
Study of the Operating Characteristics for the High-Speed Water Jet Pump Installed on the Underwater Vehicle with Different Cruising Speeds


Abstract
:1. Introduction
2. Numerical Approach
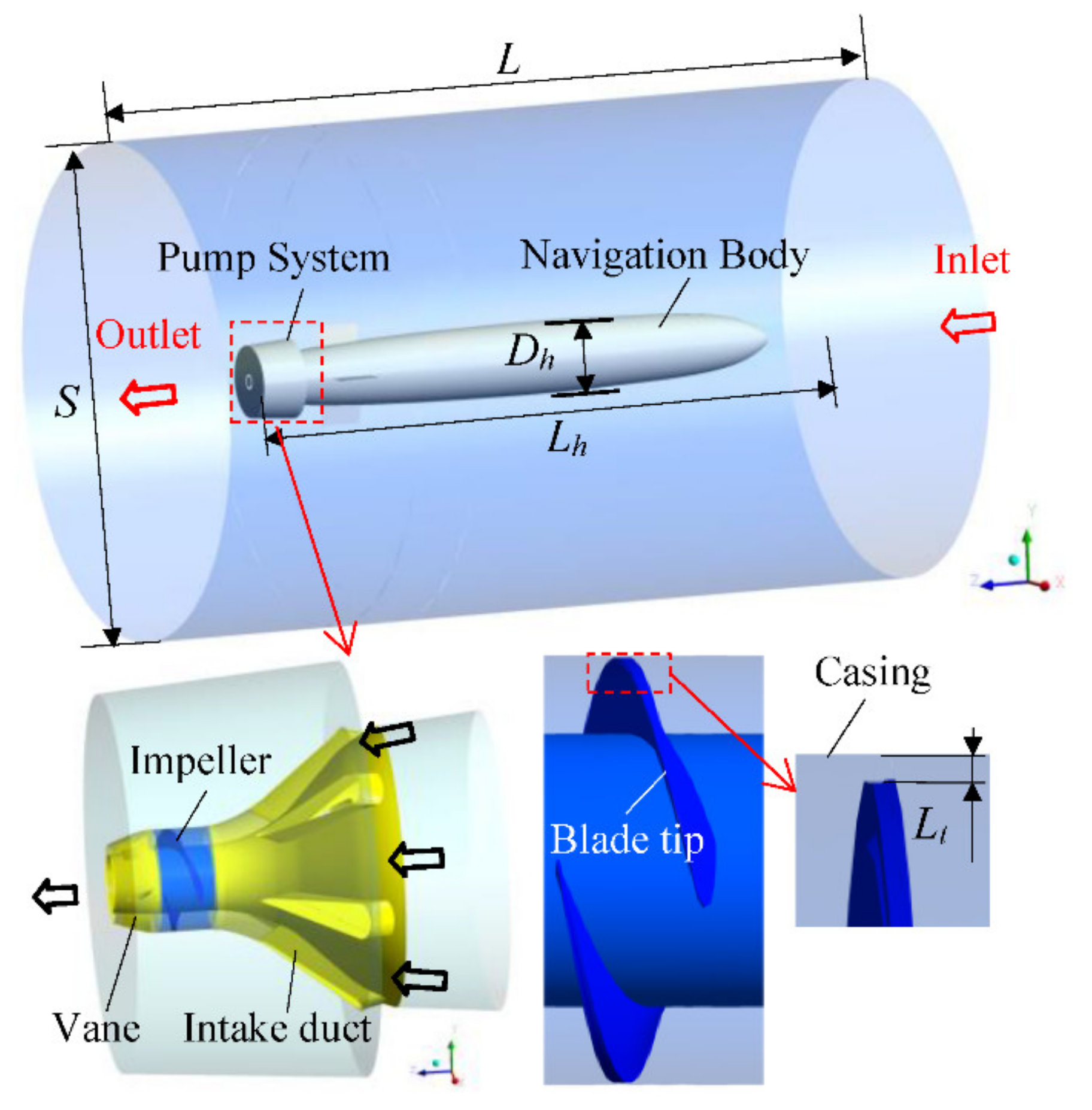
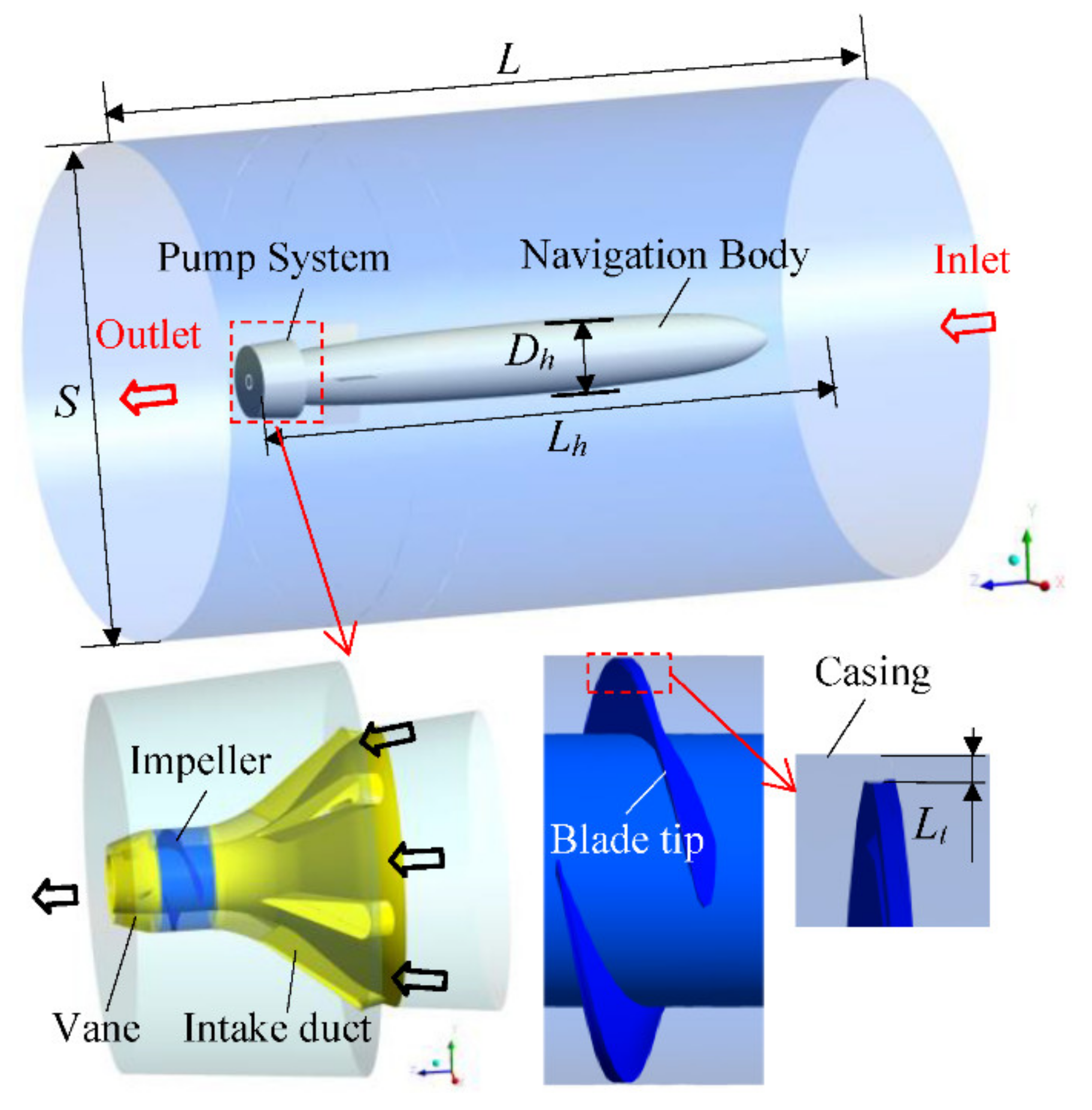
2.1. Computational Domain and Boundary Conditions
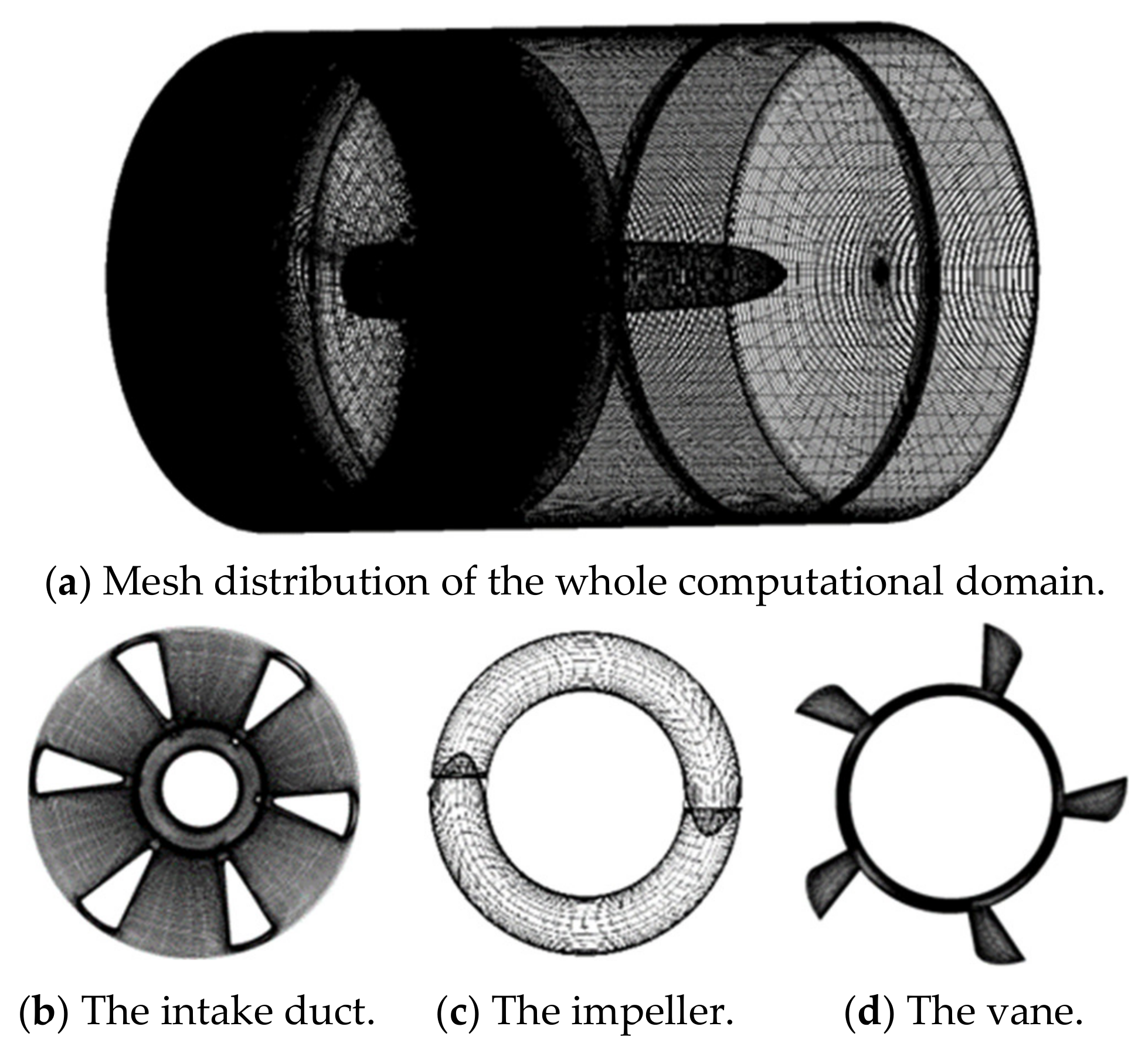
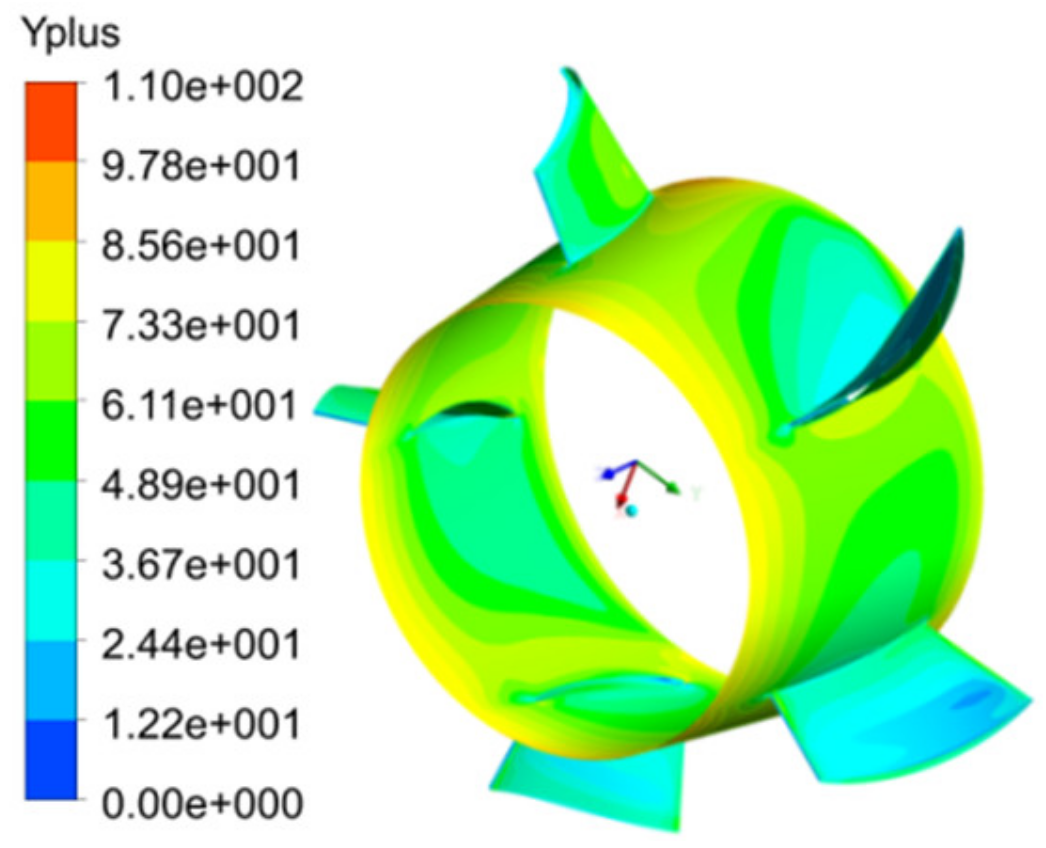
