1. Introduction
The implementation of ECDIS on board ships has brought changes in navigational procedures that have particularly affected navigator’s routines with regards to preparing and executing a voyage. Preparation and execution of voyage are of vital importance for the safety of life at sea, navigational safety, and pollution prevention [
1]. As a result of the abovementioned changes, there are still some problems that could pose a threat to navigational ventures, including proper handling with the ECDIS system, previous knowledge, and interpretation. New tools require additional level of knowledge and understanding [
2,
3]. The determination of parameters defining safety margins in the system is proposed in this paper. The Cross Track Limit (XTL) could be described as the minimum safety corridor along the navigational route which is defined by end user. Meanwhile, the Cross Track Distance (XTD) usually represents the XTL value or individual max cross track distance for each route leg. Furthermore, Cross Track Error (XTE) alarm will be triggered when the vessel deviation from the route plan is larger than the set XTL value. However, the XTL value and determination methods are still not regulated, which could mislead the navigator. Simultaneously, the XTL calculation method is rarely prescribed from companies’ internal navigational procedures in accordance with the International Safety Management Code (ISM Code). Meanwhile, in case of missing navigational procedures, the value will be determined by the navigator. Theoretical knowledge of safety parameters and their adjustment are essential for navigation safety. In order to properly and adequately set the XTL parameter, the user must be able to know its value, as well as the affecting factors. When these prerequisites are satisfied, the user can create the route and validate it.
The aim of the research is to define the effect of chart accuracy and other factors on the determination of the XTL value and suggest XTL determination method. The research is based on analyses of previous studies and recommendations on factors affecting value of the XTL. The influence of navigational chart accuracy represented by Category of Zones of Confidence (CATZOC) which is assigned to the geographical areas to indicate whether data meets the minimum set for criteria is expressed by Zone of Confidence (ZOC) value which is one of the main factors for positional and depth accuracy of the chart survey. The ZOC value directly reflects the depth accuracy for safety depth or UKC determination (vertical value) and position accuracy (horizontal value) for XTL determination. These two parameters are significant ECDIS minimum safety settings which need to be proper set by end-user. Furthermore, navigational procedures from a few different international shipping companies were evaluated in order to identify procedures’ similarities. Research of several shipping companies’ ECDIS navigational procedures reveals that, although describing same procedures, there are still notable differences in practice [
4]. In this paper different approaches to the XTL determination were identified, showing significant differences, which can potentially lead a vessel towards danger, causing marine accidents, such as grounding or pollution. The XTL is primarily safety tool in the ECDIS system. Its role to keep a vessel on safe distance from navigational dangers depends on navigator’s knowledge given the proper setting of safety parameters. Although ECDIS offers great safety tools not limited solely to the XTL, if not properly used or understood it could become danger to safety of navigation.
The previous research chapter refers to general ECDIS features, providing relevant information for the research, including previous research for Zone of Confidence (ZOC) impact together with Cross Track Limit Determination. Furthermore, in the next chapter the research methodology is based on general consideration of Passage Planning with respect of Cross Track Limit parameter together with discussion of XTL determination among the different shipping companies. The results have been shown significant differences in XTL determination. Due to findings, the aim of the research is to define method of XTL determination for one of the significant ECDIS safety parameter which is suggested according to the pre-defined criteria. In the conclusion chapter, summarized findings are presented in order to raise situational awareness and detailed understanding of navigators’ interpretation of safety parameters together with educational process improvement.
2. Previous Research
Setting of safety parameters is not a novelty in a long history of navigation. Modern day’s navigation, which ECDIS is a part of, includes large number of pre-set safety parameters. These parameters tend to increase safety of navigation and automatize some tasks. It is elaborated by several authors that correct use of ECDIS can only be achieved if the end-user understands safety settings and alarms, but also correctly interprets information on the ECDIS display [
2,
3]. Safety settings that are set by the user himself have great significance for the navigational safety [
5]. These settings must be defined for each leg, and includes safety contour, safety depth, shallow contour, deep contour, XTL, and look-ahead settings [
6]. Setting of the XTL is part of basic passage planning settings by the end-user on ECDIS system. It has a major impact on safety of navigation, as it defines safety distance between the vessel and potential hazards. Furthermore, it is important to find the proper value determination which will consider all the significant factors. Small or insufficient value of XTL will cause navigational hazards which are close to the route to pass undetected; meanwhile, if oversized it will create a huge number of alarms [
7]. Relative terms are not acceptable in safe navigation; therefore, the XTL parameter must be exact.
