Analysis and Selection of Deployment Methods for a Wave Glider System


Abstract
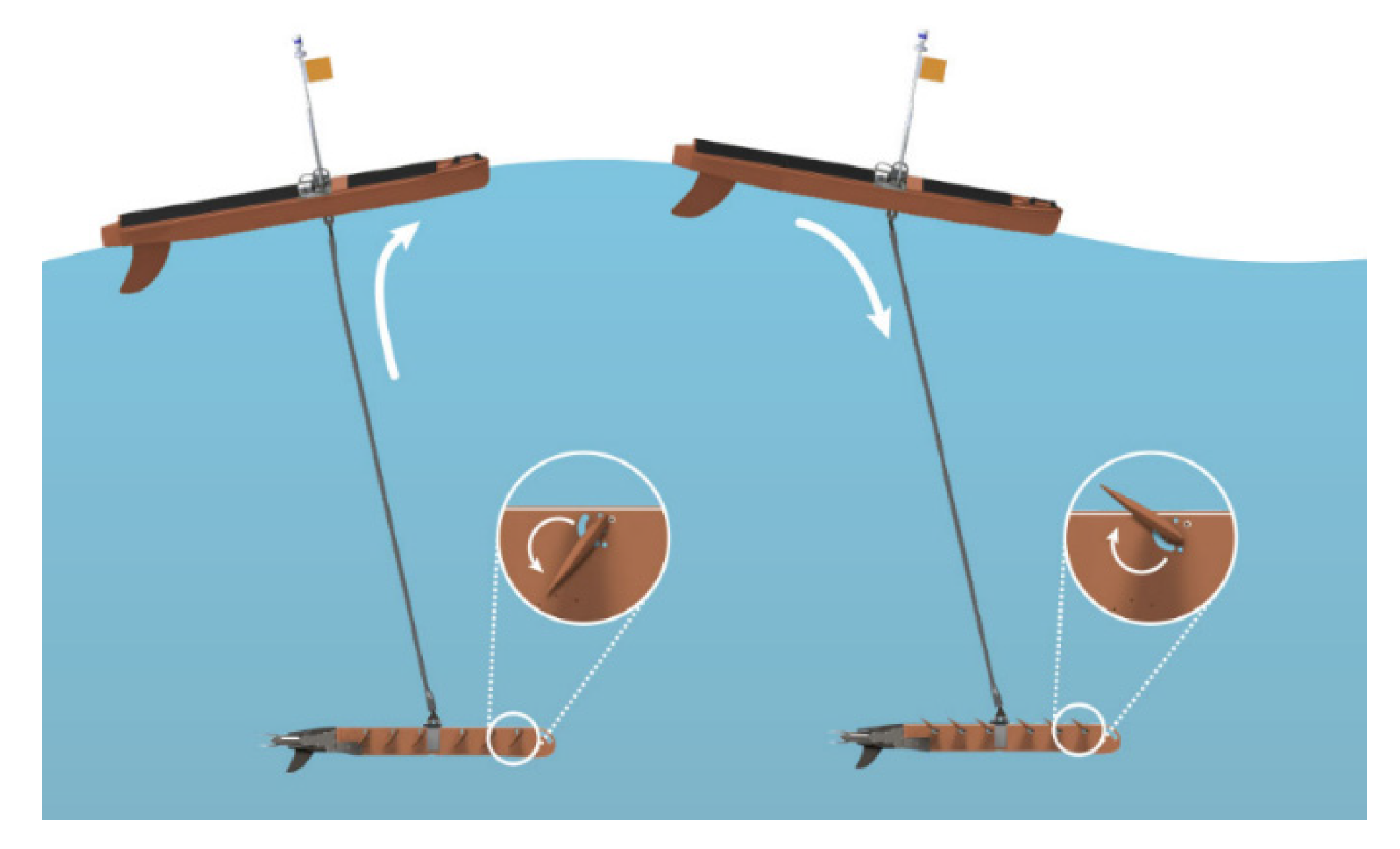
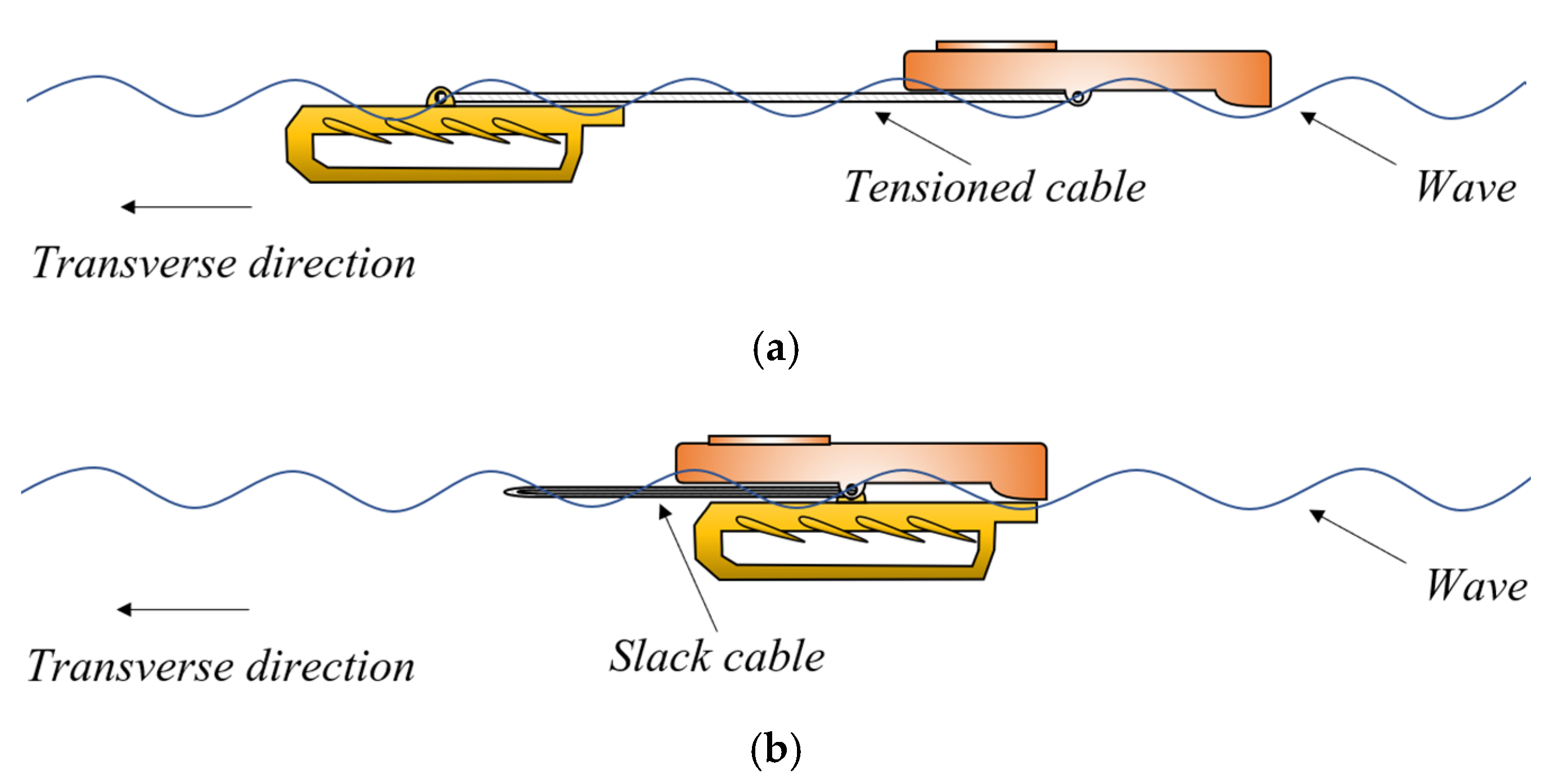
:1. Introduction
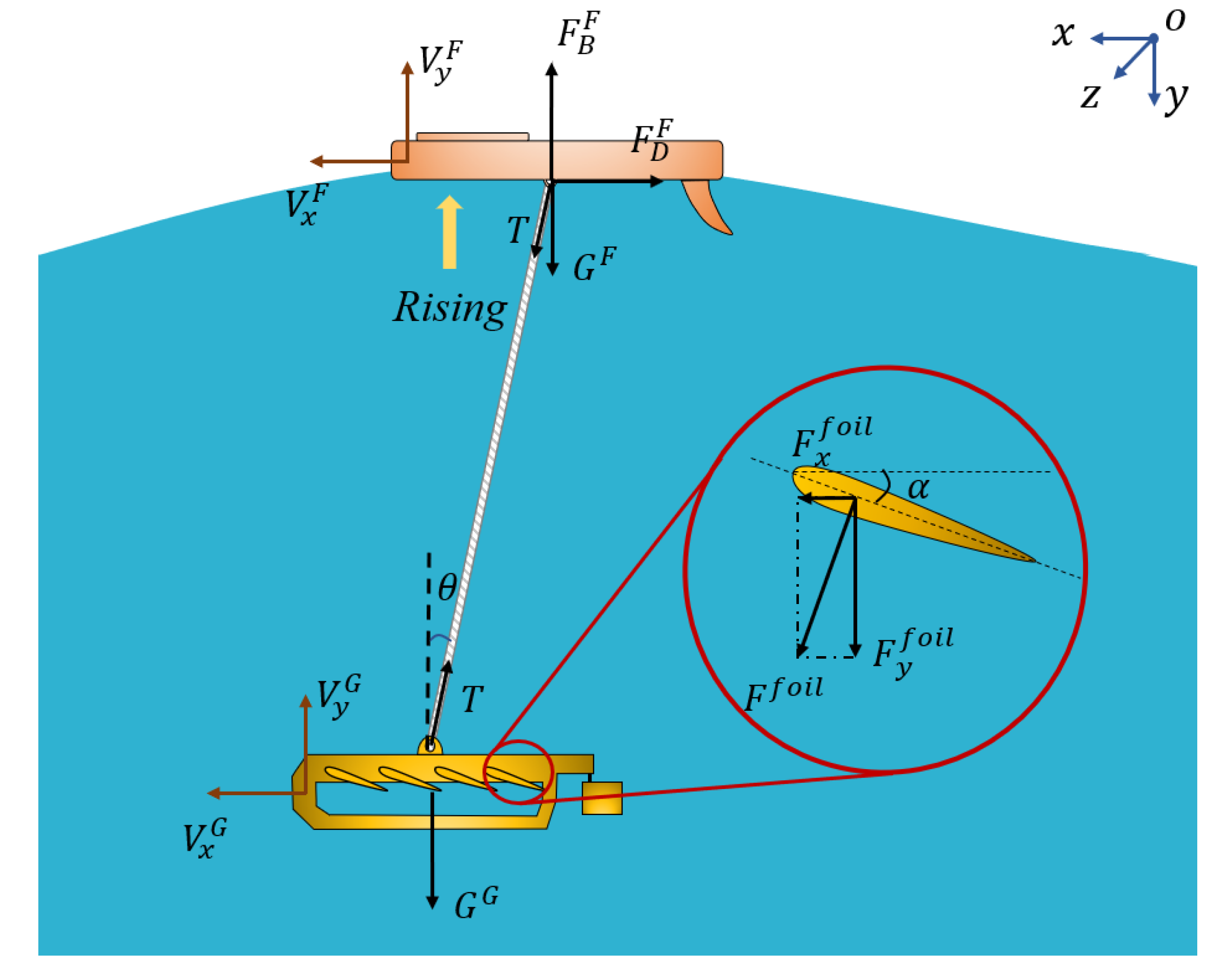
