
A Novel Ship Collision Avoidance Awareness Approach for Cooperating Ships Using Multi-Agent Deep Reinforcement Learning




Abstract
:1. Introduction
2. Literature Review
2.1. Ship Collision Avoidance Methods
2.2. Multi-Agent Deep Reinforcement Learning (MADRL)
2.3. Literature Summary
3. A Proposed Approach
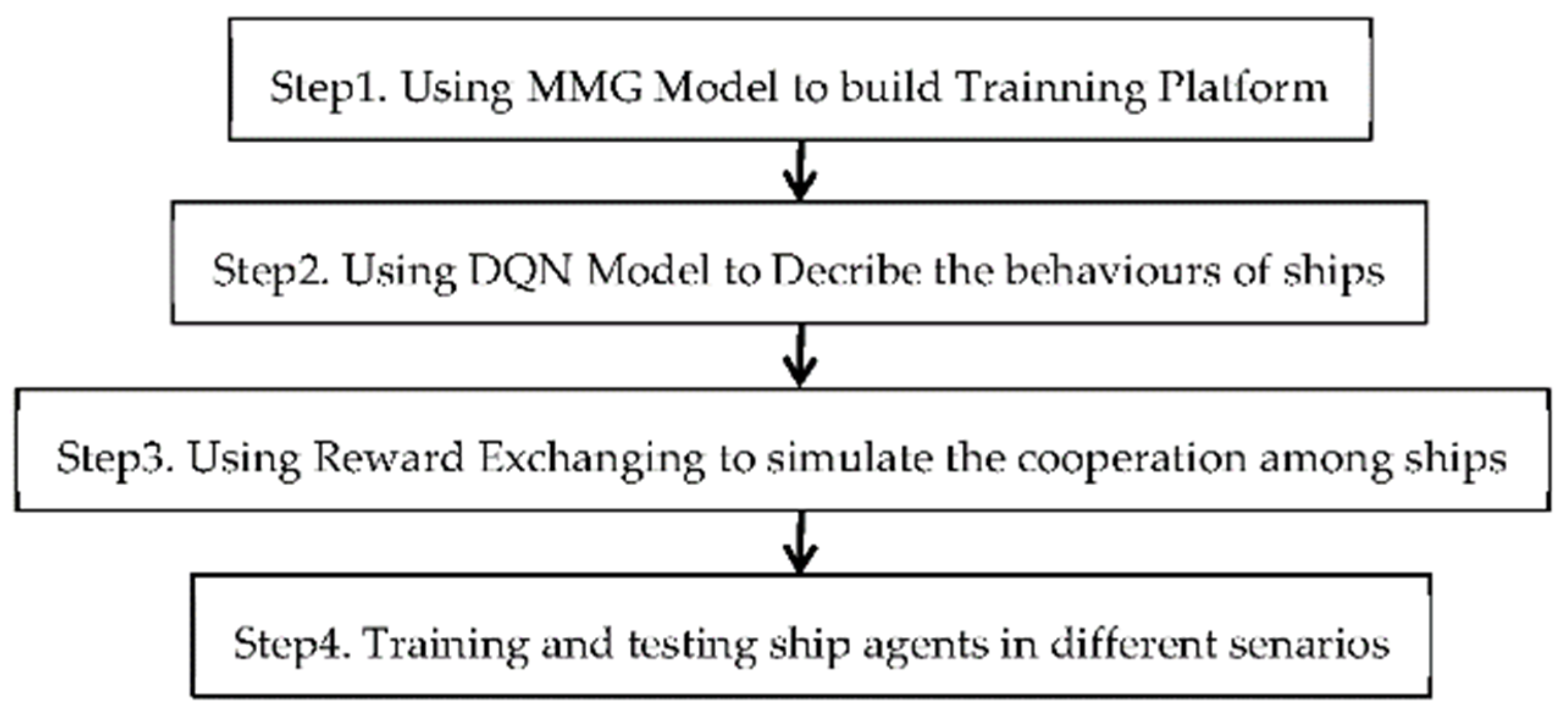
3.1. Flow Chart
3.2. Mathematical Modeling of Ship Motions
3.3. Markov Decision Process of Multi-Ship Cooperative Collision Avoidance
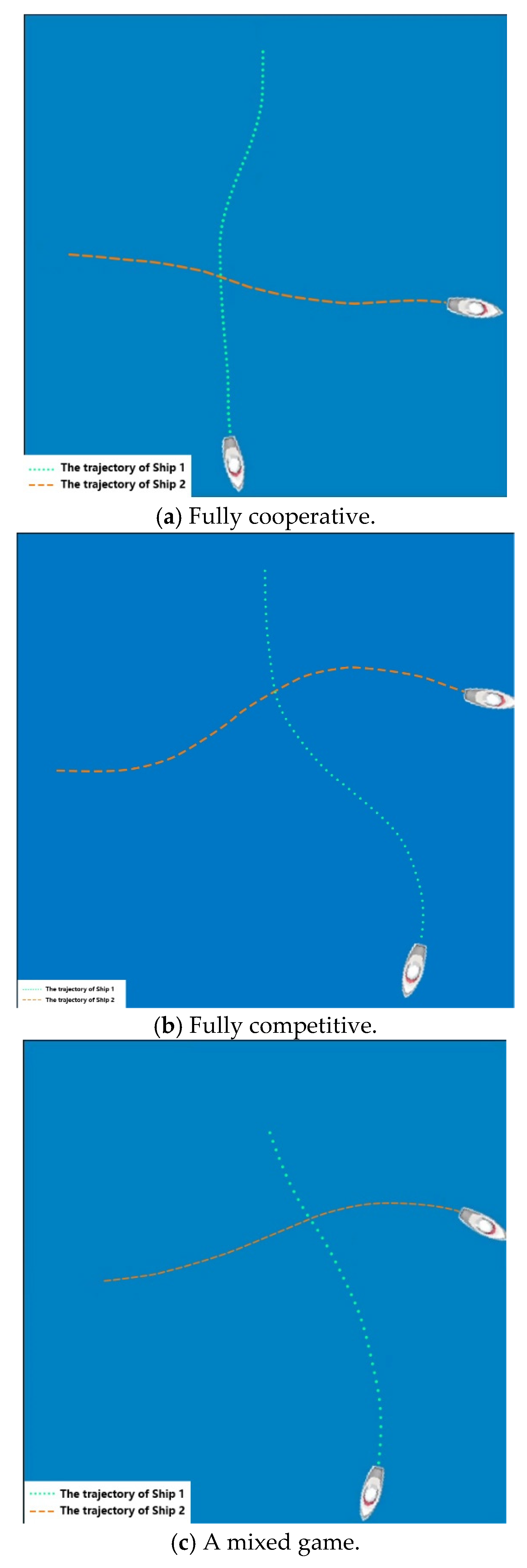
3.4. Different Cooperative Relationships Between Ship Agents
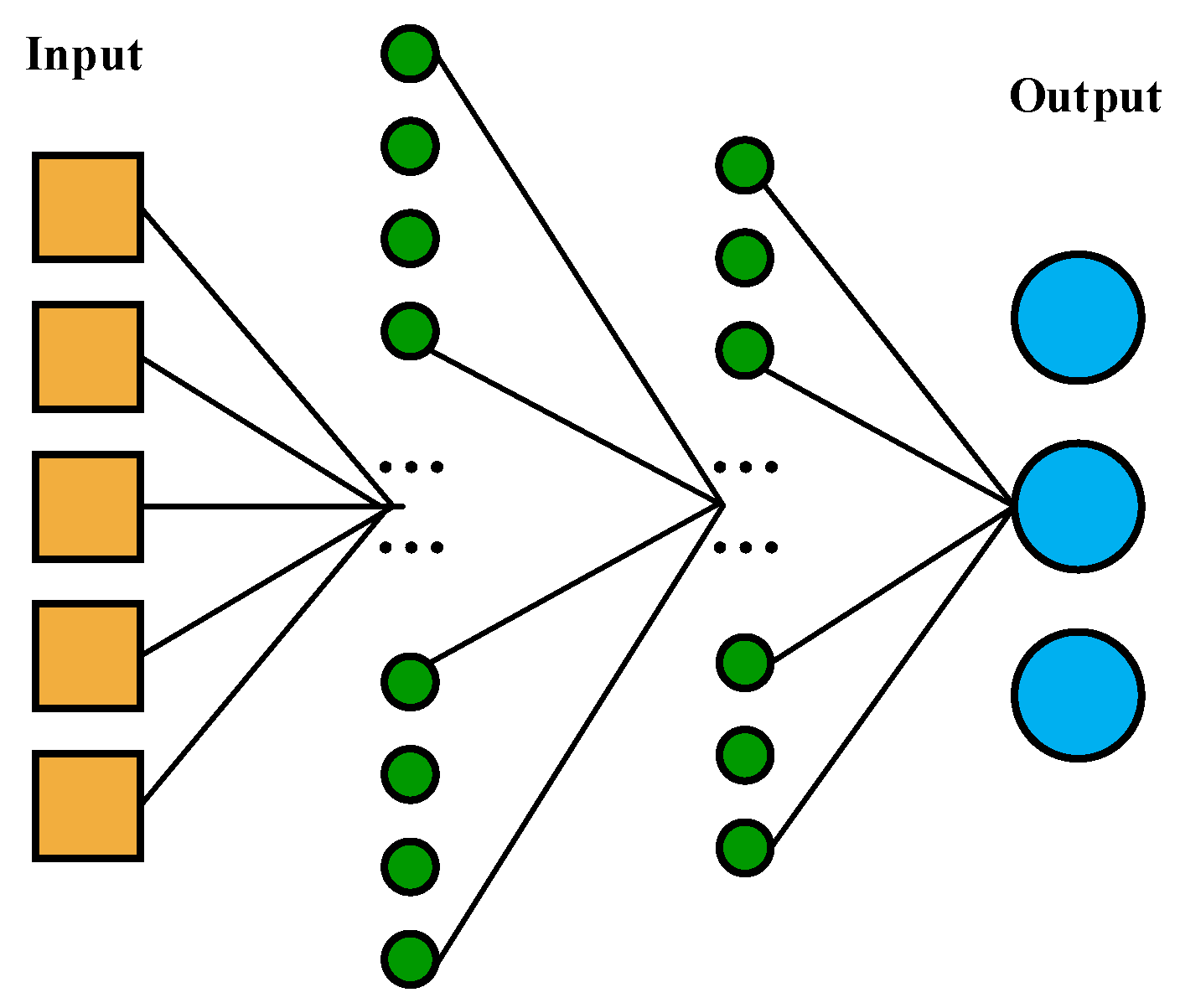
3.5. The Network Structure of a Multi-Ship Cooperative System
4. A Case Study and Validation
4.1. Experimental Platform
4.2. Training in Different Scenarios
4.2.1. Head-On
4.2.2. Overtaking
4.2.3. Crossing
5. Conclusions
- (1)
- The testing scenarios should be expanded with static obstacles, wind and currents being taken into consideration.
- (2)
- The action spaces of ships should include different engine speeds.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AI | Artificial intelligence |
| RL | Reinforcement Learning |
| DRL | Deep Reinforcement Learning |
| MADRL | Multi-agent Deep Reinforcement Learning |
| DQN | Deep Q-Network |
| COLREGs | International Regulations for Preventing Collisions at Sea |
| MASS | Maritime Autonomous Surface ships |
| USV | Unmanned Surface Vessel |
| MSC | Maritime Safety Committee |
| IMO | International Maritime Organization |
| TCPA | Time to the Closest Point of Approach |
| DCPA | Distance to the Closest Point of Approach |
| APF | Artificial Potential Field |
| DCOP | Distributed Constraint Optimization |
| MMG | Mathematical Model Group |
References
- Pasha, J.; Dulebenets, M.A.; Kavoosi, M.; Abioye, O.F.; Theophilus, O.; Wang, H.; Kampmann, R.; Guo, W. Holistic tactical-level planning in liner shipping: An exact optimization approach. J. Shipp. Trade 2020, 5, 8. [Google Scholar] [CrossRef]
- Bagoulla, C.; Guillotreau, P. Maritime transport in the French economy and its impact on air pollution: An input-output analysis. Mar. Policy 2020, 116, 103818. [Google Scholar] [CrossRef]