Well investigated and analyzed grounding of m/t Ovit in September 2013 among other factors was caused by poor passage planning and no usage of the XTL safety parameter at all [
8,
9]. Official investigation of grounding of vessel “Nova Cura” on 20th April 2016 on her voyage from Eregli on the Black Sea (Turkey) to Aliaga (Turkey) reveals interesting facts. Vessel run aground on shallows that were wrongly shown on Electronic Navigational Charts (ENC) by 0.2 nautical miles northerly of actual position. Due to unfamiliarity with the CATZOC concept, the crew were not aware that significant errors could be present on the ENC. As a result, a poorly set XTL value leads to the vessel grounding [
10]. Another investigation of the incident highlighted importance of adequate XTL setting and revealed serious deficiencies in passage planning and execution [
11]. The ro-ro ferry Commodore Clipper’s route was planned too close to a charted hazard, at the area that is well known by lower quality of survey data. Unfortunately, the quality of survey was not considered during passage planning process and was a contributing factor to this accident. Theoretical knowledge for ECDIS minimum safety parameters setting at the beginning relies on educational standards from the International Maritime Organization (IMO) model Courses [
12]. These standards are cornerstone for setting ECDIS safety awareness and reduce the vessel incidents caused from poor ECDIS handling.
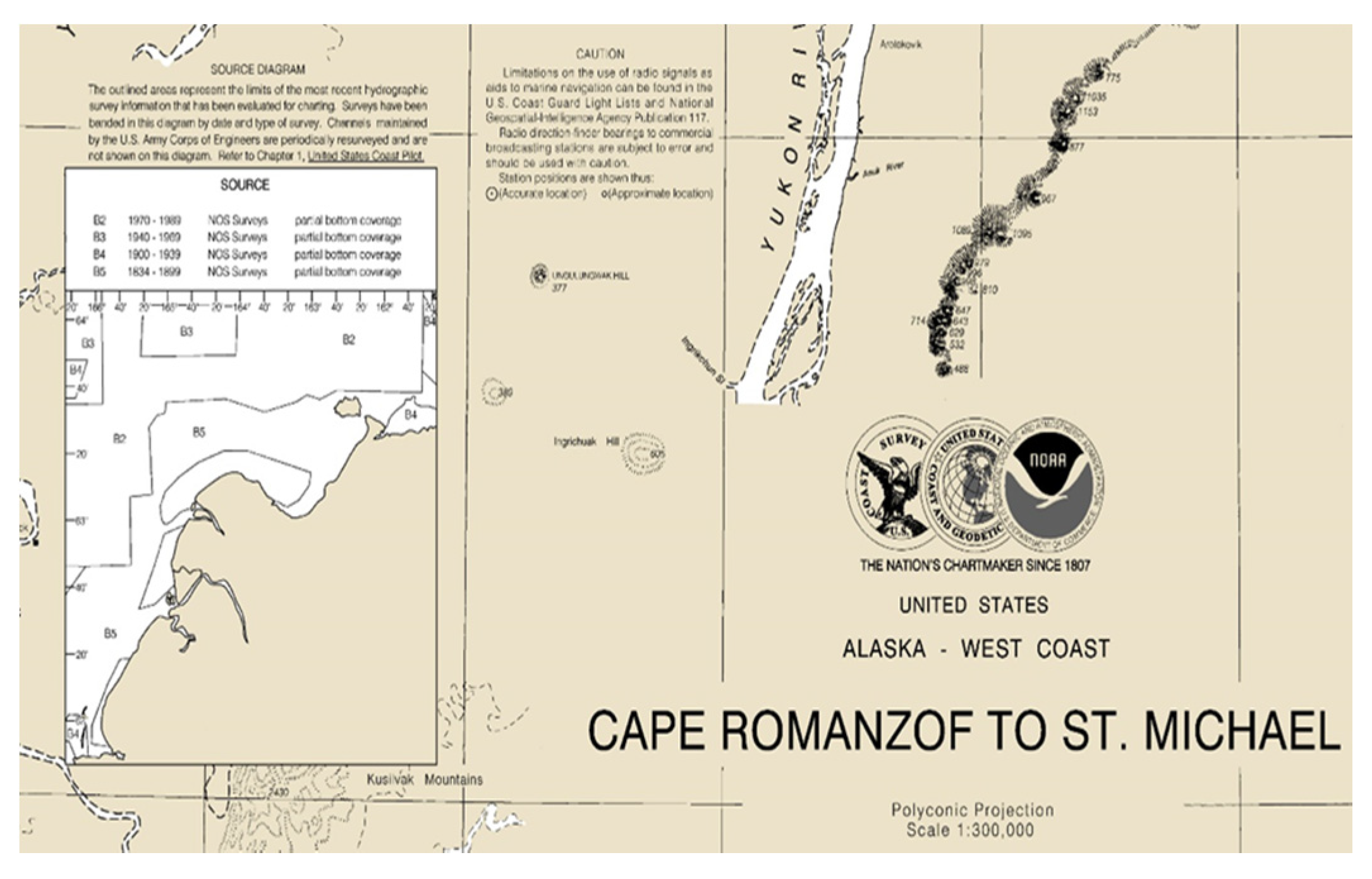
Chart accuracy is one of the most relevant factors affecting safety of navigation. At the time before the ECDIS system, navigators were using source diagram data on the Paper Navigational Chart (PNC) that was providing survey data accuracy. Unfortunately, this data was mainly showing survey age without chart quality information (
Figure 1).
