A New Design Criterion to Improve the Intact Stability of Galician Small Fishing Vessels





Abstract
:1. Introduction
2. Materials and Methods
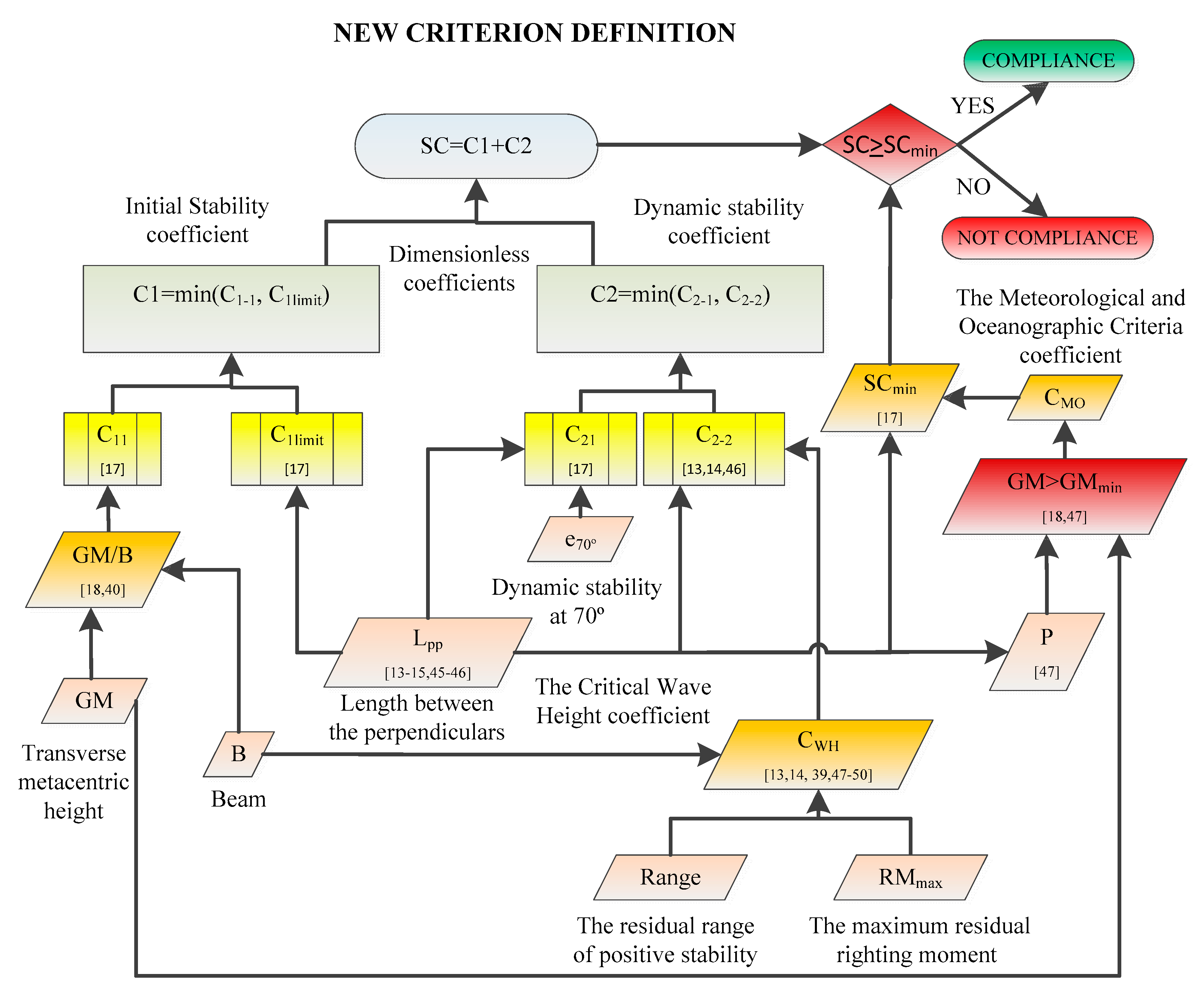
2.1. Criterion Definition
- It is advisable to establish a transverse metacentric height limit (GMlimit) for each vessel in relation to its length between the perpendiculars (Lpp) and its beam (B), but never to establish a fixed minimum value for the entire fleet.
- For such fishing vessels, the GM/B value is a good indicator of the acceleration they experience during navigation and fishing. According to the minimum initial stability criterion employed by O’Dogherty [18], which is based on the equations previously defined by de Ramón [44] from a curve fitting of real data from more than 40 fishing vessels under different weather conditions, the average GM/B value can be defined by Equations (1) and (2):
- The parameters of the GM values and dynamic stability of up to 70° (e70°) were used, or, when not available, the progressive angle of flooding if it was smaller [18].
