
A Coordination System between Decision Making and Controlling for Autonomous Collision Avoidance of Large Intelligent Ships


Abstract
:1. Introduction
2. Literature Review
- The risk avoiding algorithm is proposed based on improved VO (velocity obstacle) algorithm by a series of recursive and predictive steps thus the decision-making module will give a more appropriate decision course. The COLREGS (International Regulations for Preventing Collisions at Sea) is also considered.
- The returning waypoint algorithm is proposed based on improved LOS (Line of Sight) method with the predicted ship status. To solve the large crossing problem, an approaching rate is defined to give criterion to identify the problem.
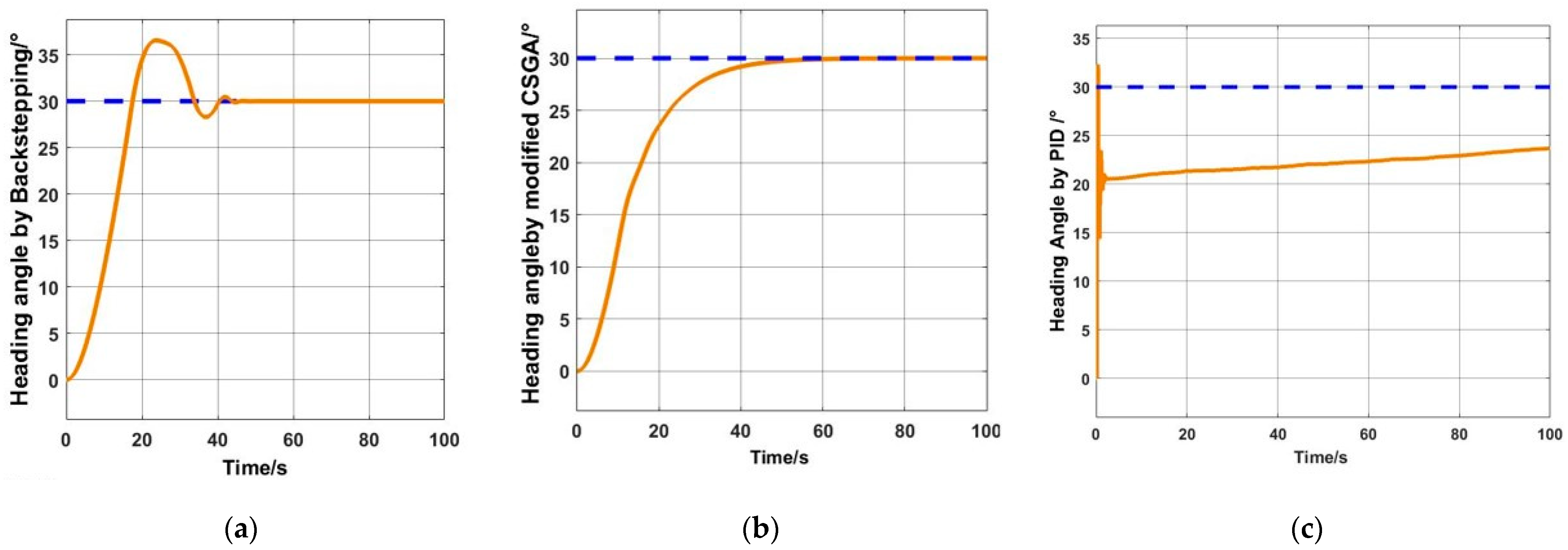
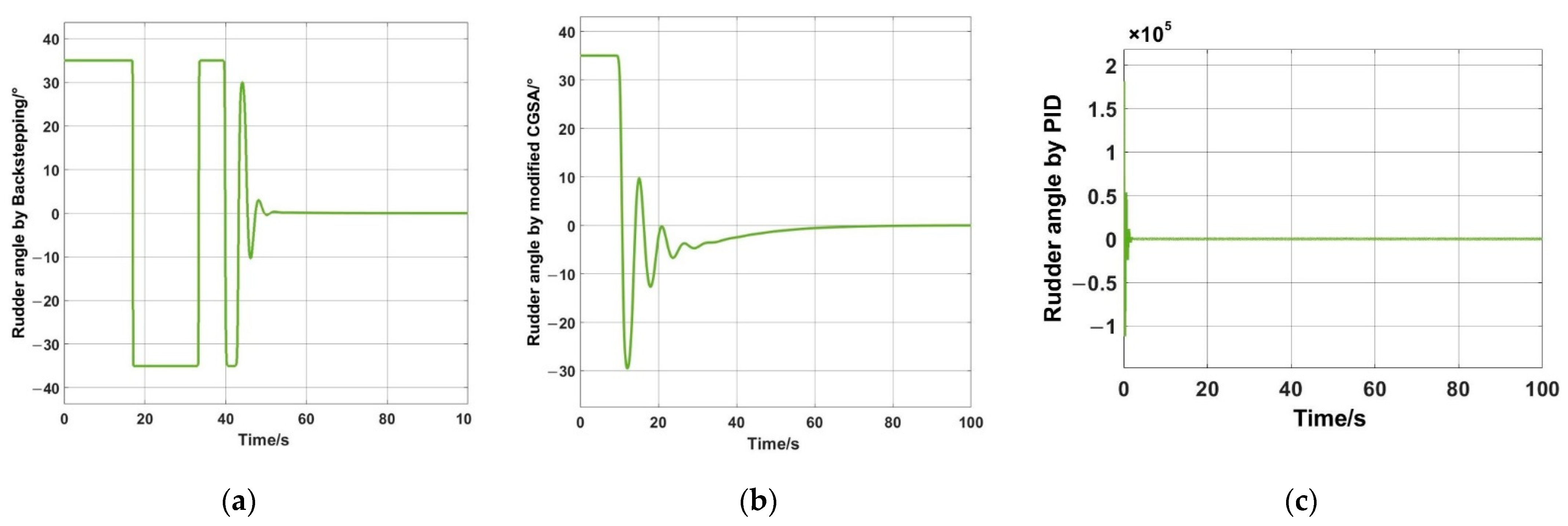
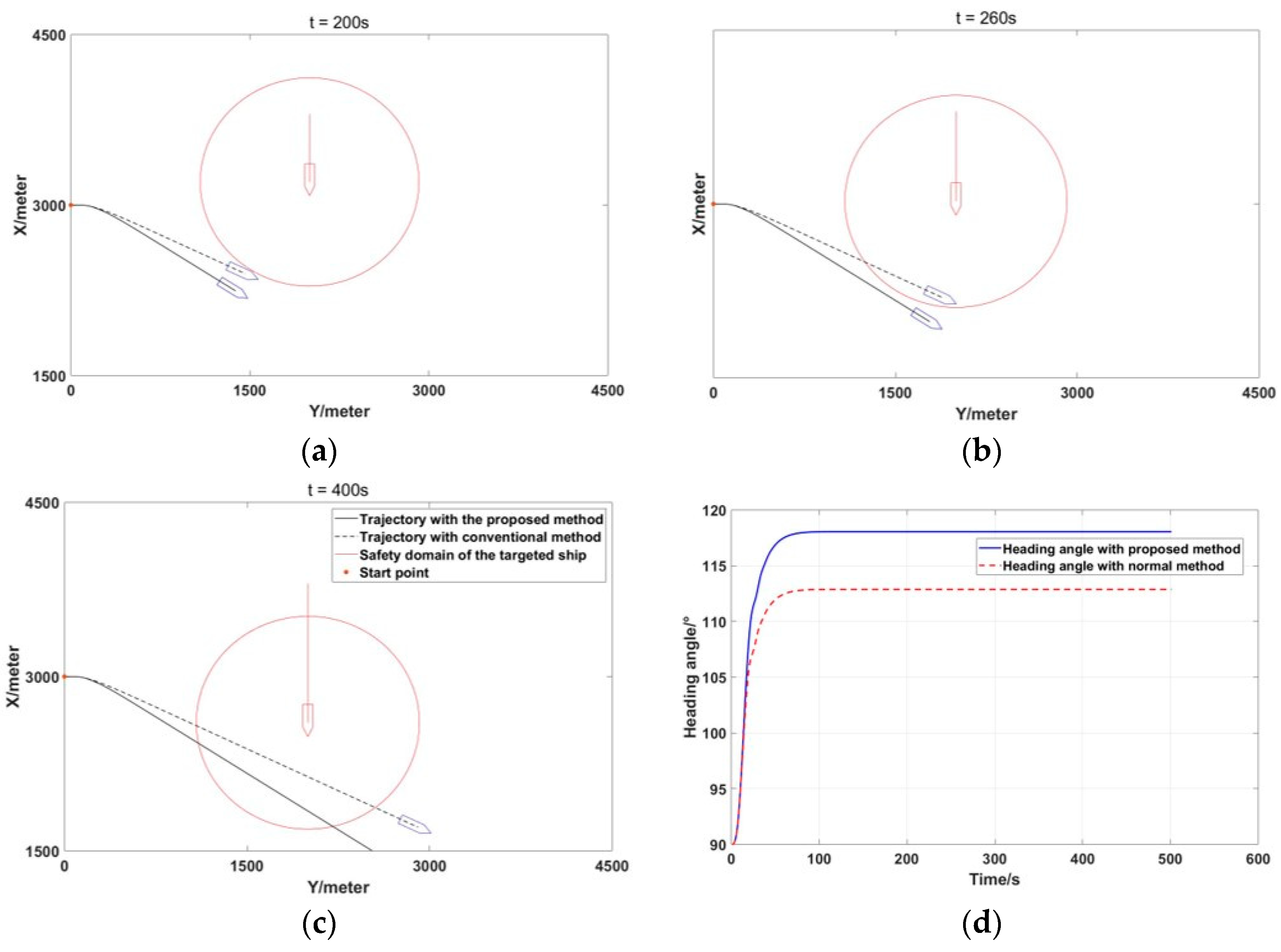
- A more practical controller is applied by CGSA (closed loop gain shaping algorithm) to obtain ship maneuvering time in contrast to traditional ways using simple PID control.