From the source diagram data user could only assume data quality depending on the year of the survey, so navigation officers and masters were mostly passing on safe distance from the obstructions, which depended on many factors and their experience. Chart data strongly depends on used survey hydrographic technique. Older survey data could have significant errors. According to Mariners’ guide to accuracy of ENC (IHO S-67), survey vessels were able to use satellite-based navigation system for survey purpose only from 1990’s, with an accuracy in the range from 2 to 20 m. It was shore-based electronic positioning that was used by survey vessels from late 1940’s until 1990’s with accuracy from 20 to 100 m. Before this, the accuracy was even worse, as survey vessels used prominent marks on the shore and sextant for measuring horizontal angles in order to find a position, so accuracy of survey was about 50–500 m. If the survey was conducted offshore, it could be based on celestial navigation only, so position accuracy was no better than 1 to 2 nautical miles, and sometimes even worse [
14].
Figure 2 shows that even nowadays on the ENC chart is visible that the CATZOC for the area of Cape Romanzof is still unassessed category like on the Paper Navigational Charts on
Figure 1.
Navigational charts contain mixture of data from different surveys throughout many years with different methods that are connected to form a single chart. Details and interpretation of data quality was varied between hydrographic offices, so International Hydrographic Organization (IHO) developed a new international system, the ZOC system, that will be used by all countries within S-57 Electronic Navigational Charts [
14].
Today, Electronic Navigational Charts use the ZOC system to explain the survey quality [
15]. The survey quality is based on typical survey characteristics together with used technique of sounding. The system consists of six categories, starting from most reliable to unassessed, graphically presented on electronic navigational chart with respective symbol (
Table 1). These CATZOC categories are shown in
Table 1 together with graphically presentation on ENC, position accuracy and typical survey characteristics. The ‘M_QUAL’ quality information layer within ENC contains CATZOC as a mandatory attribute, as well as other optional ‘M_QUAL’ attributes, such as Positional Accuracy (POSACC) and Sounding Accuracy (SOUACC).
