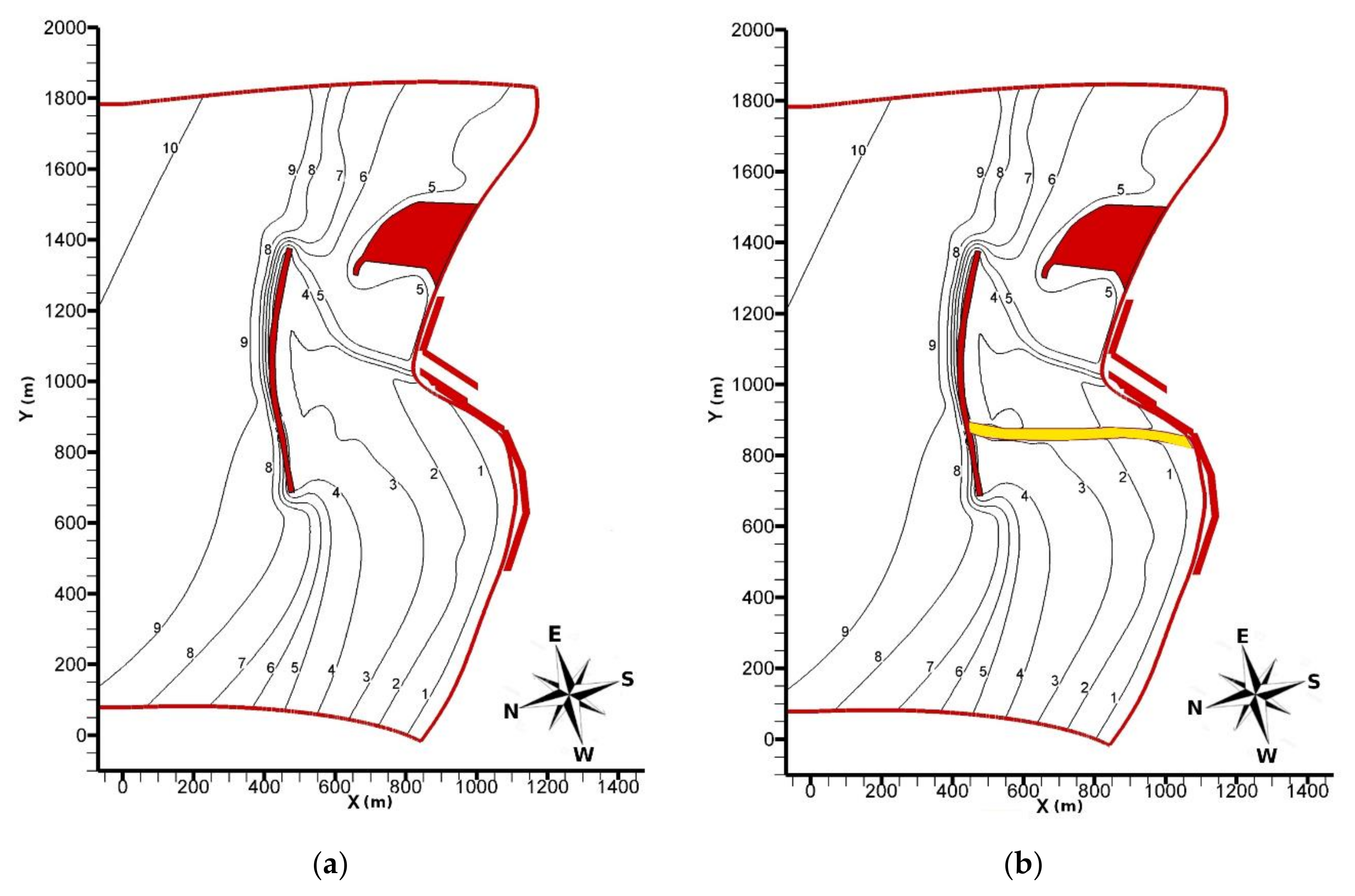
3.1. Configuration 1
3.2. Configuration 2
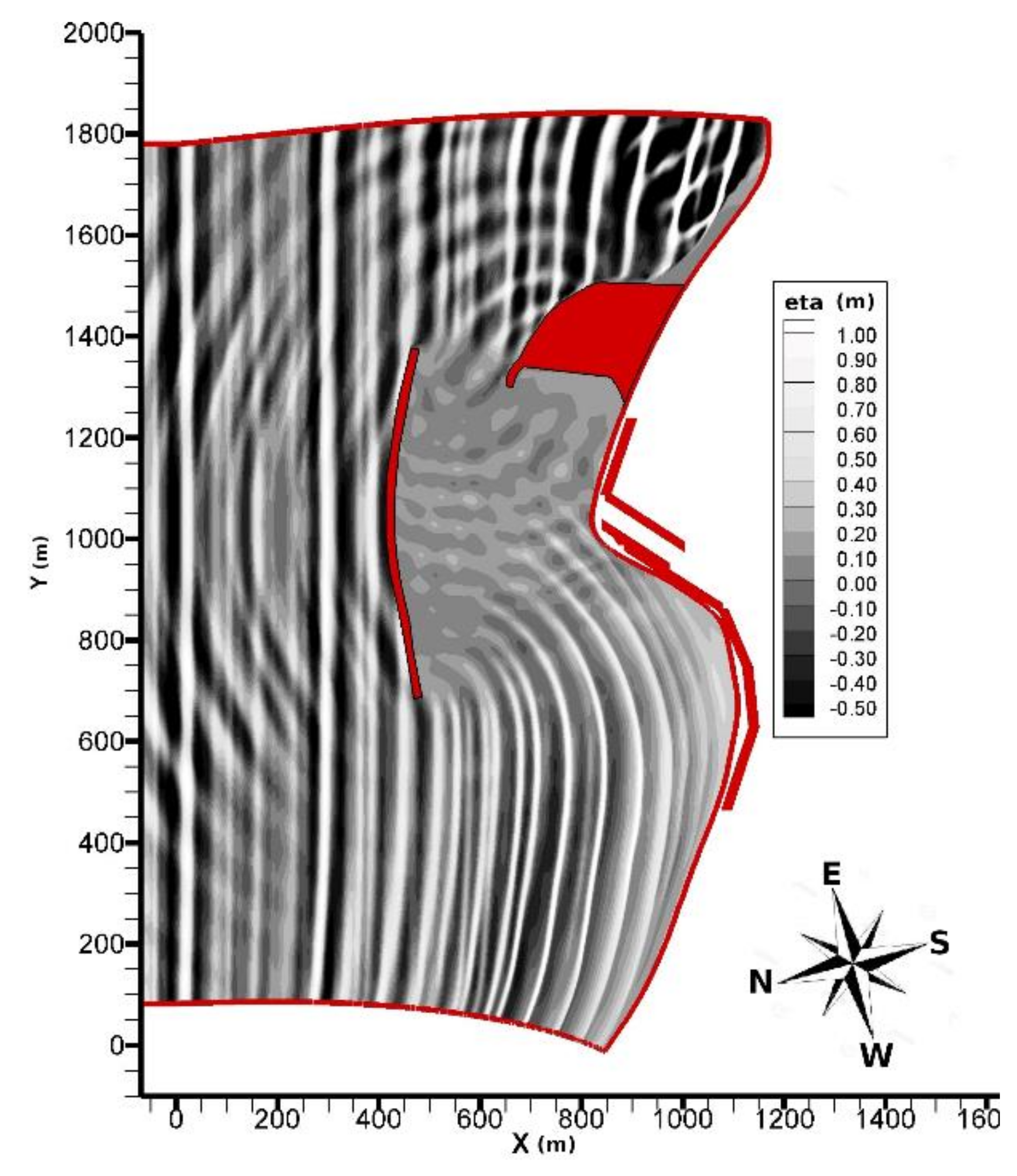
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D
Appendix E
Appendix F
Appendix G
References
- Mortlock, R.T.; Goodwin, I.D.; McAneney, J.K.; Roche, K. The June 2016 Australian East coast low: Importance of wave direction for coastal erosion assessment. Water 2017, 9, 121. [Google Scholar] [CrossRef]
- Nguyen, C.Q.; Goodwin, I.D.; Mortlock, T.R.; Gallop, S.L. The influence of wind on hydrodynamic processes in Robbins Passage, Tasmania, Australia. J. Coast. Res. 2018, 85, 141–145. [Google Scholar] [CrossRef]
- Cannata, G.; Gallerano, F.; Palleschi, F.; Petrelli, C.; Barsi, L. Three-dimensional numerical simulation of the velocity fields induced by submerged breakwaters. Int. J. Mech. 2019, 13, 1–14. [Google Scholar]
- Cannata, G.; Petrelli, C.; Barsi, L.; Gallerano, F. Numerical integration of the contravariant integral form of the Navier-Stokes equations in time-dependent curvilinear coordinate systems for three-dimensional free surface flows. Continuum Mech. Therm. 2019, 31, 491–519. [Google Scholar] [CrossRef] [Green Version]
- Losada, I.J.; Lara, J.L.; del Jesus, M. Modeling the interaction of water waves with porous coastal structures. J. Waterw. Port. Coast. Ocean. Eng. 2016, 142, 1–18. [Google Scholar] [CrossRef]
- Losada, I.J.; Lara, J.L. Chapter 32: Three-dimensional modeling of wave interaction with coastal structures using Navier-Stokes Equations. In Handbook of Coastal Ocean Engineering; Young, C.K., Ed.; California State University: Los Angeles, CA, USA, 2018; pp. 919–943. [Google Scholar]