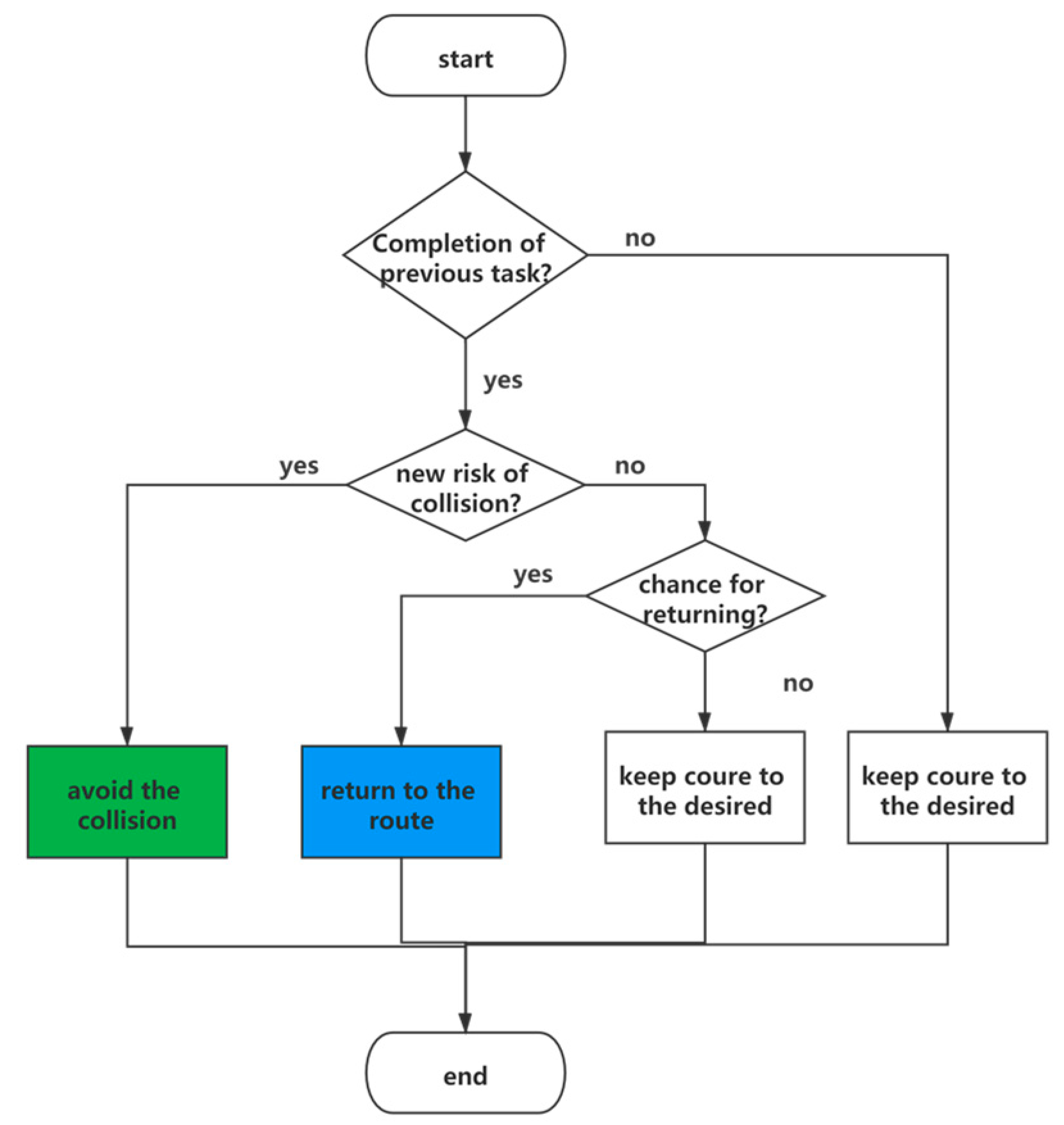
- The collision avoidance and returning functions are combined to a comprehensive system. By shifting among the statuses of avoiding collisions, keeping courses and returning, the own ship will pass the targeted ships outside the boundary of safety domain in a good manner and then return to the next waypoint safely.
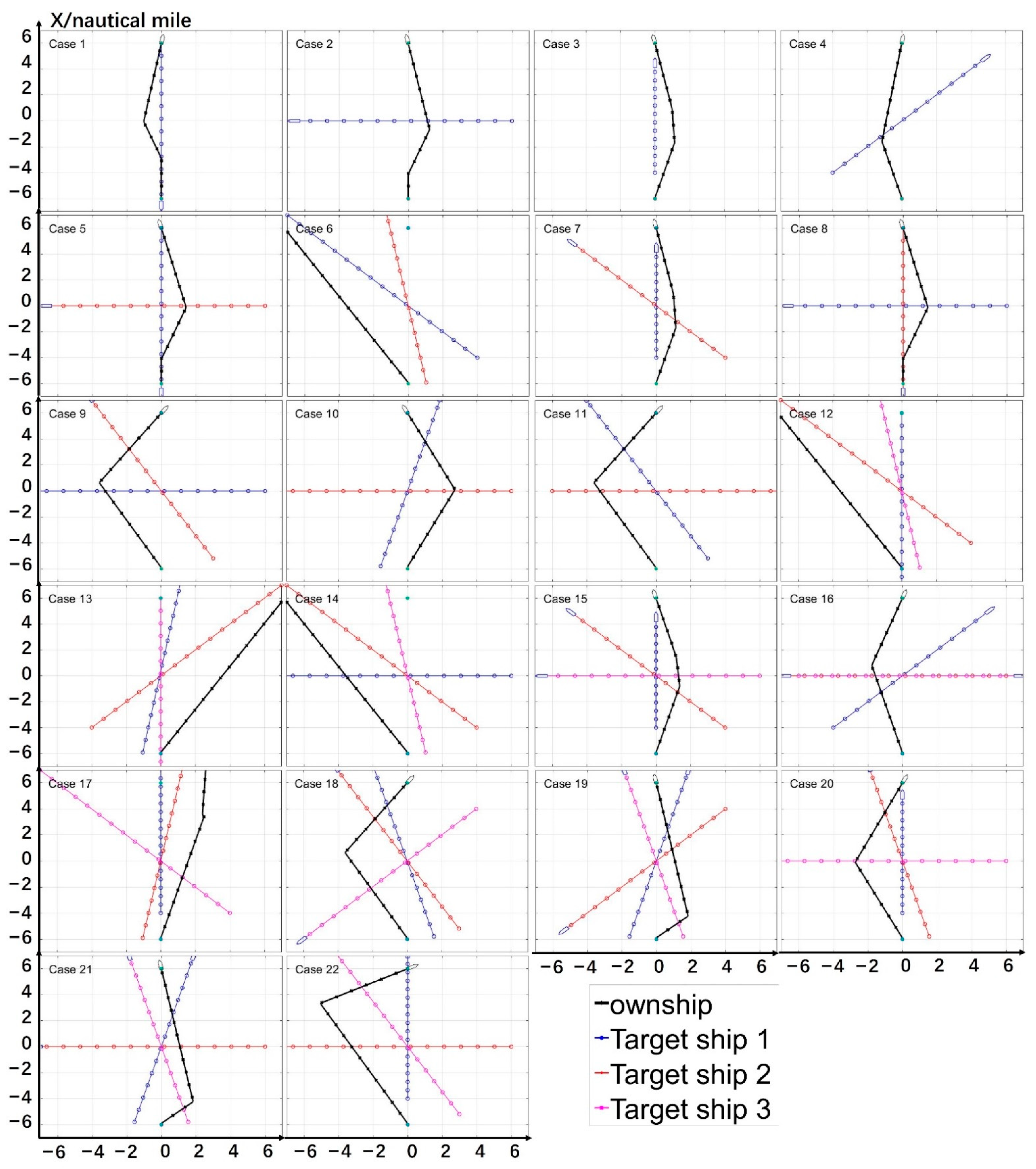
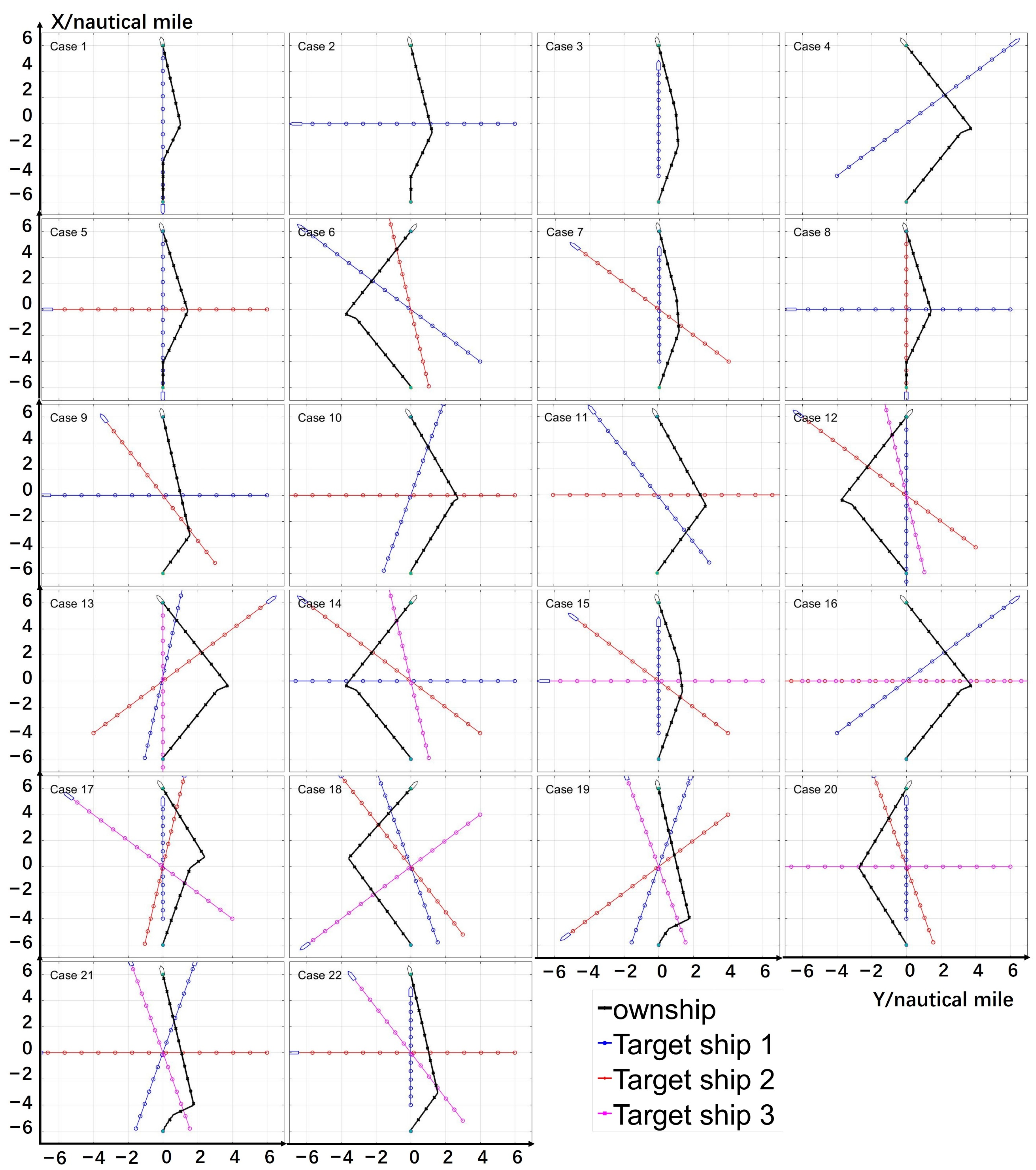
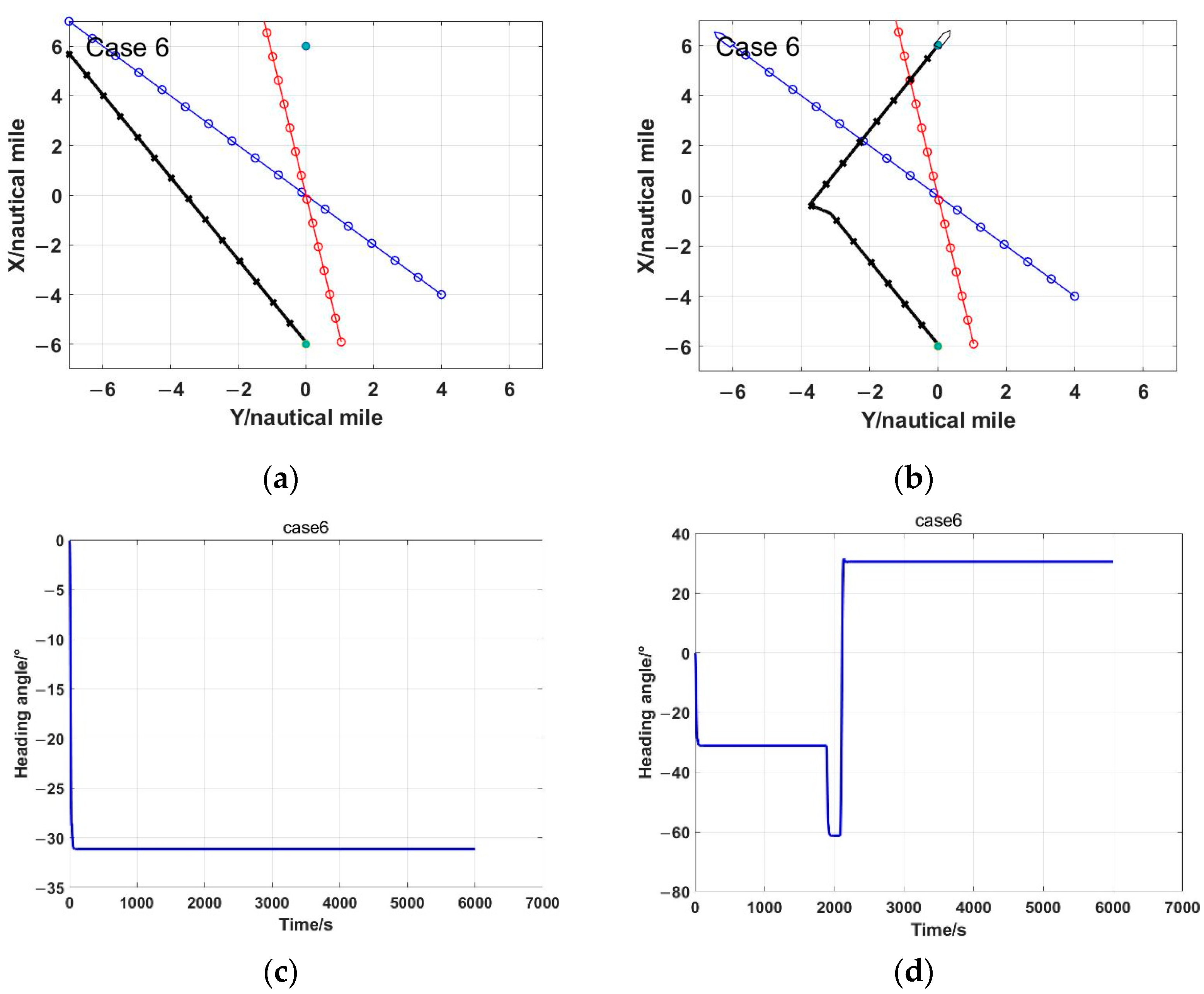
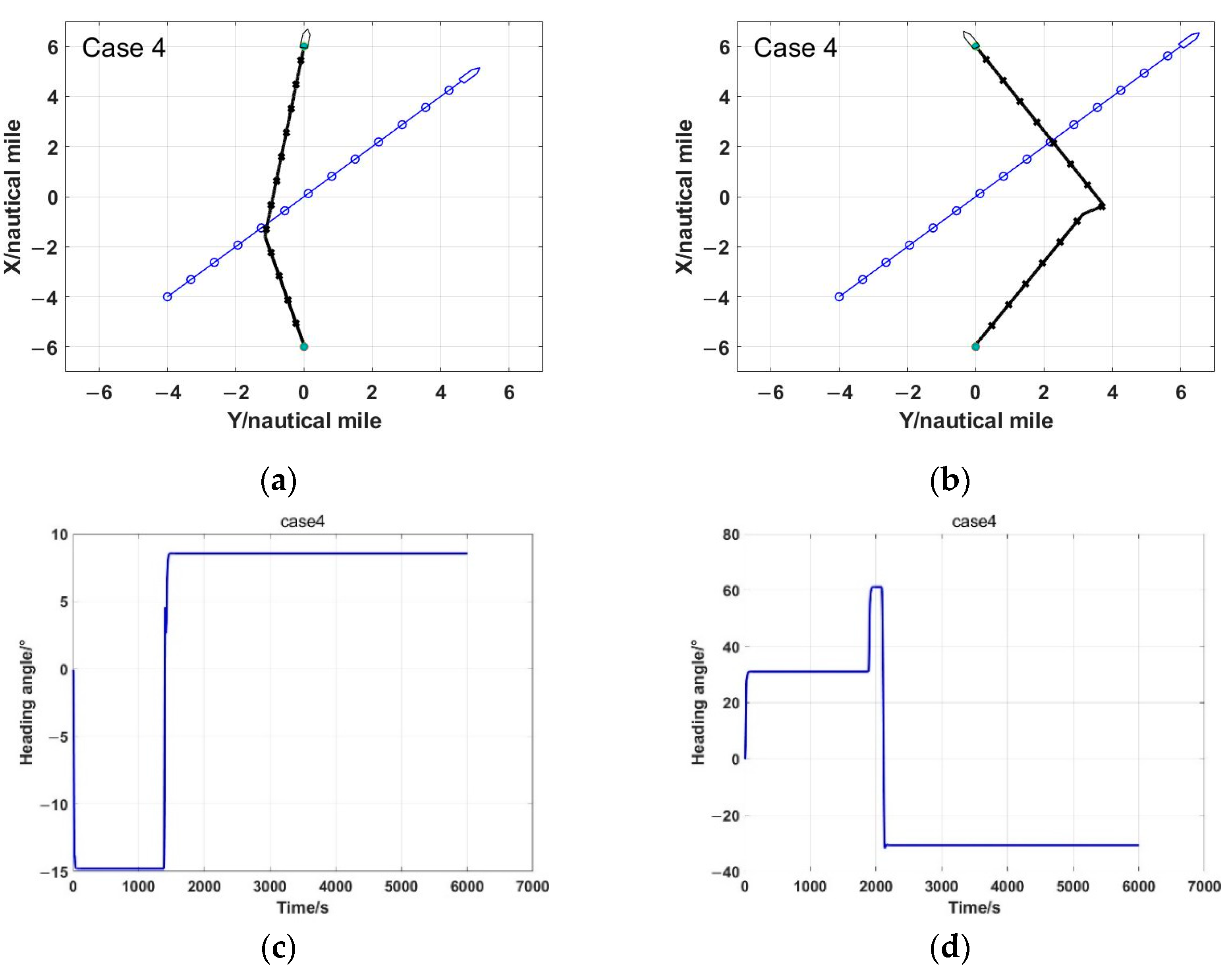
