
Hydrodynamic Performance of a Multi-Module Three-Cylinder Floating Breakwater System under the Influence of Reefs: A 3D Experimental Study
Abstract
:1. Introduction
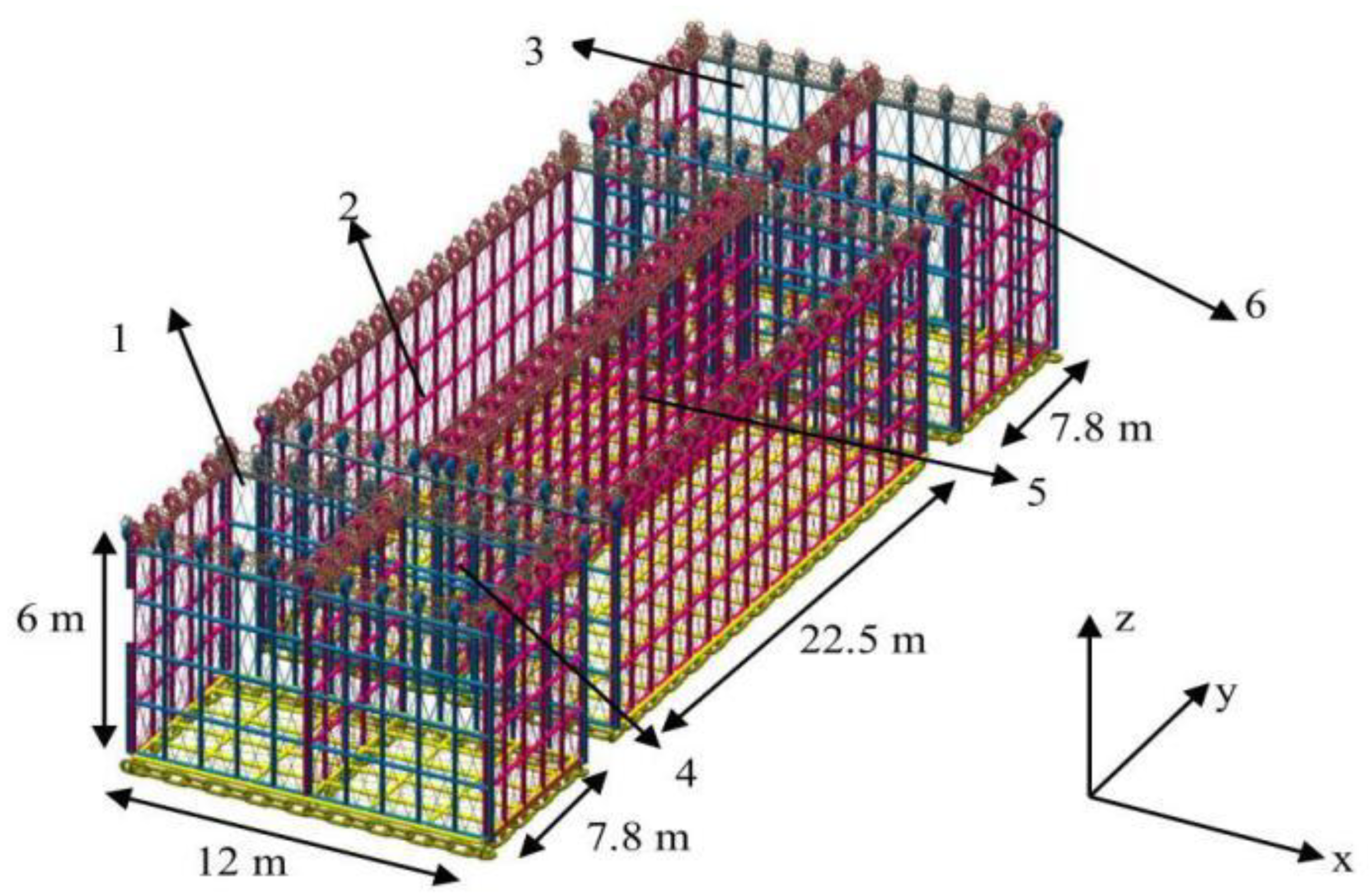
2. Configuration Design
3. Experimental Setup
3.1. Model Scale Ratio