2.2. Mesh Generation
2.3. Numerical Settings and Its Validation
2.3.1. Basic Governing Equations
2.3.2. Basic Governing Equations
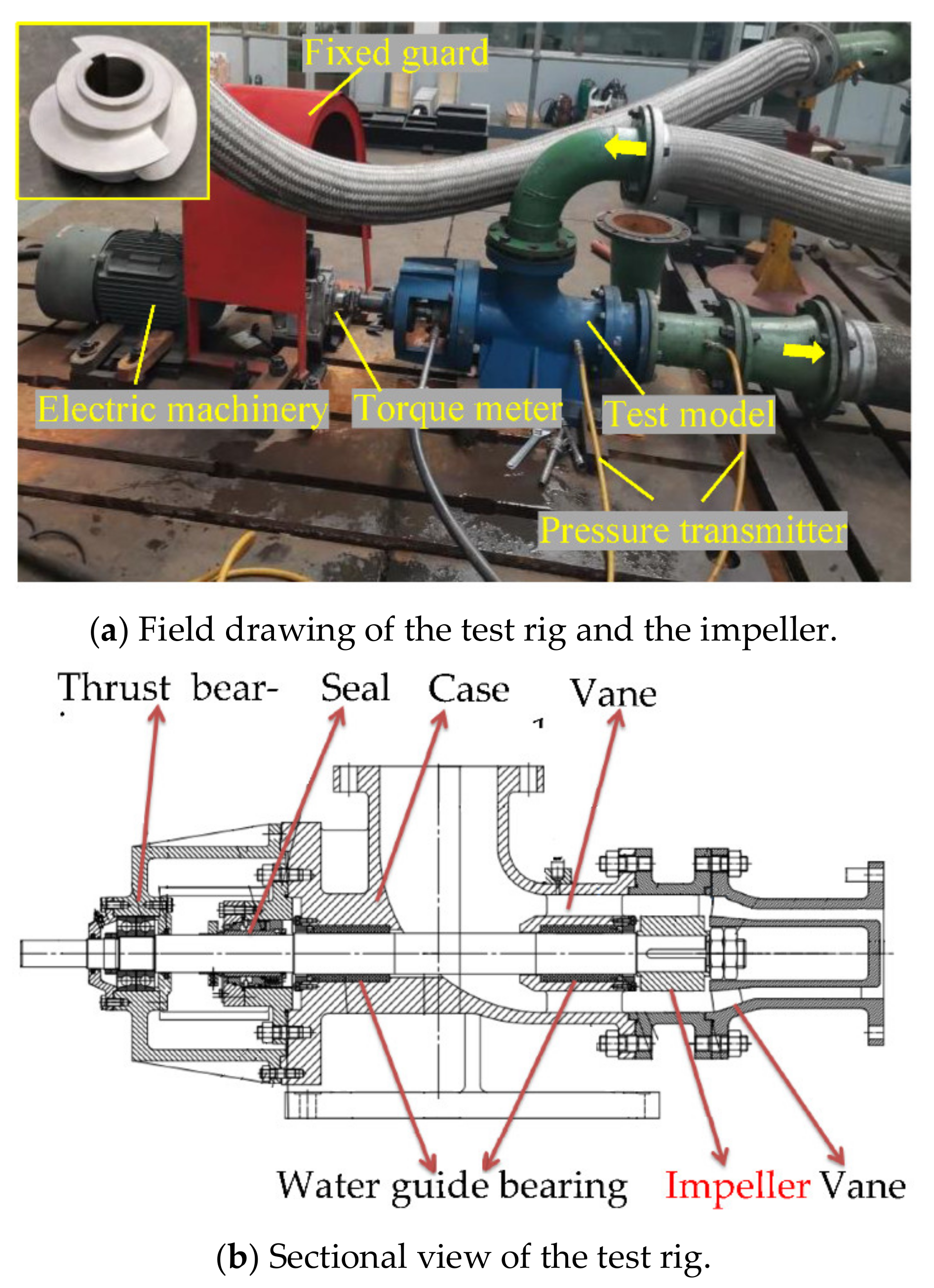
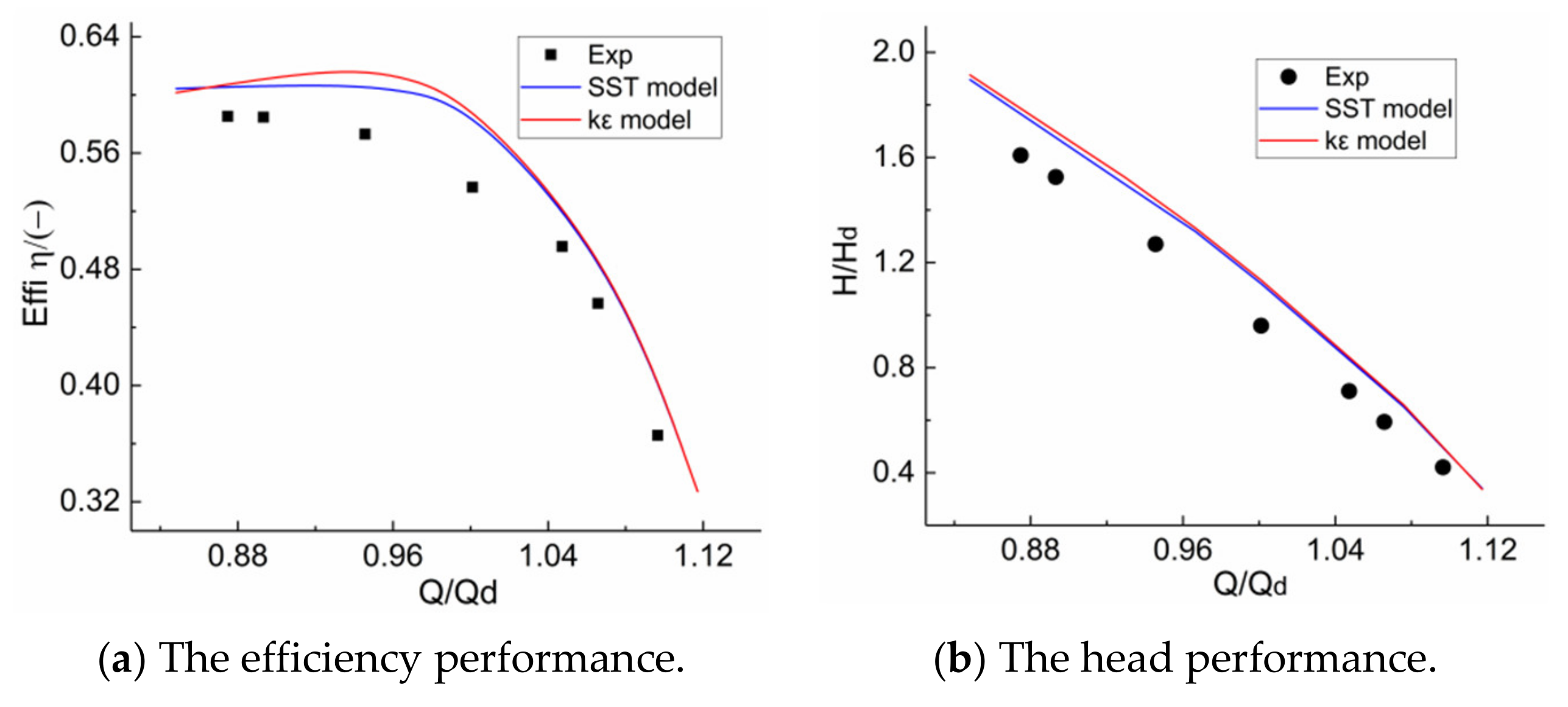
2.3.3. Validation of the Numerical Approach via the Speed Reduction Experiment
3. Results and Discussions
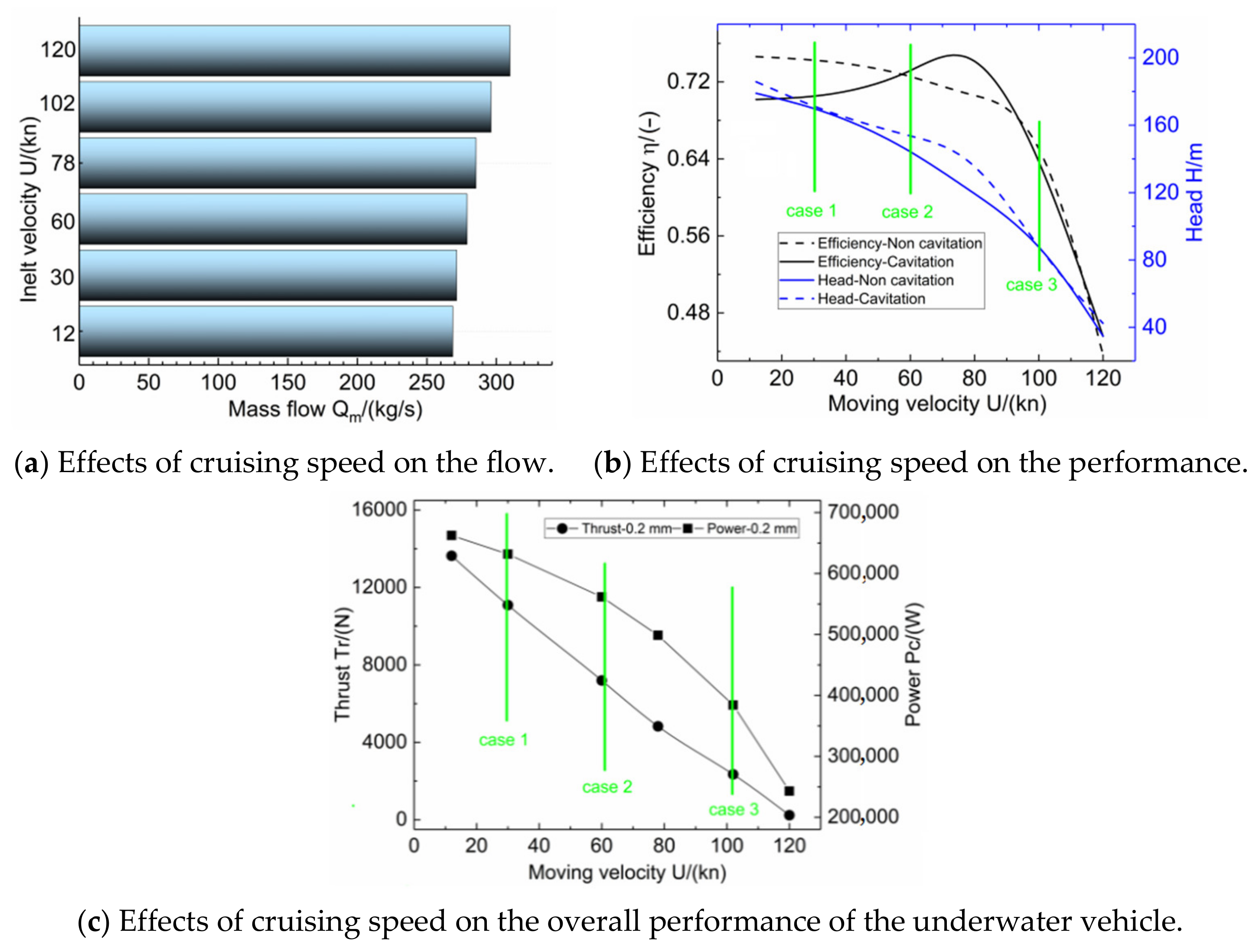
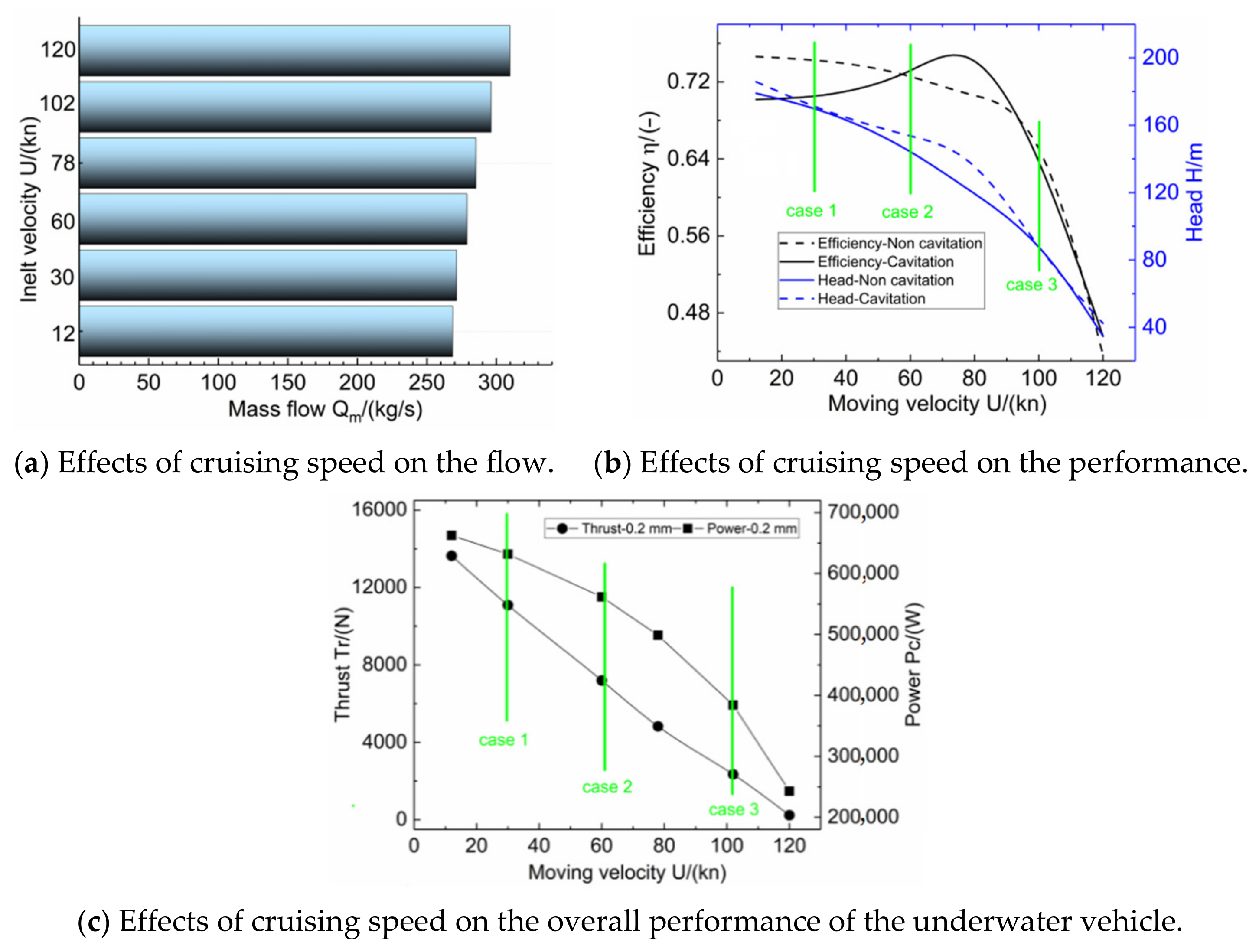