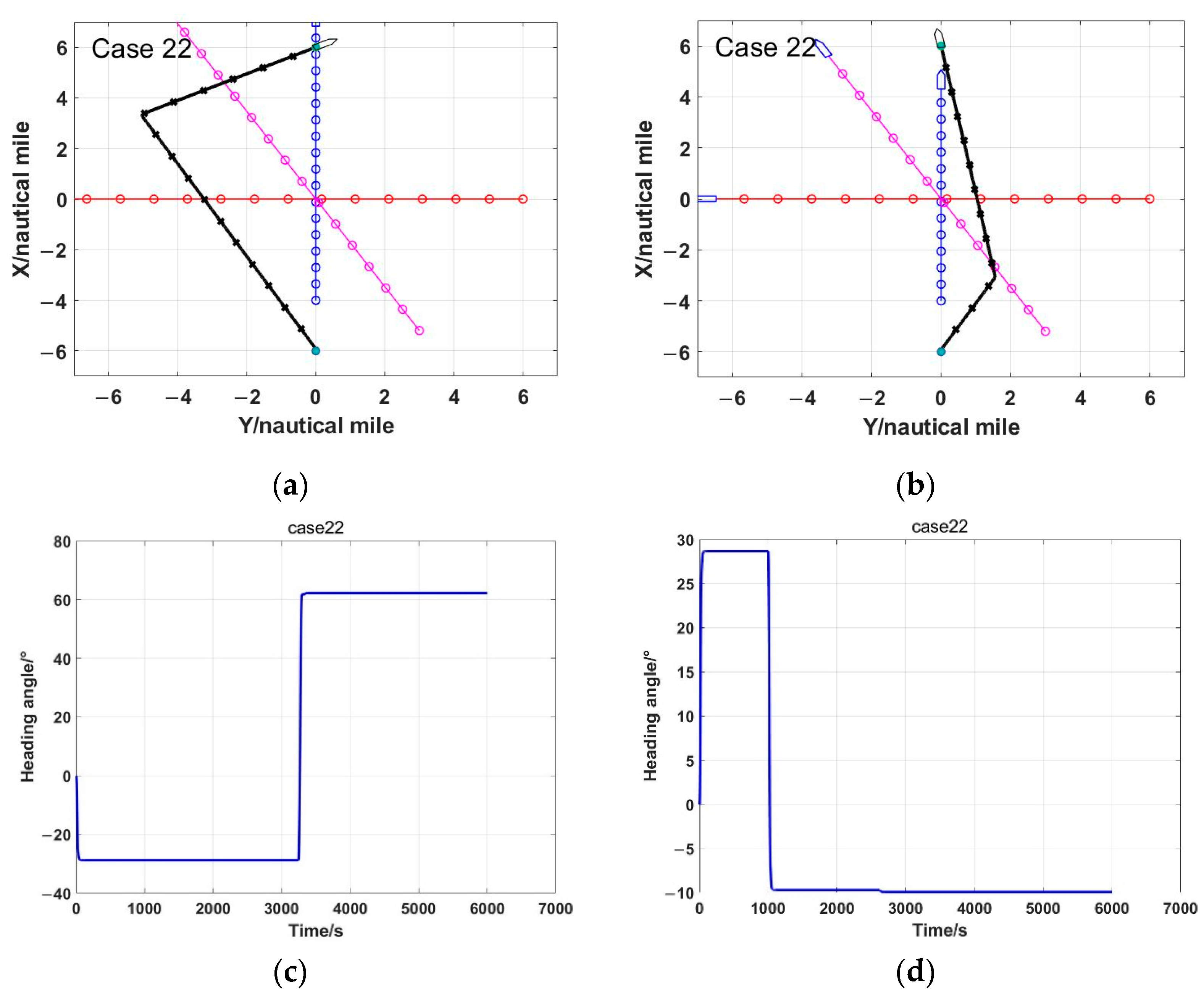
- A series of test experiments are conducted including single static obstacle, single targeted ship and multiple targeted ships. The multiple targeted ship encounters are tested based on Imazu problem of 22 cases, then the final two scenarios include up to 7 targeted ships.
3. Modelling of Maneuverability
3.1. Ship Motion Modelling
3.2. Autopilot Modelling
4. Risk Detection
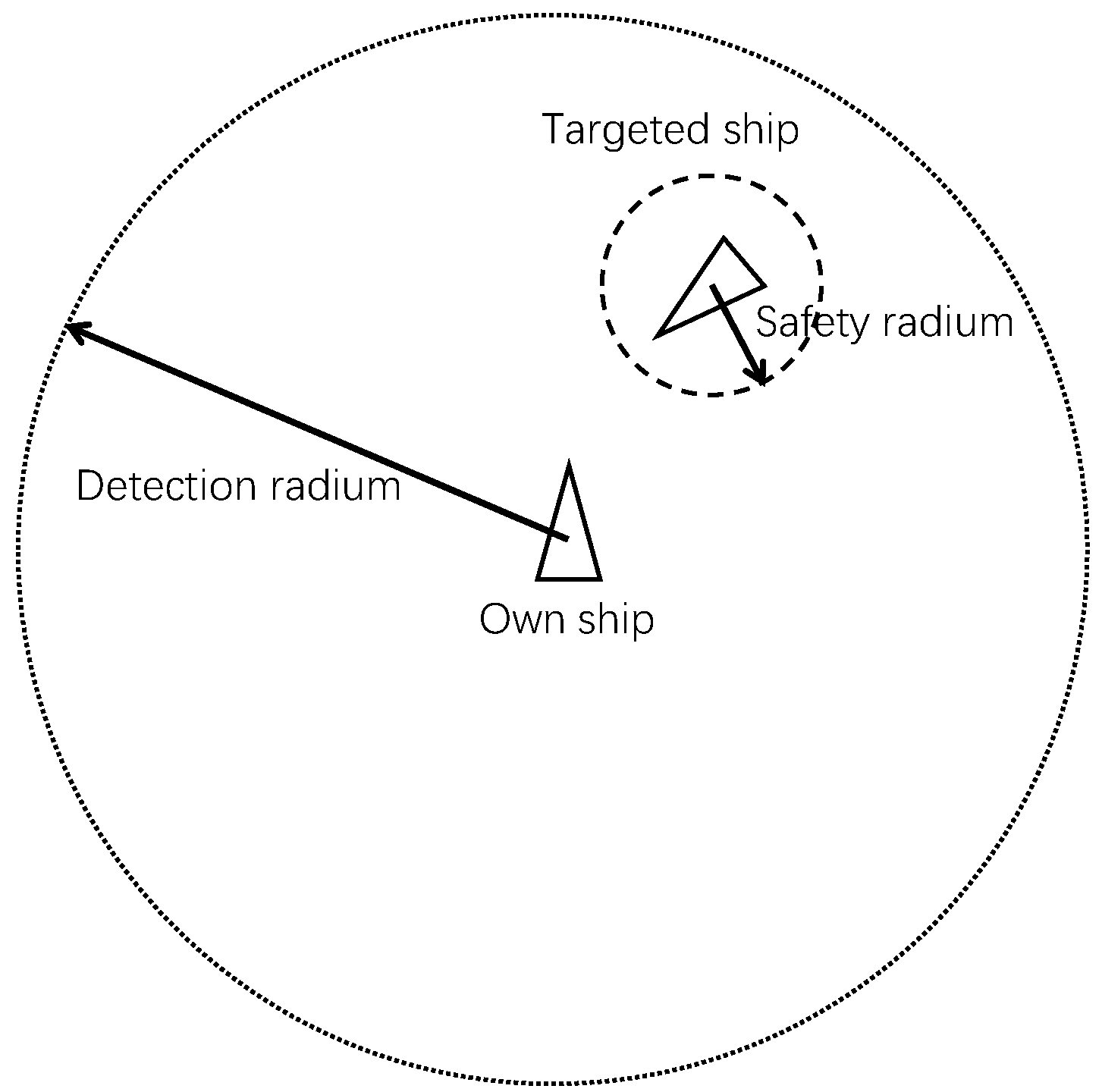
4.1. Detection Ranges