- Dulebenets, M.A. A comprehensive multi-objective optimization model for the vessel scheduling problem in liner shipping. Int. J. Prod. Econ. 2018, 196, 293–318. [Google Scholar] [CrossRef]
- Dui, H.; Zheng, X.; Wu, S. Resilience analysis of maritime transportation systems based on importance measures. Reliab. Eng. Syst. Saf. 2021, 209, 107461. [Google Scholar] [CrossRef]
- Wang, L.; Wu, Q.; Liu, J.; Li, S.; Negenborn, R.R. State-of-the-Art Research on Motion Control of Maritime Autonomous Surface Ships. J. Mar. Sci. Eng. 2019, 7, 438. [Google Scholar] [CrossRef] [Green Version]
- Szlapczynski, R.; Szłapczyńska, J. An analysis of domain-based ship collision risk parameters. Ocean. Eng. 2016, 126, 47–56. [Google Scholar] [CrossRef]
- Denker, C.; Baldauf, M.; Fischer, S.; Hahn, A.; Ziebold, R.; Gehrmann, E.; Semann, M. e-Navigation based cooperative collision avoidance at sea: The MTCAS approach. In Proceedings of the 2016 European Navigation Conference (ENC), Helsinki, Finland, 30 May–2 June 2016; pp. 1–8. [Google Scholar]
- Blaich, M.; Kohler, S.; Schuster, M.; Schuchhardt, T.; Reuter, J.; Tietz, T. Mission integrated collision avoidance for USVs using laser range finder. In Proceedings of the OCEANS 2015-Genova, Genova, Italy, 18–21 May 2015; Volume 2015, pp. 1–6. [Google Scholar]
- Chen, J.; Pan, W.; Guo, Y.; Huang, C.; Wu, H. An obstacle avoidance algorithm designed for USV based on single beam sonar and fuzzy control. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; Volume 12, pp. 2446–2451. [Google Scholar]
- Eriksen, B.-O.H.; Wilthil, E.F.; Flaten, A.L.; Brekke, E.F.; Breivik, M. Radar-based maritime collision avoidance using dynamic window. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; Volume 3, pp. 1–9. [Google Scholar] [CrossRef]
- Van Der Sande, T.; Nijmeijer, H. From Cooperative to Autonomous Vehicles. Lect. Notes Control. Inf. Sci. 2017, 474, 435–452. [Google Scholar] [CrossRef]
- Wang, Z.; Xiang, X.; Yang, J.; Yang, S. Composite Astar and B-spline algorithm for path planning of autonomous underwater vehicle. In Proceedings of the 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications (USYS), Kuala Lumpur, Malaysia, 18–20 December 2017; Volume 2017, pp. 1–6. [Google Scholar]