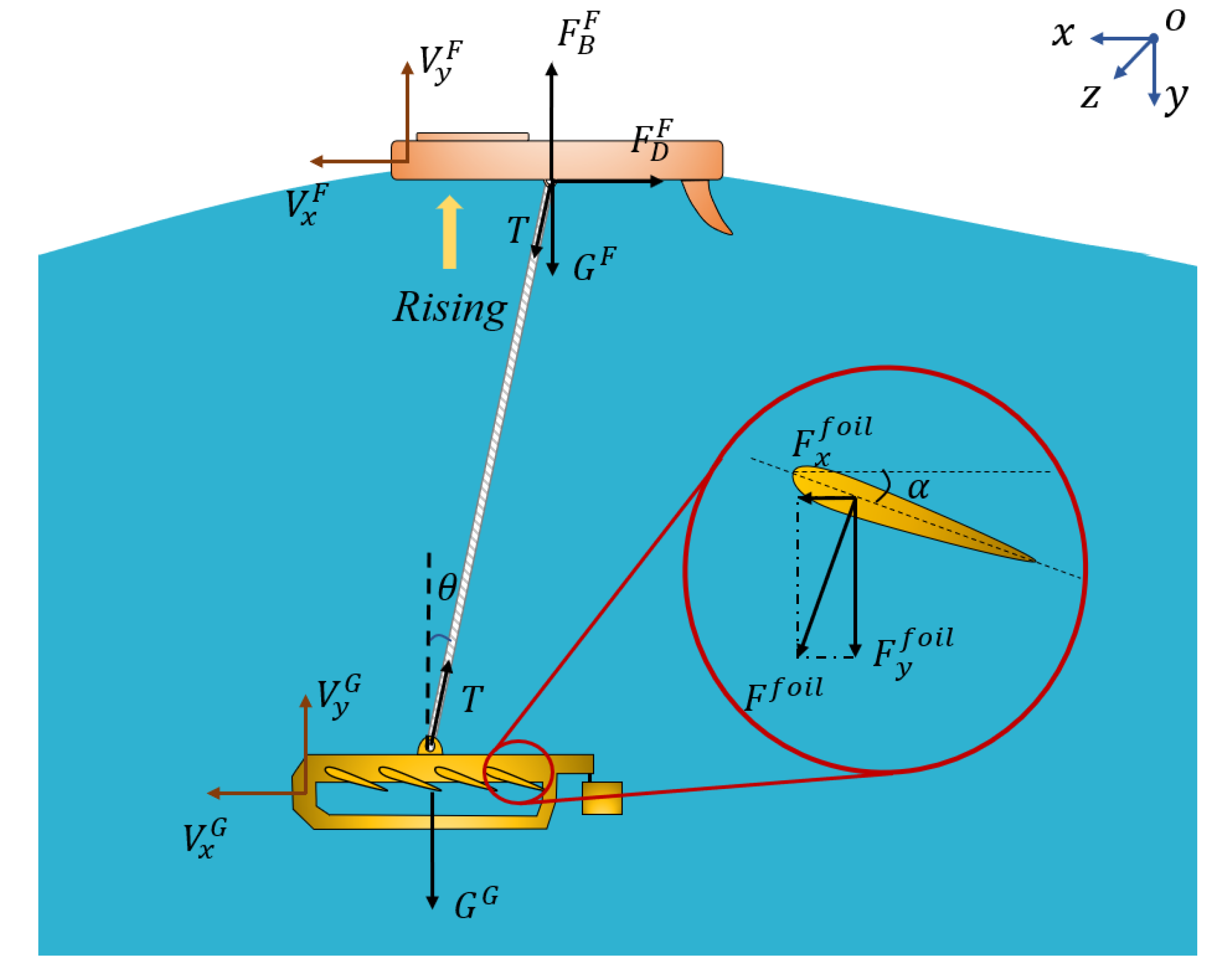
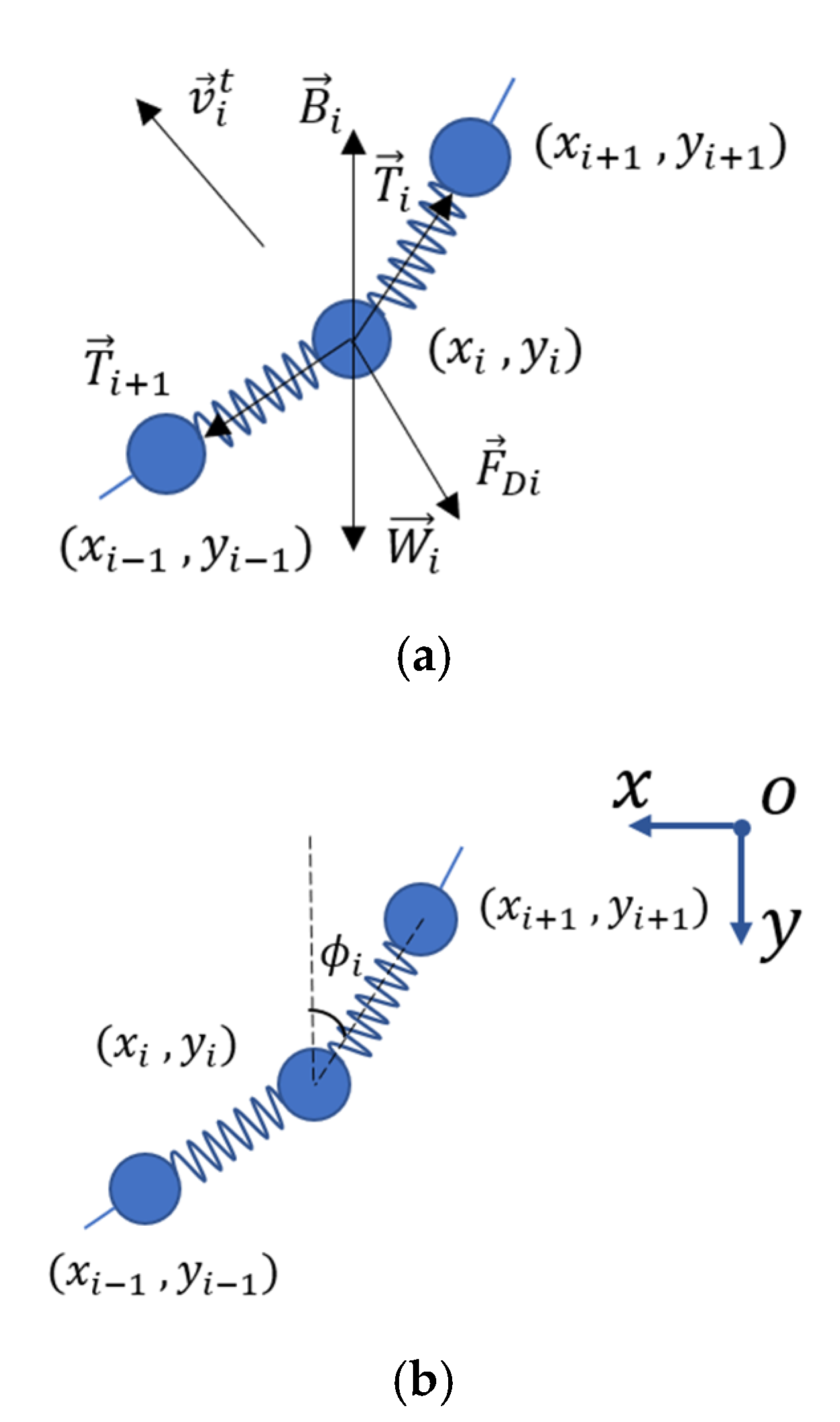
2. Multibody Dynamic Models of Wave Gliders
- Heave and sway motion are only considered for the float and glider, and the model is established in a vertical plane.