3.1. Effects of the Cruising Speed on the Overall Performances
3.2. Steady Evaluation of the Effects of the Cruising Speed on the Performances Based on the Energy Loss Theory
3.2.1. Study of the Energy Loss in the Pump System under Different Cruising Speeds
3.2.2. Statistical Analysis of the Inner Flow Characteristic of Key Hydraulic Component with the Highest Energy Losses
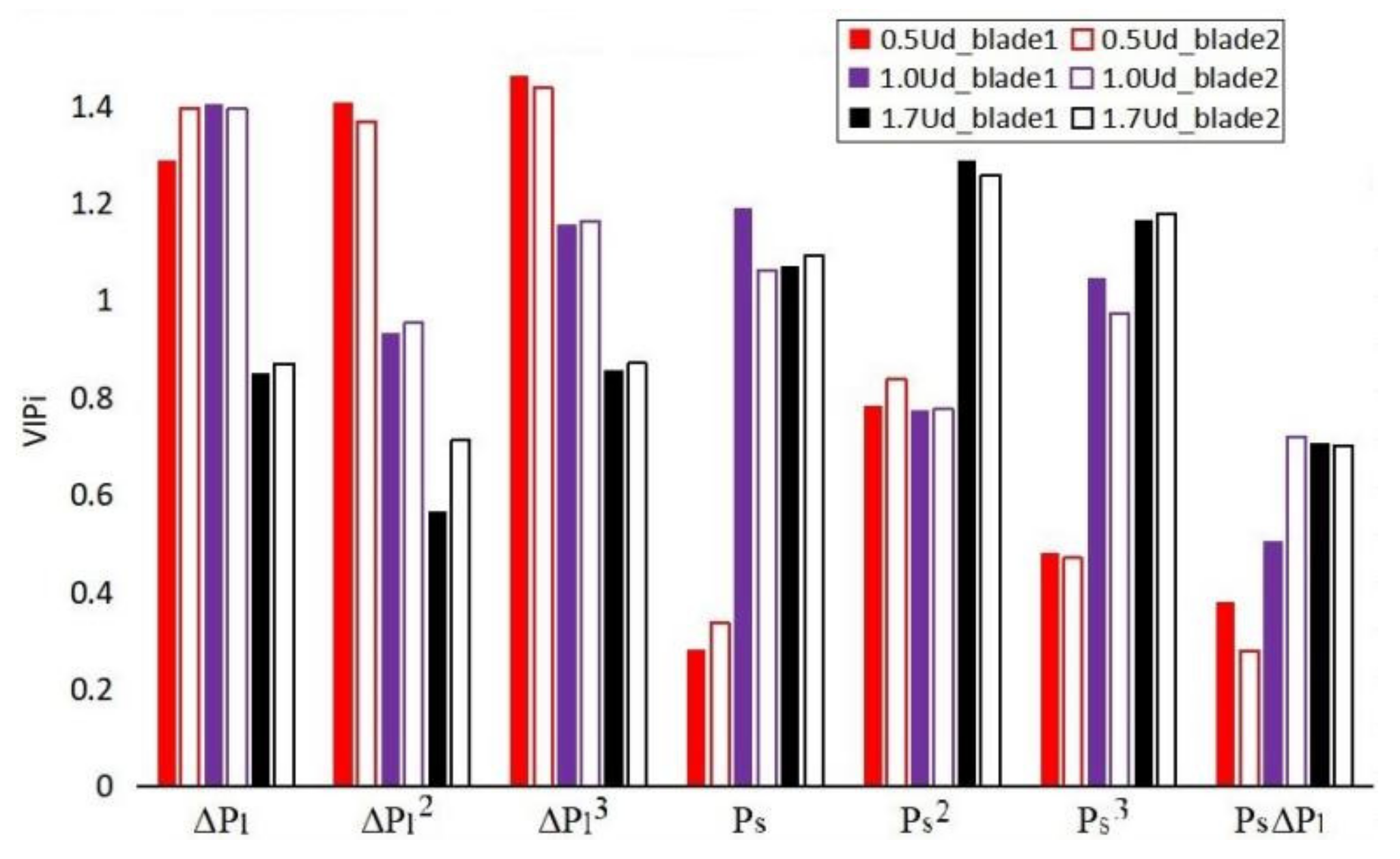