- Earlier studies [13,14,15,45,46] have highlighted that the safety level provided by the criterion should depend on the vessel size and the sea conditions where it operates. This establishes that vulnerability to stress depends to a large extent on the residual stability range and to a lesser degree on the maximum righting moment.
- Heeling effects have been considered for vessels less than or equal to 24 m in length.
- As a prior step to applying the new Meteorological and Oceanographic Coefficient (CMO), the minimum GM value must be calculated as a function of the wind pressure by using Equations (3) and (4) [18]; it is to be employed as a control parameter in accordance with the recommendations of the U.S. Coast Guard in their weather criteria [47]. At the same time, the wind pressure is defined as a function of the length between perpendiculars and, in particular, for fishing vessels, Equation (4) must be employed [47]. Once the GM is greater than its minimum value, a detailed study can be made to establish a valid CMO coefficient for the fishing ground where each fishing vessel exercises its activity.
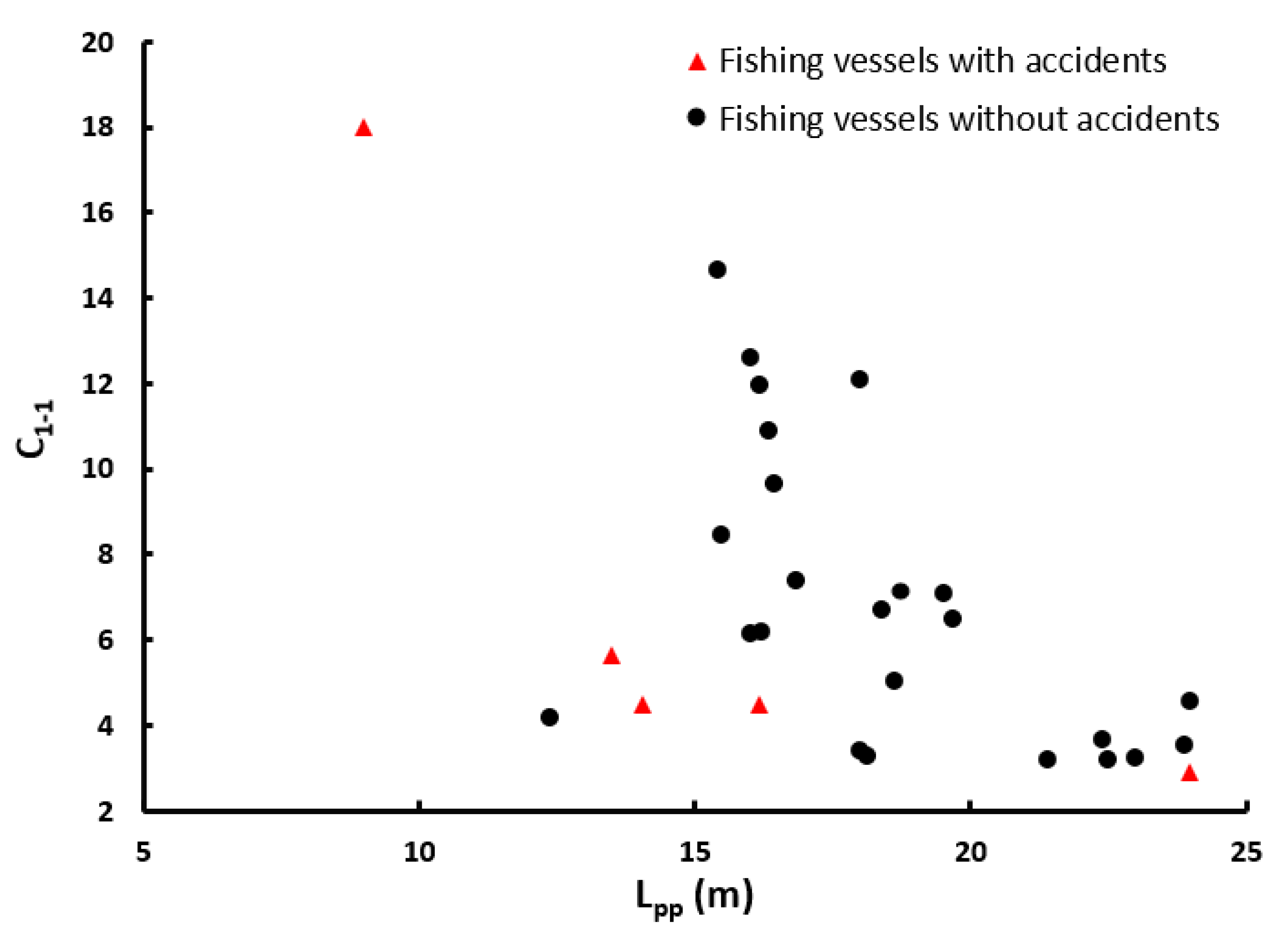
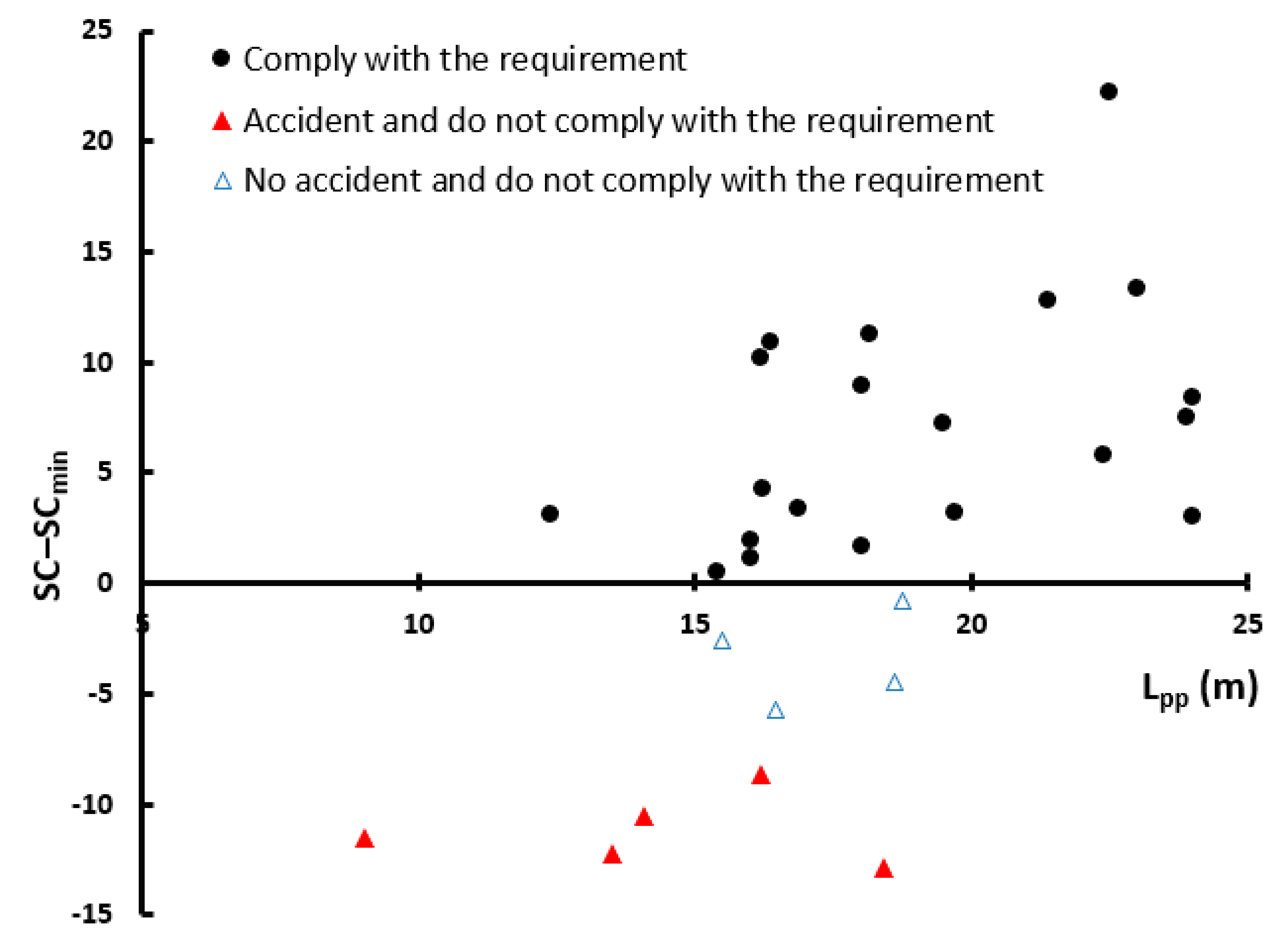
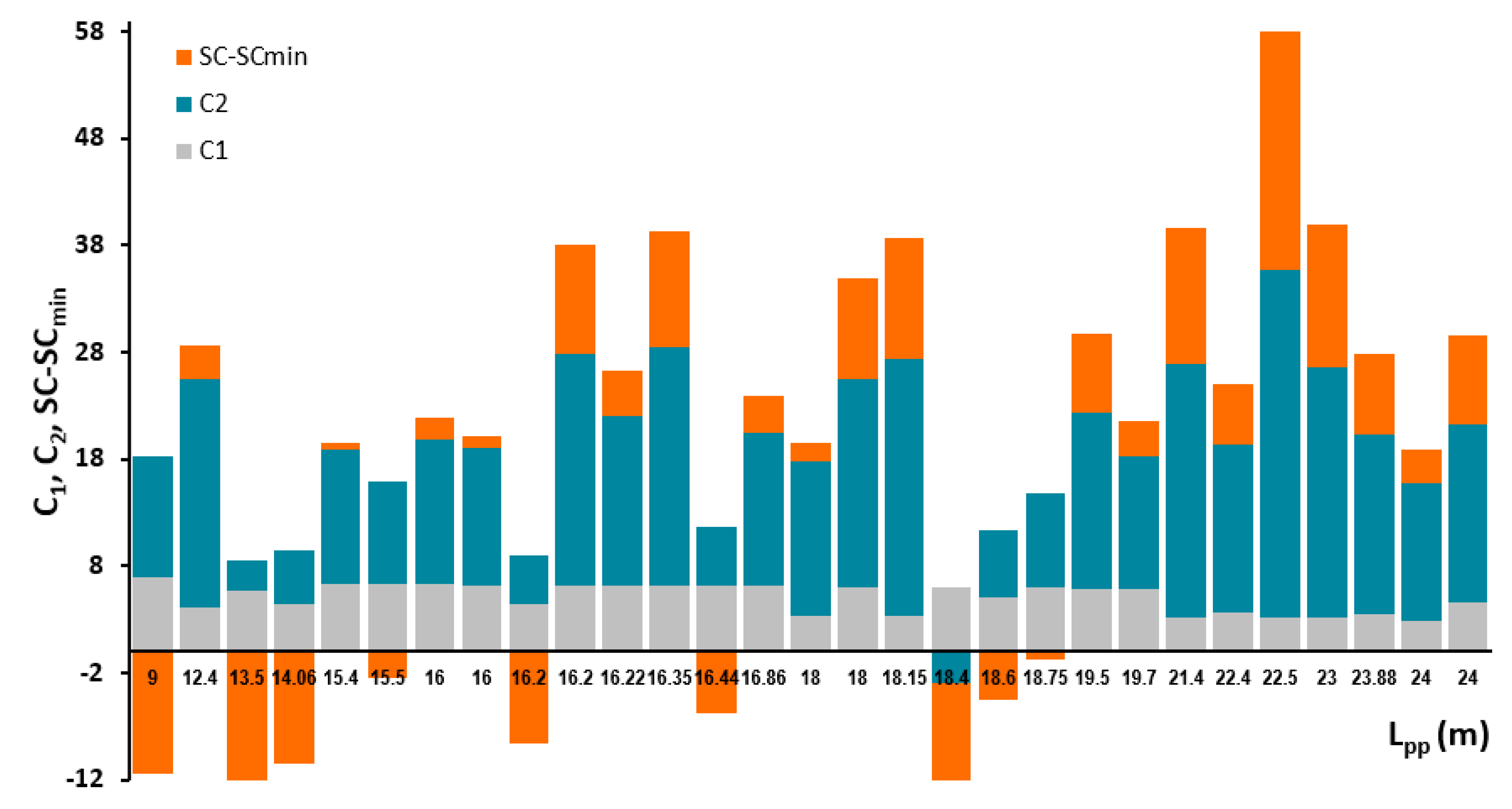
2.2. Criterion Validation
3. Results and Discussion
4. Conclusions
- A specific intact stability criterion for Galician fishing grounds has been developed for fishing vessels ≤ 24 m in length. In calculating their metacentric height values, the dynamic stability up to 70°, critical wave height, and meteorological and oceanographic conditions of the fishing grounds where the fishing operations shall be carried out and the seas that they cross to reach those grounds have all been considered.
- Our new calculation procedure confirms the original idea of compensating for the small lack of initial stability with greater dynamic stability at greater angles or vice versa.