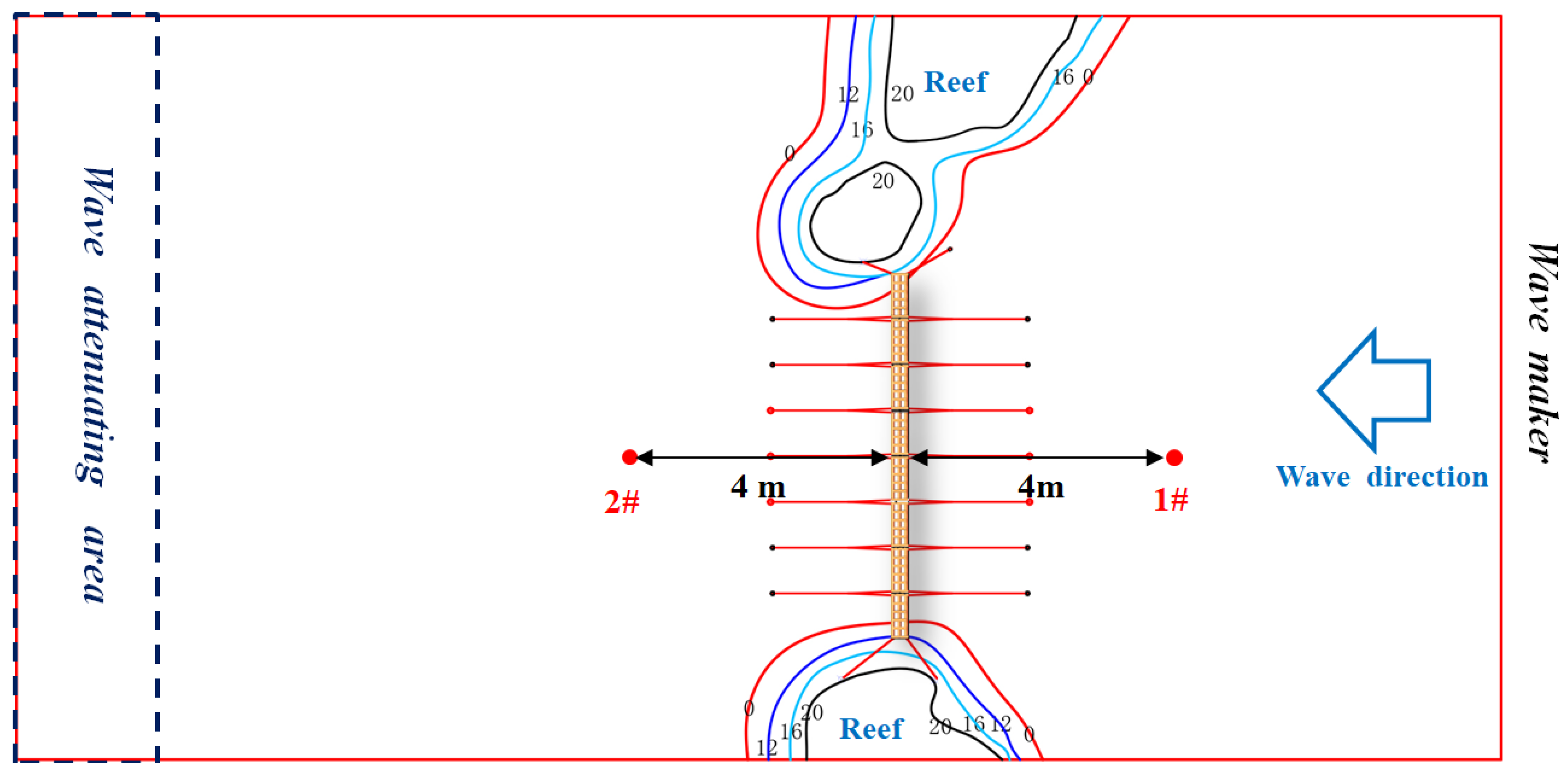
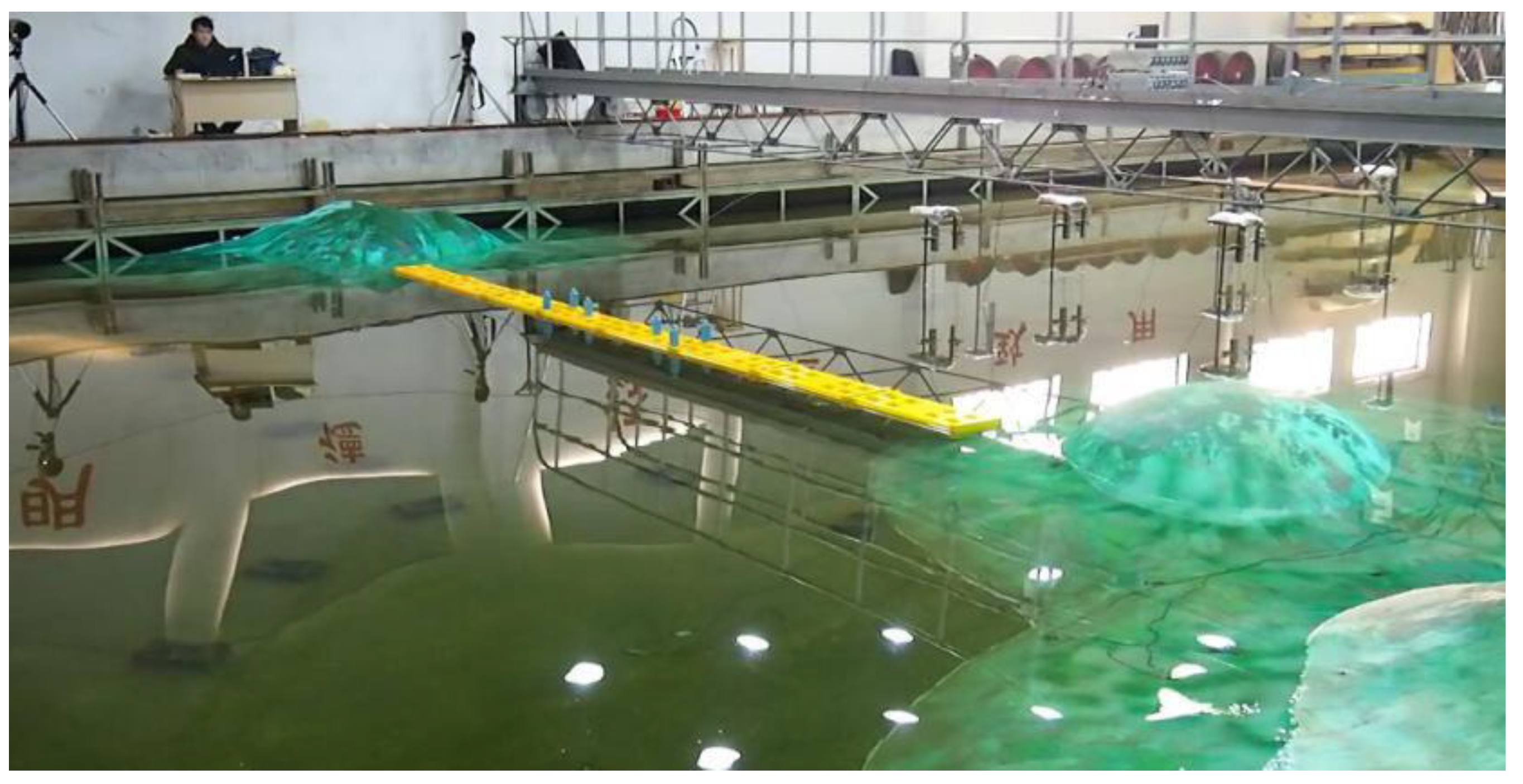
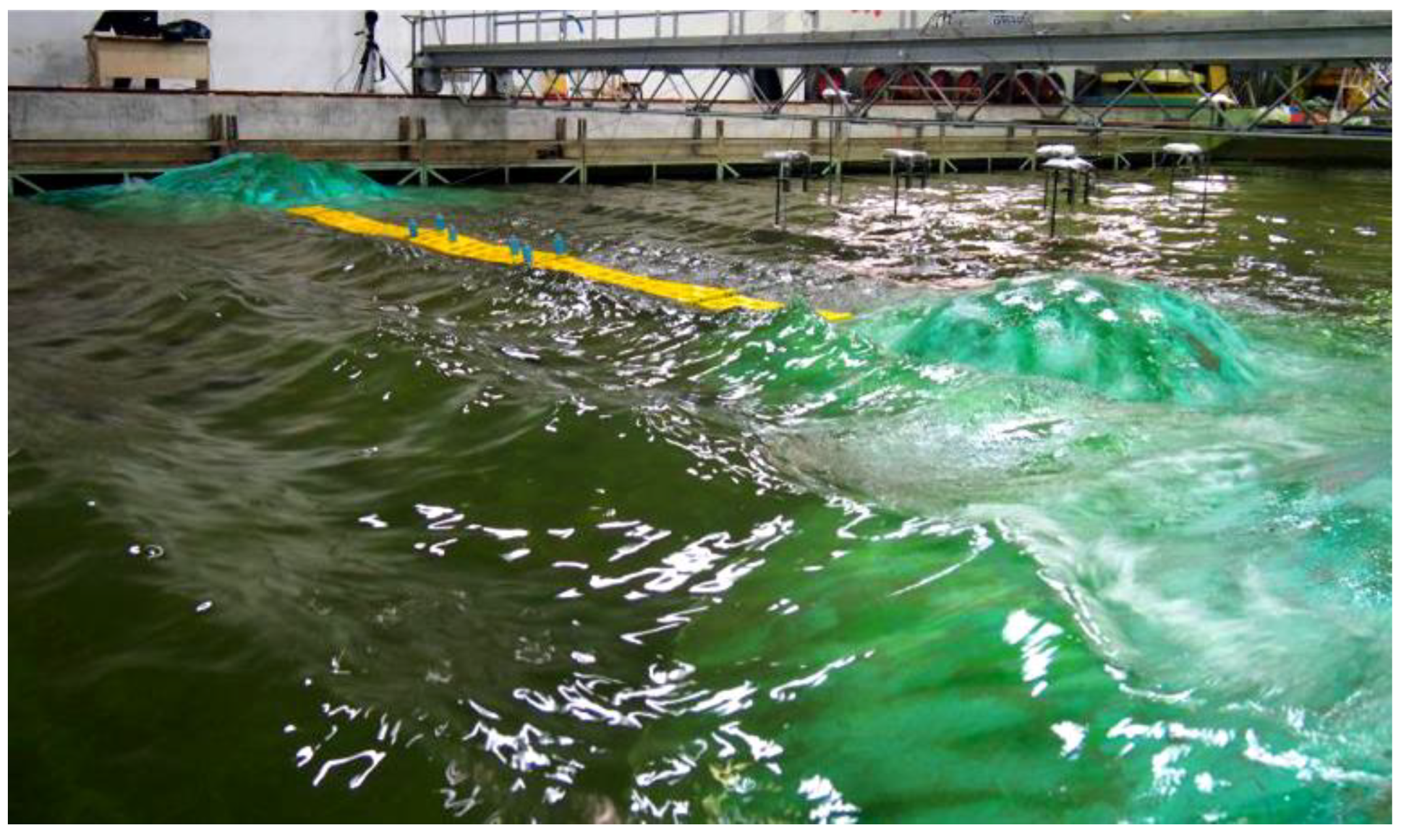
3.2. Experimental Facilities
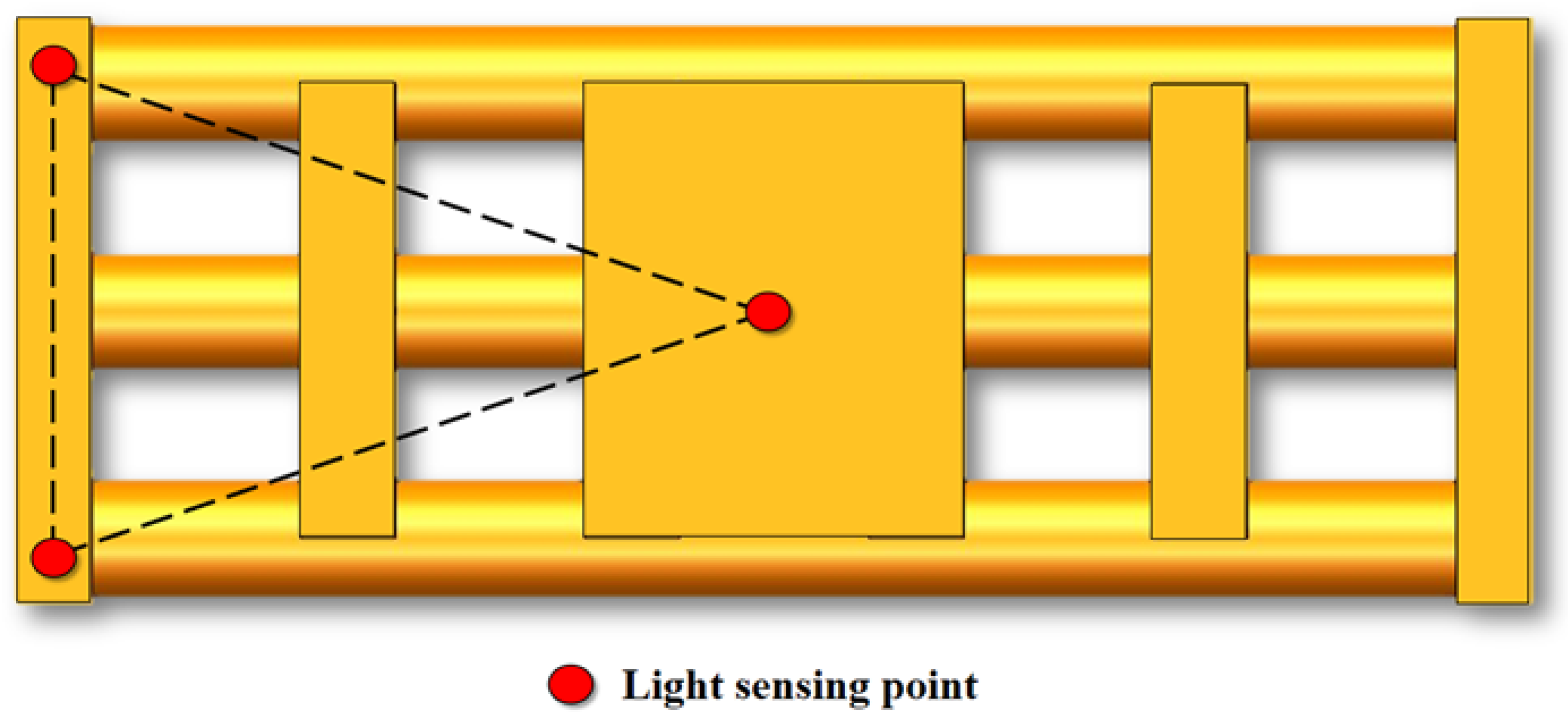
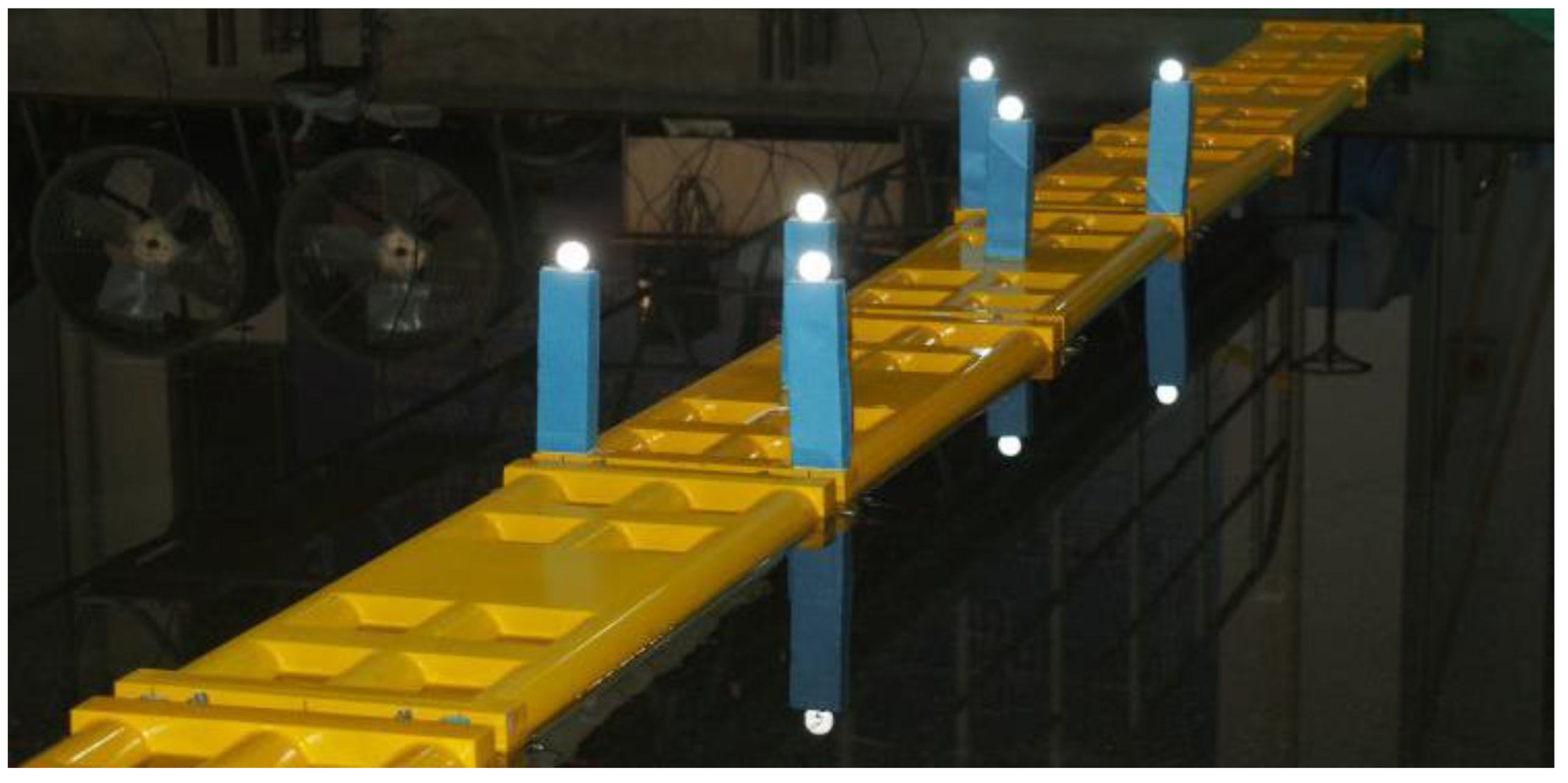
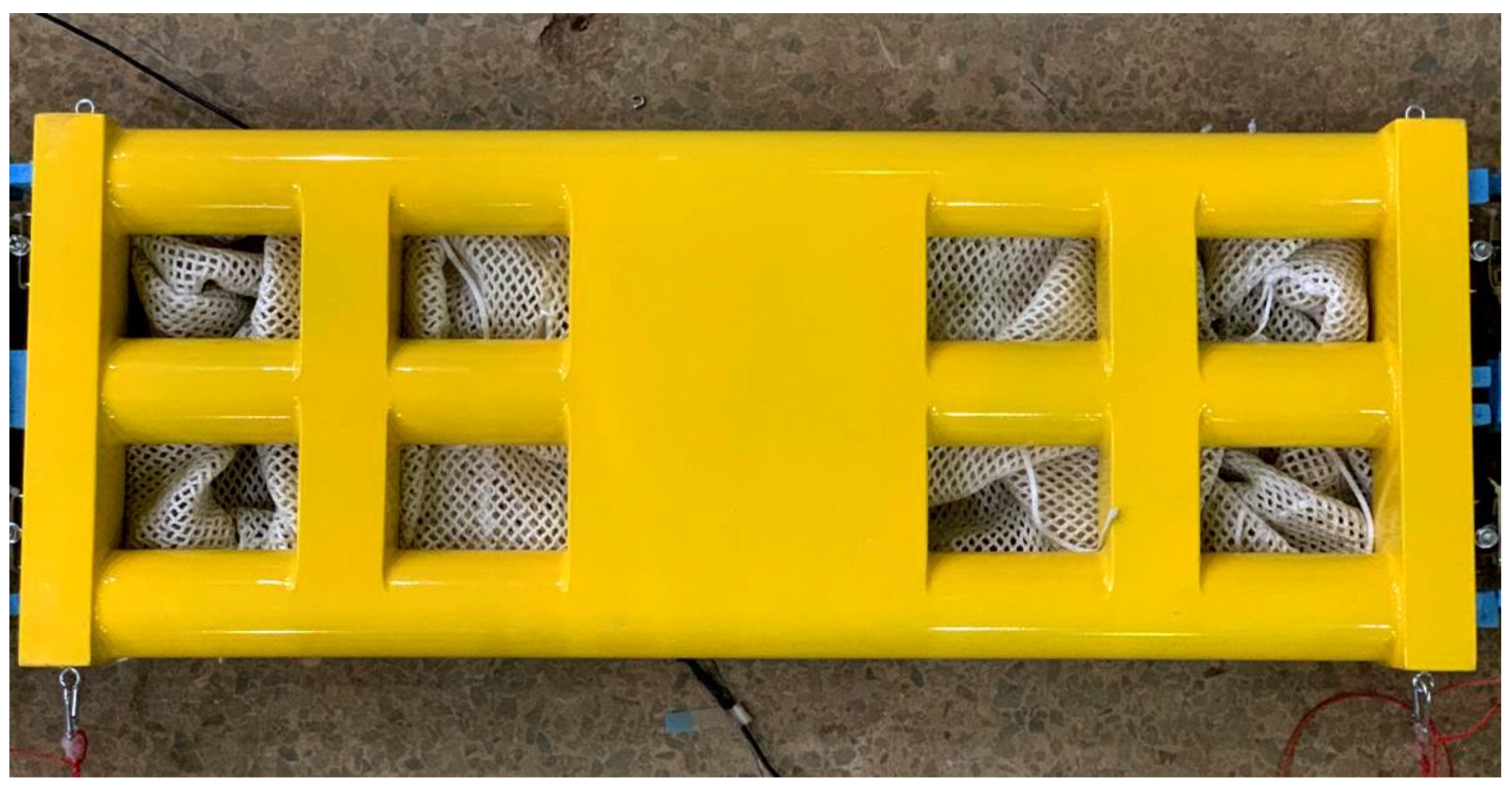
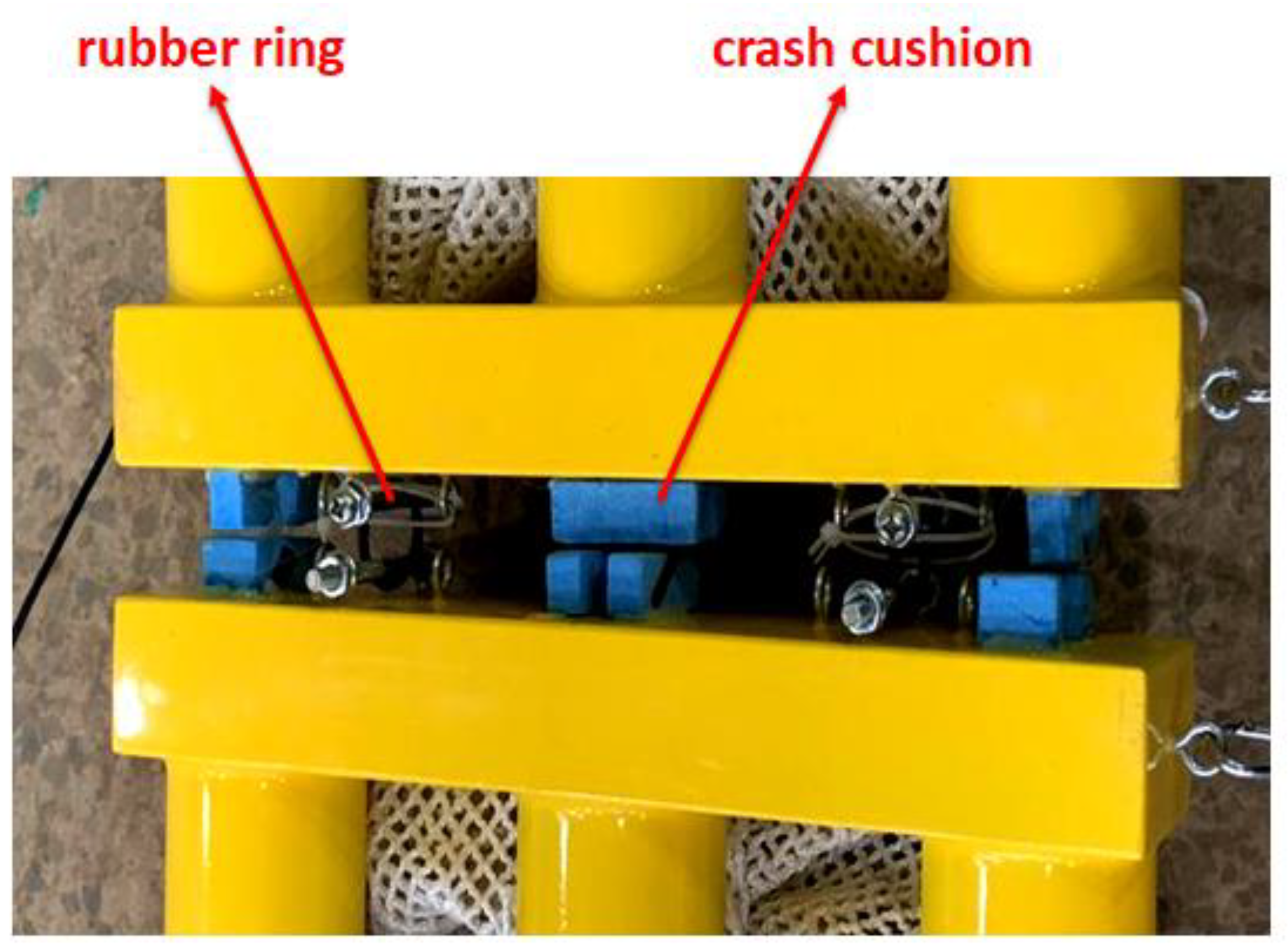