- Cannata, G.; Lasaponara, F.; Gallerano, F. Non-linear Shallow Water Equations numerical integration on curvilinear boundary-conforming grids. WSEAS Trans. Fluid Mech. 2015, 10, 13–55. [Google Scholar]
- Postacchini, M.; Ludeno, G. Combining Numerical Simulations and Normalized Scalar Product Strategy: A New Tool for Predicting Beach Inundation. J. Mar. Sci. Eng. 2019, 7, 325. [Google Scholar] [CrossRef] [Green Version]
- Ikha, M.; Atras, M.F.; Sembiring, L.; Nugroho, M.A.; Roi Solomon, B.L.; Roque, M.P. Wave Transmission by Rectangular Submerged Breakwaters. J. Mar. Sci. Eng. 2020, 8, 56–74. [Google Scholar]
- Kian, R.; Velioglu, D.; Yalciner, A.C.; Zaytsev, A. Effects of Harbor Shape on the Induced Sedimentation; L-Type Basin. J. Mar. Sci. Eng. 2016, 4, 55. [Google Scholar] [CrossRef]
- Lo Re, C.; Manno, G.; Ciraolo, G. Tsunami propagation and flooding in Sicilian Coastal Areas by means of a weakly dispersive Boussinesq model. Water 2020, 12, 1448. [Google Scholar] [CrossRef]
- Liu, W.; Ning, Y.; Zhang, Y.; Zhang, J. Shock-capturing Boussinesq modelling of broken wave characteristics near a vertical seawall. Water 2018, 10, 1876. [Google Scholar] [CrossRef] [Green Version]
- Gallerano, F.; Cannata, G.; Villani, M. An integral contravariant formulation of the fully non-linear Boussinesq equations. Coast. Eng. 2014, 83, 119–136. [Google Scholar] [CrossRef] [Green Version]
- Petti, M.; Bosa, S.; Pascolo, S. Lagoon sediment dynamics: A coupled model to study a medium-term silting of tidal channels. Water 2018, 10, 569. [Google Scholar] [CrossRef] [Green Version]
- Shi, F.; Kirby, J.T.; Harris, J.C.; Geiman, J.D.; Grilli, S.T. A high-order adaptive time stepping TVD solver for Boussinesq modelling of breaking waves and coastal inundation. Ocean. Model. 2012, 43–44, 35–51. [Google Scholar] [CrossRef]