Additionally, attributes Survey date—start (SURSTA), Survey date—end (SUREND) and Technique of sounding measurement (TECSOU) are used to indicate the dates of the survey and the technique of sounding [
15]. Furthermore, the use of Satellite Derived Bathymetry (SDB) technology is found mostly accurate to derive depths from remote sensed (RS) data to address crucial aspect of sounding in function of navigation safety [
16].
Position accuracy of navigation hazards as reefs, shallow water, etc., affected by previous bottom surveys is shown in
Table 1. It means that underwater hazards can be closer to vessel’s route planning than we assume. Nowadays, navigators must be used to rely on navigation charts with the fact that data on charts are sometimes unreliable. Illustration of such an uncertainty is shown in
Table 2, which contain analysis of 14 million square kilometers of coastal ENC.
A disturbing fact is that 45.9% of world’s coastal ENC has a low confidence of bathymetric data, and less than 2% of coastal waters have very good level of confidence. Situation beyond coastal waters is even worse, with most ocean waters having CATZOC C, D or U [
15]. In addition, almost all Electronic Navigational Charts are provided with chart uncertainty depiction of the used chart data [
17]. Furthermore, a new study in Sopot also shows that the bathymetric data in ENCs are outdated with significant depth and position discrepancies from the actual results of bathymetric measurements carried out [
18]. Furthermore, a significant gap has been investigating from The Canadian Hydrographic Service (CHS) in the Canadian Arctic by using remote sensing techniques (Satellite-Derived Bathymetry (SDB)) to support hydrographic applications [
19,
20]. In addition, CHS currently has 32% of the Northern Marine Transportation Corridors (NMTC) and only 6% of Canadian Arctic navigational water adequately surveyed to the modern standards [
21,
22]. According to the study in US waters, only 44% has been surveyed, but only 18% with proper new sounding method without discrepancies in bathymetry. Furthermore, for detailed survey remaining area in US waters by using nowadays method to the modern standards would take 12 million linear nautical miles of survey or approximately 177 years of a single platform by running constantly at typical surveyed speed [
23]. Despite that, the automated identification of discrepancies between ENCs and surveyed area could be identified by using of an automatic algorithm for fast gap determination [
24].
Meanwhile, the hydrographic survey frequency is mainly influenced by the country government financial means due to complex and costly procedures [
25]. Despite the significant coast, the survey frequency is also very important in the area where seabed is constantly changing. Recently, the General Bathymetric Chart of the Oceans (GEBCO) released these Multi-Beam Echo-sounder Systems (MBES) datasets, preprocessed and processed with Computer Aided Resource Information System (CARIS). The steep slopes and the rough sand or mud seafloor possibly affect the integrity of the acquired raw data in this chosen method for the area of Arabian Gulf [
26].
Detailed knowledge of bathymetry is increasingly important for navigation safety, given the ever-decreasing safety margins for both surface and underwater operations [
27]. Furthermore, the importance of CATZOC data for XTL value determination is recognized by other sources [
14,
28]. According to the American Practical Navigator, during passage planning process the navigator should check the quality of bathymetric data using CATZOC in order to assist safe distance determination from navigational hazards. The XTL of each leg during the voyage can be adjusted considering navigational areas from open sea to confined waters. The navigator also must consider other factors in order to plan for worst case scenario.
Among other factors, safety value for collision avoidance possibility should be considered as the additional external factor [
29]. Furthermore, XTL determination should be considered according to the Master’s decision [
30]. Accordingly recommended relevant settings for Passage Planning and Route Monitoring on Very Large Crude Carrier (VLCC) are given in
Table 3.
The defined division of the navigational areas (Confined, Coastal, and Open sea area) is used in this paper relating to the different company procedures. According to [
31], the XTL is defined by the end-user to port and starboard side of the planned route; however, it can differ at each leg. Considering the frequency of changing the safety parameters during the voyage monitoring, XTL value resultant will change as well. This means that, on a long voyage, there will be several different XTL values throughout the voyage plan.