- The mass center of the float and glider is located on the hinged joint. The cable has no effects on the wave glider system when it is slack.
- The hydrodynamics parameters are calculated based on potential theory, thus, this model is not adapted to extreme sea states.
- Concentrated forces are calculated to act on the wave glider system directly and the relative motion between seawater and the wave glider is neglected.
- The vortexes and wakes caused by the hydrofoil’s rotation are neglected.
3. Simulation Analysis
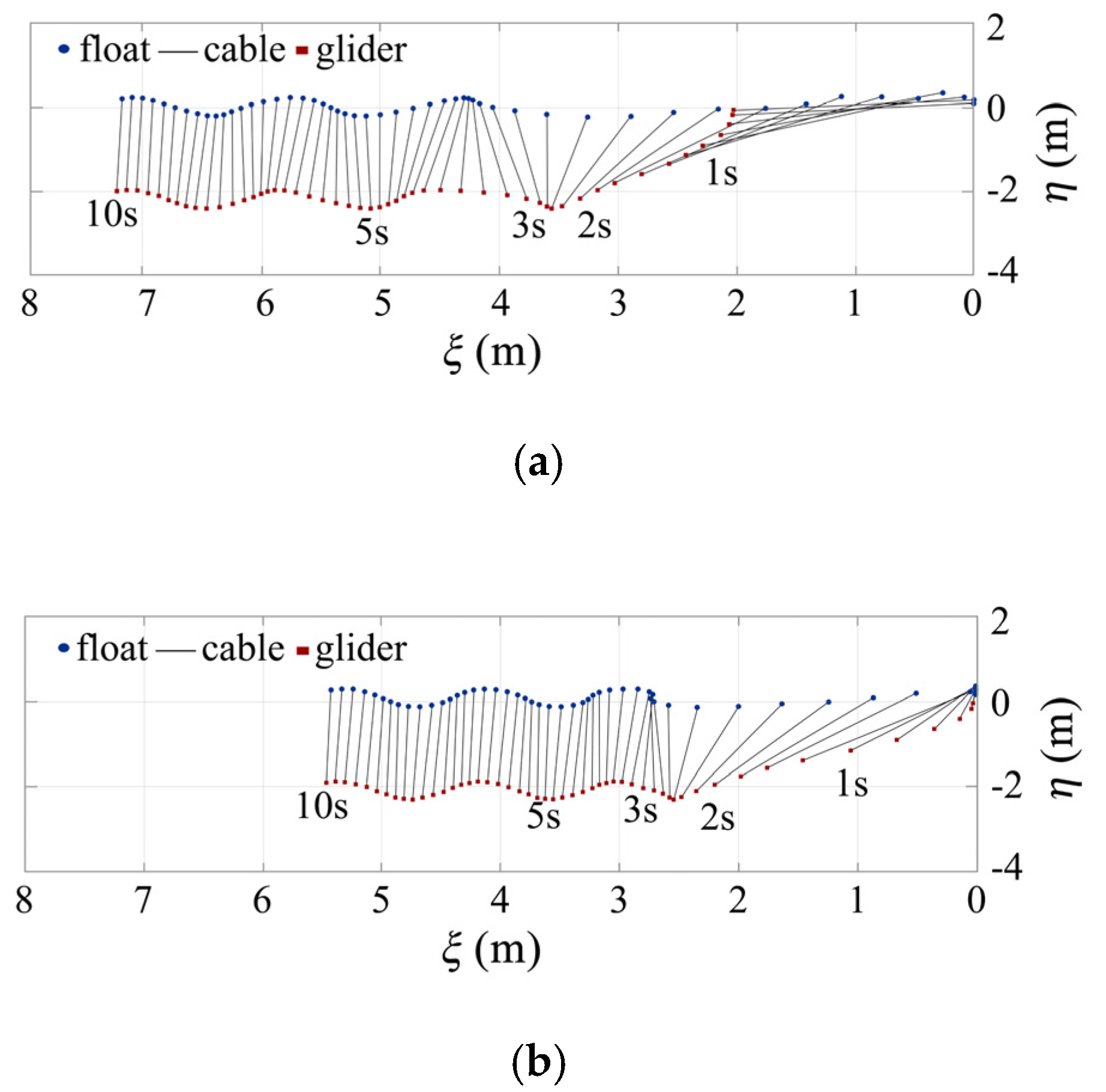
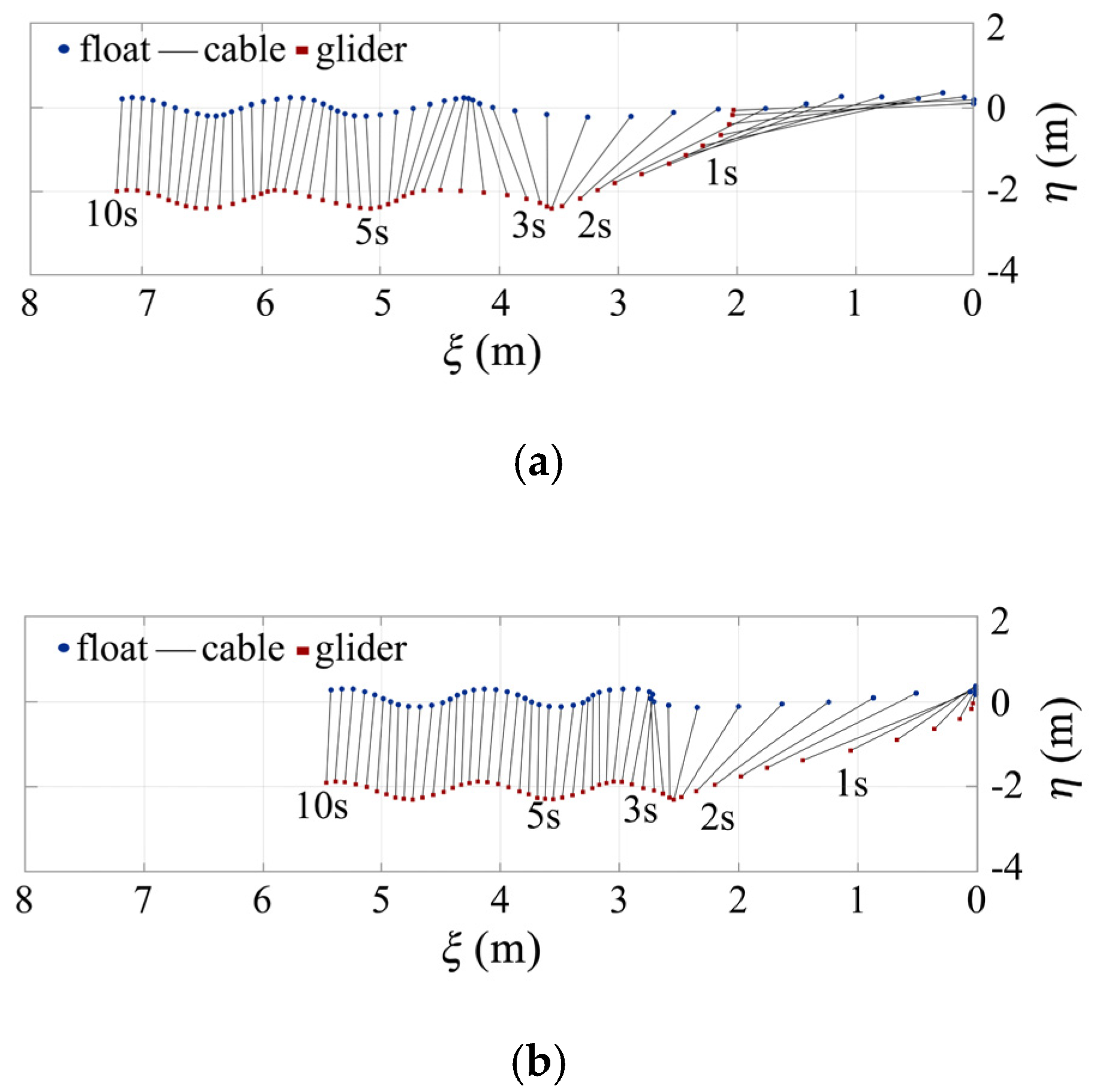
3.1. Displacement Analysis of the Wave Glider
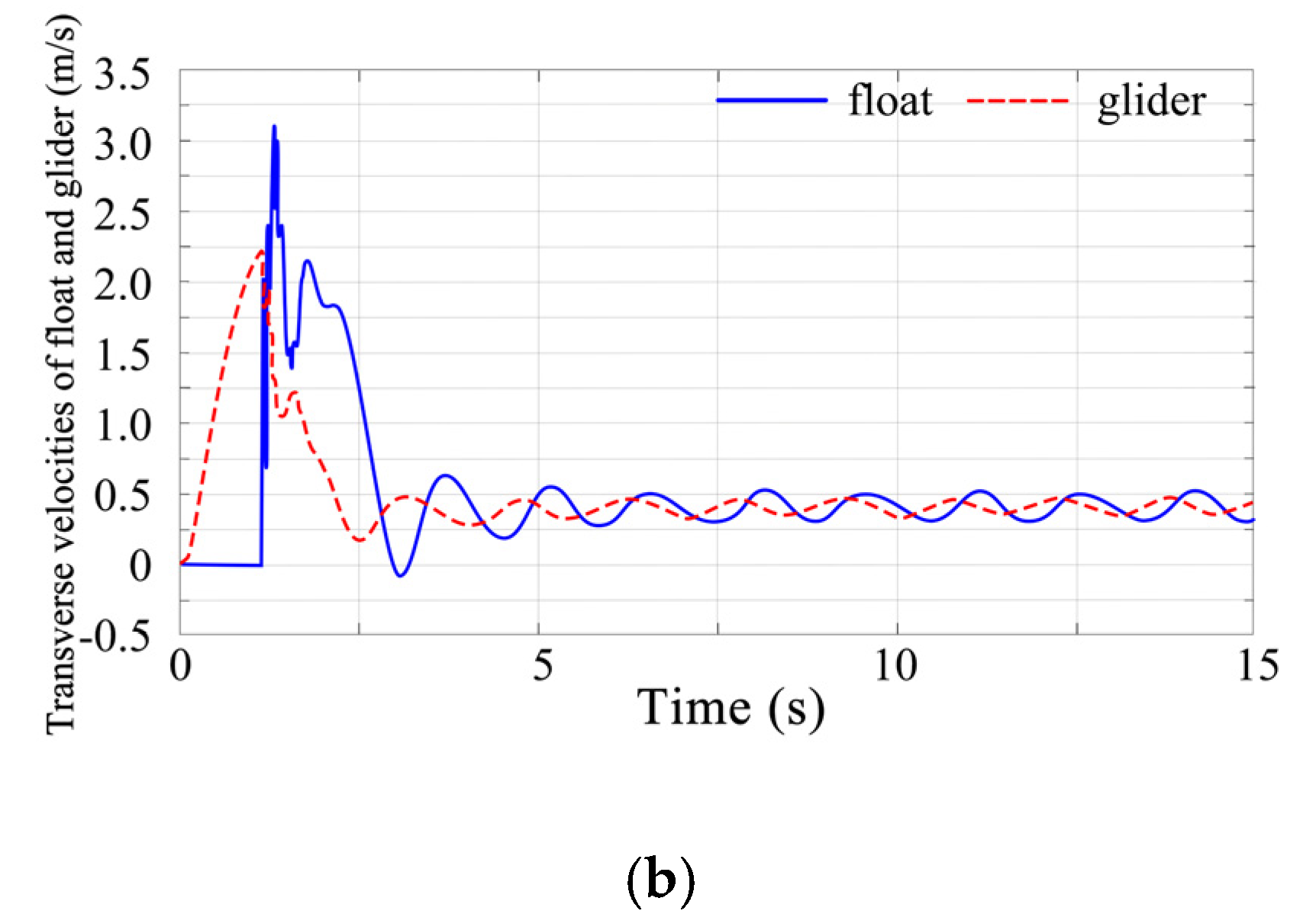
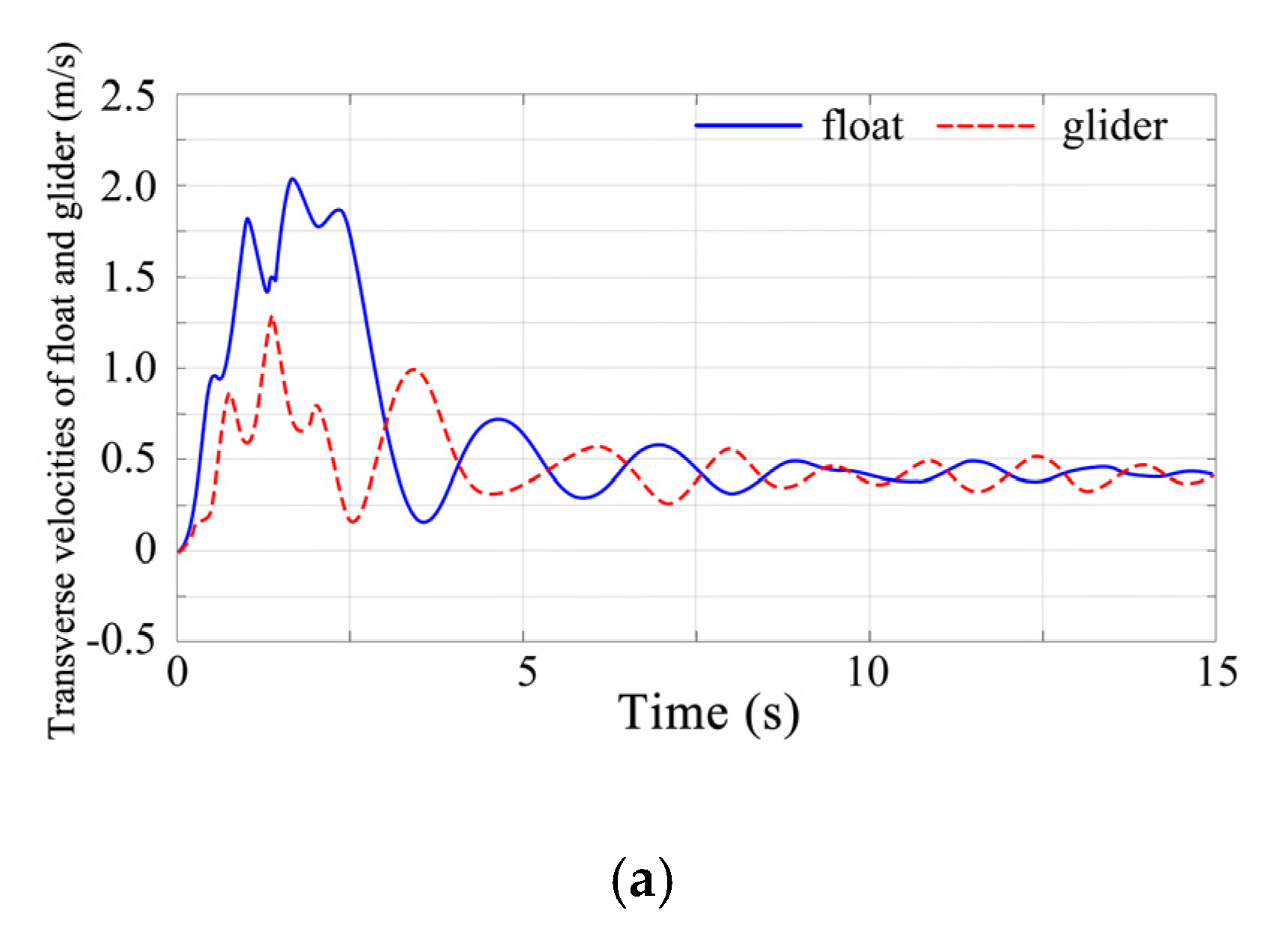
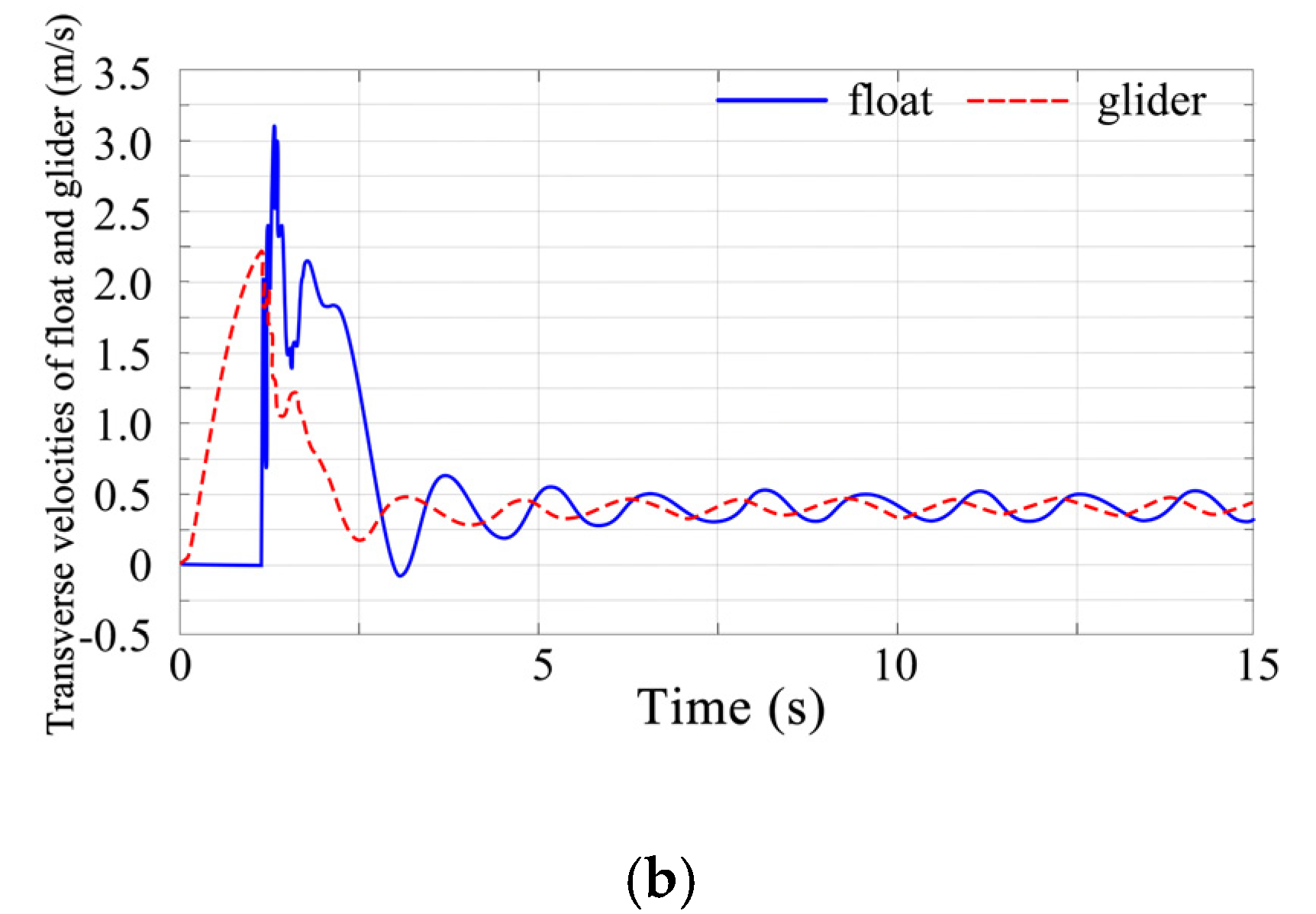
3.2. Velocity Analysis of the Wave Glider
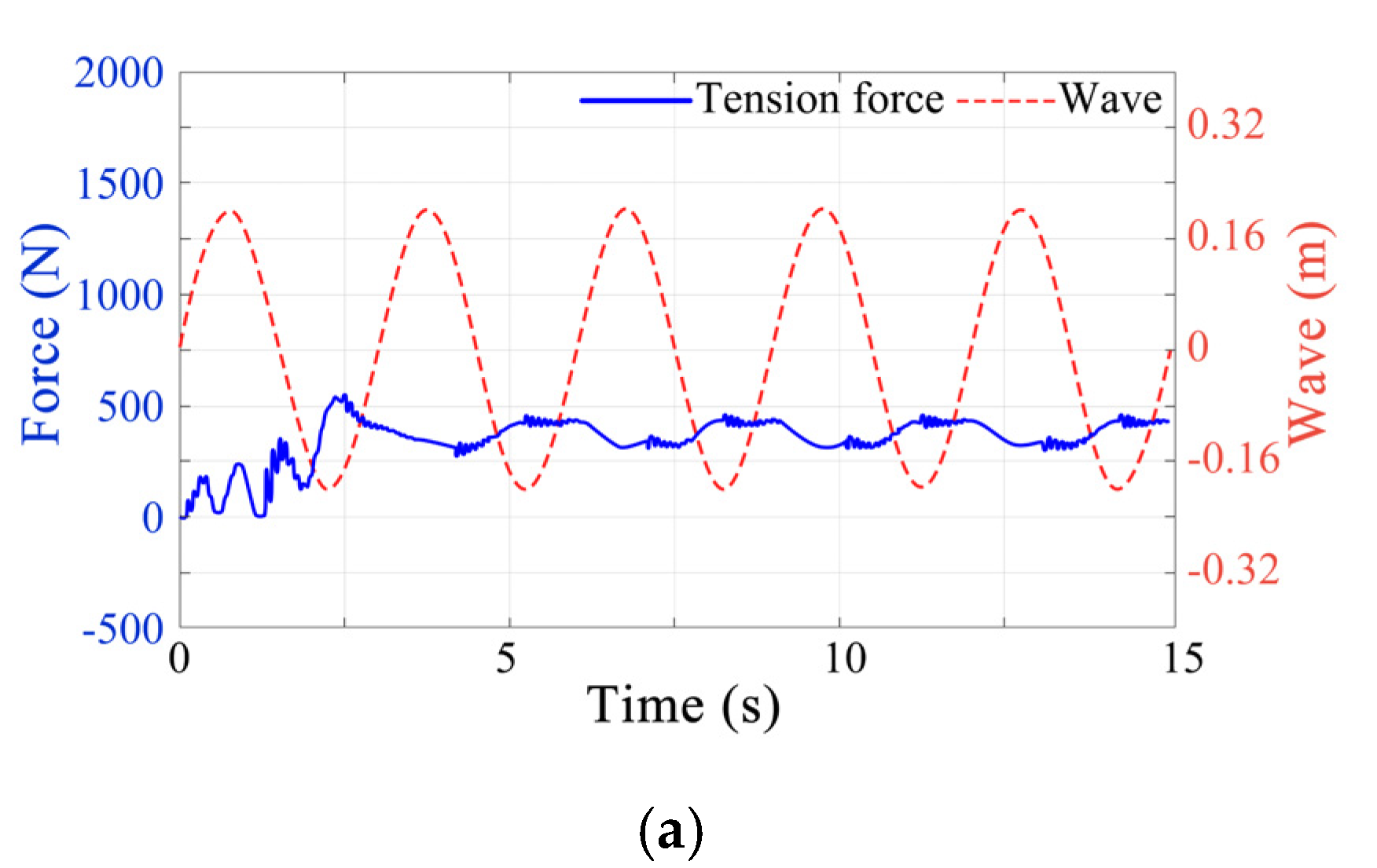
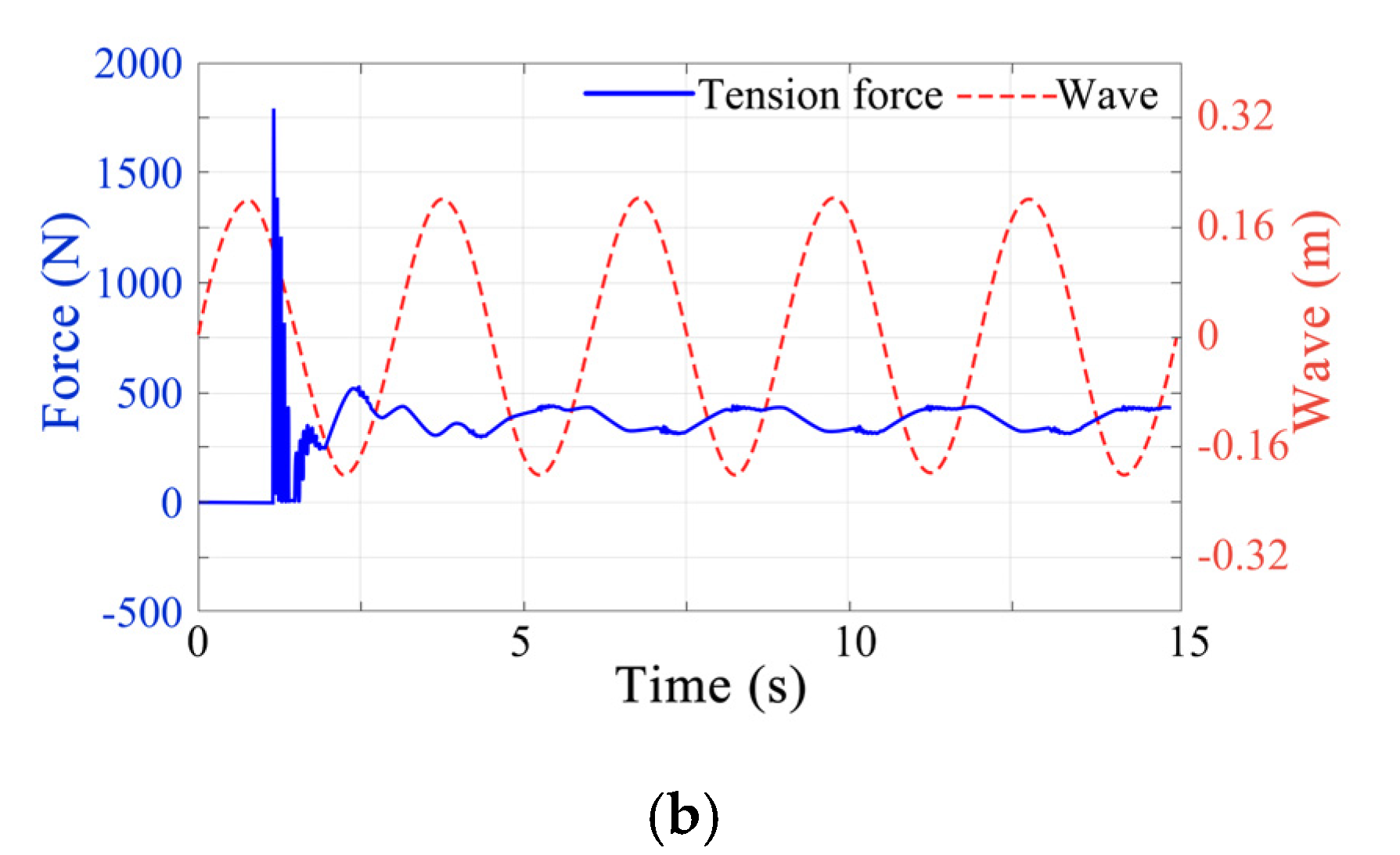
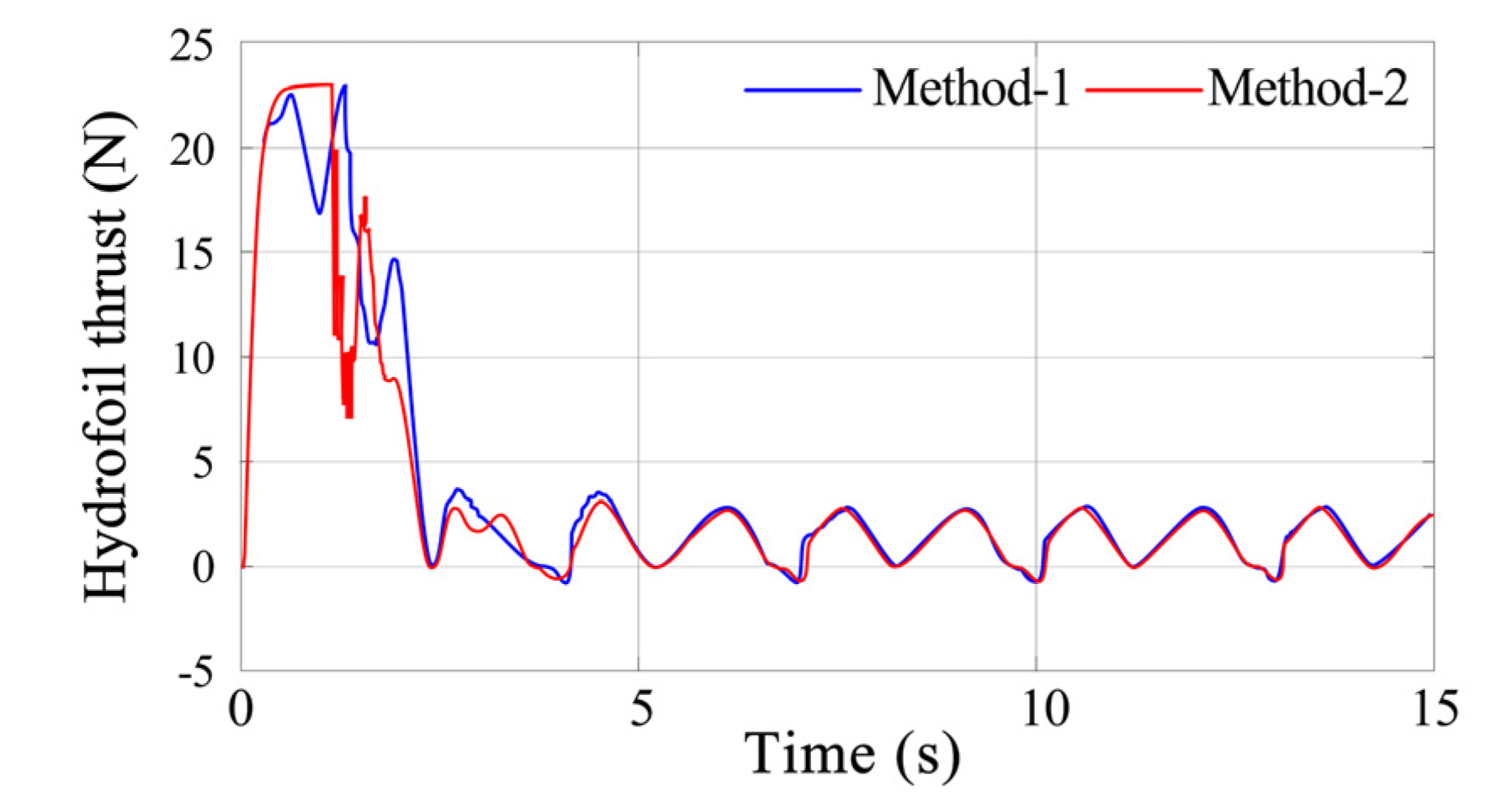
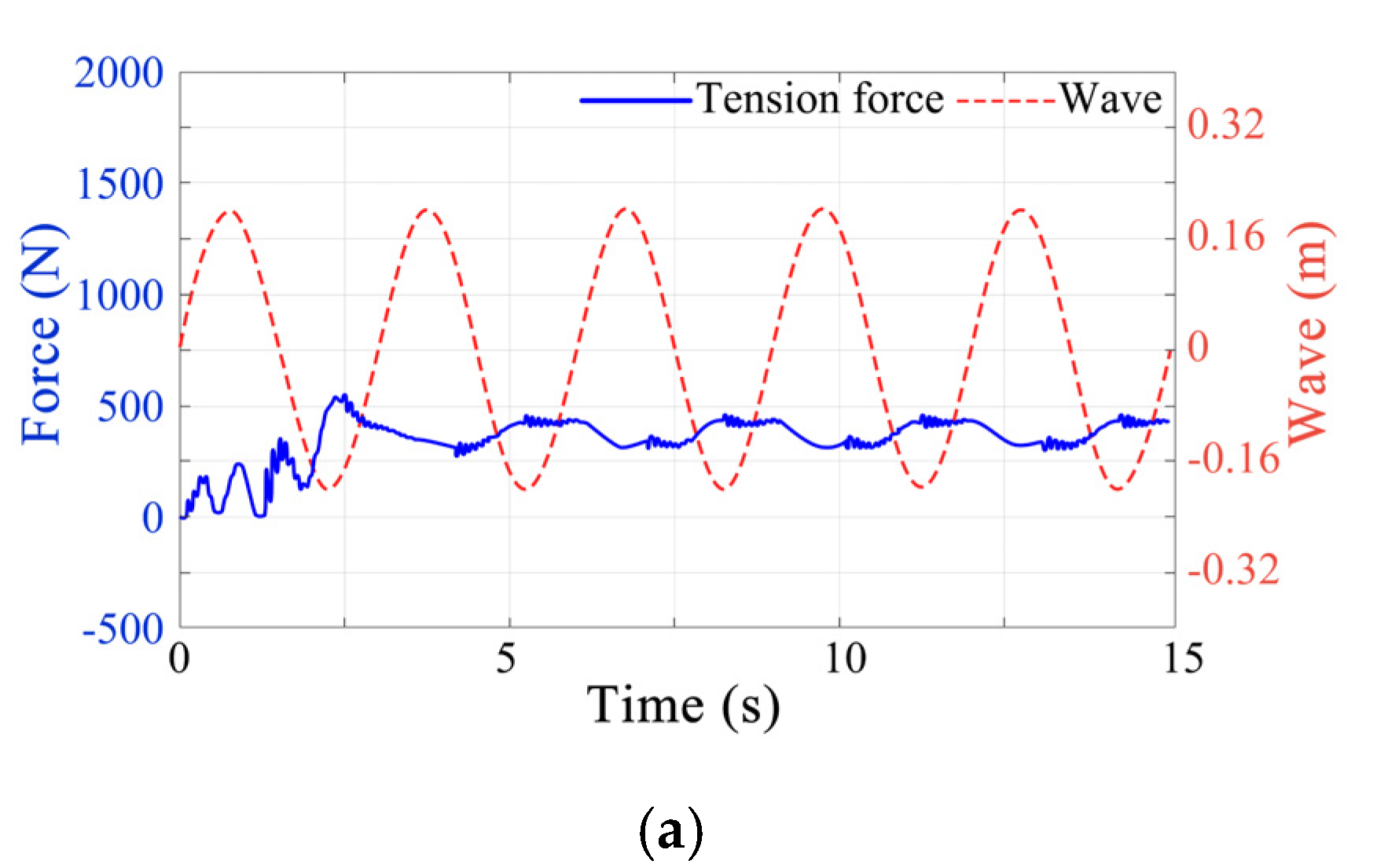
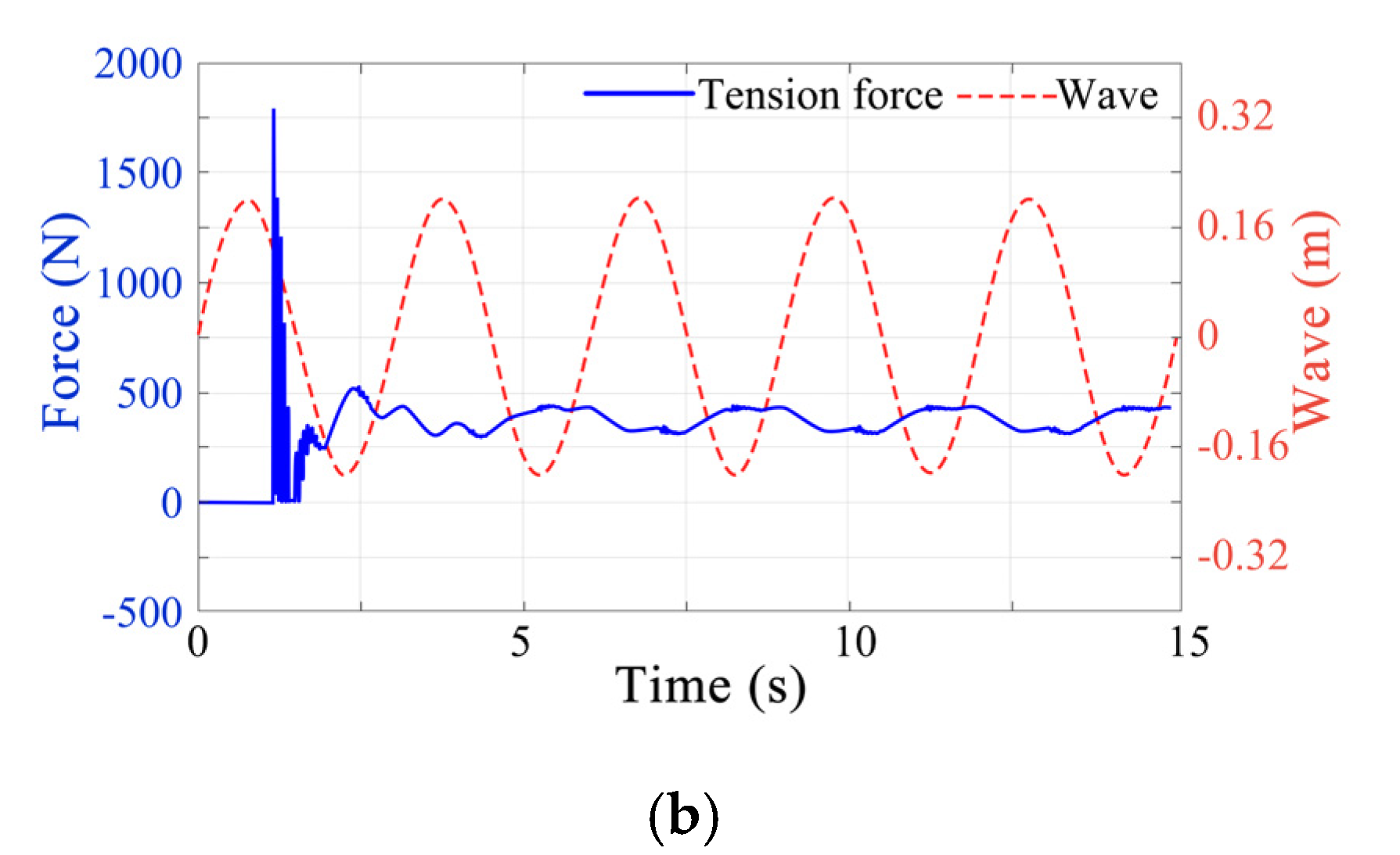