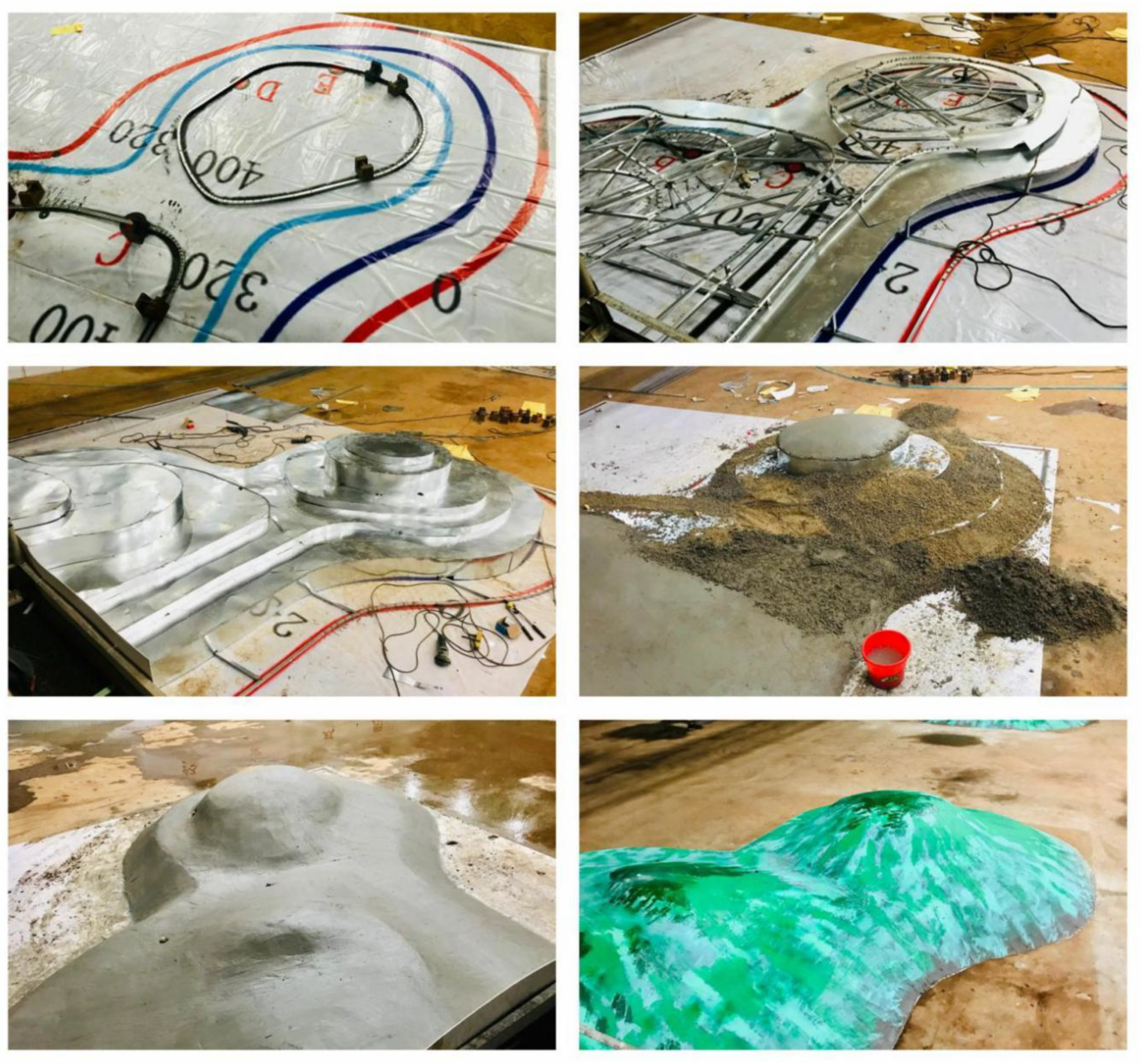
3.3. Experimental Models
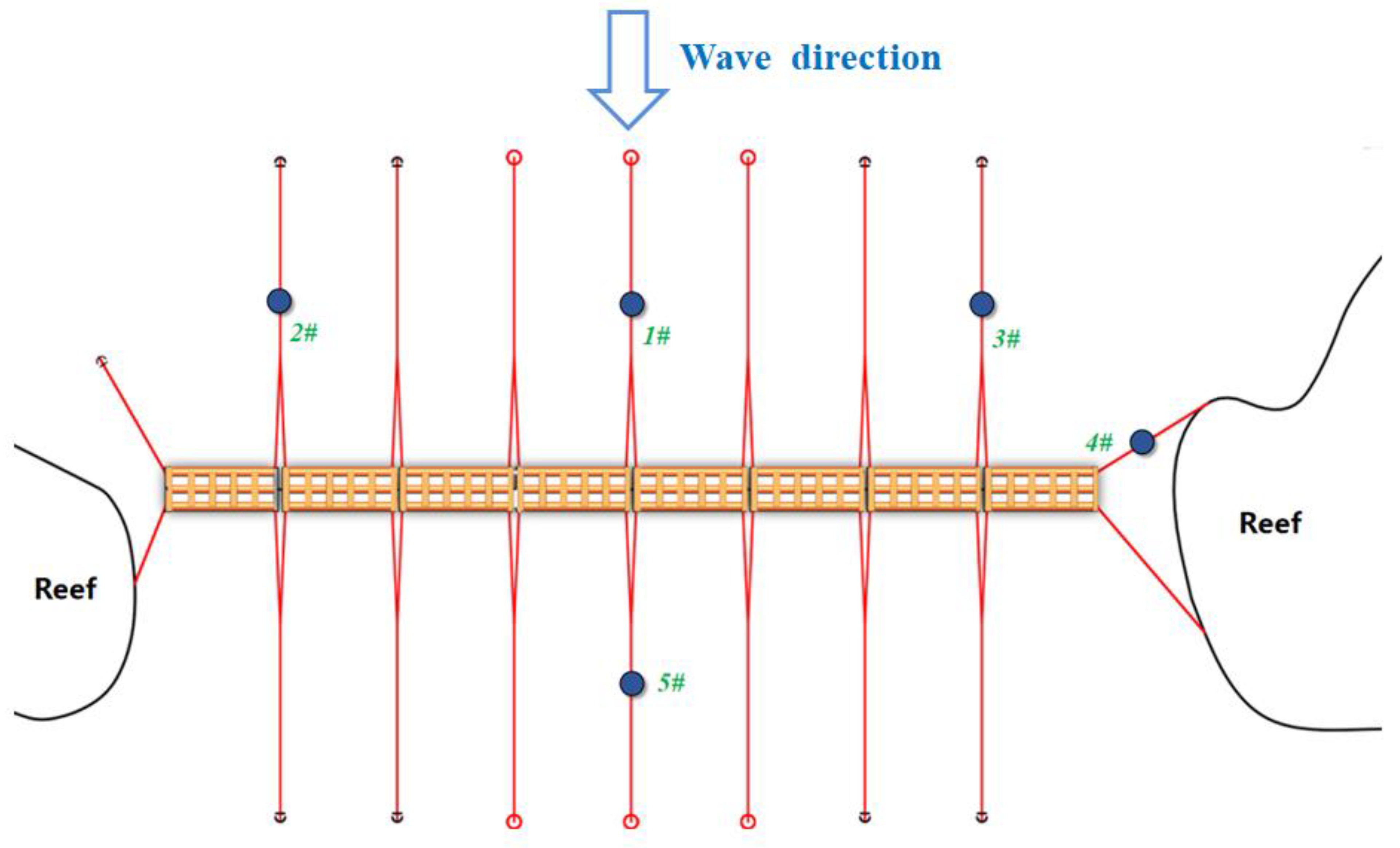
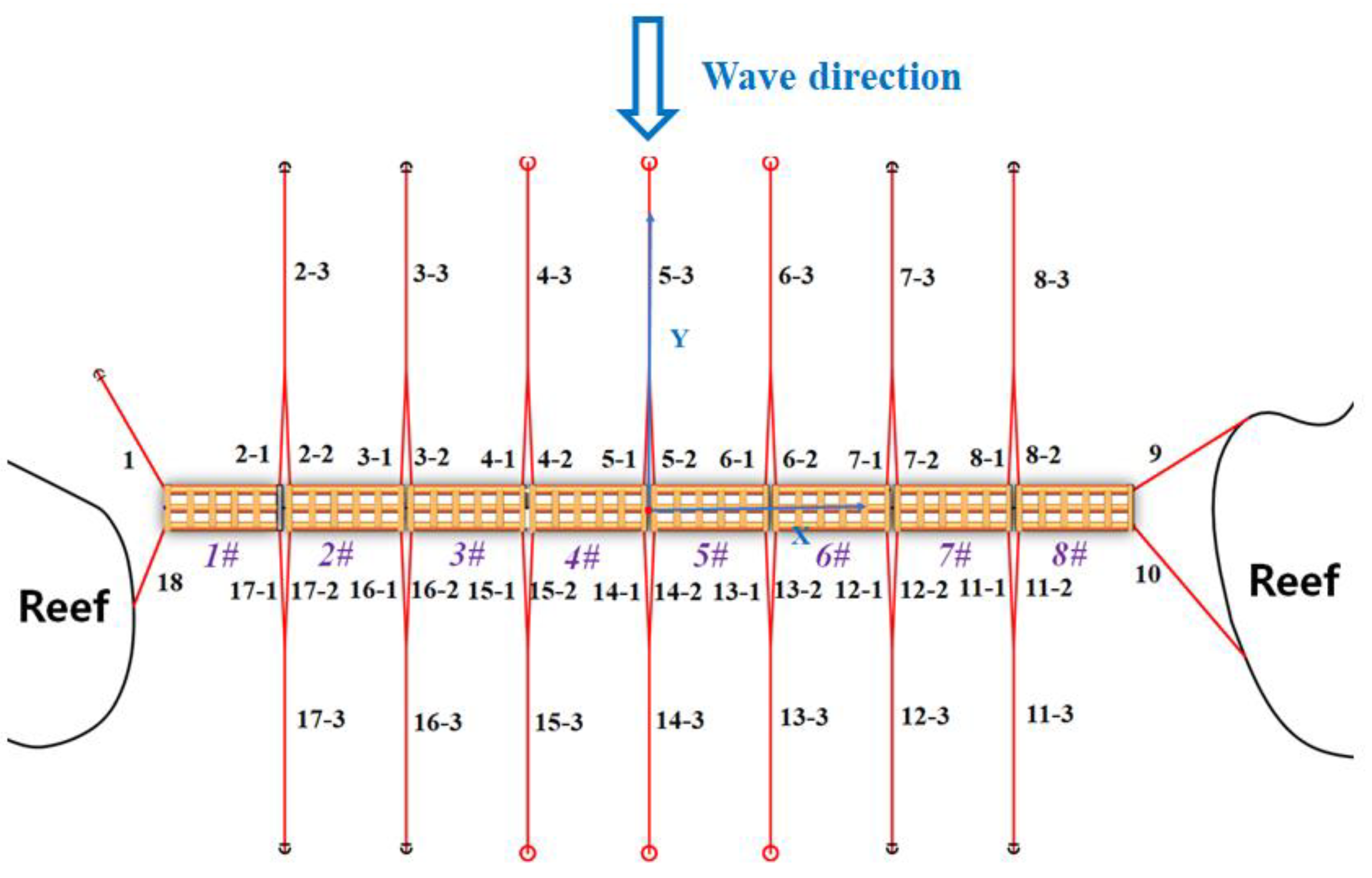
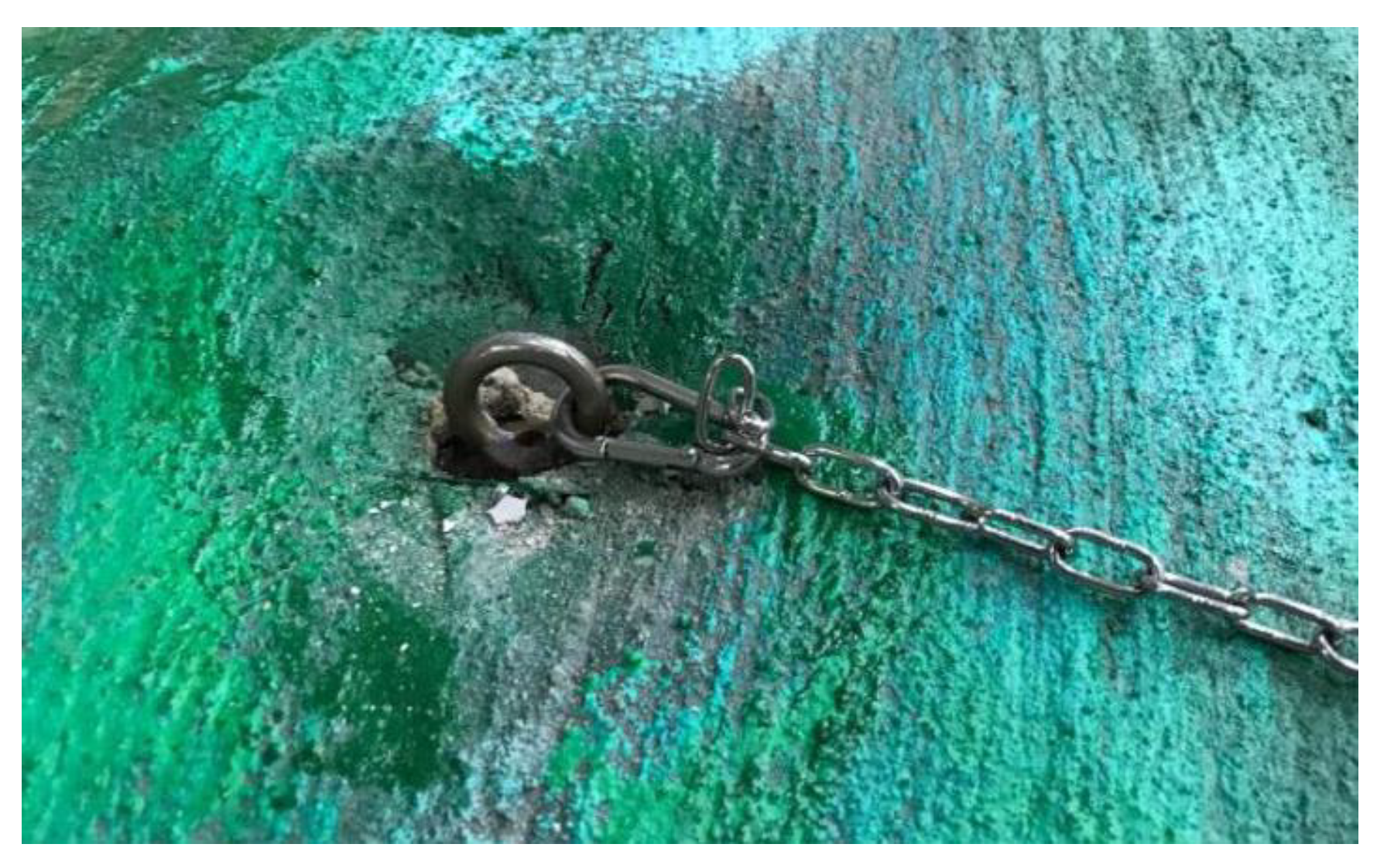
3.4. Mooring System
3.5. Experimental Wave Conditions
4. Results and Discussions
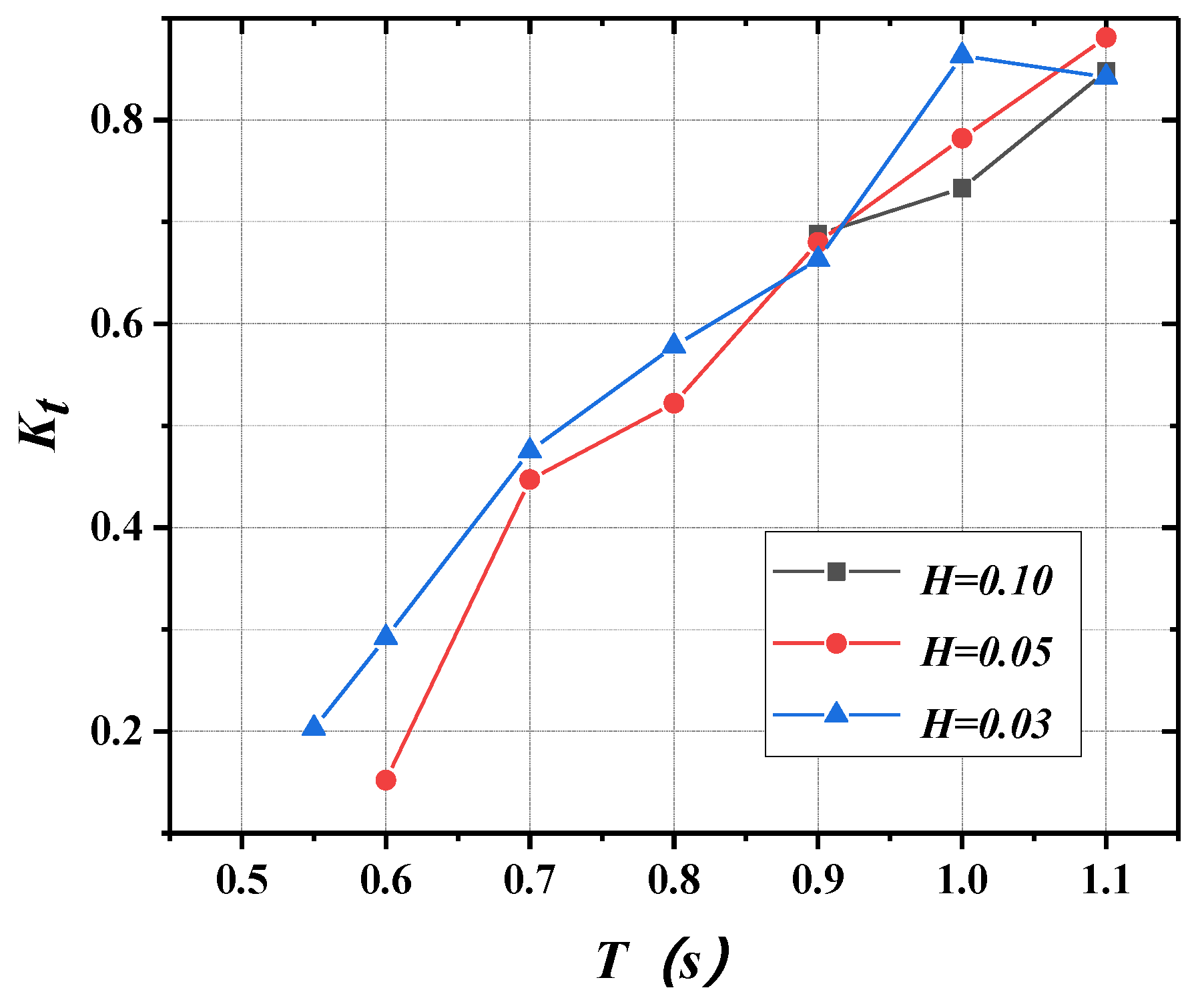