- Quantitative extraction of the typical factors
- Quantitative analysis with the statistical method
3.3. Unsteady Evaluation of the Effects of the Cruising Speed on the Hydraulic Components’ Performance
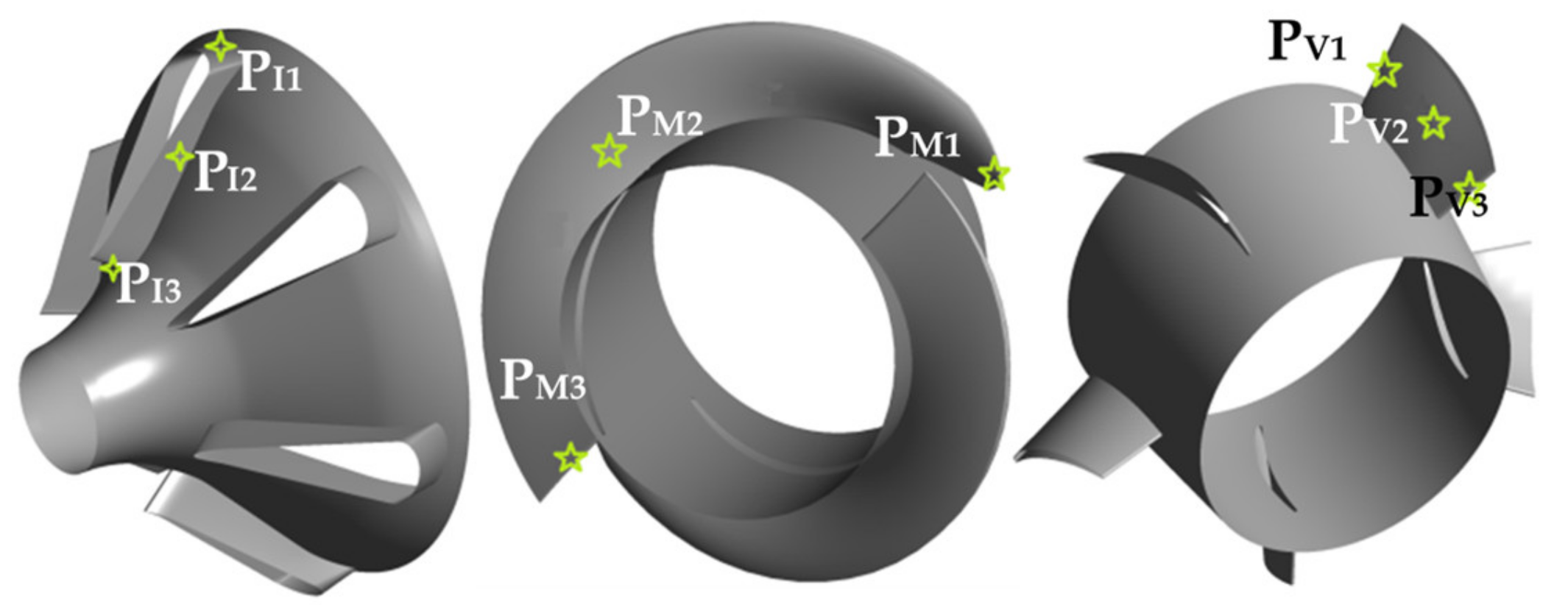
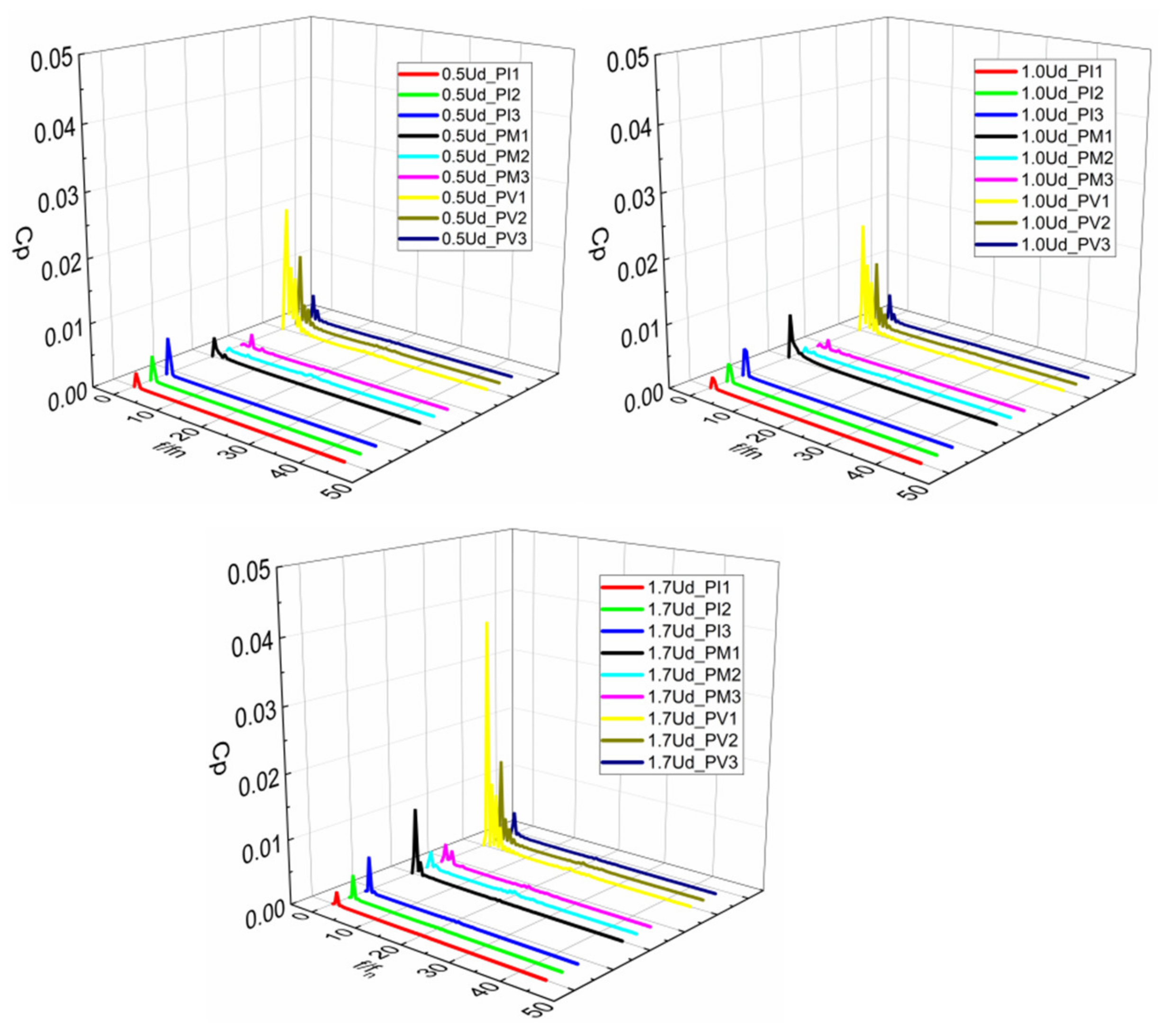
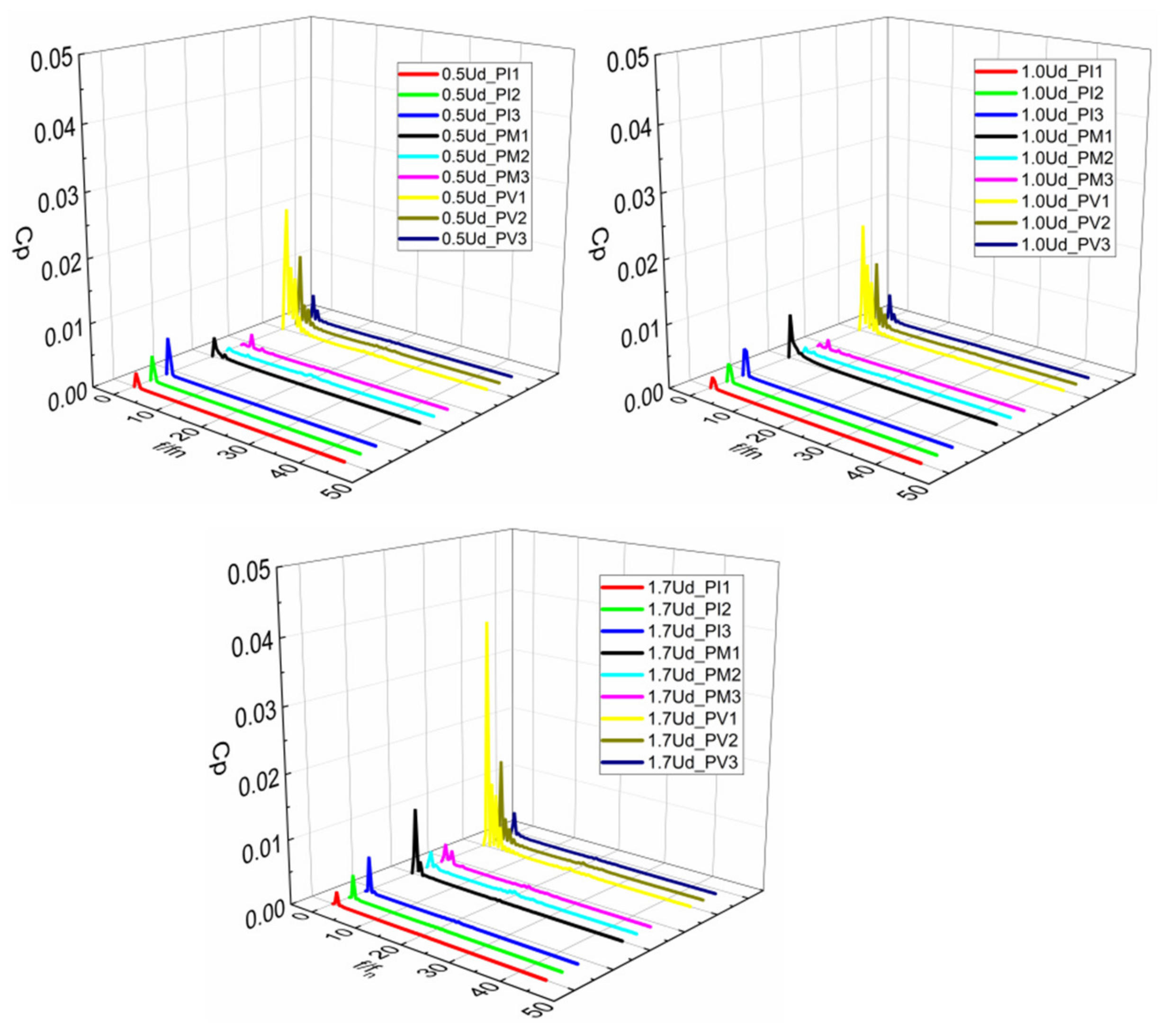
3.3.1. Pressure Pulsation Analysis
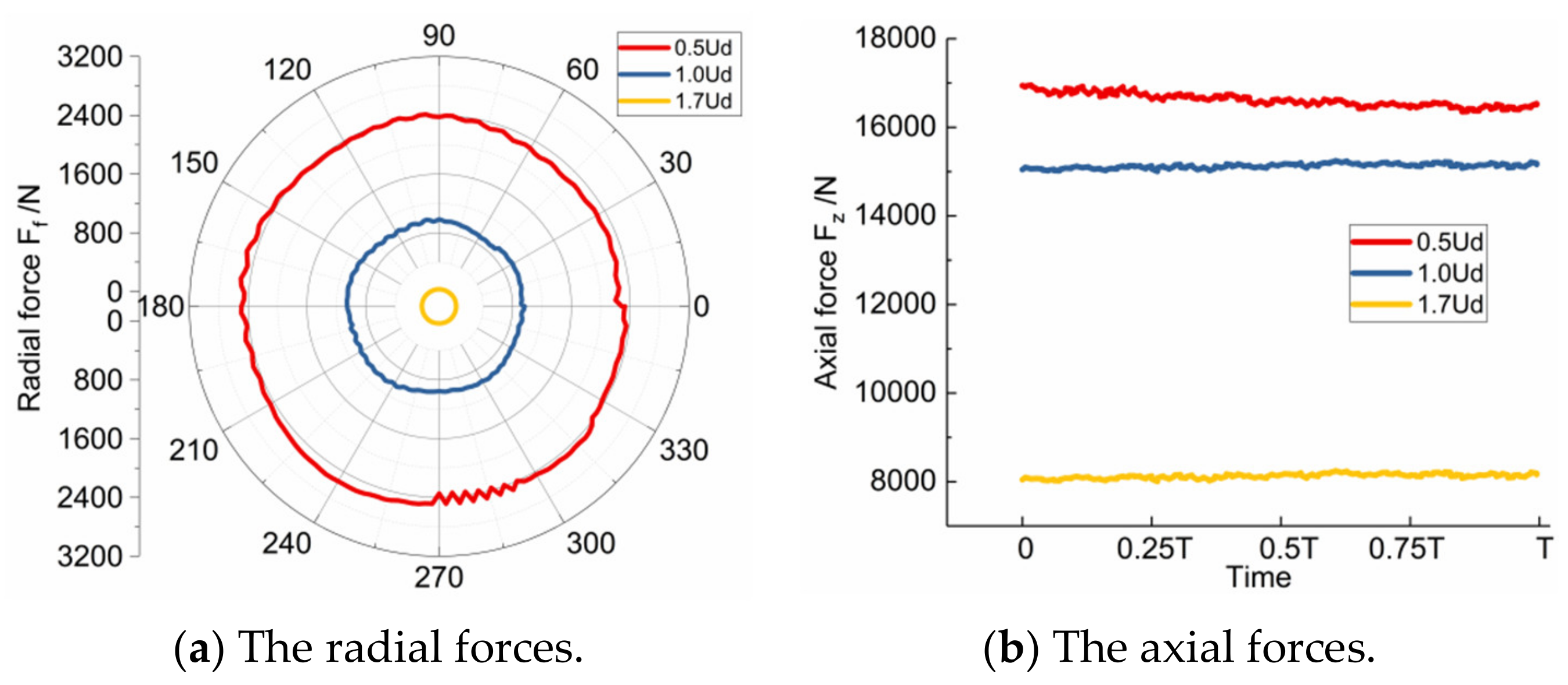
3.3.2. Radial and Axial Force Analysis