3. General Consideration of Passage Planning with Respect to Cross Track Limit Parameter
The navigational process can be divided into four components: appraisal, detailed voyage planning, voyage plan execution, and the vessel monitoring in the implementation plan [
1]. During the voyage planning process, the navigator selects best route verifying ship’s constraints against route constraints or hazards [
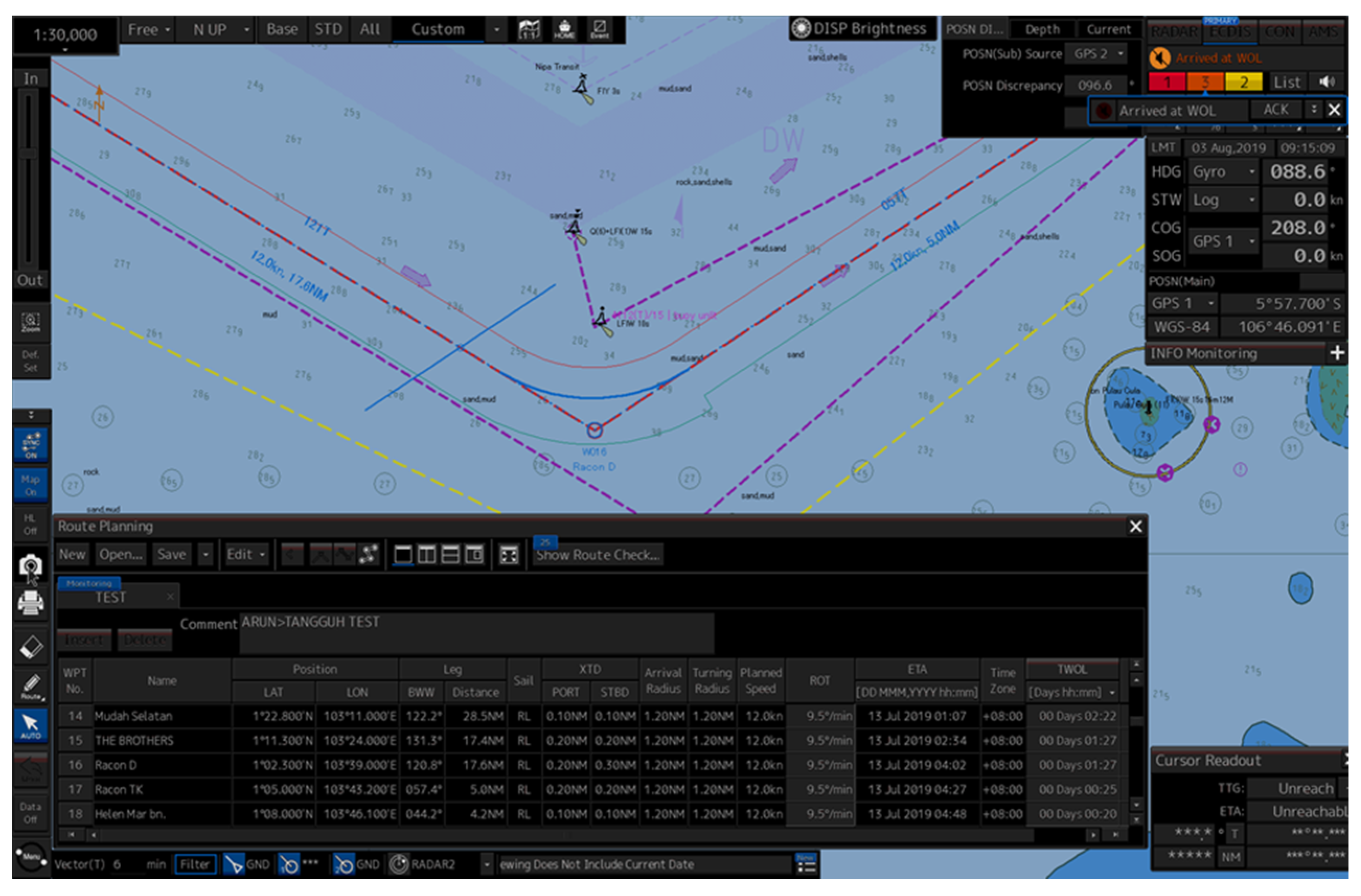
32]. Navigational hazards inside safety corridor bounded by the XTL will be automatically detected during the route validation process. This process forms final part of passage planning process. The ECDIS system allows operator to easily input value of the XTL for each leg of the route during passage planning. Furthermore, it is possible to unsymmetrically adjust the XTL value, i.e., the value of port and starboard side of the XTL can be different (
Figure 3). Voyage plan is set with different XTL determination value for each leg by using ECDIS model Japan Radio Company JAN 9201 in this study.