4.1. Wave Transmission Coefficients
4.2. Motion Responses
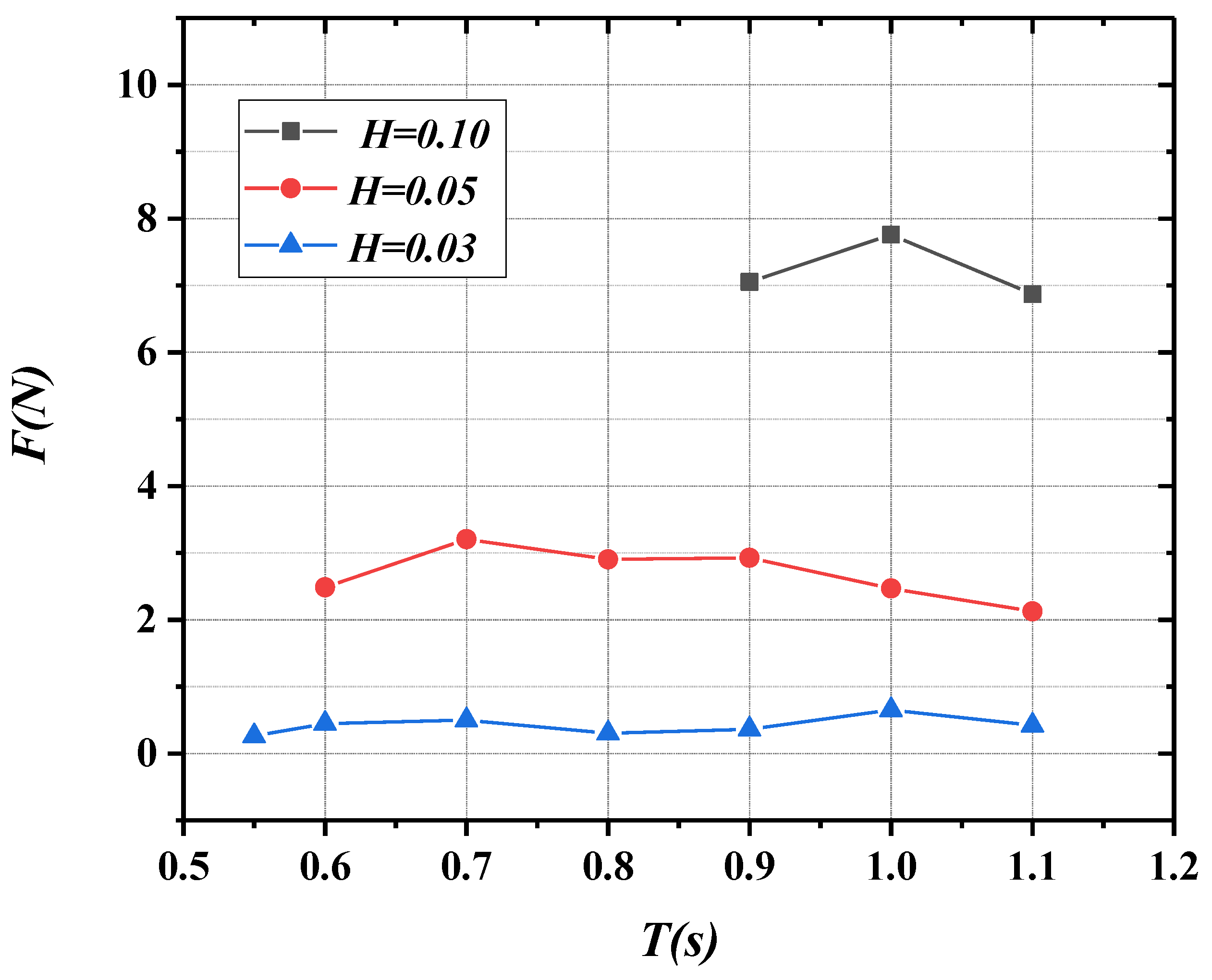
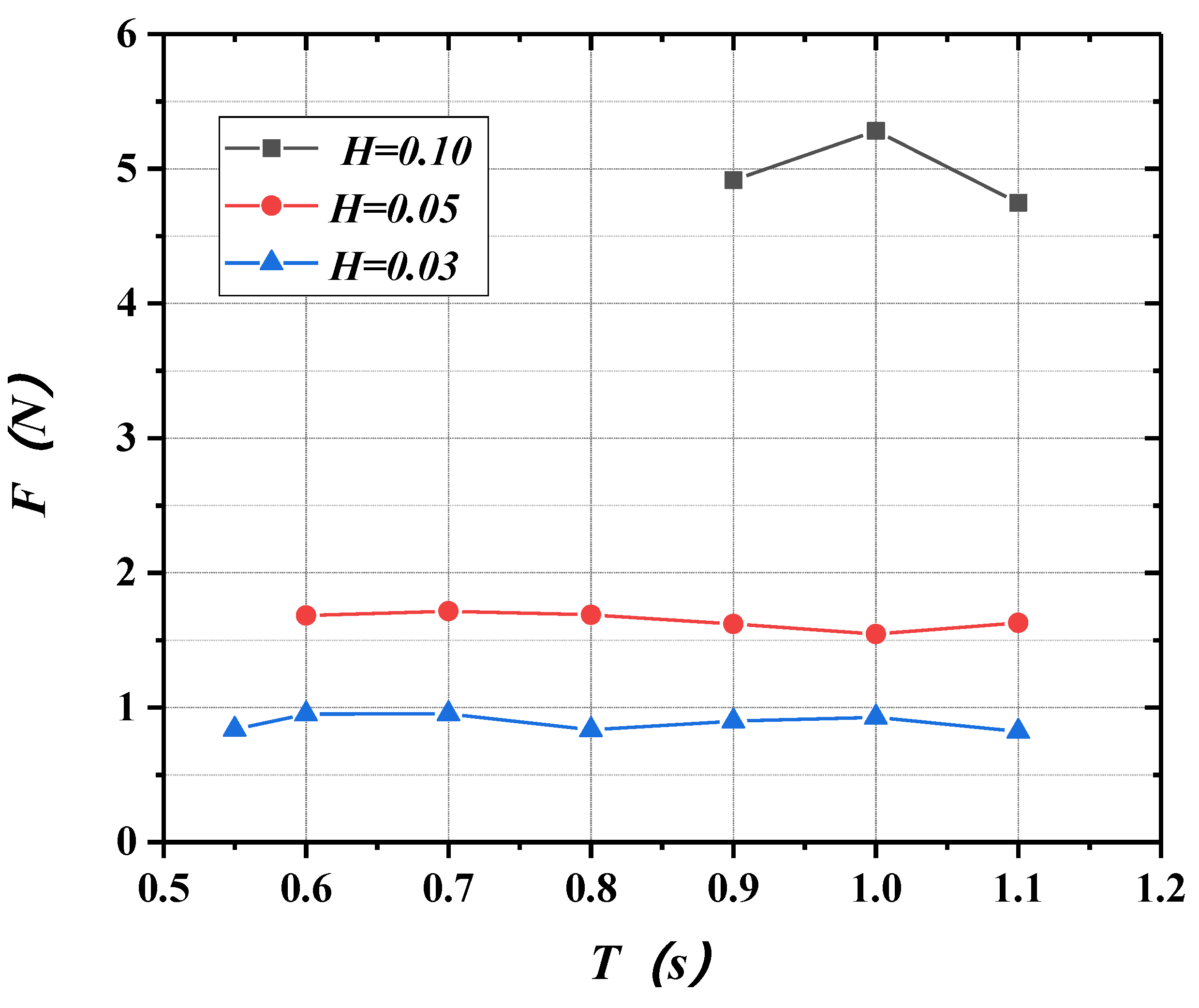
4.3. Mooring Forces
5. Conclusions
- (1)
- In the beam wave (β = 90°) conditions, the floating breakwaters exhibit remarkable wave attenuating performance in short-period waves (T < 0.9 s). Owing to the multiple coupling nonlinear interference of waves, reefs, and floating breakwaters, waves will produce an aggregation effect and a reflection effect, so the wave attenuating performance in long-period waves (T ≥ 1.0 s) was mediocre.