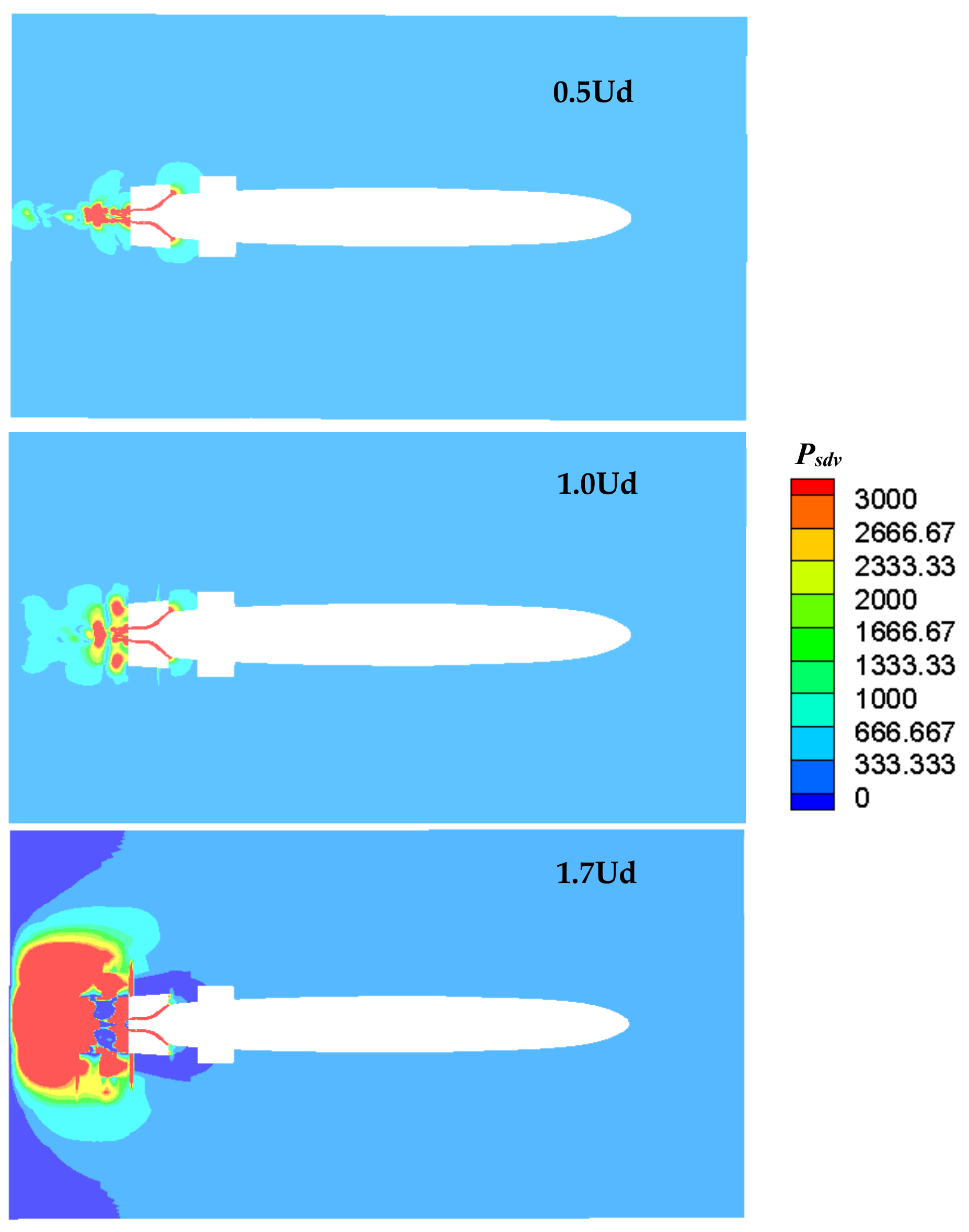
3.3.3. Cavitating Analysis
4. Conclusions
- (1)
- The overall performances influenced by the cruising speed were clarified. As the cruising speed of the underwater vehicle improved, the passing massflow into the pump system had the same increasing trend, while the performances comprised of the power, the thrust, the head, and efficiency decrease;
- (2)