Route validation is final part of route planning process. It is an automatic route scan, initiated by navigator at the end of passage planning. Dangers on both sides of route to the width of the XTL are scanned, and alarm is initiated when a danger is detected. Finally, at the end of the scanning process, the list of hazards will be generated. This will be used by the user to correct and modify a route to safely pass from departure to arrival point. Another importance of the XTL is active role during the voyage execution. In a case when a vessel exits pre-set XTL, Cross Track Error alarm will inform user for the necessity to return to the safe waters. The XTE alarm is the requirement of the International Maritime Organization (IMO) resolution, once when XTL is exceeded [
33,
34]. The IHO publication S-67 gives an example of minimum distance calculation from potential hazard. Furthermore, an example presents a situation where underwater reef is marked on navigational chart where ZOC is equal to A2, vessel’s maximum breadth is 30 m, Global Navigation Satellite System (GNSS) positioning accuracy is 15 m, and vessel’s orientation/motion increase additional 5 m. This example illustrates how to set the safe distance from underwater hazards where the vessel should avoid hazard at distance at least 55 m (
Table 4).
This is an example of minimum distance from hazard, where grounding or other accident should not occur, but in this case, vessel will still pass extremely close to the danger. The significant factors for safe distance calculation in order to determine safer XTL value in function of increasing navigation safety and raising situational awareness are used in this paper.
5. Determination of the XTL Value in the ECDIS System with Case Study
In order to correctly determine the XTL, identification of all influential factors is required. Recommendations from previous researches were considered while creating appropriate solution. Determination factors for minimum distance determination from navigational hazard were used in this paper, with addition of navigational area safety allowance. Navigational area safety allowance serves as a safety buffer, in order to allow vessel to pass on safe distance from hazard. Navigational area is defined through the company SMS navigational procedures. According to analyses various shipowner companies, differences has been notice in navigational area defining. For one of the companies, navigational areas are based on basically two navigational areas for safety settings determination in ECDIS system: open and coastal area; meanwhile, other companies established three navigational areas. The safety buffer value from company SMS is used directly from the currently navigational area according to vessel’s position. Mostly used common division of three navigational areas on harbor/confined, coastal and open sea is used in order to reflect different navigational circumstances in disparate navigable waters. Accordingly, factors that must be considered are: CATZOC accuracy of bathymetric data, vessel’s beam, own position accuracy, navigational area safety allowance and vessel’s orientation safety allowance due to environmental effects and course change. When all above mentioned factors are considered, the following Equation (1) is created:
where
dzoc = ZOC position accuracy;
db = half vessel’s beam;
dpos = own position accuracy;
dna = navigational area safety allowance;
dso = vessel’s orientation safety allowance. The suggested equation allows definition of XTL for different circumstances. Therefore, the XTL values corresponding to different legs of voyage could be calculated and used during passage planning appraisal process and passage monitoring. In the following example, a vessel with length over all 280 m and breadth 43 m on specific route was considered for the case study. With regards to ZOC position accuracy, reference depths required for calculation of ZOC A1 position accuracy should be taken from navigational charts covering desired route. Furthermore, in this example used reference depths are 30 m (Harbor and confined waters), 50 m (Coastal navigation), and 200 m (Open Sea). Position accuracy for ZOC D is not exact, and according to ZOC system it is worse than zone C. Correspondingly XTL for harbor and confined waters in ZOC D was not calculated, as passing confined water on such accuracy is not advisable. Own vessel position accuracy obtained by GNSS is 15 m according to IHO S-67 sample. Accuracy of Global Positioning System (GPS) can be even better; as modern GPS receivers have been achieving horizontal accuracy of 3 m for 95% of the time [
36]. Navigational area safety allowance considering different circumstances in each area are defined by master’s experience or company SMS. According to the good guidance from chosen shipping companies in the study, safety value of navigational area safety allowance corresponds to 50 m for Harbor and confined waters, 0,5 NM (926 m) for Coastal navigation, and 1 NM (1852 m) for Open Sea area. Vessel’s orientation safety allowance could be calculated by using modified formula for increment of ship’s path due to vessel’s turn [
37]. Formula was modified to reflect the fact that XTL divide a path on two corridors, port and starboard side of the planned route. This value can be determined according to equation:
where
LOA = Length Over All and
α = drift angle. In the following case study, vessel’s orientation safety allowance was calculated for 20° of drift, giving resultant of 48 m. Finally, based on all mentioned safety parameters, a following table as a case study is created for reference ship and used reference depths for different navigational areas (
Table 6).