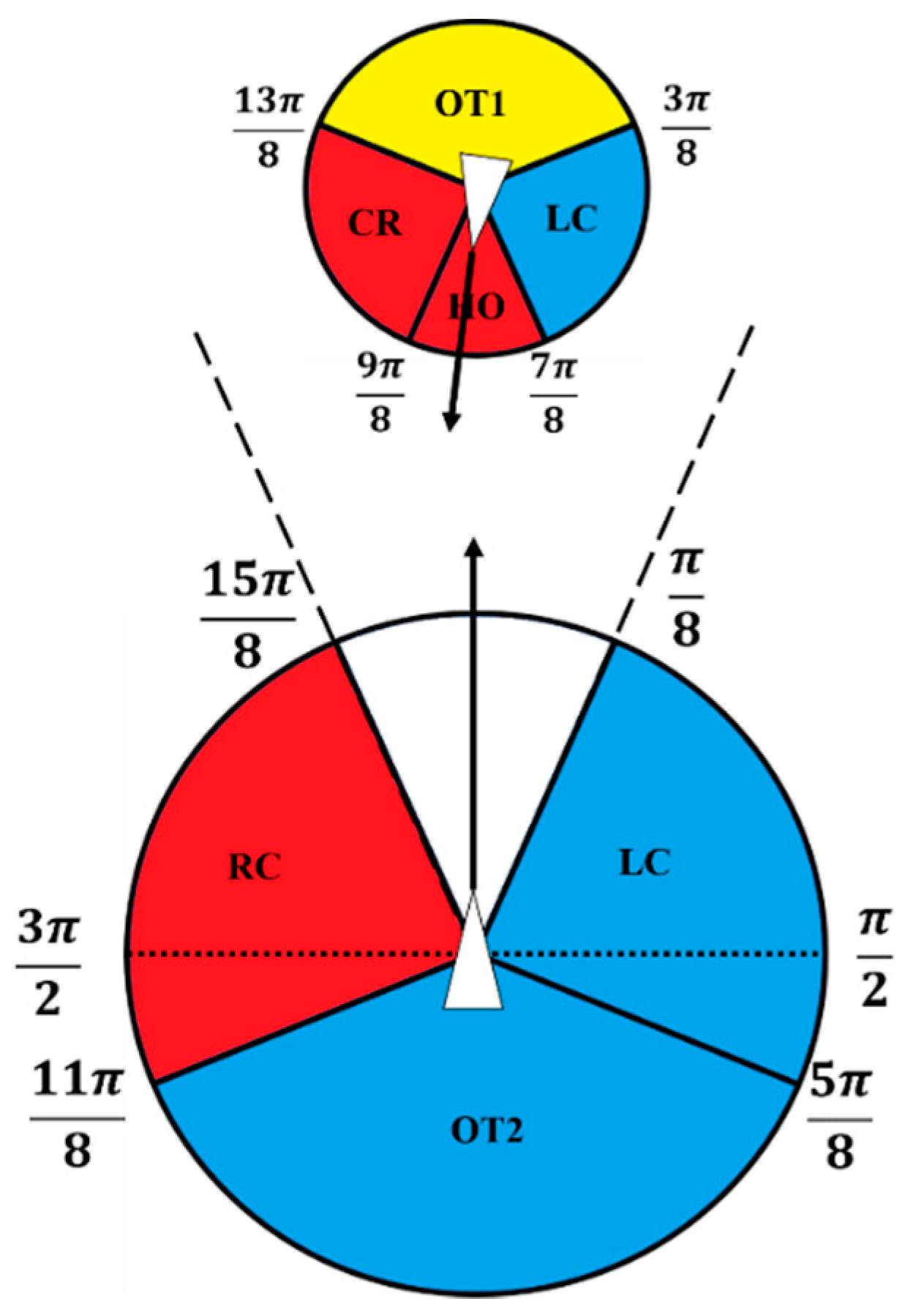
4.2. COLREGS Ruling
5. Coordination System
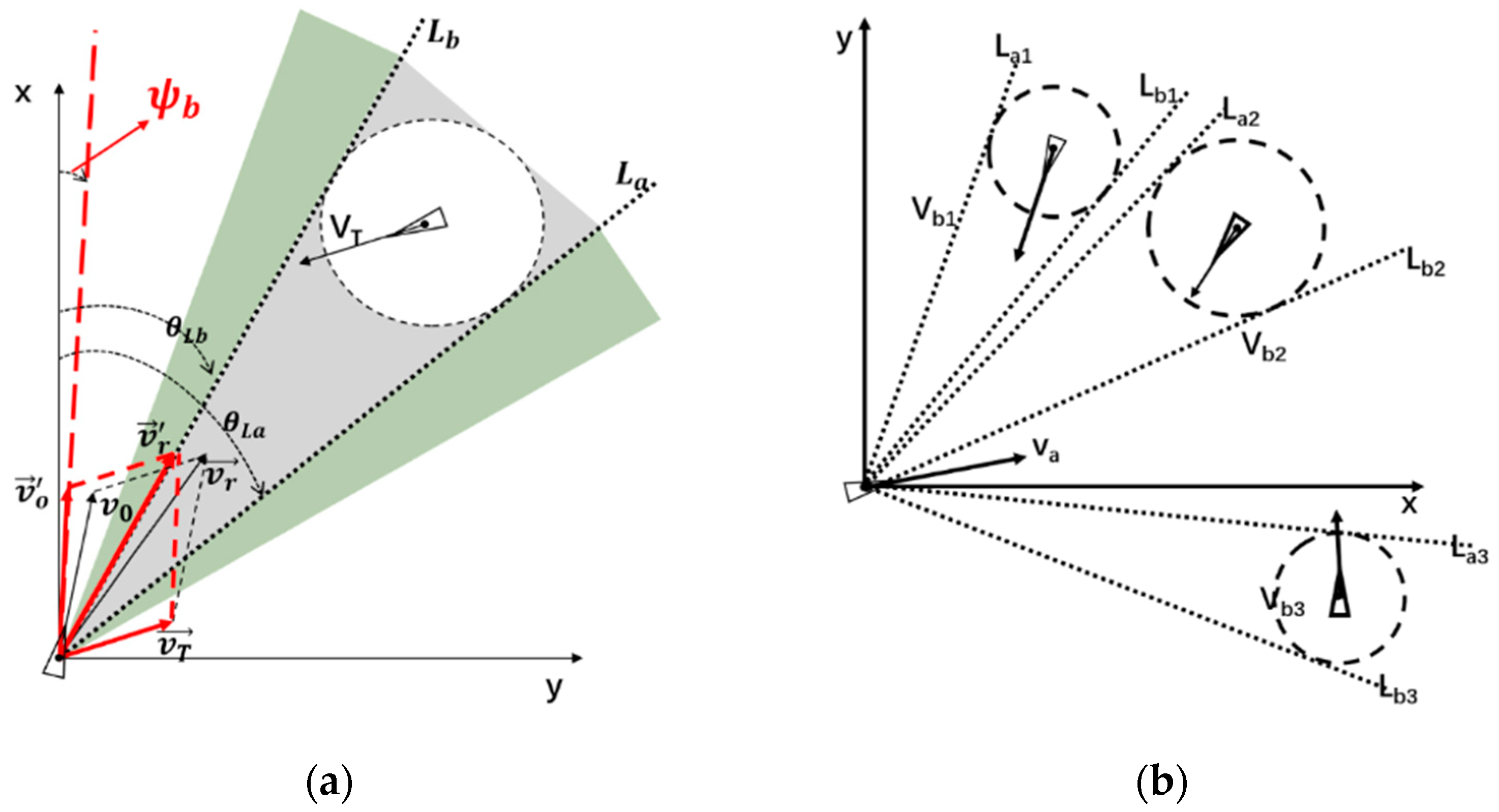
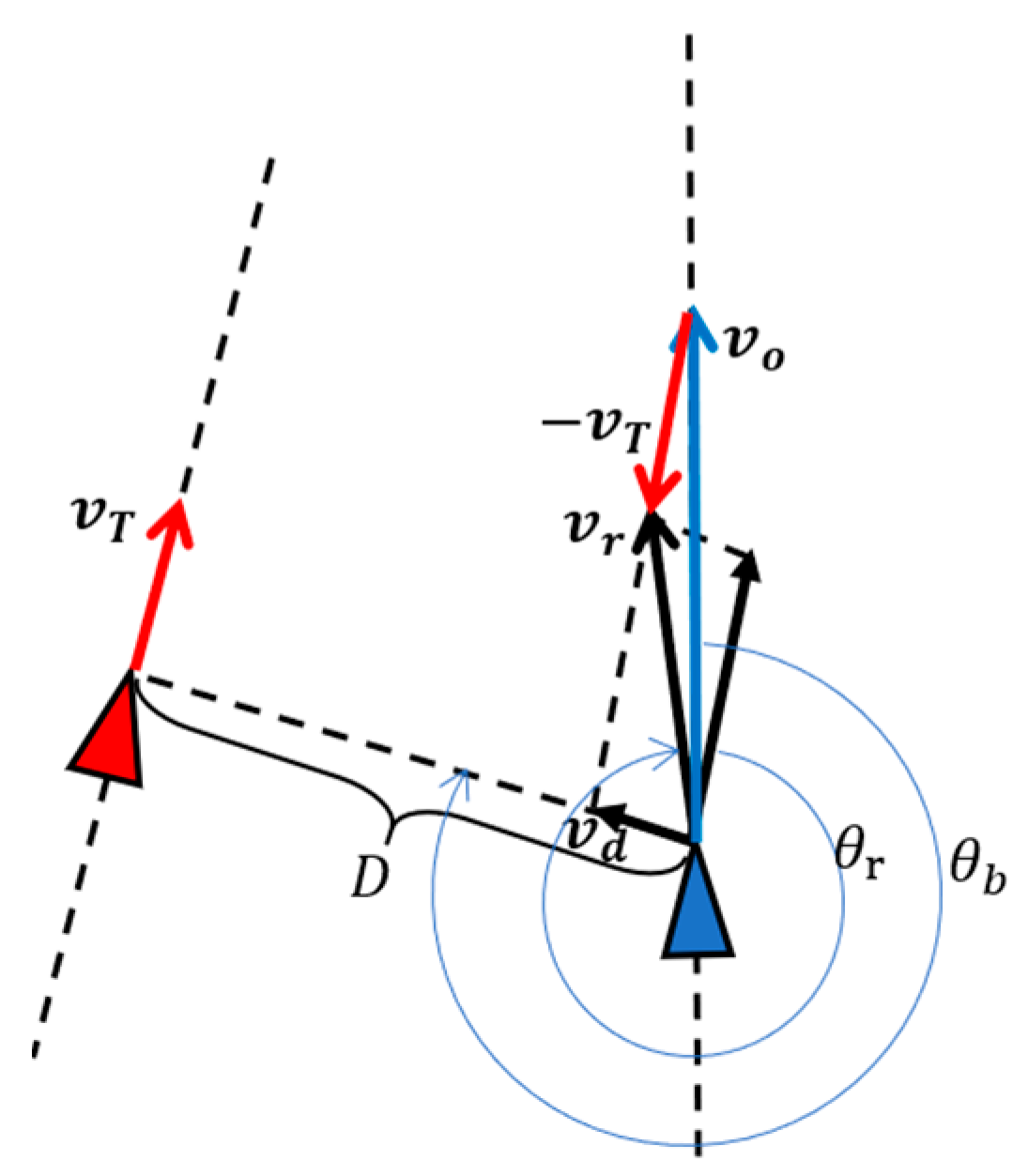
5.1. Basic Principle of VO Algorithm
5.2. Collision Avoiding Algorithm
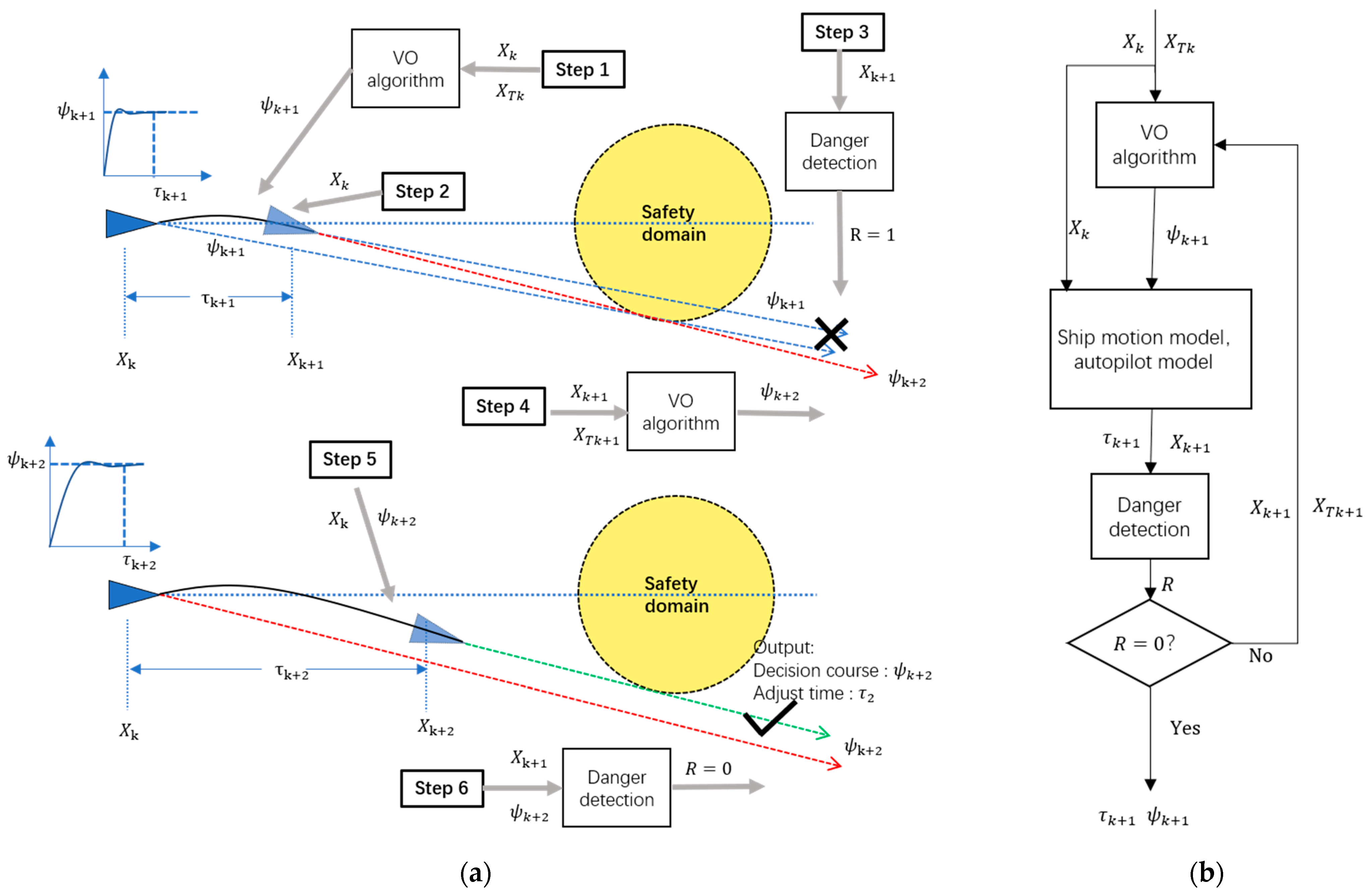
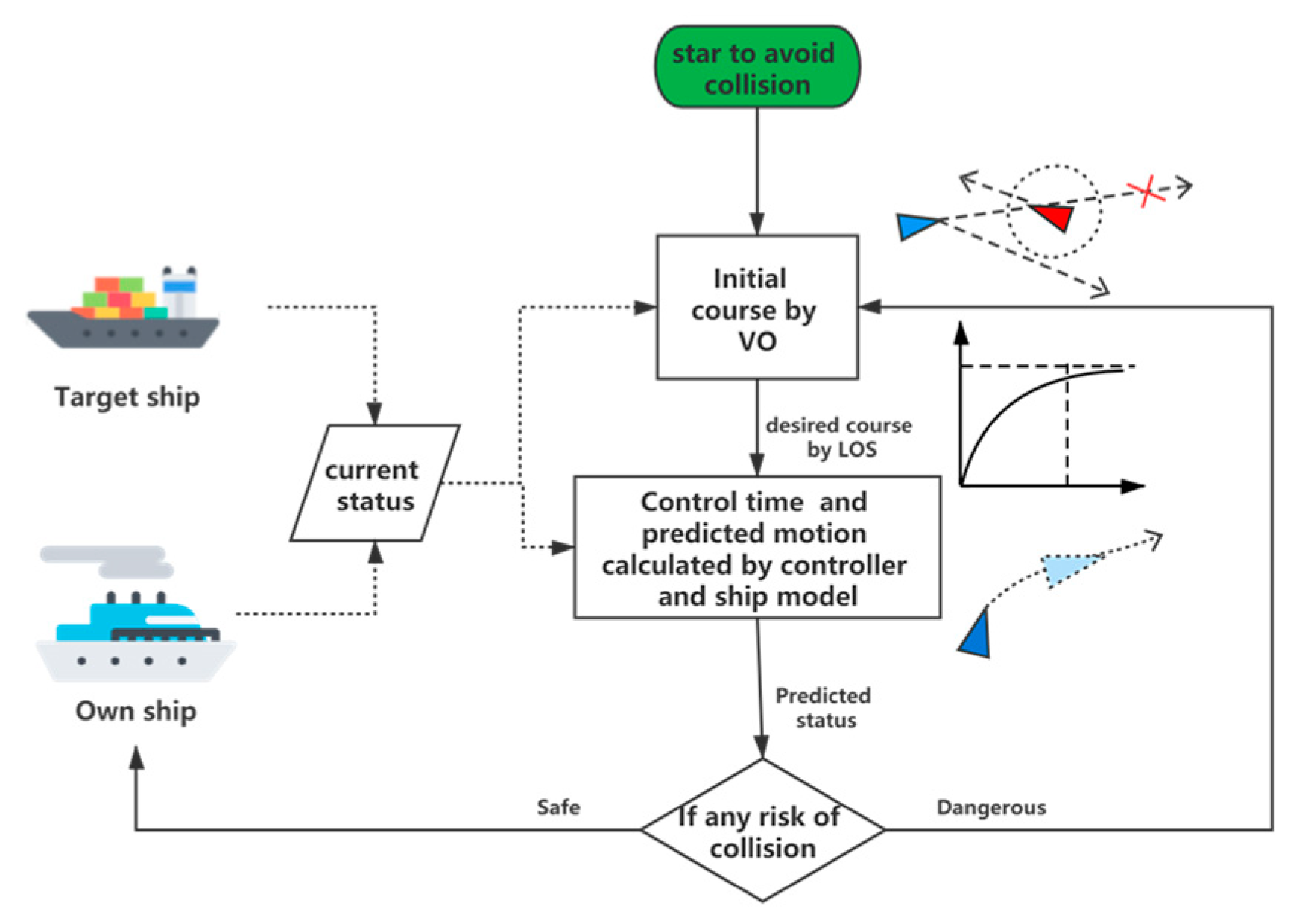
- (Step 1) The simple VO algorithm initially calculates the candidate desired course under current ship status and the targeted ship .