- (2)
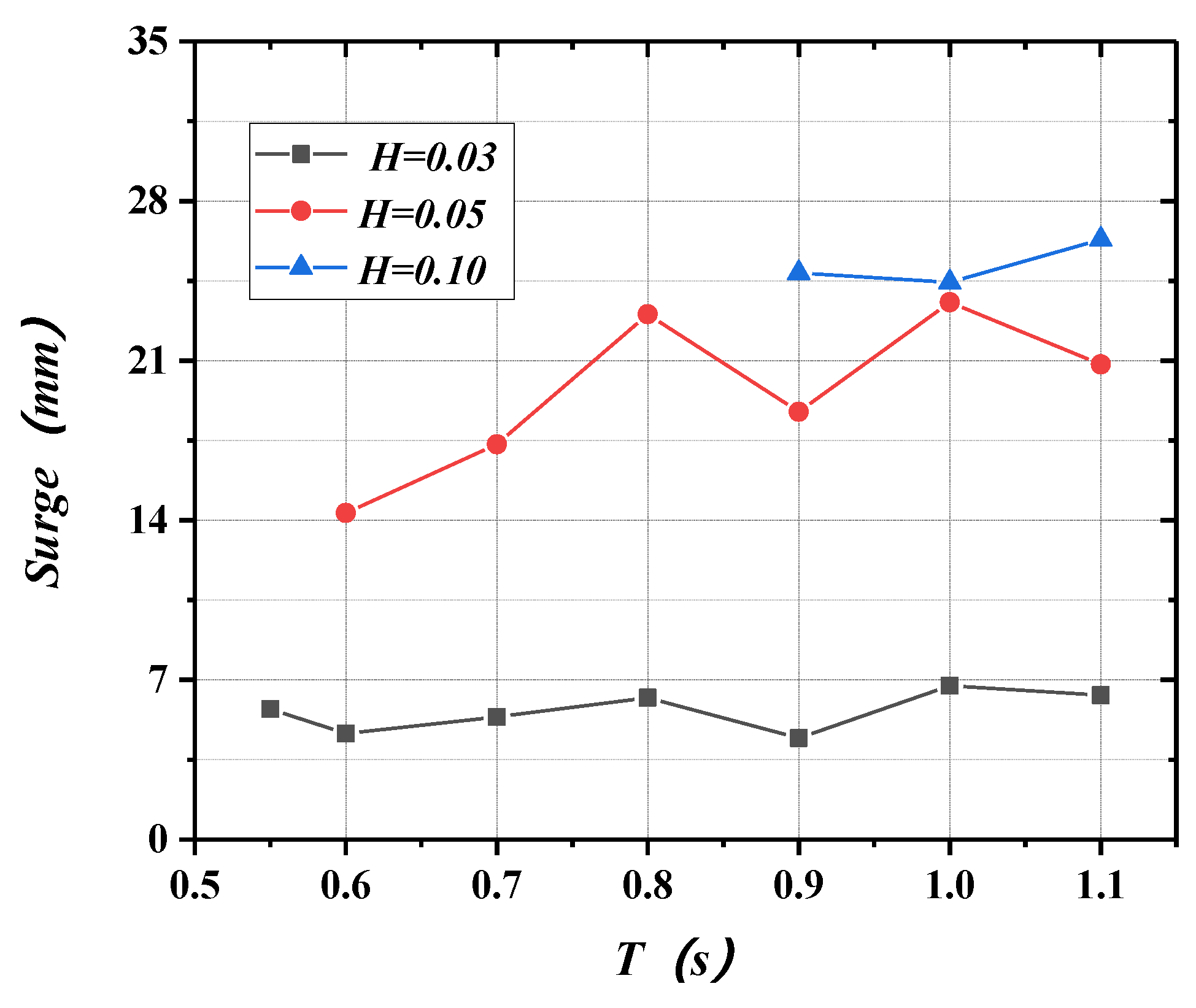
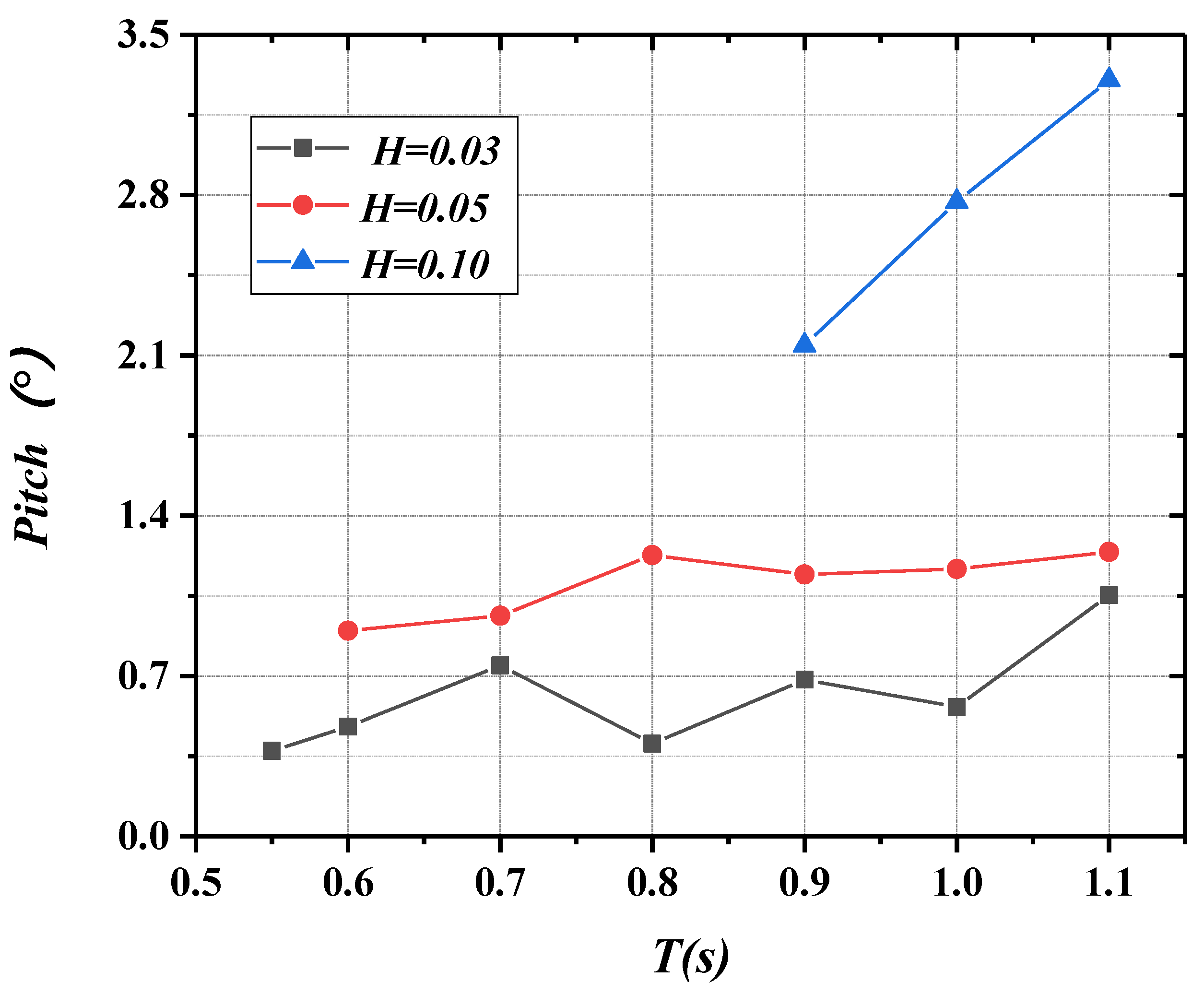
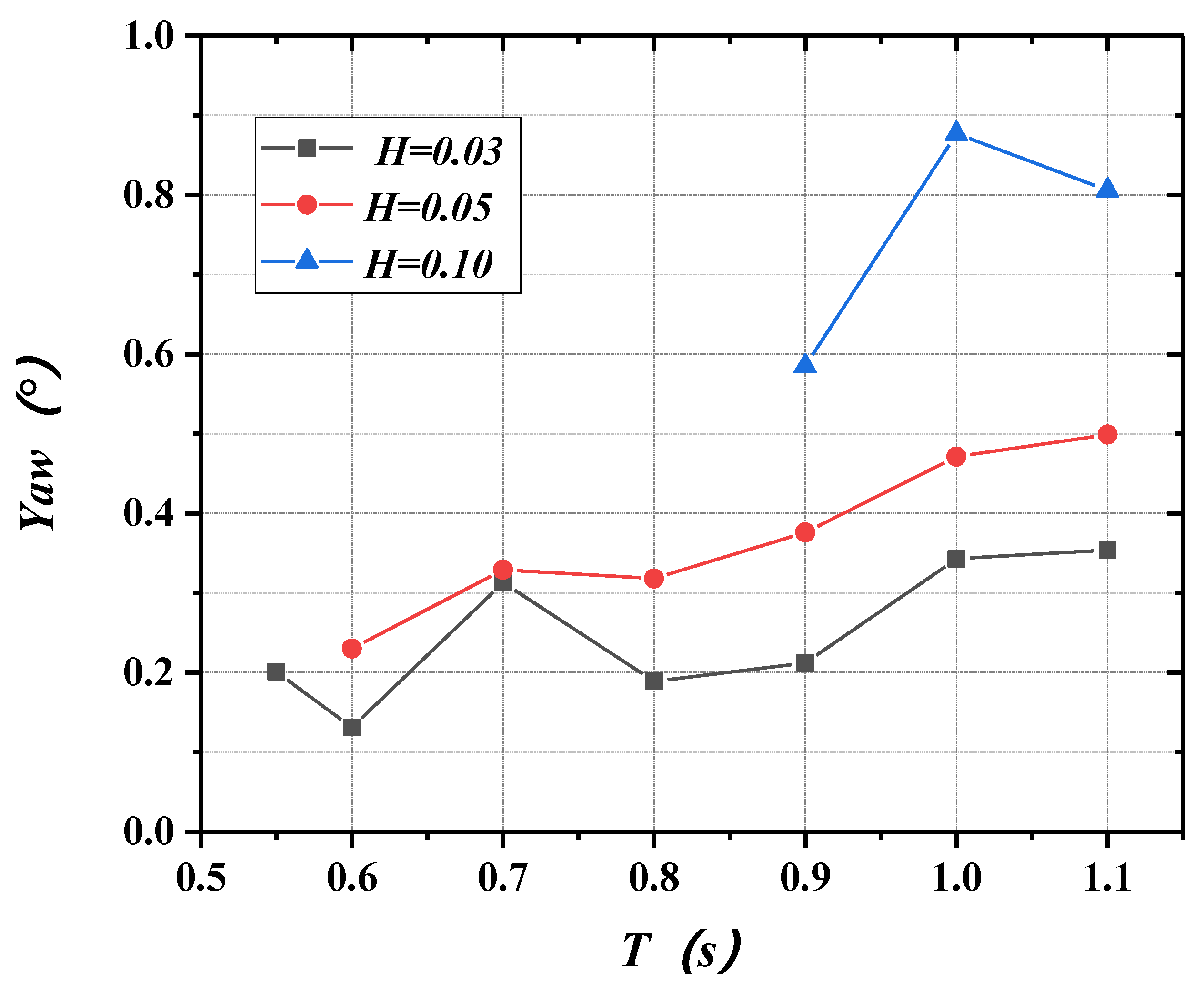
- The floating breakwaters will produce a certain surge and pitch under the action of beam waves (β = 90°) owing to the impact of reflected longitudinal waves from the reefs. Under the combined action of connectors and mooring systems, the yaw motions of the floating breakwaters are small.
- (3)
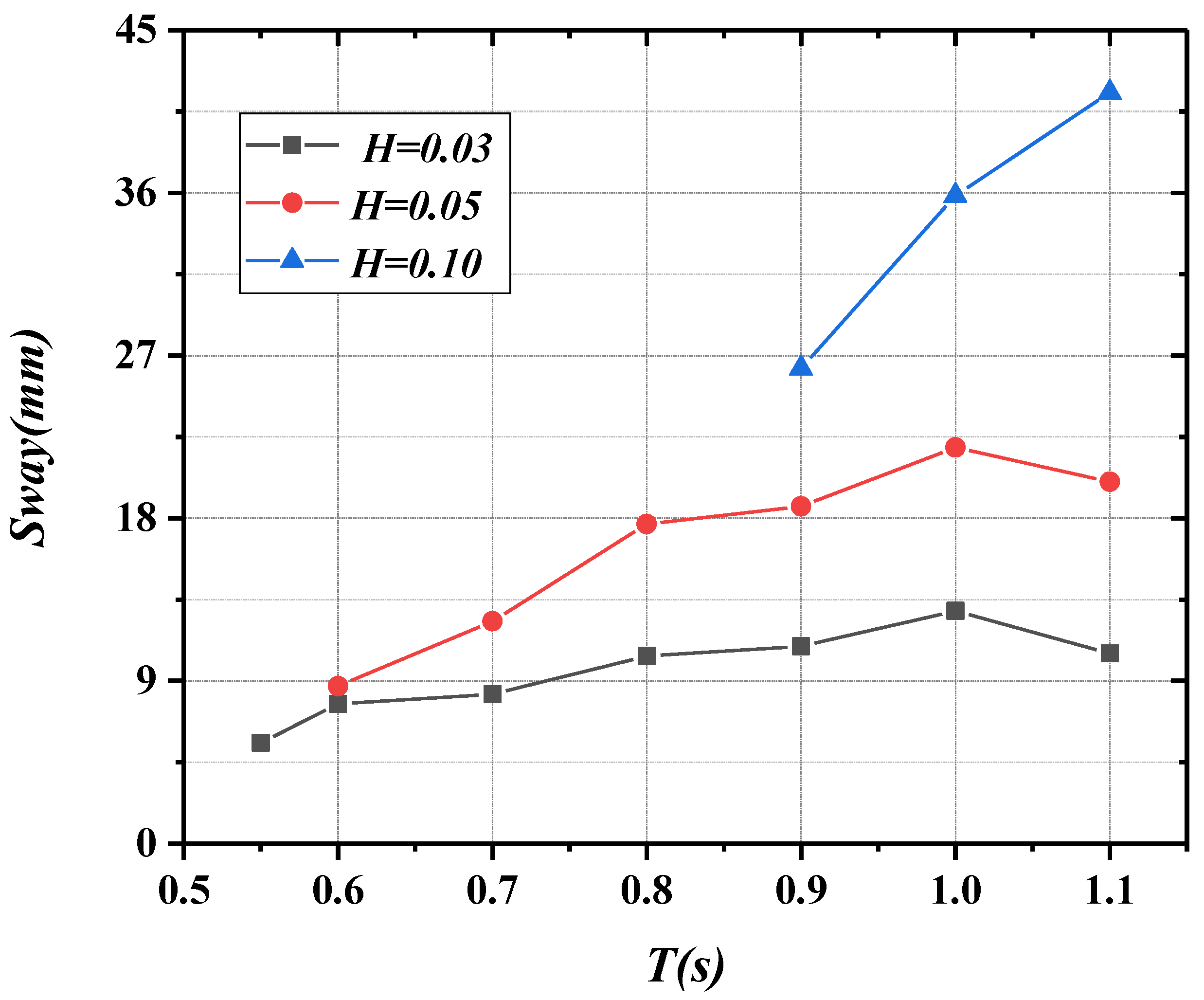
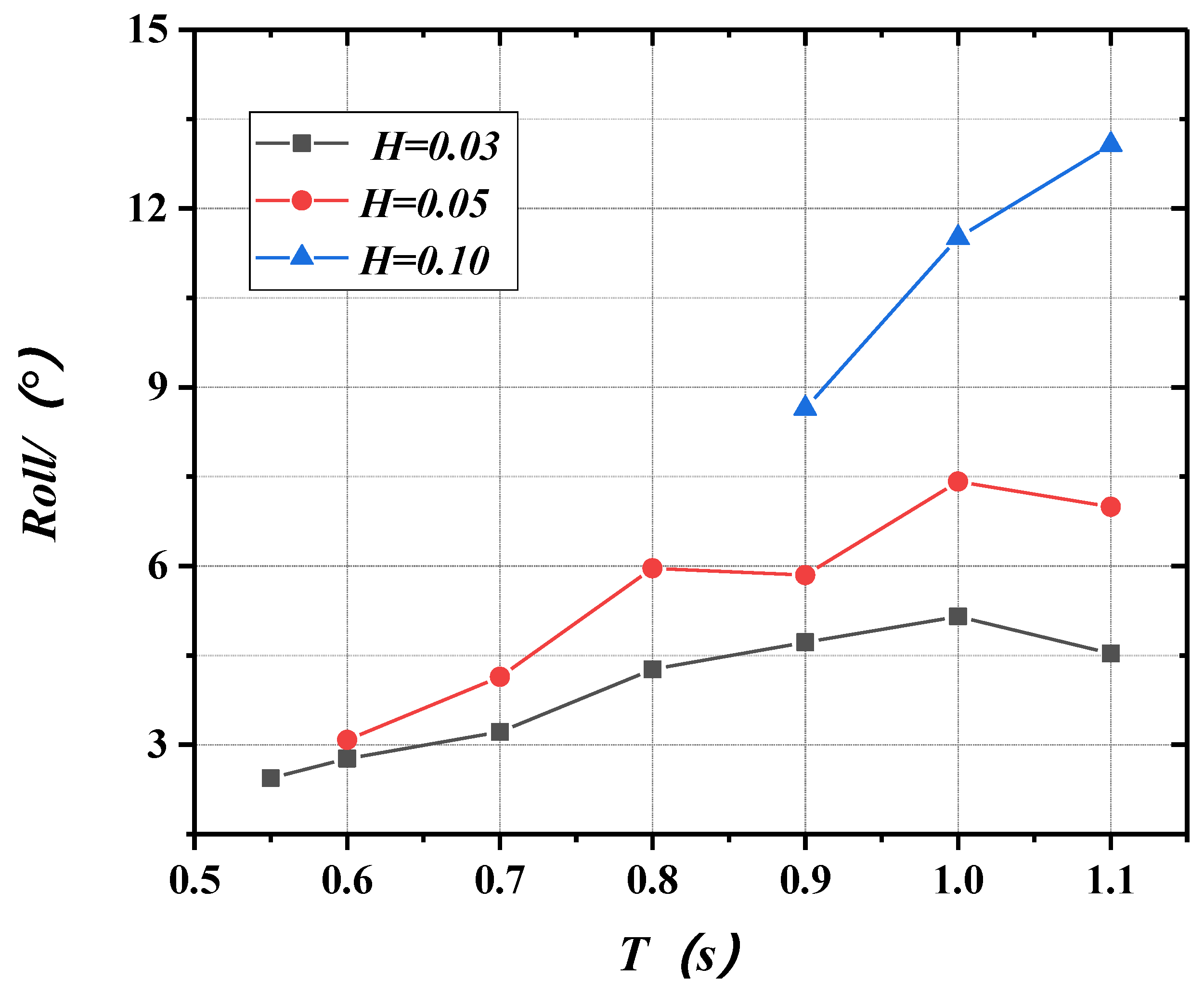
- Under the action of the beam waves (β = 90°), the overall motion performance of the floating breakwaters was good, but because of the influence of reef reflection waves and the shallow water effect, the motion responses in