- Gallerano, F.; Cannata, G.; Scarpone, S. Bottom changes in coastal areas with complex shorelines. Eng. Appl. Comput. Fluid Mech. 2017, 11, 396–416. [Google Scholar] [CrossRef]
- Tonelli, M.; Petti, M. Finite volume scheme for the solution of 2D extended Boussinesq equations in the surf zone. Ocean. Eng. 2010, 37, 567–582. [Google Scholar] [CrossRef]
- Tonelli, G.; Petti, M. Shock-capturing Boussinesq model for irregular wave propagation. Coast. Eng. 2012, 61, 8–19. [Google Scholar] [CrossRef]
- Lynett, P.J. Nearshore wave modelling with high-order Boussinesq-type equations. J. Waterw. Port. Coast. Ocean. Eng. 2006, 132, 348–357. [Google Scholar] [CrossRef] [Green Version]
- Wei, G.; Kirby, J.T.; Grilli, S.T.; Subramanya, R. A fully non-linear Boussinesq model for surface waves. Part 1: Highly nonlinear unsteady waves. J. Fluid Mech. 1995, 294, 71–92. [Google Scholar] [CrossRef]
- Chen, Q.; Kirby, J.T.; Dalrympe, R.A.; Shi, F.; Thornton, E.B. Boussinesq modeling of longshore currents. J. Geophys. Res. 2003, 108, 26–28. [Google Scholar] [CrossRef]
- Chen, Q. Fully non-linear Boussinesq-type equations for waves and currents over porous beds. J. Fluid Mech. 2006, 132, 220–230. [Google Scholar]
- Drønen, N.; Deigaard, R. Quasi-three-dimensional modelling of the morphology of longshore bars. Coast. Eng. 2007, 54, 197–215. [Google Scholar] [CrossRef]
- Kim, N.H.; An, S.H. Numerical computation of the nearshore current considering wave-current interactions a Gangjeong coastal area, Jeju Island, Korea. Eng. Appl. Comp. Fluid Mech. 2011, 5, 430–444. [Google Scholar] [CrossRef] [Green Version]
- Thompson, J.; Warsi, Z.U.A.; Mastin, C.W. Numerical Grid Generation; Elsevier North-Holland: New York, NY, USA, 1985. [Google Scholar]