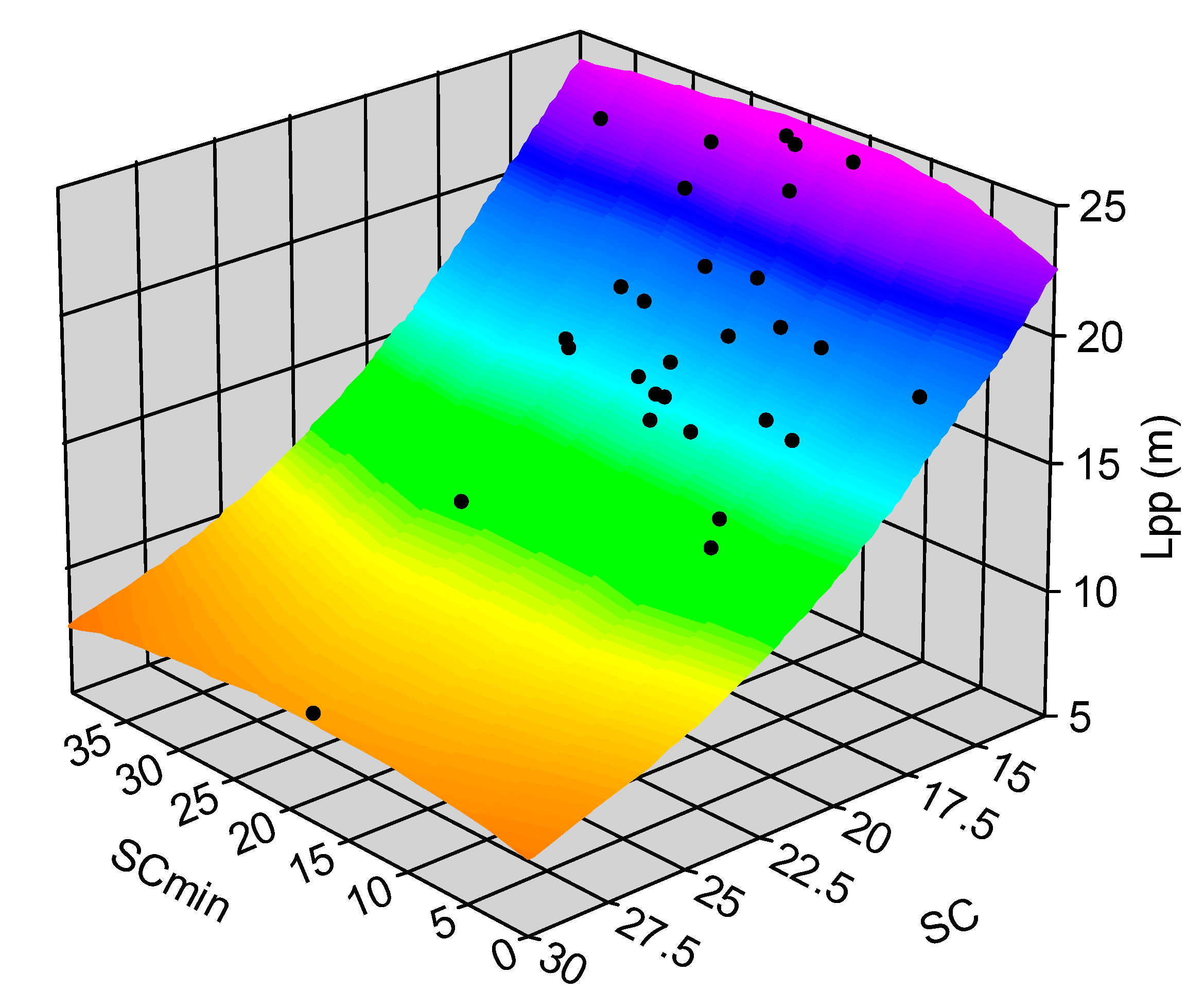
- A new model that relates the stability criterion coefficient to the length between the perpendiculars was adapted for Galician fishing grounds and then applied to define a particular minimum meteorological coefficient for an existing vessel or to define the fishing grounds within which such a vessel can operate.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Av | Projected lateral area exposed to the wind |
| B | Beam (m) |
| C1 | Initial stability coefficient |
| C1–1 | New model coefficient |
| C1limit | New model coefficient |
| C2 | Dynamic stability coefficient |
| C2–1 | New model coefficient |
| C2–2 | New model coefficient |
| CMO | The meteorological and oceanographic coefficient |
| CWH | Critical wave height (m) |
| e70° | Dynamic stability at 70 degrees (rad*m) |
| GM | Transverse metacentric height (m) |
| Lpp | Length between the perpendiculars (m) |
| p | Wind pressure (ton/m2) |
| RMmax | Maximum residual righting moment (ton meters) |
| SC | New stability criterion coefficient |
| θ | Heel angle (°) |
| z | Vertical distance of the center of area to the middle of the draft |
References
- IMO. International Code on Intact Stability, 2008—2009; IMO: London, UK, 2009; ISBN 978-92-801-1506-2. [Google Scholar]
- IMO. SDC 1/5/3, 2013, Development of Second Generation Intact Stability Criteria. Rpt. of the Correspondence Group on Intact Stability; Submitted by Japan; IMO: London, UK, 2013. [Google Scholar]
- IMO. MSC.1/Circ.1281. Explanatory Notes to the International Code on Intact Stability; IMO: London, UK, 2008. [Google Scholar]
- IMO. Development of Second Generation Intact Stability Criteria. Information Collected by the Intersessional Correspondence Group on Intact Stability (No. SLF 52/INF.2), Stability, Load Lines and Fishing Vessels Sub-committee; International Maritime Organization: London, UK, 2009. [Google Scholar]
- Míguez, M.; Díaz, V.; Pérez, L.; Pena, D.; Junco, F. Investigation of the applicability of the IMO second generation intact stability criteria to fishing vessels, In Proceedings of the 12th International Conference on the Stability of Ships and Ocean Vehicles, Glasgow, Scotland, 14–19 June 2015; pp. 1–11. [Google Scholar]
- Mata-Álvarez-Santullano, F.; Souto-Iglesias, A. Stability, safety and operability of small fishing vessels. Ocean Eng. 2014, 79, 81–91. [Google Scholar] [CrossRef]
- Míguez, M.; Caamaño, P.; Tedín, R.; Díaz, V.; Martínez, A.; López, F. Fishing vessel stability assessment system. Ocean Eng. 2012, 41, 67–78. [Google Scholar] [CrossRef]
- IMO. SLF54/INF.12-Annex 3. On the Consideration of Lateral Accelerations in Ship Design Rules; Submitted by Germany, SLF54/INF.12 submitted by Japan; IMO: London, UK, 2011. [Google Scholar]
- Umeda, N.; Francescutto, A. Current state of the second generation intact stability criteria-achievements and remaining issues. In Proceedings of the 15th International Ship Stability Workshop, Stockholm, Sweden, 13–15 June 2016; pp. 1–8. [Google Scholar]
- Schrøter, C.; Lützen, M.; Erichsen, H.; Jensen, J.J.; Kristensen, H.O.; Lauridsen, P.H.; Tunccan, O.; Baltsersen, J.P. Sample applications of the second generation intact stability criteria—Robustness and consistency analysis. In Proceedings of the 16th International Ship Stability Workshop, Belgrade, Serbia, 5–7 June 2017; pp. 1–6. [Google Scholar]