According to suggested formula, XTL value is strongly affected by the position accuracy of bathymetric data. Results obtained for ZOC A1, A2 and B are very similar to values suggested by shipping company “A” and also in specific research [
30] for Coastal/Open sea part. However, the results for ZOC C and D are well above comparable values in previous researches and ECDIS procedures by shipping companies. This is especially important considering previously noted accidents that happened while passing area well known by low confidence of survey data. Such differences of the XTL value in poorly surveyed area can make difference in safe passage of vessel or its grounding. Furthermore, the calculated XTL value in this research paper is acceptable from practical point of view. Consequently, its usage will not evoke numerous alarms and discourage navigator to use adequate setting.
Furthermore, precise XTL determination could be very significant for Vessel Traffic Services in maritime traffic monitoring for timely warning in case of impending danger. In [
38], the decision support system is developed for route exchange. The exchange route segments should also take into consideration the suggested formula for XTL determination value for each vessel.
Safety of navigation must be priority in passage planning, considering all accessible information and identifying all hazards on navigational venture. Notably, value of the XTL is very dynamic, frequently changing as vessel is passing through more or less congested waters depending on reliability of the survey data. By recognizing that fact, in cases where there is more than one CATZOC category on the voyage leg, the one with the worst position accuracy should be chosen as relevant for the XTL determination. Other option is to split voyage leg in more segments by inserting additional waypoints at transition from one ZOC to another.
6. Conclusions
The implementation of new tools on board requires new skills and knowledge from the navigator. The XTL is designed as the basic safety tool in passage planning. Its role is to increase safety of navigation, by scanning the route during route validation process, and ensure choice of optimal route with regards to navigational hazards. That target can be achieved only when safety parameters are properly defined by the end user. Incorrectly defined parameters can lead to unwanted events such as grounding.
After having analyzed shipping companies’ practice, the guidance for the XTL determination differs and are not precise. This allows different and possible incorrect interpretations by the navigator. Such a wrong interpretation of safety parameter setting had caused grounding accident, which was presented in chapter containing previous researches. The importance of CATZOC data study prior and during passage planning process is stressed as critical factor. Charts covering many parts of the world contain survey data that are old and, in some cases, unreliable. Errors caused by unreliable survey data are significant and must be considered. Using previous studies and common practice by shipping companies, the equation for the XTL determination in the ECDIS system for particular size of vessel is suggested in this paper. Integration of suggested equation in passage planning process has an ability to increase safety on navigation, as paramount target. Finally, the objective of this paper is to increase the awareness of ECDIS users with regards to position accuracy of navigational charts and its effect to navigational tools, especially the XTL. It is sometimes unexpected that information behind modern technology could be from 19th century. Passage planning is complex process where all information relevant to the voyage should be considered in order to perform safe voyage plan. Use of ZOC system provides additional information to the user and increase safety awareness during passage planning and execution of passage as well in order to avoid collision.
The actual setting of the XTL by experienced navigators represents material for future research, in order to analyze established routine among seafarers. A detailed understanding of navigators’ interpretation of safety parameters, has a potential to change and improve educational process.








{kind=link}
{kind=link}
{kind=link}