the three main stress directions of the floating breakwaters were large. During the design and installation of the floating breakwaters in a reef area, it is necessary to prevent the floating breakwater from bottoming and colliding with the reef, taking into account the surge and heave of the floating breakwater in the reef area.
- (4)
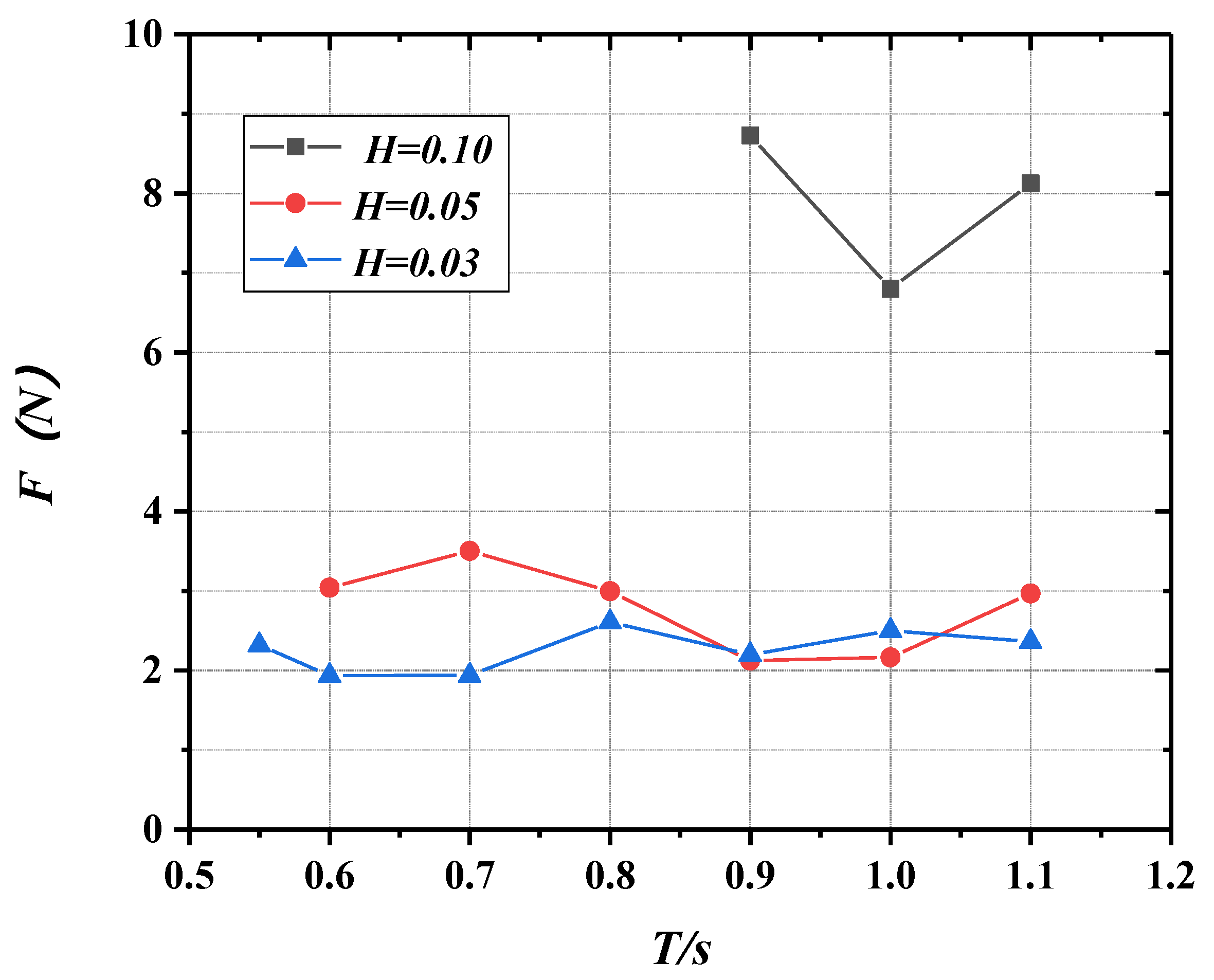
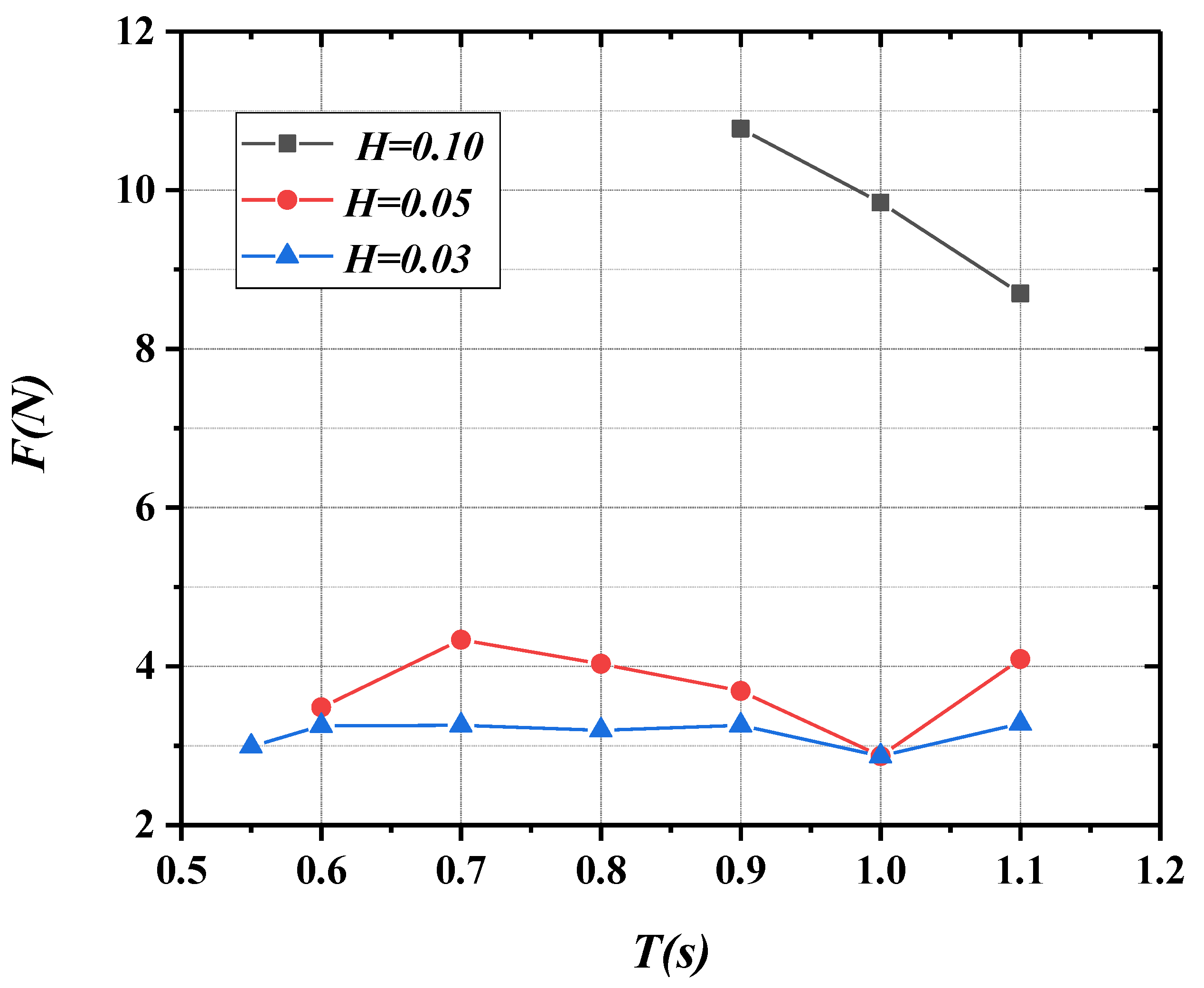
- The peak mooring forces on the windward side were greater than those on the leeward side. Under the influence of the aggregation and superposition of reflected waves on both sides of the reefs, the peak mooring forces in the middle position of the floating breakwater system were the largest at large wave height.