- Andrei, C. A proposed new generation of intact stability criteria for assessment of ship stability in longitudinal waves. IOP Conf. Ser. Mater. Sci. Eng. 2017, 227. [Google Scholar] [CrossRef] [Green Version]
- CIAIM. Annual report. Permanent Commission for the Investigation of Maritime Accidents and Incidents. Ministry of development. 2013. Available online: http://www.fomento.gob.es/MFOM/LANG_CASTELLANO/ORGANOS_COLEGIADOS/CIAIM (accessed on 15 December 2019).
- Wolfson Unit. Research Project 530, Simplified Presentation of Fishing Vessels Stability Information; Phase 1, Final Report; University of Southampton: Southampton, UK, 2004. [Google Scholar]
- Wolfson Unit. Research Project 560, Simplified presentation of Fishing Vessels Stability Information for Vessels 12 m Registered Length and Over; Phase 2; University of Southampton: Southampton, UK, 2006. [Google Scholar]
- Deakin, B. Development of simplified stability and loading information for fishermen. In Proceedings of the RINA Conference on Fishing Vessels, Fishing Technology & Fisheries. RINA, Newcastle, UK, 13–14 April 2005. [Google Scholar]
- Rahola, J. The Judging of the Stability of Ships and the Determination of the Minimum Amount of Stability Especially Considering the Vessels Navigating Finnish Waters. Ph.D. Thesis, Aalto University, Helsinki, Finland, 1939. Available online: https://aaltodoc.aalto.fi/handle/123456789/15149 (accessed on 1 November 2019).
- O’Dogherty, P. Informe Pericial Sobre las Causas del Hundimiento del Moto-Pesquero Cruz II; CIAIM, Spanish Ministry of Development: Madrid, Spain, 1969.
- O’Dogherty, P. Seguridad del Buque Pesquero, Estabilidad y Comportamiento en la mar (In Spanish). Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 2010. [Google Scholar]
- The Torremolinos International Convention for the Safety of Fishing Vessels. Available online: http://www.imo.org/en/About/conventions/listofconventions/pages/the-torremolinos-international-convention-for-the-safety-of-fishing-vessels.aspx. 2012 (accessed on 1 December 2019).
- ISO. 12217-1:2015. Small Craft—Stability and Buoyancy Assessment and Categorization; ISO: Geneva, Switzerland, 2015. [Google Scholar]
- Francescutto, A. Intact stability criteria of ships—Past, present and future. In Proceedings of the 12th International Conference on the Stability of Ships and Ocean Vehicles, Glasgow, UK, 14–19 June 2015. [Google Scholar]
- Tompuri, M.; Ruponen, P.; Lindroth, D. Second generation intact stability criteria and operational limitations in initial ship design. In Proceedings of the PRADS2016, Copenhagen, Dennark, 4–8 September 2016. [Google Scholar]
- Grinnaert, F.; Gualeni, P.; Billard, J.; Laurens, J.; Petacco, N. Application of 2nd generation intact stability criteria on naval ships. In Proceedings of the 15th International Ship Stability Workshop, Stockholm, Sweden, 13–15 June 2016. [Google Scholar]
- Mauro, F.; Braidotti, L.; Trincas, G. A Model for intact and damage stability evaluation of CNG ships during the concept design stage. J. Mar. Sci. Eng. 2019, 7, 450. [Google Scholar] [CrossRef] [Green Version]
- Kianejad, S.S.; Lee, J.; Liu, Y.; Enshaei, H. Numerical assessment of roll motion characteristics and damping coefficient of a ship. J. Mar. Sci. Eng. 2018, 6, 101. [Google Scholar] [CrossRef] [Green Version]
- International Maritime Organization. Available online: http://www.imo.org/en/MediaCentre/MeetingSummaries/SDC/Pages/SDC-6.aspx (accessed on 28 June 2020).