- Lazarowska, A. A New Potential Field Inspired Path Planning Algorithm for Ships. In Proceedings of the 2018 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2018; Volume 2018, pp. 166–170. [Google Scholar]
- Borkowski, P.; Pietrzykowski, Z.; Magaj, J. The Algorithm of Determining an Anti-Collision Manoeuvre Trajectory Based on the Interpolation of Ship’s State Vector. Sensors 2021, 21, 5332. [Google Scholar] [CrossRef]
- Song, C.H. Global Path Planning Method for USV System Based on Improved Ant Colony Algorithm. Appl. Mech. Mater. 2014, 568–570, 785–788. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, W.; Shi, P. A real-time collision avoidance learning system for Unmanned Surface Vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Szymak, P.; Praczyk, T. Using neural-evolutionary-fuzzy algorithm for anti-collision system of Unmanned Surface Vehicle. In Proceedings of the 2012 17th International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2012; Volume 2012, pp. 286–290. [Google Scholar]
- Praczyk, T. Neural anti-collision system for Autonomous Surface Vehicle. Neurocomputing 2015, 149, 559–572. [Google Scholar] [CrossRef]
- Chen, C.; Chen, X.-Q.; Ma, F.; Zeng, X.-J.; Wang, J. A knowledge-free path planning approach for smart ships based on reinforcement learning. Ocean. Eng. 2019, 189, 106299. [Google Scholar] [CrossRef]
- Zhao, L.; Roh, M.-I. COLREGs-compliant multiship collision avoidance based on deep reinforcement learning. Ocean. Eng. 2019, 191. [Google Scholar] [CrossRef]
- Chen, C.; Ma, F.; Liu, J.; Negenborn, R.R.; Liu, Y.; Yan, X. Controlling a cargo ship without human experience using deep Q-network. J. Intell. Fuzzy Syst. 2020, 39, 7363–7379. [Google Scholar] [CrossRef]
- Leite, A.R.; Enembreck, F.; Barthès, J.-P.A. Distributed Constraint Optimization Problems: Review and perspectives. Expert Syst. Appl. 2014, 41, 5139–5157. [Google Scholar] [CrossRef]
- Li, S.; Liu, J.; Negenborn, R.R. Distributed coordination for collision avoidance of multiple ships considering ship maneuverability. Ocean. Eng. 2019, 181, 212–226. [Google Scholar] [CrossRef]