- (Step 2) The controller and the ship model calculate the control parameters and predicted own ship status , is rudder control sequence and is adjusting time of the ship when heading to the desired course .
- (Step 3) The danger detection function () indicates that own ship will be in a danger of collision if gets into the predicted status by following the desired course .
- (Step 4~Step 6) The VO algorithm recalculates a new desired under the predicted own ship status and predicted targeted ship (assuming that the targeted ship steers in a constant speed), the controller and the ship model, on the bases of and , will update the adjusting time and predicted own ship status .
- (Output) According to if the value of the detection function turns to R = 0, the final desired course will be , the adjust time , and the predicted own ship status , otherwise and the collision avoiding algorithm will repeat the steps 1~3.
5.3. Returning to Waypoint Algorithm
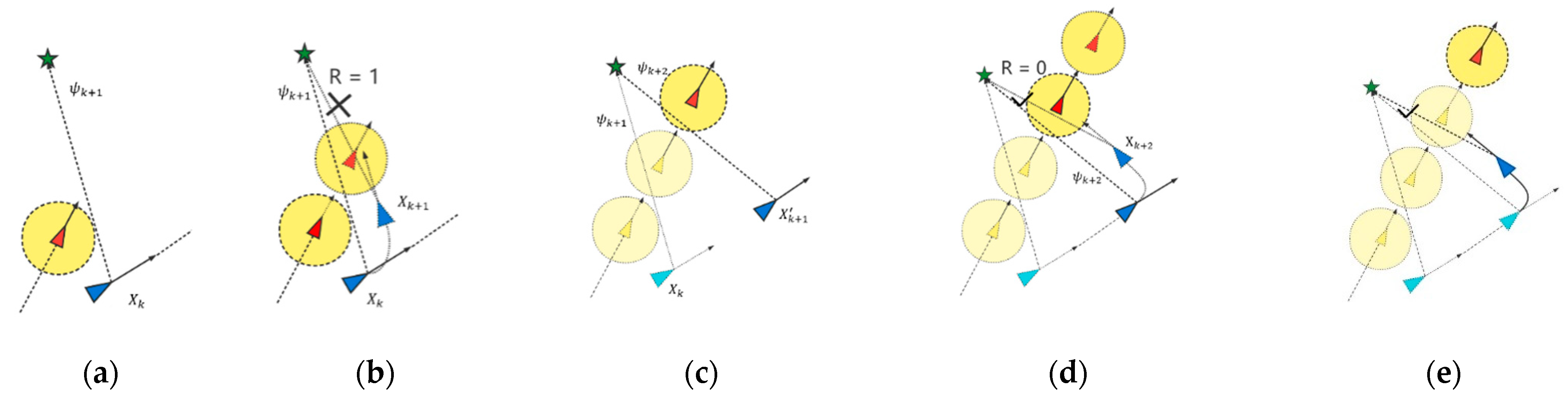
- The returning desired course is generated by LOS method (in the Figure 7a).