- (5)
- Affected by the mooring radius, the stiffness of the mooring line at the reefs is larger, which leads to greater stress on the mooring line. In the process of mooring system design, attention should be paid to prevent the phenomenon of breaking.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Christensen, E.D.; Bingham, H.B.; Friis, A.P.S.; Larsen, A.K.; Jensen, K.L. An experimental and numerical study of floating breakwaters. Coast. Eng. 2018, 137, 43–58. [Google Scholar] [CrossRef]
- Zhang, X.S.; Ma, S.; Duan, W.Y. A new L type floating breakwater derived from vortex dissipation simulation. Ocean Eng. 2018, 164, 455–464. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, M.; Gao, Z.; Xu, T.; Guo, W.; Ji, X.; Yuan, C. Experimental investigation on hydrodynamic effectiveness of a water ballast type floating breakwater. Ocean Eng. 2018, 167, 77–94. [Google Scholar] [CrossRef]
- Cho, I.H. Transmission coefficients of a floating rectangular breakwater with porous side plates. Int. J. Nav. Arch. Ocean 2016, 8, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.J.; Wang, Y.X.; Dong, H.Y.; Zheng, B.X. Time-domain hydrodynamic analysis of pontoon-plate floating breakwater. Water Sci. Eng. 2012, 5, 291–303. [Google Scholar]
- He, F.; Huang, Z.H.; Law, A.W.K. Hydrodynamic performance of a rectangular floating breakwater with and without pneumatic chambers: An experimental study. Ocean Eng. 2012, 51, 16–27. [Google Scholar] [CrossRef]
- Wang, H.Y.; Sun, Z.C. Experimental study of a porous floating breakwater. Ocean Eng. 2010, 37, 520–527. [Google Scholar] [CrossRef]
- Dong, G.H.; Zheng, Y.N.; Li, Y.C.; Teng, B.; Guan, C.T.; Lin, D.F. Experiments on wave transmission coefficients of floating breakwaters. Ocean Eng. 2008, 35, 931–938. [Google Scholar] [CrossRef]
- Elchahal, G.; Younes, R.; Lafon, P. The effects of reflection coefficient of the harbour sidewall on the performance of floating breakwaters—ScienceDirect. Ocean Eng. 2008, 35, 1102–1112. [Google Scholar] [CrossRef]
- Ji, C.Y.; Chen, X.; Cui, J.; Oleg, G.; Incecik, A. Experimental study on configuration optimization of floating breakwaters. Ocean Eng. 2016, 117, 302–310. [Google Scholar] [CrossRef] [Green Version]
- Ji, C.Y.; Chen, X.; Cui, J.; Yuan, Z.M.; Incecik, A. Experimental study of a new type of floating breakwater. Ocean Eng. 2015, 105, 295–303. [Google Scholar] [CrossRef] [Green Version]
- Ji, C.Y.; Guo, Y.C.; Cui, J.; Yuan, Z.M.; Ma, X.J. 3d experimental study on a cylindrical floating breakwater system. Ocean Eng. 2016, 125, 38–50. [Google Scholar] [CrossRef] [Green Version]
- Ji, C.Y.; Cheng, Y.; Yang, K.; Oleg, G. Numerical and experimental investigation of hydrodynamic performance of a cylindrical dual pontoon-net floating breakwater. Coast. Eng. 2017, 129, 1–16. [Google Scholar] [CrossRef]
- Ji, C.Y.; Deng, X.K.; Cheng, Y. An experimental study of double-row floating breakwaters. J. Mar. Sci. Tech. 2018, 24, 359–371. [Google Scholar] [CrossRef]
- He, F.; Huang, Z.H.; Law, A.W.K. An experimental study of a floating breakwater with asymmetric pneumatic chambers for wave energy extraction. Appl. Energ. 2013, 106, 222–231. [Google Scholar] [CrossRef]
- Loukogeorgaki, E.; Lentsiou, E.N.; Aksel, M.; Yagci, O. Experimental investigation of the hydroelastic and the structural response of a moored pontoon-type modular floating breakwater with flexible connectors. Coast. Eng. 2017, 121, 240–254. [Google Scholar] [CrossRef]
- Loukogeorgaki, E.; Yagci, O.; Kabdasli, M.S. 3D Experimental investigation of the structural response and the effectiveness of a moored floating breakwater with flexibly connected modules. Coast. Eng. 2014, 91, 164–180. [Google Scholar] [CrossRef]
- Gesraha, M.R. Analysis of Π shaped floating breakwater in oblique waves: I. Impervious rigid wave boards. Appl. Ocean Res. 2006, 28, 327–338. [Google Scholar] [CrossRef]
- Sannasiraj, S.A.; Sundar, V.; Sundaravadivelu, R. Mooring forces and motion responses of pontoon-type floating breakwaters. Ocean Eng. 1998, 25, 27–48. [Google Scholar] [CrossRef]
- Najafi-Jilani, A.; Rezaie-Mazyak, A. Numerical investigation of floating breakwater movement using SPH method. Int. J. Nav. Arch. Ocean 2011, 3, 122–125. [Google Scholar] [CrossRef] [Green Version]
- Ji, C.Y.; Cheng, Y.; Cui, J.; Yuan, Z.M.; Oleg, G. Hydrodynamic performance of floating breakwaters in long wave regime: An experimental study. Ocean Eng. 2018, 152, 154–166. [Google Scholar] [CrossRef] [Green Version]
- Mane, V.; Rajappa, S.; Rao, S.; Vittal, H.A. Peak mooring forces in the horizontal interlaced multi-layered moored floating pipe breakwater. Int. J. Nav. Arch. Ocean 2011, 3, 150–158. [Google Scholar] [CrossRef] [Green Version]
- Hegde, A.V.; Kamath, K.; Deepak, J.C. Mooring forces in horizontal interlaced moored floating pipe breakwater with three layers. Ocean Eng. 2008, 35, 165–173. [Google Scholar] [CrossRef]
- Liang, N.K.; Huang, J.S.; Li, C.F. A study of spar buoy floating breakwater. Ocean Eng. 2004, 31, 43–60. [Google Scholar] [CrossRef]
- Martinelli, L.; Ruol, P.; Zanuttigh, B. Wave basin experiments on floating breakwaters with different layouts. Appl. Ocean Res. 2008, 30, 199–207. [Google Scholar] [CrossRef]
- Loukogeorgaki, E.; Angelides, D.C. Stiffness of mooring lines and performance of floating breakwater in three dimensions. Appl. Ocean Res. 2005, 27, 187–208. [Google Scholar] [CrossRef]
- Jeong, K.L.; Lee, Y.G. Numerical simulations of two-dimensional floating breakwaters in regular waves using fixed cartesian grid. Int. J. Nav. Arch. Ocean 2014, 6, 206–218. [Google Scholar] [CrossRef] [Green Version]
- Goda, Y.; Suzuki, Y. Estimation of incident and reflected waves in random wave experiments. In Proceedings of the 15th International Conference on Coastal Engineering, Honolulu, HI, USA, 11–17 July 1976; Volume 4, p. 73. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Unit | Value |
|---|---|---|---|
| Length | L | m | 0.8 |
| Breadth | B | m | 0.308 |
| Height | D | m | 0.068 |
| Draft | T | m | 0.034 |
| Mass | MT | kg | 5.195 |
| Roll inertia | IXX | kg·m2 | 0.055 |
| Pitch inertia | IYY | kg·m2 | 0.365 |
| Yaw inertia | IZZ | kg·m2 | 0.416 |
| Pontoon diameter | d | m | 0.06 |
| Material | Diameter (mm) | The Submerged Weight per Unit Length (g/m) | Axial Rigidity (N) |
|---|---|---|---|
| Polyester cable | 2.4 | 0 | 195.12 |
| Chains | 1.74 | 61.27 | 3941.46 |
| Number | Material | Length (m) |
|---|---|---|
| 2–8, 11–17 | polyester | 0.896 |
| polyester | 0.896 | |
| Chains | 1.402 | |
| 18 | polyester + Chains | 0.3 + 0.344 |
| 1 | polyester + Chains | 0.4 + 0.632 |
| 10 | polyester + Chains | 0.5 + 0.68 |
| 9 | polyester + Chains | 0.4 + 0.526 |
| Number | Fairlead Coordinates | Anchor Point Coordinates | ||||
|---|---|---|---|---|---|---|
| x (m) | y (m) | z (m) | x (m) | y (m) | z (m) | |
| 2 | −2.525 | 0.154 | 0 | −2.49 | 2.354 | −0.5 |
| −2.455 | 0.154 | 0 | −2.49 | 2.354 | −0.5 | |
| 3 | −1.695 | 0.154 | 0 | −1.66 | 2.354 | −0.5 |
| −1.625 | 0.154 | 0 | −1.66 | 2.354 | −0.5 | |
| 4 | −0.865 | 0.154 | 0 | −0.83 | 2.354 | −0.5 |
| −0.795 | 0.154 | 0 | −0.83 | 2.354 | −0.5 | |
| 5 | −0.035 | 0.154 | 0 | 0 | 2.354 | −0.5 |
| 0.035 | 0.154 | 0 | 0 | 2.354 | −0.5 | |
| 6 | 0.795 | 0.154 | 0 | 0.83 | 2.354 | −0.5 |
| 0.865 | 0.154 | 0 | 0.83 | 2.354 | −0.5 | |
| 7 | 1.625 | 0.154 | 0 | 1.66 | 2.354 | −0.5 |
| 1.695 | 0.154 | 0 | 1.66 | 2.354 | −0.5 | |
| 8 | 2.455 | 0.154 | 0 | 2.49 | 2.354 | −0.5 |
| 2.525 | 0.154 | 0 | 2.49 | 2.354 | −0.5 | |
| 17 | −2.525 | −0.154 | 0 | −2.49 | −1.954 | −0.5 |
| −2.455 | −0.154 | 0 | −2.49 | −1.954 | −0.5 | |
| 16 | −1.695 | −0.154 | 0 | −1.66 | −1.954 | −0.5 |
| −1.625 | −0.154 | 0 | −1.66 | −1.954 | −0.5 | |
| 15 | −0.865 | −0.154 | 0 | −0.83 | −1.954 | −0.5 |
| −0.795 | −0.154 | 0 | −0.83 | −1.954 | −0.5 | |
| 14 | −0.035 | −0.154 | 0 | 0 | −1.954 | −0.5 |
| 0.035 | −0.154 | 0 | 0 | −1.954 | −0.5 | |
| 13 | 0.795 | −0.154 | 0 | 0.83 | −1.954 | −0.5 |
| 0.865 | −0.154 | 0 | 0.83 | −1.954 | −0.5 | |
| 12 | 1.625 | −0.154 | 0 | 1.66 | −1.954 | −0.5 |
| 1.695 | −0.154 | 0 | 1.66 | −1.954 | −0.5 | |
| 11 | 2.455 | −0.154 | 0 | 2.49 | −1.954 | −0.5 |
| 2.525 | −0.154 | 0 | 2.49 | −1.954 | −0.5 | |
| 18 | −3.305 | −0.12 | 0 | −3.555 | −0.622 | 0 |
| 1 | −3.305 | 0.12 | 0 | −3.775 | 0.934 | −0.5 |
| 10 | 3.305 | −0.12 | 0 | 4.018 | −1.027 | 0 |
| 9 | 3.305 | 0.12 | 0 | 4.031 | 0.676 | 0 |
| Number | Wave Height H (m) | Wave Period T (s) | Wave Incident Angle β (°) |
|---|---|---|---|
| A1–A7 | 0.03 | 0.55, 0.6, 0.7, 0.8, 0.9, 1.0, 1.1 | 90 |
| A8–A13 | 0.05 | 0.6, 0.7, 0.8, 0.9, 1.0, 1.1 | 90 |
| A14–A17 | 0.1 | 0.9, 1.0, 1.1 | 90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Zhang, Y.; Bian, X.; Xu, S. Hydrodynamic Performance of a Multi-Module Three-Cylinder Floating Breakwater System under the Influence of Reefs: A 3D Experimental Study. J. Mar. Sci. Eng. 2021, 9, 1364. https://doi.org/10.3390/jmse9121364
Guo J, Zhang Y, Bian X, Xu S. Hydrodynamic Performance of a Multi-Module Three-Cylinder Floating Breakwater System under the Influence of Reefs: A 3D Experimental Study. Journal of Marine Science and Engineering. 2021; 9(12):1364. https://doi.org/10.3390/jmse9121364
Chicago/Turabian StyleGuo, Jianting, Yongbin Zhang, Xiangqian Bian, and Sheng Xu. 2021. "Hydrodynamic Performance of a Multi-Module Three-Cylinder Floating Breakwater System under the Influence of Reefs: A 3D Experimental Study" Journal of Marine Science and Engineering 9, no. 12: 1364. https://doi.org/10.3390/jmse9121364