- Lisowski, J. Synthesis of a Path-Planning Algorithm for Autonomous Robots Moving in a Game Environment during Collision Avoidance. Electronics 2021, 10, 675. [Google Scholar] [CrossRef]
- Zhou, B.; Liao, X.; Huang, T.; Chen, G. Leader-following exponential consensus of general linear multi-agent systems via event-triggered control with combinational measurements. Appl. Math. Lett. 2015, 40, 35–39. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, G.; Lu, Y.; Zhang, W. Leader-follower formation control of underactuated surface vehicles based on sliding mode control and parameter estimation. ISA Trans. 2018, 72, 15–24. [Google Scholar] [CrossRef]
- Wang, S.; Ma, F.; Yan, X.; Wu, P.; Liu, Y. Adaptive and extendable control of unmanned surface vehicle formations using distributed deep reinforcement learning. Appl. Ocean. Res. 2021, 110, 102590. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, P.; Zhang, H.; Guo, W.; Liu, Y. Learn to Navigate: Cooperative Path Planning for Unmanned Surface Vehicles Using Deep Reinforcement Learning. IEEE Access 2019, 7, 165262–165278. [Google Scholar] [CrossRef]
- Foerster, J.N.; Assael, Y.M.; de Freitas, N.; Whiteson, S. Learning to Communicate with Deep Multi-Agent Reinforcement Learning. In Proceedings of the 30th Conference on Neural Information Processing Systems (NIPS), Barcelona, Spain, 5–10 December 2016. [Google Scholar]
- Tan, M. Multi-Agent Reinforcement Learning: Independent vs. Cooperative Agents. In Proceedings of the Machine Learning Proceedings 1993; Elsevier BV: Amsterdam, The Netherlands, 1993; Volume 1993, pp. 330–337. [Google Scholar]
- Tampuu, A.; Matiisen, T.; Kodelja, D.; Kuzovkin, I.; Korjus, K.; Aru, J.; Aru, J.; Vicente, R. Multiagent cooperation and competition with deep reinforcement learning. PLoS ONE 2017, 12, e0172395. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Jaderberg, M.; Czarnecki, W.M.; Dunning, I.; Marris, L.; Lever, G.; Castañeda, A.G.; Beattie, C.; Rabinowitz, N.C.; Morcos, A.S.; Ruderman, A.; et al. Human-level performance in 3D multiplayer games with population-based reinforcement learning. Science 2019, 364, 859–865. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, J.; Quadvlieg, F.; Hekkenberg, R. Impacts of the rudder profile on manoeuvring performance of ships. Ocean. Eng. 2016, 124, 226–240. [Google Scholar] [CrossRef] [Green Version]