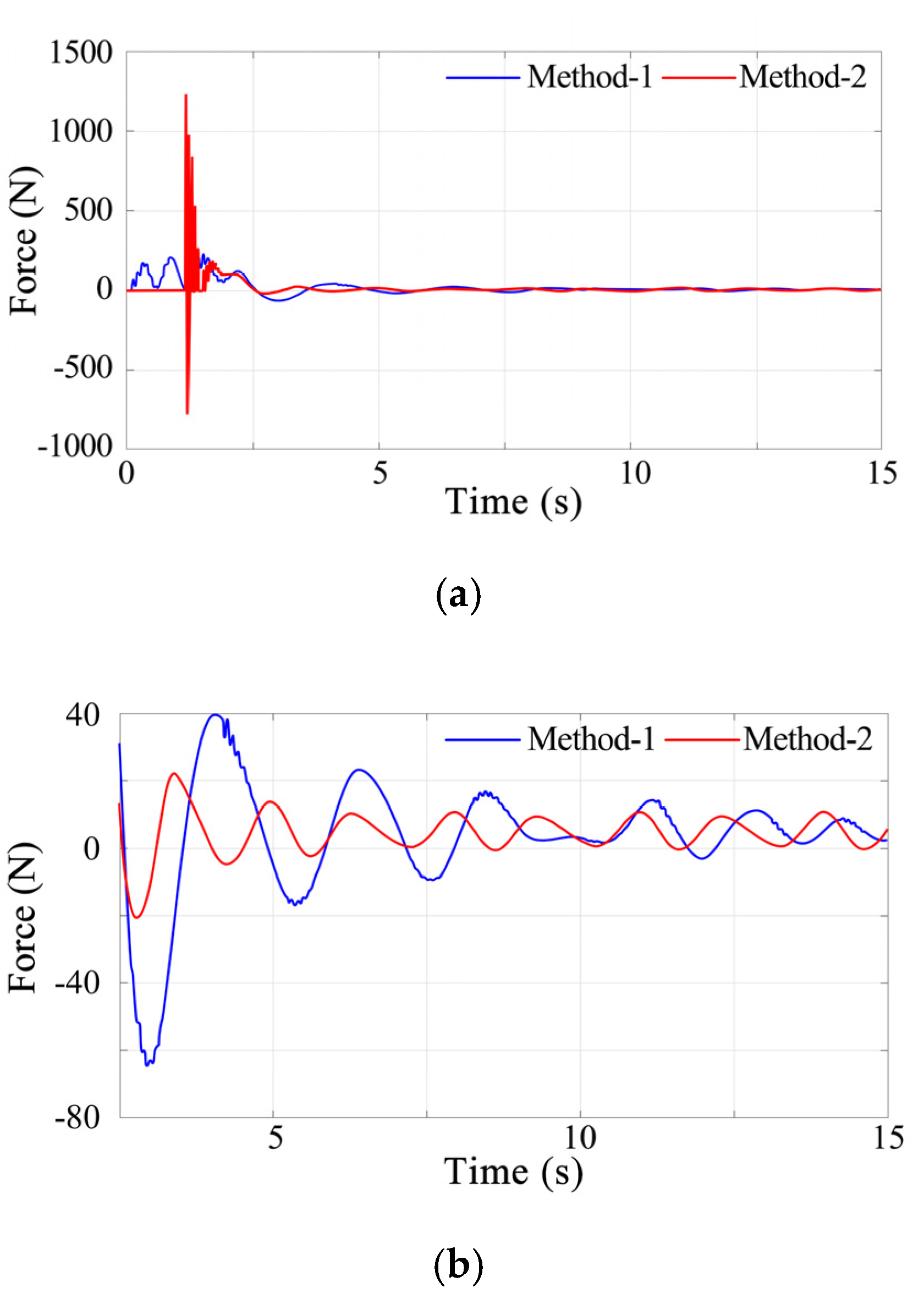
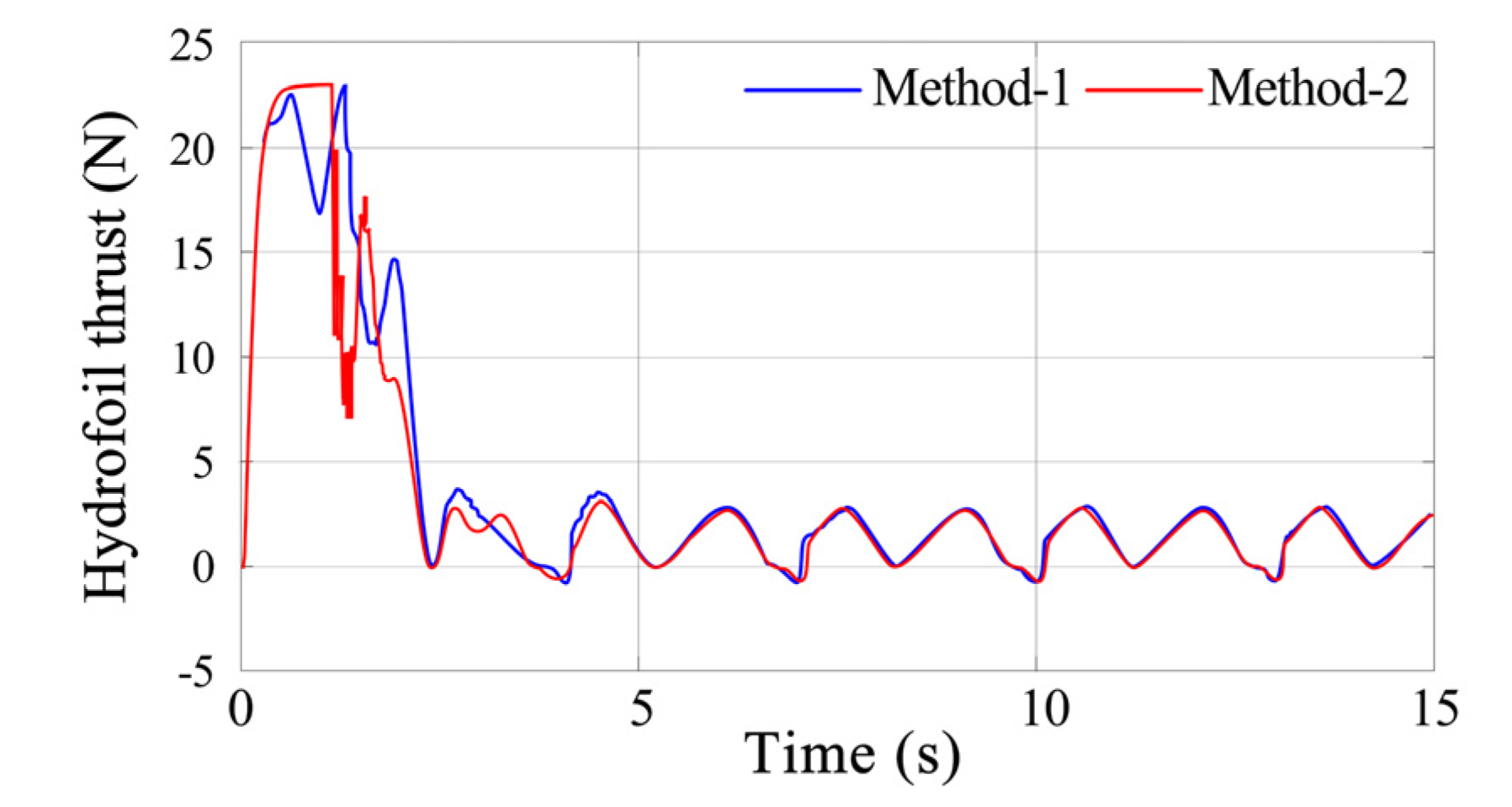
3.3. Force Analysis of the Wave Glider during Process of Deployment
4. Conclusions
- The displacement performance of two different methods was discussed. By analyzing deployment displacement curves, it can be seen that the wave glider system behaves unstably at the beginning of deployment, and then it tends to be stable after 5 s. Method 1 has a larger displacement than Method 2.
- The velocity characteristics were obtained. Although the average velocity is not very different for each method, a sudden change of velocity will occur at 1.2 s when Method 2 is selected.
- Deployment methods have quite an effect on tension force of the hinged joint between the cable and float. Method 2 suffers more serious tension than Method 1, which will lead to serious extra load on the structure of the wave glider. However, Method 1 performs more stably under the same conditions. Overall, Method 1 has smaller sudden impacts of the tension force and the best performance.