- The ship model as well as the controller model calculate the predicted status of own ship and the targeted ship based on initial status (in the Figure 7b).
- The detection function finds that based on predicted status, indicating that a collision accident is about to happen if the desired course is followed (in the Figure 7b). The own ship then keeps on its initial course not returning to the way point for an interval. (in the Figure 7b,c), after that interval the own ship repeats Step 1~2 with the current status , and then check the value of R this time, if it indicates safety, the own ship will return following the desired course (in the Figure 7d–e).
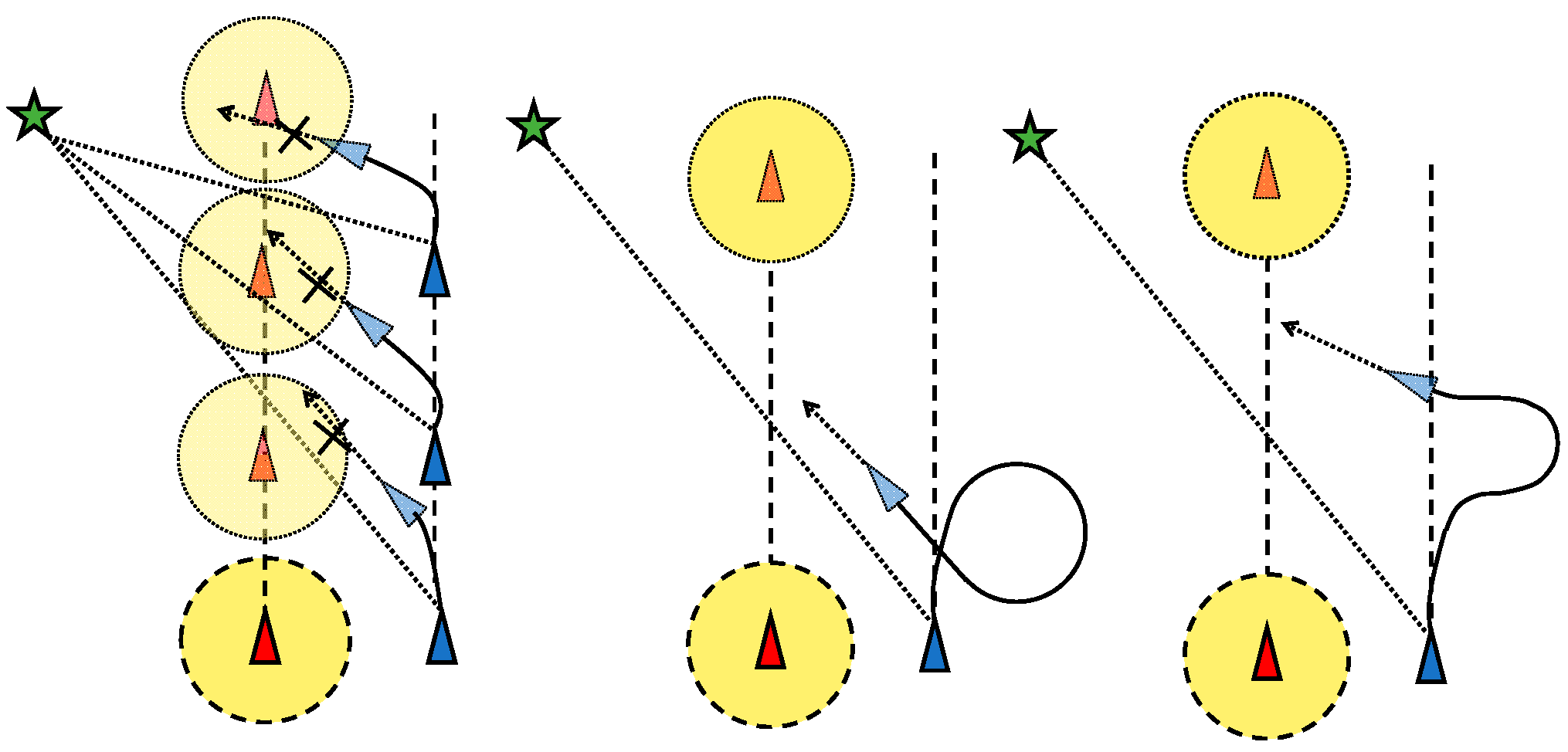
5.4. Large Angle Crossing Problem
5.5. The Whole Framework of the System
6. Experiment Results
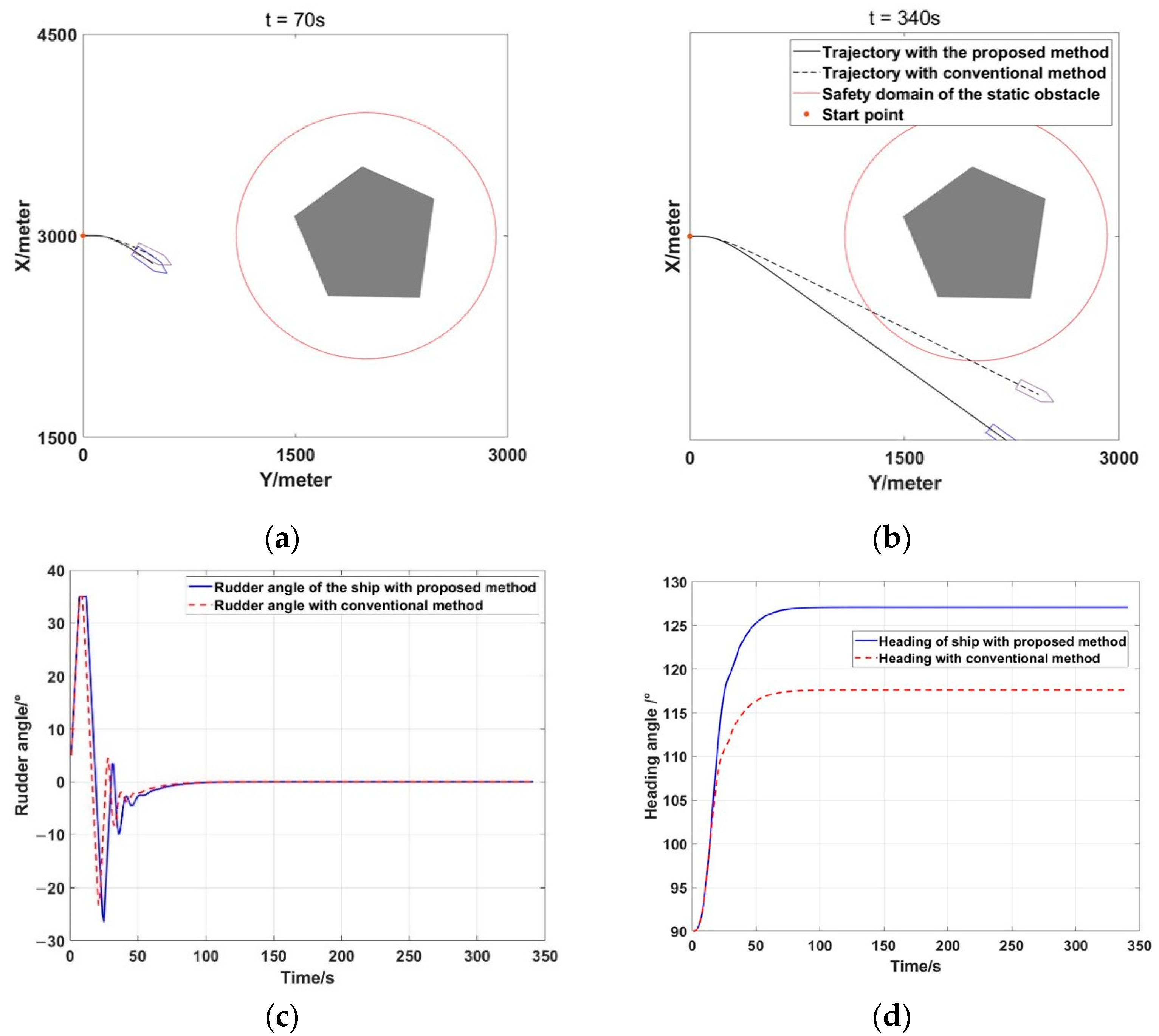
6.1. Single Obstacles
6.2. Multiple Ships
7. Discussions
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Y.; van Gelder, P.H.A.J.M. Time-Varying Risk Measurement for Ship Collision Prevention. Risk Anal. 2020, 40, 24–42. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.J.; Zhang, Y.J.; Sun, P.T.; Li, W.H. Research Summary of Unmanned Ship. Dalian Haishi Daxue Xuebao J. Dalian Marit. Univ. 2017, 43, 1–7. [Google Scholar]
- Yan, X.; Wang, S.; Ma, F.; Yan, X.; Wang, S.; Ma, F. Review and Prospect for Intelligent Cargo Ships. Chin. J. Ship Res. 2021, 16, 1–6. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-Constrained Real-Time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.; Cong, L.; Li, J.; Zhang, J. Research on Intelligent Collision Avoidance Decision-Making of Unmanned Ship in Unknown Environments. Evol. Syst. 2019, 10, 649–658. [Google Scholar] [CrossRef]
- Hu, Y.; Meng, X.; Zhang, Q.; Park, G.K. A Real-Time Collision Avoidance System for Autonomous Surface Vessel Using Fuzzy Logic. IEEE Access 2020, 8, 108835–108846. [Google Scholar] [CrossRef]
- Su, C.M.; Chang, K.Y.; Cheng, C.Y. Fuzzy Decision on Optimal Collision Avoidance Measures for Ships in Vessel Traffic Service. J. Mar. Sci. Technol. 2012, 20, 5. [Google Scholar] [CrossRef]
- Nomoto, K.; Taguchi, K.; Honda, K.; Hirano, S. On the Steering Qualities of Ships. J. Zosen Kiokai 1956, 1956, 75–82. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, X.; Chen, X.; Sang, L.; Zhang, D. A Novel Approach for Assistance with Anti-Collision Decision Making Based on the International Regulations for Preventing Collisions at Sea. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2012, 226, 250–259. [Google Scholar] [CrossRef]
- Wang, B.; He, Y.; Hu, W.; Mou, J.; Li, L.; Zhang, K.; Huang, L. A Decision-Making Method for Autonomous Collision Avoidance for the Stand-on Vessel Based on Motion Process and Colregs. J. Mar. Sci. Eng. 2021, 9, 584. [Google Scholar] [CrossRef]
- Kadir, R.E.A.; Sahal, M.; Gamayanti, N.; Pratama, F.I. Dynamic Path Planning of Unmanned Surface Vehicle Based On Genetic Algorithm With Sliding Curve Guidance System. JAREE J. Adv. Res. Electr. Eng. 2021, 5, 47–56. [Google Scholar] [CrossRef]
- Guo, X.; Ji, M.; Zhao, Z.; Wen, D.; Zhang, W. Global Path Planning and Multi-Objective Path Control for Unmanned Surface Vehicle Based on Modified Particle Swarm Optimization (PSO) Algorithm. Ocean Eng. 2020, 216, 107693. [Google Scholar] [CrossRef]
- Wang, H.; Guo, F.; Yao, H.; He, S.; Xu, X. Collision Avoidance Planning Method of USV Based on Improved Ant Colony Optimization Algorithm. IEEE Access 2019, 7, 52964–52975. [Google Scholar] [CrossRef]
- Shen, H.; Hashimoto, H.; Matsuda, A.; Taniguchi, Y.; Terada, D.; Guo, C. Automatic Collision Avoidance of Multiple Ships Based on Deep Q-Learning. Appl. Ocean Res. 2019, 86, 268–288. [Google Scholar] [CrossRef]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship Collision Avoidance and COLREGS Compliance Using Simulation-Based Control Behavior Selection with Predictive Hazard Assessment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3407–3422. [Google Scholar] [CrossRef] [Green Version]
- Borkowski, P.; Zwierzewicz, Z. Ship Course-Keeping Algorithm Based on Knowledge Base. Intell. Autom. Soft Comput. 2013, 17, 149–163. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. Collision Avoidance Using Finite Control Set Model Predictive Control for Unmanned Surface Vehicle. Appl. Sci. 2018, 8, 926. [Google Scholar] [CrossRef] [Green Version]
- Kozynchenko, A.I.; Kozynchenko, S.A. Applying the Dynamic Predictive Guidance to Ship Collision Avoidance: Crossing Case Study Simulation. Ocean Eng. 2018, 164, 640–649. [Google Scholar] [CrossRef]
- Borkowski, P.; Pietrzykowski, Z.; Magaj, J. The Algorithm of Determining an Anti-Collision Manoeuvre Trajectory Based on the Interpolation of Ship’s State Vector. Sensors 2021, 21, 5332. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hobeken, NJ, USA, 2011. [Google Scholar]
- Tsourdos, A.; White, B.; Shanmugavel, M. Cooperative Path Planning of Unmanned Aerial Vehicles; John Wiley & Sons: Hobeken, NJ, USA, 2010. [Google Scholar]
- Lisowski, J. Synthesis of a Path-Planning Algorithm for Autonomous Robots Moving in a Game Environment during Collision Avoidance. Electronics 2021, 10, 675. [Google Scholar] [CrossRef]
- Zhao, L.; Roh, M.-I.; Lee, S.-J. Control method for path following and collision avoidance of autonomous ship based on deep reinforcement learning. J. Mar. Sci. Technol. 2019, 27, 1. [Google Scholar] [CrossRef]
- Liu, Y.; Bu, R.; Gao, X. Ship Trajectory Tracking Control System Design Based on Sliding Mode Control Algorithm. Pol. Marit. Res. 2018, 3, 26–34. [Google Scholar] [CrossRef] [Green Version]