- Mersereau, A.J.; Rusmevichientong, P.; Tsitsiklis, J.N. A structured multiarmed bandit problem and the greedy policy. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; Volume 2008, pp. 4945–4950. [Google Scholar]
- Kelly, S. Python, PyGame, and Raspberry Pi Game Development; Apress: Niagara Falls, ON, Canada, 2019. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cooperative Relationships | ||
|---|---|---|
| 1 | 1 | Fully cooperative |
| 0 | 0 | Fully competitive |
| [0,1] | [0,1] | Mixed game |
| Parameter | Value |
|---|---|
| Learning Rate | 0.0002 |
| Discount Rate | 0.99 |
| Minibatch Size | 128 |
| Replay Memory Size | 20,000 |
| Target Network Update Frequency | 1000 |
| Initial exploration | 1 |
| Attributes | Value |
|---|---|
| Length (m) | 7 |
| Width (m) | 1.17 |
| Draught (m) | 0.46 |
| Block coefficient (-) | 0.81 |
| Propeller revolution per second (1/s) | 10.4 |
| Range of rudder angles (deg) | −35~35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Ma, F.; Xu, X.; Chen, Y.; Wang, J. A Novel Ship Collision Avoidance Awareness Approach for Cooperating Ships Using Multi-Agent Deep Reinforcement Learning. J. Mar. Sci. Eng. 2021, 9, 1056. https://doi.org/10.3390/jmse9101056
Chen C, Ma F, Xu X, Chen Y, Wang J. A Novel Ship Collision Avoidance Awareness Approach for Cooperating Ships Using Multi-Agent Deep Reinforcement Learning. Journal of Marine Science and Engineering. 2021; 9(10):1056. https://doi.org/10.3390/jmse9101056
Chicago/Turabian StyleChen, Chen, Feng Ma, Xiaobin Xu, Yuwang Chen, and Jin Wang. 2021. "A Novel Ship Collision Avoidance Awareness Approach for Cooperating Ships Using Multi-Agent Deep Reinforcement Learning" Journal of Marine Science and Engineering 9, no. 10: 1056. https://doi.org/10.3390/jmse9101056
APA StyleChen, C., Ma, F., Xu, X., Chen, Y., & Wang, J. (2021). A Novel Ship Collision Avoidance Awareness Approach for Cooperating Ships Using Multi-Agent Deep Reinforcement Learning. Journal of Marine Science and Engineering, 9(10), 1056. https://doi.org/10.3390/jmse9101056