Author Contributions
Funding
Conflicts of Interest
References
- Alaaeldeen, M.E.A.; Duan, W.Y. Overview on the development of autonomous underwater vehicles (AUVs). J. Ship Mech. 2016, 20, 768–787. [Google Scholar]
- Villareal, T.A.; Wilson, C. A comparison of the pac-X trans-pacific wave glider data and satellite data (MODIS, aquarius, TRMM and VIIRS). PLoS ONE 2014, 9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, F.M.; Shi, W.C.; Wang, D.Z. Systematic study on propulsive performance of tandem hydrofoils for a wave glider. Ocean Eng. 2019, 179, 361–370. [Google Scholar] [CrossRef] [Green Version]
- KRAUS, N.D. Wave glider dynamic modeling, parameter identification and simulation. Ph.D. Thesis, University of Hawaii, Honolulu, HI, USA, 2012. [Google Scholar]
- Caiti, A.; Calabró, V.; Grammatico, S.; Munafó, A.; Stifani, M. Lagrangian modeling of the underwater wave glider. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011; 2011; pp. 1–6. [Google Scholar]
- Qi, Z.F.; Liu, W.X.; Jia, L.J.; Qin, Y.F.; Sun, X.J. Dynamic modeling and motion simulation for wave glider. Appl. Mech. Mater. 2013, 397, 285–290. [Google Scholar] [CrossRef]
- Zhou, C.L.; Wang, B.X.; Zhou, H.X.; Li, J.L.; Xiong, R. Dynamic modeling of a wave glider. Front. Inf. Technol. Electron. Eng. 2017, 18, 1295–1304. [Google Scholar] [CrossRef]
- Feng, Z.X.; Chang, Z.Y.; Zheng, Z.Q.; Wang, P.F. Effects of Connection Type between Surface Vessel and Submersible Propeller on Motion Performance of Wave Glider. Appl. Sci. 2018, 8, 2467. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.Y.; Xu, X.S. Research on Motion Relationship Between the Surface Boat and the Wave-Propelled Sub in Wave Glider System. J. Sichuan Ordnance 2018, 52, 127–132. [Google Scholar]
- Wang, L.F.; Li, Y.; Liao, Y.L.; Pan, K.W.; Zhang, W.X. Dynamics modeling of an unmanned wave glider with flexible umbilical. Ocean Eng. 2019, 180, 267–278. [Google Scholar] [CrossRef]