- Abdelaal, M.; Fränzle, M.; Hahn, A. Nonlinear Model Predictive Control for Trajectory Tracking and Collision Avoidance of Underactuated Vessels with Disturbances. Ocean Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Feng, Y.-X.; Zhang, X.-K. An Improved Control Algorithm for Ship Course Keeping Based on Nonlinear Feedback and Decoration. In Proceedings of the 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 297–303. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, X.-K.; Im, N.-K. Ship Nonlinear-Feedback Course Keeping Algorithm Based on MMG Model Driven by Bipolar Sigmoid Function for Berthing. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 525–536. [Google Scholar] [CrossRef]
- Källström, C.; Åström, K.J.; Byström, L.; Norrbin, N.H. Further Studies of Parameter Identification of Linear and Nonlinear Ship Steering Dynamics; The Swedish State Shipbuilding Experimental Tank: Report 1920-6; Statens Skeppsprovningsanstalt: Gothenburg, Sweden, 1977. [Google Scholar]
- Witkowska, A.; Tomera, M.; Śmierzchalski, R. A Backstepping Approach to Ship Course Control. Int. J. Appl. Math. Comput. Sci. 2007, 17, 73–85. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.K.; Zhang, Q.; Ren, H.X.; Yang, G.P. Linear Reduction of Backstepping Algorithm Based on Nonlinear Decoration for Ship Course-Keeping Control System. Ocean Eng. 2018, 147, 1–8. [Google Scholar] [CrossRef]
- Pierson, W.J.; Moskowitz, L. A Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of S. A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Min, B.; Zhang, X.; Wang, Q. Energy Saving of Course Keeping for Ships Using CGSA and Nonlinear Decoration. IEEE Access 2020, 8, 141622–141631. [Google Scholar] [CrossRef]
- Baran, A.; Fiskin, R.; Kiźi, H. A Research on Concept of Ship Safety Domain. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 43–47. [Google Scholar] [CrossRef]
- Fujii, Y.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Xu, Q.; Wang, N. A Survey on Ship Collision Risk Evaluation. Promet—Traffic Transp. 2014, 26, 475–486. [Google Scholar] [CrossRef]
- Park, J.; Jeong, J.-S. An Estimation of Ship Collision Risk Based on Relevance Vector Machine. J. Mar. Sci. Eng. 2021, 9, 538. [Google Scholar] [CrossRef]
- Shaobo, W.; Yingjun, Z.; Lianbo, L. A Collision Avoidance Decision-Making System for Autonomous Ship Based on Modified Velocity Obstacle Method. Ocean Eng. 2020, 215, 107910. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Ship’s Trajectory Planning for Collision Avoidance at Sea Based on Modified Artificial Potential Field. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE 2017), Shanghai, China, 29–31 December 2018; Volume 2017. [Google Scholar]
- Sawada, R.; Sato, K.; Majima, T. Automatic Ship Collision Avoidance Using Deep Reinforcement Learning with LSTM in Continuous Action Spaces. J. Mar. Sci. Technol. 2021, 26, 509–524. [Google Scholar] [CrossRef]
- Zaccone, R. COLREG-Compliant Optimal Path Planning for Real-Time Guidance and Control of Autonomous Ships. J. Mar. Sci. Eng. 2021, 9, 405. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R. Collision Risk Assessment for Ships. J. Mar. Sci. Technol. 2010, 15, 257–270. [Google Scholar] [CrossRef]
- Ding, Z.; Zhang, X.; Wang, C.; Li, Q.; An, L.; Ding, Z.; Zhang, X.; Wang, C.; Li, Q.; An, L. Intelligent Collision Avoidance Decision-Making Method for Unmanned Ships Based on Driving Practice. Chin. J. Ship Res. 2021, 16, 96–104; 113. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; van Gelder, P.H.A.J.M. Generalized Velocity Obstacle Algorithm for Preventing Ship Collisions at Sea. Ocean Eng. 2019, 173, 142–156. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Mou, J.; van Gelder, P.H.A.J.M. Ship Collision Candidate Detection Method: A Velocity Obstacle Approach. Ocean Eng. 2018, 170, 186–198. [Google Scholar] [CrossRef]
- Cho, Y.; Han, J.; Kim, J. Efficient COLREG-Compliant Collision Avoidance in Multi-Ship Encounter Situations. IEEE Trans. Intell. Transp. Syst. 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- Imazu, H. Research on Collision Avoidance Manoeuvre; Tokyo University of Marine Science and Technology: Tokyo, Japan, 1987. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Color of Areas | Descriptions |
|---|---|
 | Own ship is in an obligation to give way, the starboard rudder should be taken. |
 | Own ship should keep course and speed and take necessary actions (starboard or left rudder) when the give-way vessel does not take appropriate actions. |
 | Own ship is in the overtaking situation, free to take starboard or left rudder but is always on duty of giving way |
| Acronyms | Encounter Situations |
| HO | Head on |
| RC | Right cross |
| LC | Left Cross |
| OT1 | Overtaking |
| OT2 | Overtaken |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Zhang, Y.; Wang, S. A Coordination System between Decision Making and Controlling for Autonomous Collision Avoidance of Large Intelligent Ships. J. Mar. Sci. Eng. 2021, 9, 1202. https://doi.org/10.3390/jmse9111202
Zhou Z, Zhang Y, Wang S. A Coordination System between Decision Making and Controlling for Autonomous Collision Avoidance of Large Intelligent Ships. Journal of Marine Science and Engineering. 2021; 9(11):1202. https://doi.org/10.3390/jmse9111202
Chicago/Turabian StyleZhou, Zhengyu, Yingjun Zhang, and Shaobo Wang. 2021. "A Coordination System between Decision Making and Controlling for Autonomous Collision Avoidance of Large Intelligent Ships" Journal of Marine Science and Engineering 9, no. 11: 1202. https://doi.org/10.3390/jmse9111202
APA StyleZhou, Z., Zhang, Y., & Wang, S. (2021). A Coordination System between Decision Making and Controlling for Autonomous Collision Avoidance of Large Intelligent Ships. Journal of Marine Science and Engineering, 9(11), 1202. https://doi.org/10.3390/jmse9111202