- European Commission. Communication from the Commission to the Council and the European Parliament on Improving Fishing Capacity and Effort Indicators under the Common Fisheries Policy. 2007. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex:52007DC0039 (accessed on 15 December 2019).
- European Commission. The Common Fisheries Policy, a User’s Guide. 2009. Available online: https://www.eea.europa.eu/policy-documents/the-common-fisheries-policy-cfp (accessed on 15 December 2019).
- European Commission. Facts and Figures on the Common Fisheries Policy. Basic Statistical Data, 2018 Edition. 2012. Available online: https://publications.europa.eu/en/publication-detail/-/publication/08d4994e-4446-11e8-a9f4-01aa75ed71a1 (accessed on 15 December 2019).
- Xunta de Galicia Repor. Consellería de Pesca e Asuntos Maritimos. Available online: http://www.orzancongres.com/administracion/upload/imgPrograma/Miguel%20L%C3%B3pez%20Sieiro.pdf (accessed on 15 December 2019).
- CIAIM. Annual Report; Permanent Commission for the Investigation of Maritime Accidents and Incidents; Spanish Ministry of Development: Madrid, Spain, 2014. Available online: http://www.fomento.gob.es/MFOM/LANG_CASTELLANO/ORGANOS_COLEGIADOS/CIAIM (accessed on 15 December 2019).
- Wang, J.; Pillay, A.; Kwon, Y.S.; Wall, A.D.; Loughran, C.G. An analysis of fishing vessel accidents. Accid. Anal. Prev. 2005, 37, 1019–1024. [Google Scholar] [CrossRef] [PubMed]
- Míguez, M.; Bulian, G. Influence of ship dynamics modelling on the prediction of fishing vessels roll response in beam and longitudinal waves. Ocean Eng. 2018, 148, 312–330. [Google Scholar] [CrossRef] [Green Version]
- Liwång, H. Exposure, vulnerability and recoverability in relation to a ship’s intact stability. Ocean Eng. 2019, 187, 106218. [Google Scholar] [CrossRef]
- Gunnu, G.R.; Moan, T. Stability assessment of anchor handling vessels during operations. J. Mar. Sci. Tech. 2018, 23, 201–227. [Google Scholar] [CrossRef]
- Lee, B.S. Intact stability criteria. In Hydrostatics and Stability of Marine Vehicles. Springer Series on Naval Architecture, Marine Engineering, Shipbuilding and Shipping; Springer: Singapore, 2019; Volume 7, pp. 109–117. [Google Scholar] [CrossRef]
- Lapa, K.N. Estimation of stability for a fishing vessel and some considerations. IOP Conf. Ser. Mater. Sci. Eng. 2018, 400. [Google Scholar] [CrossRef] [Green Version]
- Manderbacka, T.; Themelis, N.; Bačkalov, I.; Boulougouris, E.; Eliopoulou, E.; Hashimoto, H.; Konovessis, D.; Leguen, J.; Míguez-González, M.; Rodríguez, C.A.; et al. An overview of the current research on stability of ships and ocean vehicles: The STAB2018 perspective. Ocean Eng. 2019, 186, 106090. [Google Scholar] [CrossRef]
- Mata, F. Fishing Effort Control Regulations Influence on Stability, Safety and Operability of Small Fishing Vessels: Study of a Series of Stability Related Accidents Occurred in Spain between 2004 and 2007. Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 2014. [Google Scholar]
- Paroka, D.; Umeda, N. Prediction of capsizing probability for a ship with trapped water on deck. J. Mar. Sci. Technol. 2006, 11, 237–244. [Google Scholar] [CrossRef]
- Paroka, D.; Umeda, N. Effect of freeboard and metacentric height on capsizing probability of purse seiners in irregular beam seas. J. Mar. Sci. Technol. 2007, 12, 150–159. [Google Scholar] [CrossRef]
- Marine Accident Investigation Branch (MAIB). Available online: https://www.gov.uk/government/organisations/marine-accident-investigation-branch (accessed on 1 November 2019).