- Yang, F.M.; Shi, W.C.; Zhou, X.; Guo, B.; Wang, D.Z. Numerical investigation of a wave glider in head seas. Ocean Eng. 2018, 164, 127–138. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Gong, W.; Qi, Z.F.; Jia, L.Y.; Zhang, F.; Qin, Y.F. Research of wave glider navigation control strategy based on multi-sensor. Transducer Microsyst. Technol. 2014, 33, 23–30. [Google Scholar]
- Wang, P.; Tian, X.L.; Lu, W.Y.; Hu, Z.H.; L, Y. Dynamic modeling and simulations of the wave glider. Appl. Math. Model. 2019, 66, 77–96. [Google Scholar] [CrossRef]
- Cong, B.; Cui, H.L.; Liu, Z. Modeling and Virtual Simulation in Random Ocean Waves. J. Xi’an Technol. Univ. 2009, 5. [Google Scholar]
- Wang, H.; Eberhard, P.; Lin, Z.Q. Modeling and simulation of closed loop multibody systems with bodies-joints composite modules. Multibody Syst. Dyn. 2010, 24, 389–411. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Mass of the float | 41 kg |
| Mass of the glider | 50 kg |
| Float dimension | |
| Underwater gravity of the glider | 380 N |
| Area of hydrofoil | 600 cm2 |
| Length of the cable | 2 m |
| Drag coefficients | 1.5 |
| Spring stiffness | 106 N/m |
| Limit angle | 25° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Chang, Z.; Zheng, Z.; Zhang, J.; Feng, Z.; Lu, G. Analysis and Selection of Deployment Methods for a Wave Glider System. J. Mar. Sci. Eng. 2020, 8, 529. https://doi.org/10.3390/jmse8070529
Wang X, Chang Z, Zheng Z, Zhang J, Feng Z, Lu G. Analysis and Selection of Deployment Methods for a Wave Glider System. Journal of Marine Science and Engineering. 2020; 8(7):529. https://doi.org/10.3390/jmse8070529
Chicago/Turabian StyleWang, Xiuyuan, Zongyu Chang, Zhongqiang Zheng, Jiakun Zhang, Zhanxia Feng, and Guiqiao Lu. 2020. "Analysis and Selection of Deployment Methods for a Wave Glider System" Journal of Marine Science and Engineering 8, no. 7: 529. https://doi.org/10.3390/jmse8070529
APA StyleWang, X., Chang, Z., Zheng, Z., Zhang, J., Feng, Z., & Lu, G. (2020). Analysis and Selection of Deployment Methods for a Wave Glider System. Journal of Marine Science and Engineering, 8(7), 529. https://doi.org/10.3390/jmse8070529