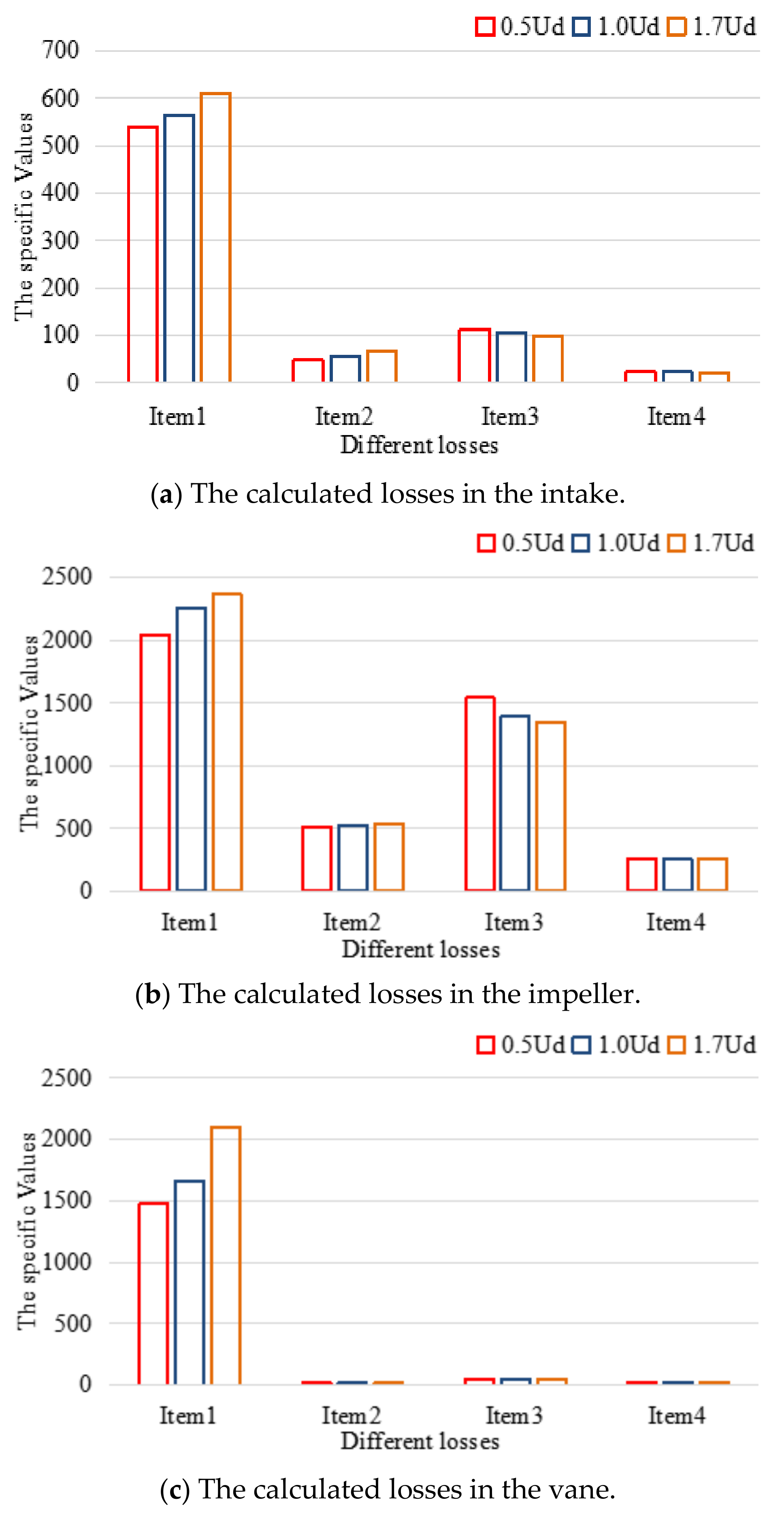
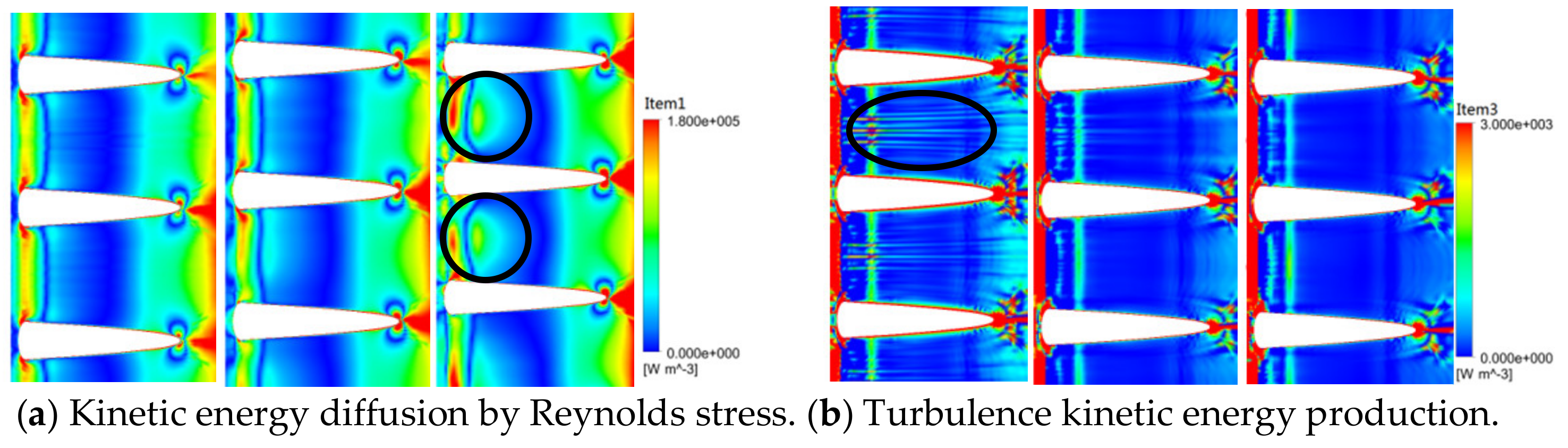
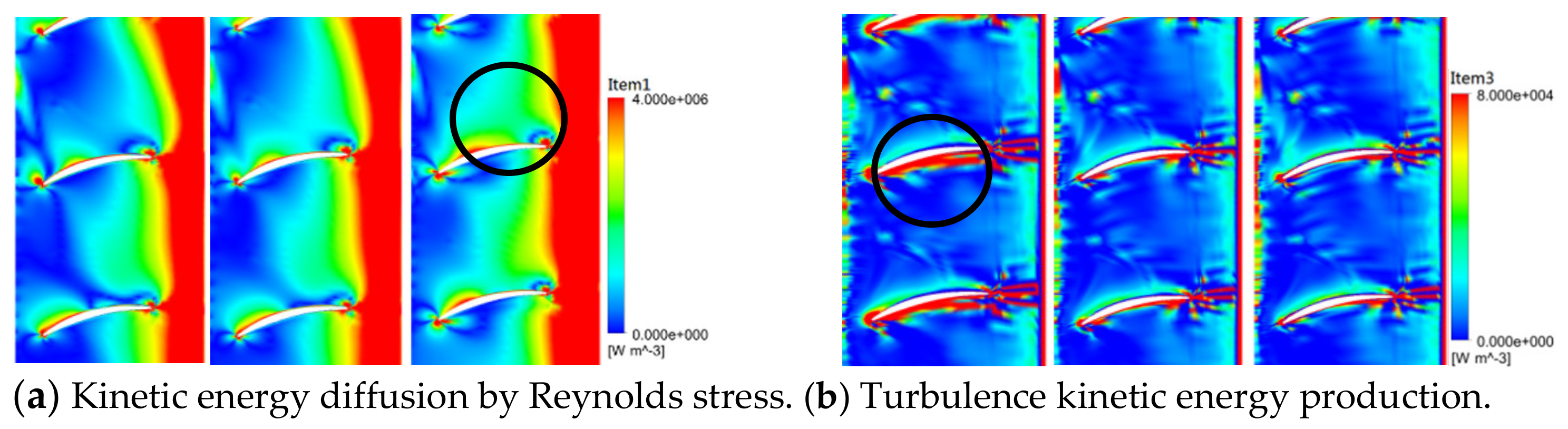
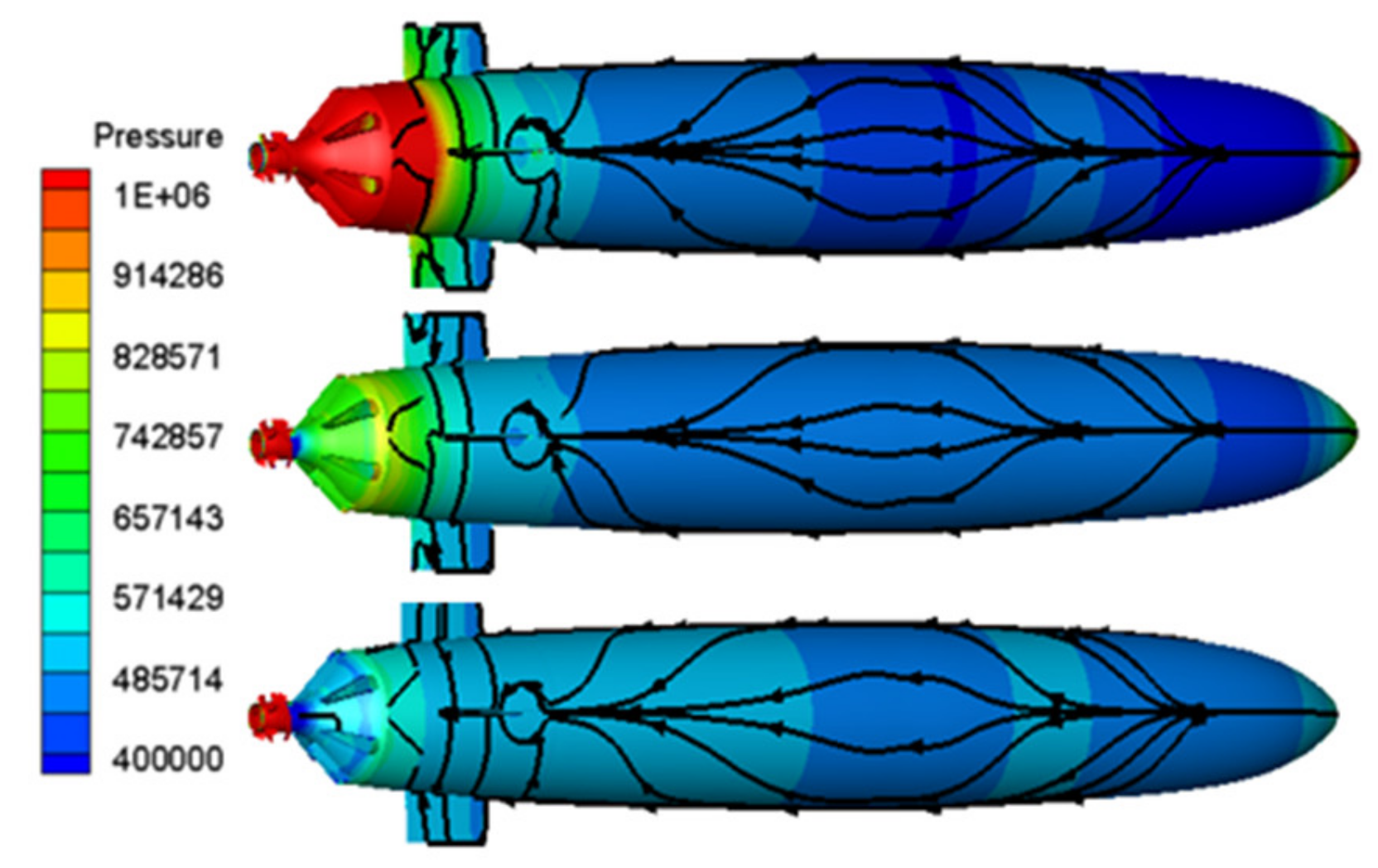
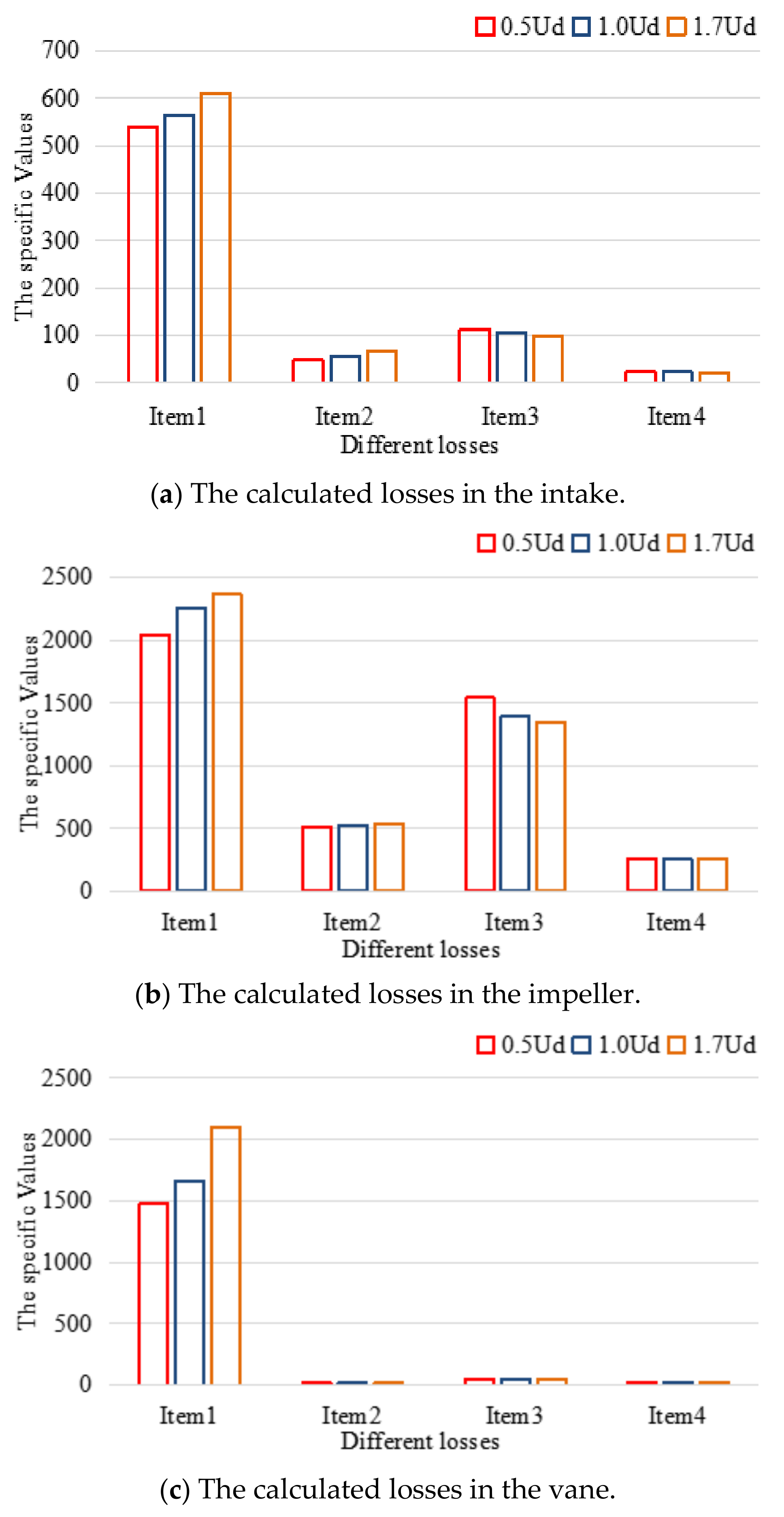
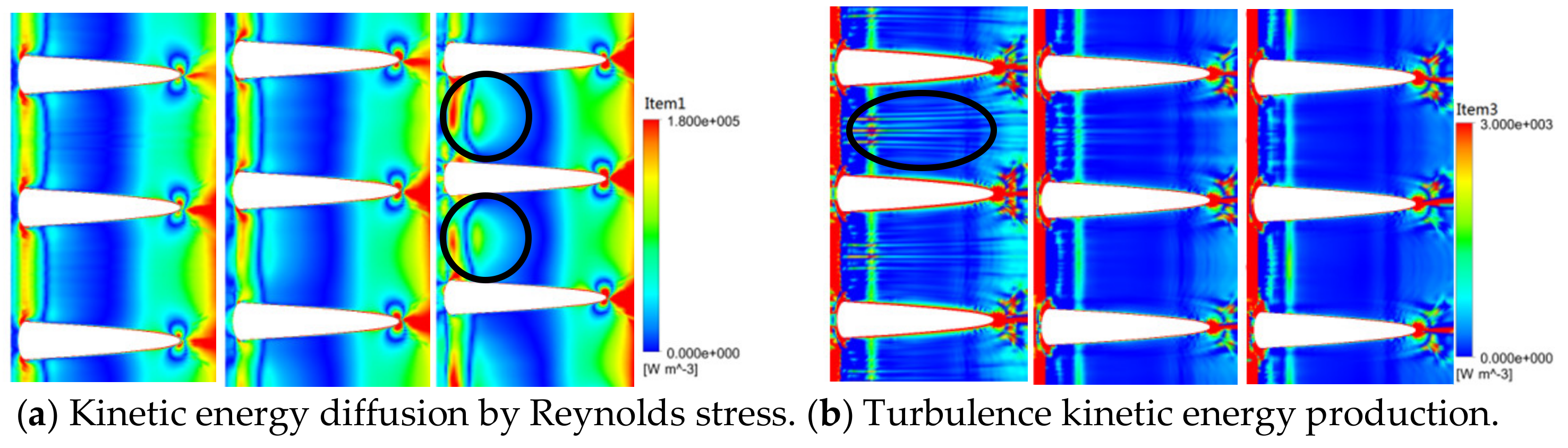
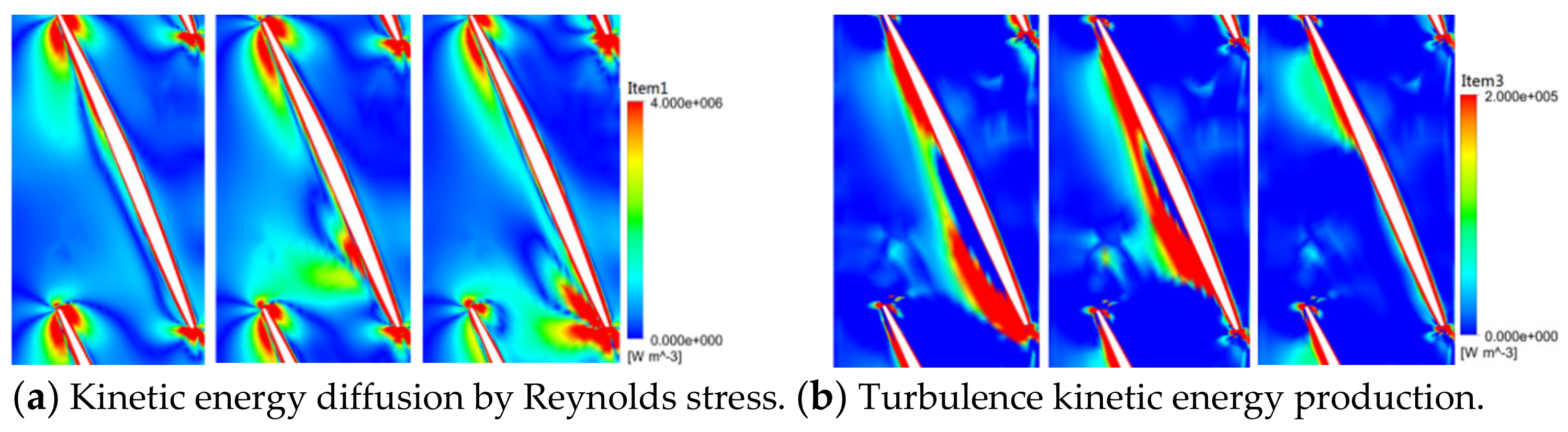
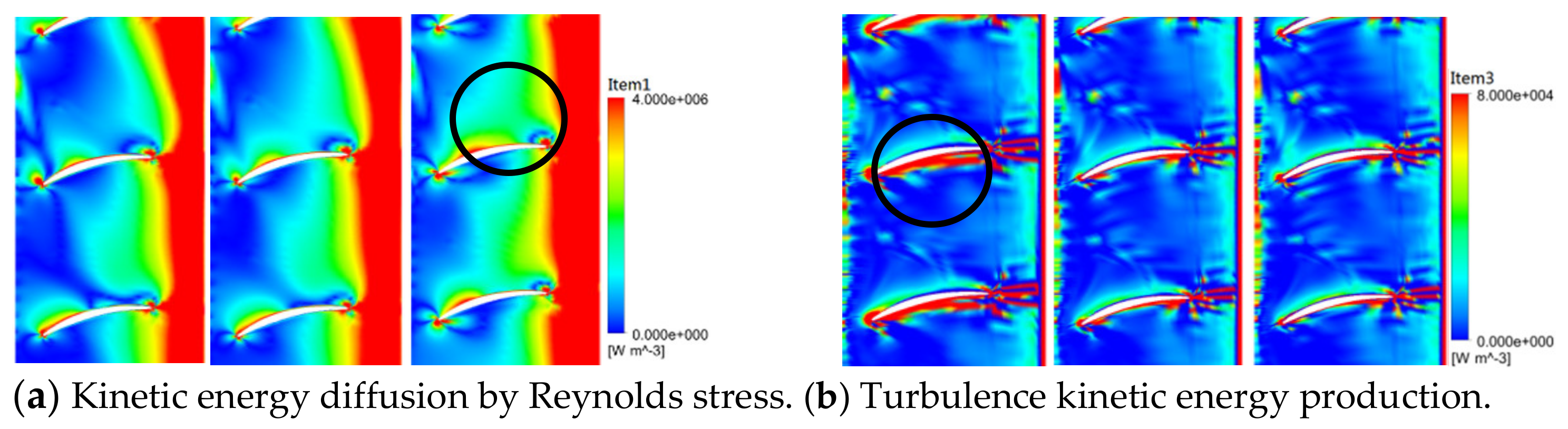
- Established on the energy balance equation, the energy losses influenced by the