- The European Maritime Safety Agency (EMSA). Available online: http://www.emsa.europa.eu/ (accessed on 1 November 2019).
- De Ramón, J. Estabilidad de Buques Pesqueros (In Spanish). Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 1972. [Google Scholar]
- Deaking, B. Collating evidence for a universal method of stability assessment or guidance. Inter. J. Marit. Eng. 2010, 152 Pt A2, 85–91. [Google Scholar] [CrossRef]
- Wolfson Unit. Research Project 559. Loading Guidance for Fishing Vessels Less than 12m Registered Length. Phase II. Final Report. 2006. Available online: http://www.wumtia.soton.ac.uk/sites/default/files/1903_2bd.pdf (accessed on 1 December 2019).
- USA Coast Guard Code of Federal Regulations. Title 46; Cruise Ship National Center of Expertise (CSNCOE): Miami, FL, USA, 2016; Volume 7. [Google Scholar]
- Deakin, B. An experimental evaluation of the stability criteria of the HSC Code. In Proceedings of the 8th International Conference on Fast Sea Transportation (FAST 2005), St. Petersburg, Russia, 27–30 June 2005; pp. 1–9. [Google Scholar]
- RD. 543/2007. Available online: https://www.boe.es/boe/dias/2007/06/01/pdfs/A23806-23891.pdf (accessed on 1 November 2019).
- IMO. Resolutions and Other Decisions of the 17th Assembly. A.685 (17) Resolution. Weather Criterion for Fishing Vessels of 24 Meters in Length and Over; IMO: London, UK, 1992. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vessel | Lpp (m) | B (m) | GM (m) | e70 (rad*m) |
|---|---|---|---|---|
| A | 18.15 | 6.00 | 0.391 | 0.379 |
| 1 | 16.20 | 5.30 | 0.475 | 0.199 |
| 2 | 13.50 | 5.20 | 0.589 | 0.019 |
| 3 | 14.06 | 5.00 | 0.449 | 0.115 |
| 4 | 9.00 | 2.52 | 0.908 | 0.097 |
| 5 | 18.40 | 5.88 | 0.786 | -0.027 |
| 6 | 24.00 | 6.50 | 0.375 | 0.616 |
| 191 | 16.44 | 5.88 | 1.133 | 0.12 |
| 244 | 19.70 | 6.00 | 0.775 | 0.122 |
| 247 | 16.00 | 5.75 | 1.45 | 0.19 |
| 250 | 15.50 | 5.00 | 0.845 | 0.124 |
| 271 | 19.50 | 6.20 | 0.882 | 0.161 |
| 303 | 24.00 | 8.00 | 0.727 | 0.428 |
| 318A | 16.00 | 5.50 | 0.679 | 0.237 |
| 318B | 22.40 | 7.00 | 0.512 | 0.281 |
| 403 | 18.60 | 5.90 | 0.593 | 0.058 |
| 404 | 15.40 | 5.75 | 1.688 | 0.359 |
| 408 | 18.00 | 6.20 | 0.419 | 0.304 |
| 413A | 23.00 | 6.50 | 0.419 | 0.364 |
| 413B | 21.40 | 6.50 | 0.416 | 0.394 |
| 414 | 23.88 | 7.50 | 0.531 | 0.218 |
| 416 | 22.50 | 6.70 | 0.425 | 0.366 |
| 421 | 16.86 | 5.84 | 0.86 | 0.127 |
| DX | 12.40 | 5.00 | 0.418 | 0.191 |
| CCN | 18.00 | 6.30 | 1.526 | 0.308 |
| 1C | 16.35 | 5.70 | 1.243 | 0.392 |
| 3C | 18.75 | 6.45 | 0.919 | 0.131 |
| 6C | 16.20 | 5.10 | 1.22 | 0.239 |
| 8C | 16.22 | 5.20 | 0.642 | 0.128 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alvite-Castro, J.; Orosa, J.A.; Vergara, D.; Costa, Á.M.; Bouzón, R. A New Design Criterion to Improve the Intact Stability of Galician Small Fishing Vessels. J. Mar. Sci. Eng. 2020, 8, 499. https://doi.org/10.3390/jmse8070499
Alvite-Castro J, Orosa JA, Vergara D, Costa ÁM, Bouzón R. A New Design Criterion to Improve the Intact Stability of Galician Small Fishing Vessels. Journal of Marine Science and Engineering. 2020; 8(7):499. https://doi.org/10.3390/jmse8070499
Chicago/Turabian StyleAlvite-Castro, Jesús, José A. Orosa, Diego Vergara, Ángel M. Costa, and Rebeca Bouzón. 2020. "A New Design Criterion to Improve the Intact Stability of Galician Small Fishing Vessels" Journal of Marine Science and Engineering 8, no. 7: 499. https://doi.org/10.3390/jmse8070499