- Deigaard, R.; Fredsøe, J.; Hedegaard, I.B. Suspended sediment tin the surf zone. J. Waterw. Port. Coast. Ocean. Eng. 1986, 112, 115–128. [Google Scholar] [CrossRef]
- Rakha, K.A.; Deigaard, R.; Brøker, I. A phase-resolving cross shore sediment transport model for beach profile evolution. Coast. Eng. 1997, 31, 231–261. [Google Scholar] [CrossRef]
- Italian Ministry of the Environment and Protection of Land and Sea “Studio Meteomarino—Piano Regolatore Portuale del Porto di Pescara”, 2008, 14. Available online: www.va.minambiente.it (accessed on 1 December 2008).
- Italian Ministry of the Environment and Protection of Land and Sea “Studio Morfologico—Piano Regolatore Portuale del Porto di Pescara”, 2008, 22–24. Available online: www.va.minambiente.it (accessed on 1 December 2008).






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gallerano, F.; Palleschi, F.; Iele, B. Numerical Study over the Effects of a Designed Submerged Breakwater on the Coastal Sediment Transport in the Pescara Harbour (Italy). J. Mar. Sci. Eng. 2020, 8, 487. https://doi.org/10.3390/jmse8070487
Gallerano F, Palleschi F, Iele B. Numerical Study over the Effects of a Designed Submerged Breakwater on the Coastal Sediment Transport in the Pescara Harbour (Italy). Journal of Marine Science and Engineering. 2020; 8(7):487. https://doi.org/10.3390/jmse8070487
Chicago/Turabian StyleGallerano, Francesco, Federica Palleschi, and Benedetta Iele. 2020. "Numerical Study over the Effects of a Designed Submerged Breakwater on the Coastal Sediment Transport in the Pescara Harbour (Italy)" Journal of Marine Science and Engineering 8, no. 7: 487. https://doi.org/10.3390/jmse8070487