underwater vehicle’s cruising speed were investigated. The kinetic energy diffusion from the Reynolds stress (item 1) and viscous stress (item 2) presented an increasing trend along with the increase in the cruising speed, while the turbulent kinetic energy production (item 3) and the viscous dissipation (item 4) showed a completely opposite trend. Item 1 and item 3 were the main losses in the water jet pump, followed by items 2 and 4. In addition, of all the hydraulic components, the rotating impeller zone had the highest losses;
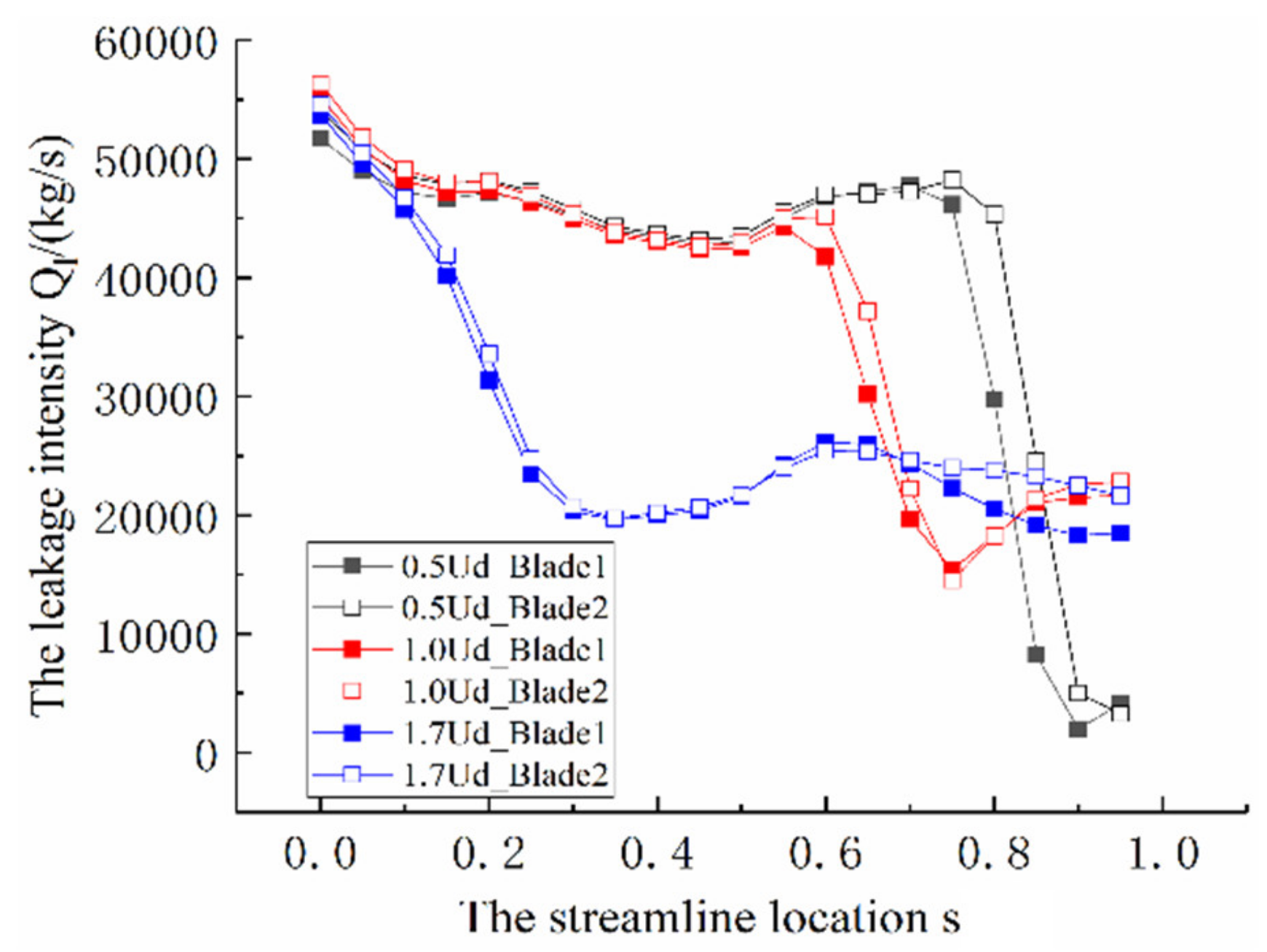
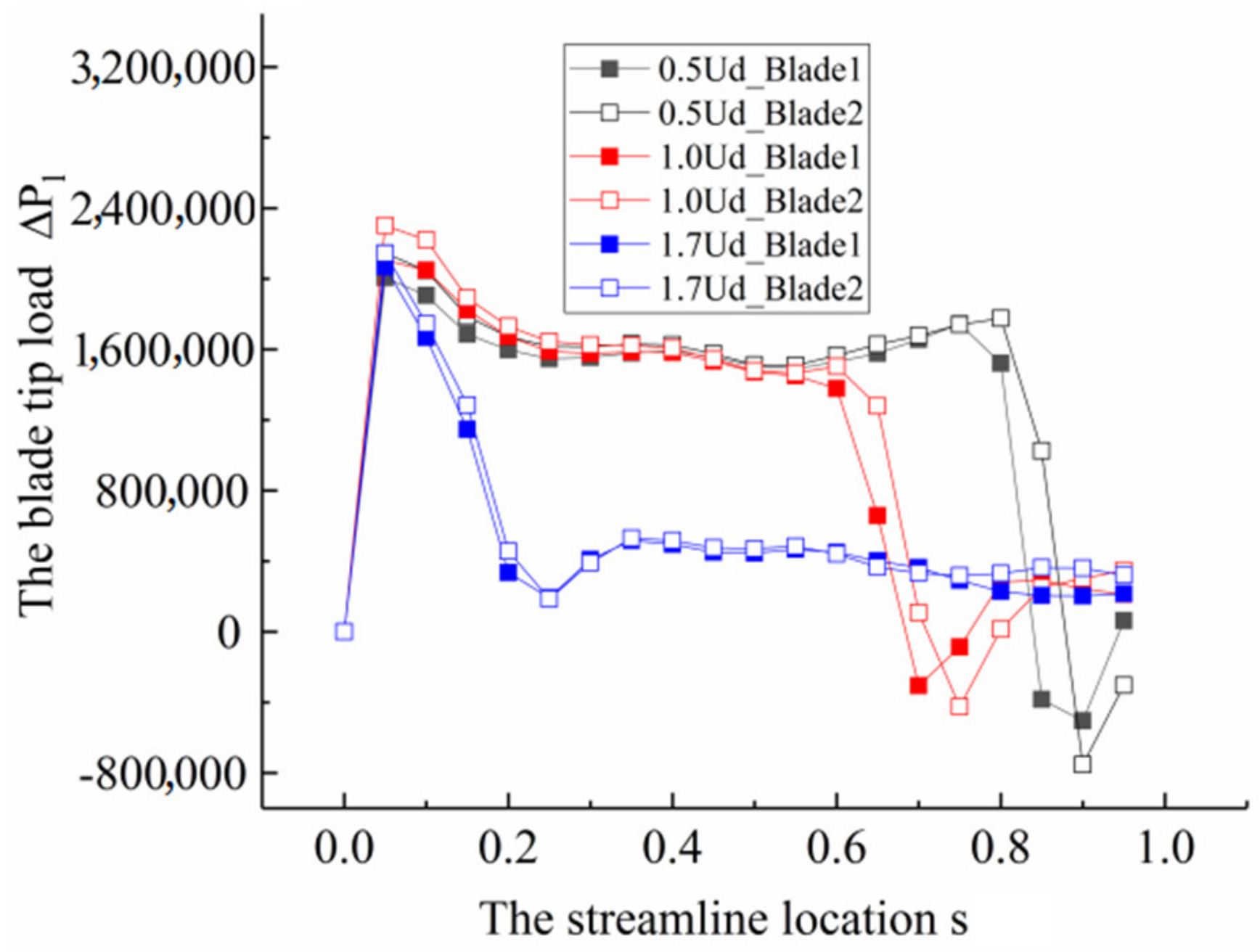
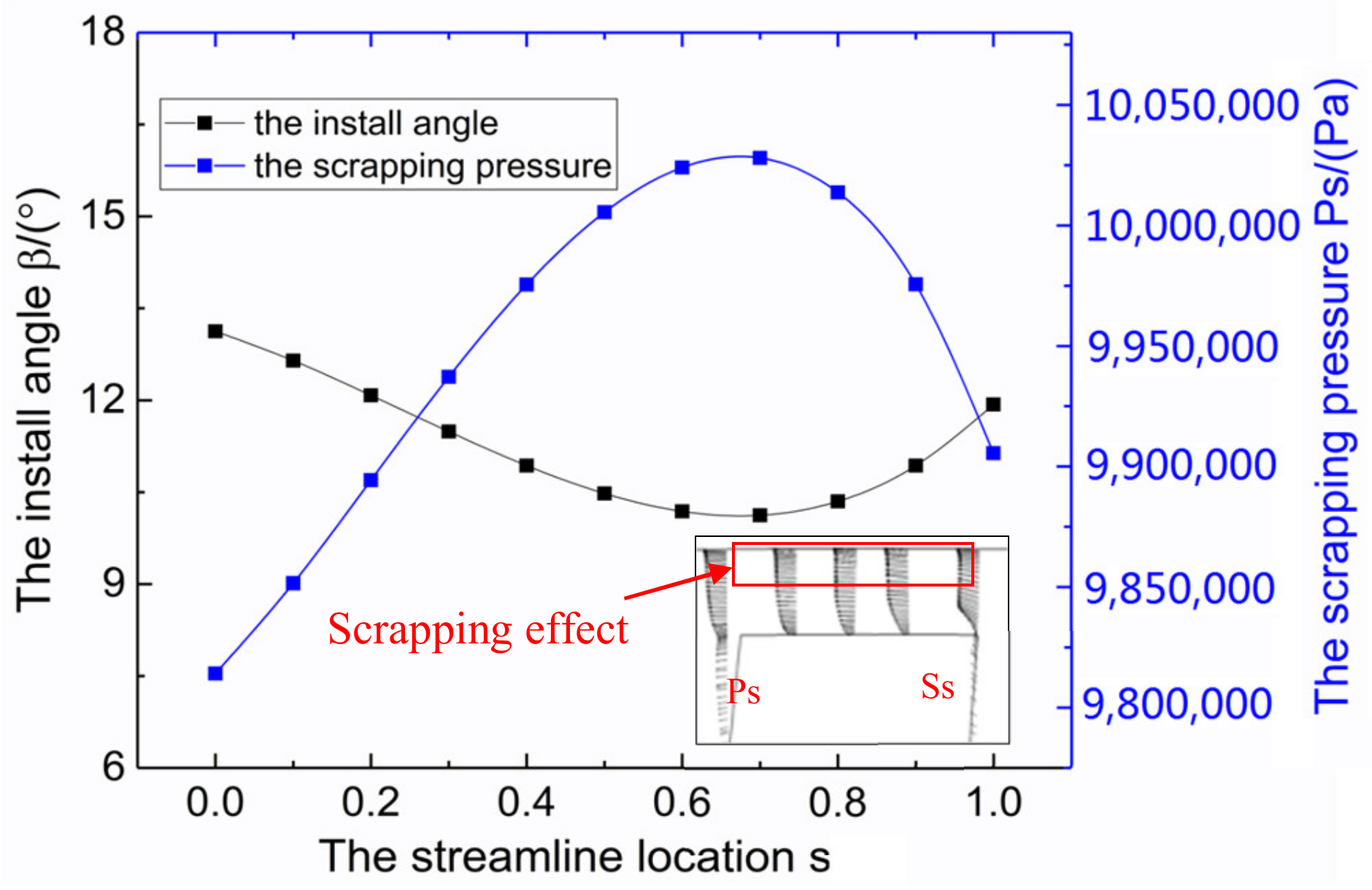
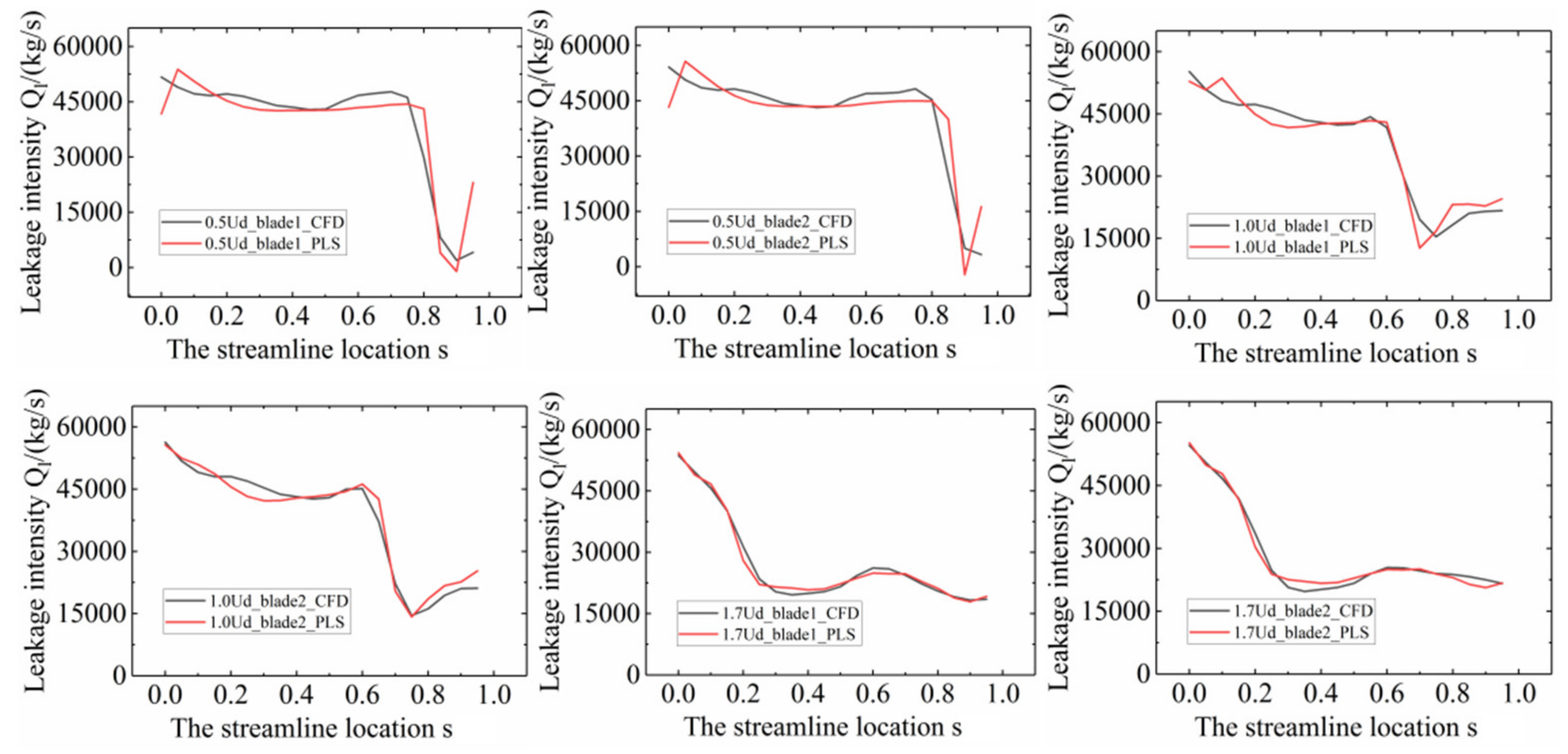
- (3)
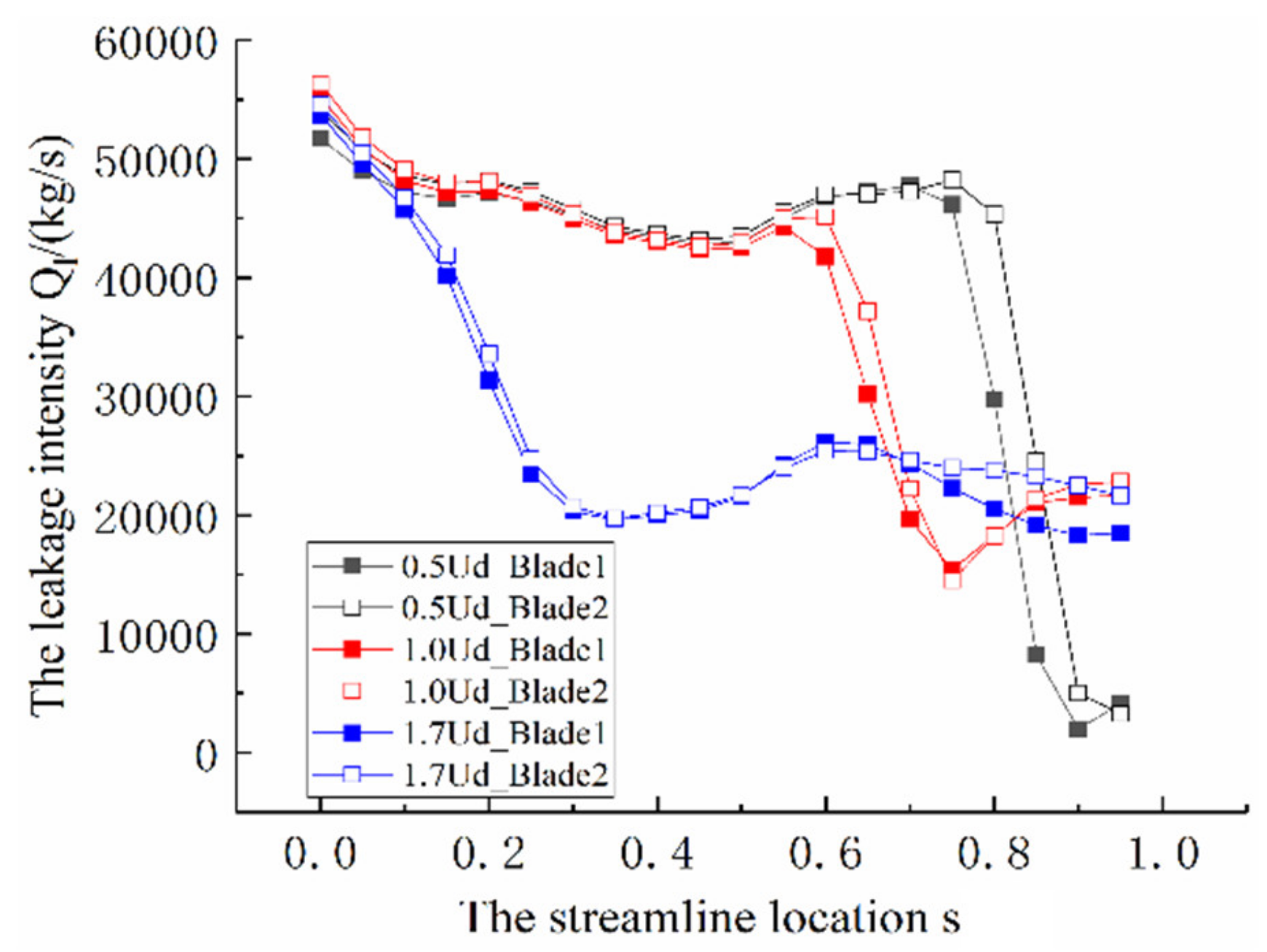
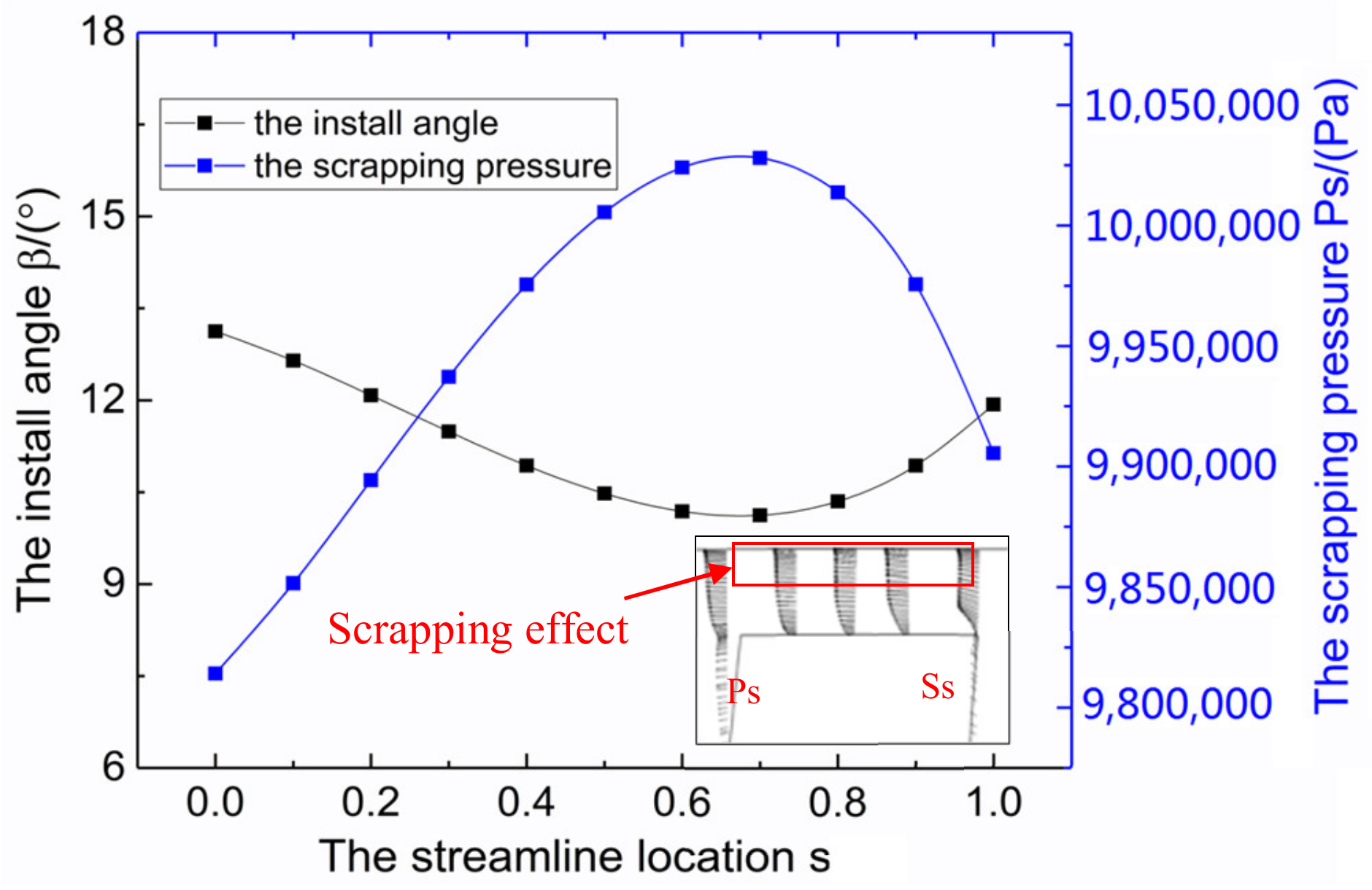
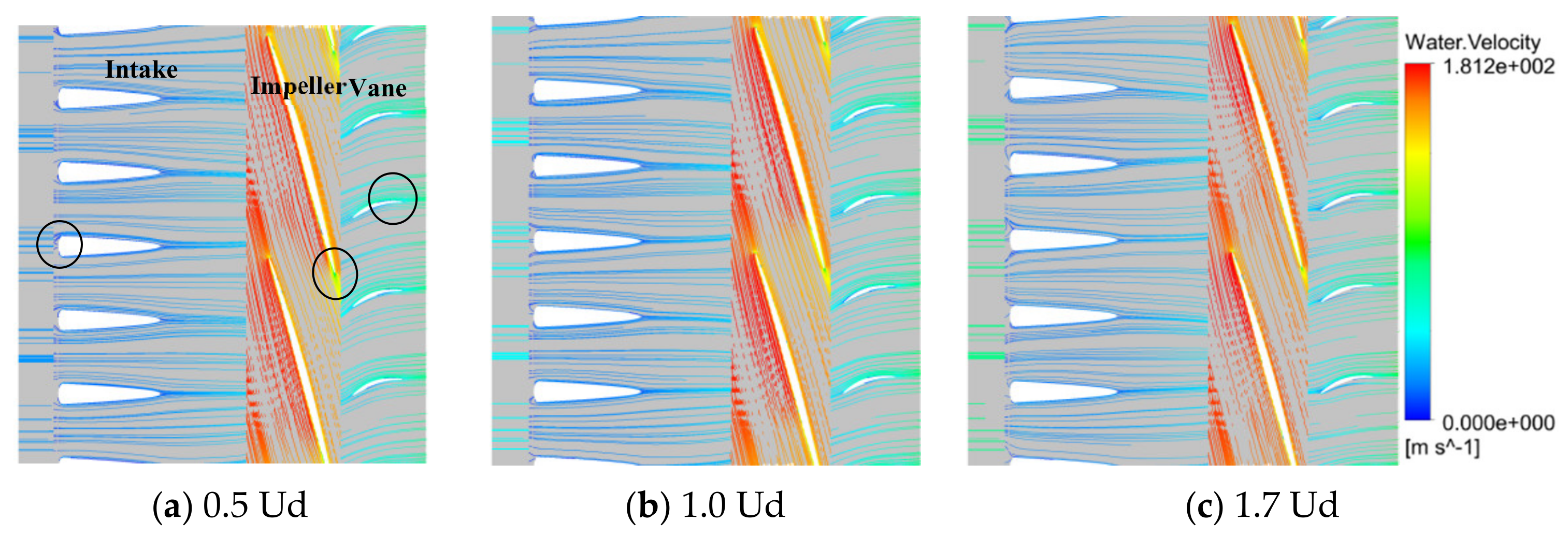
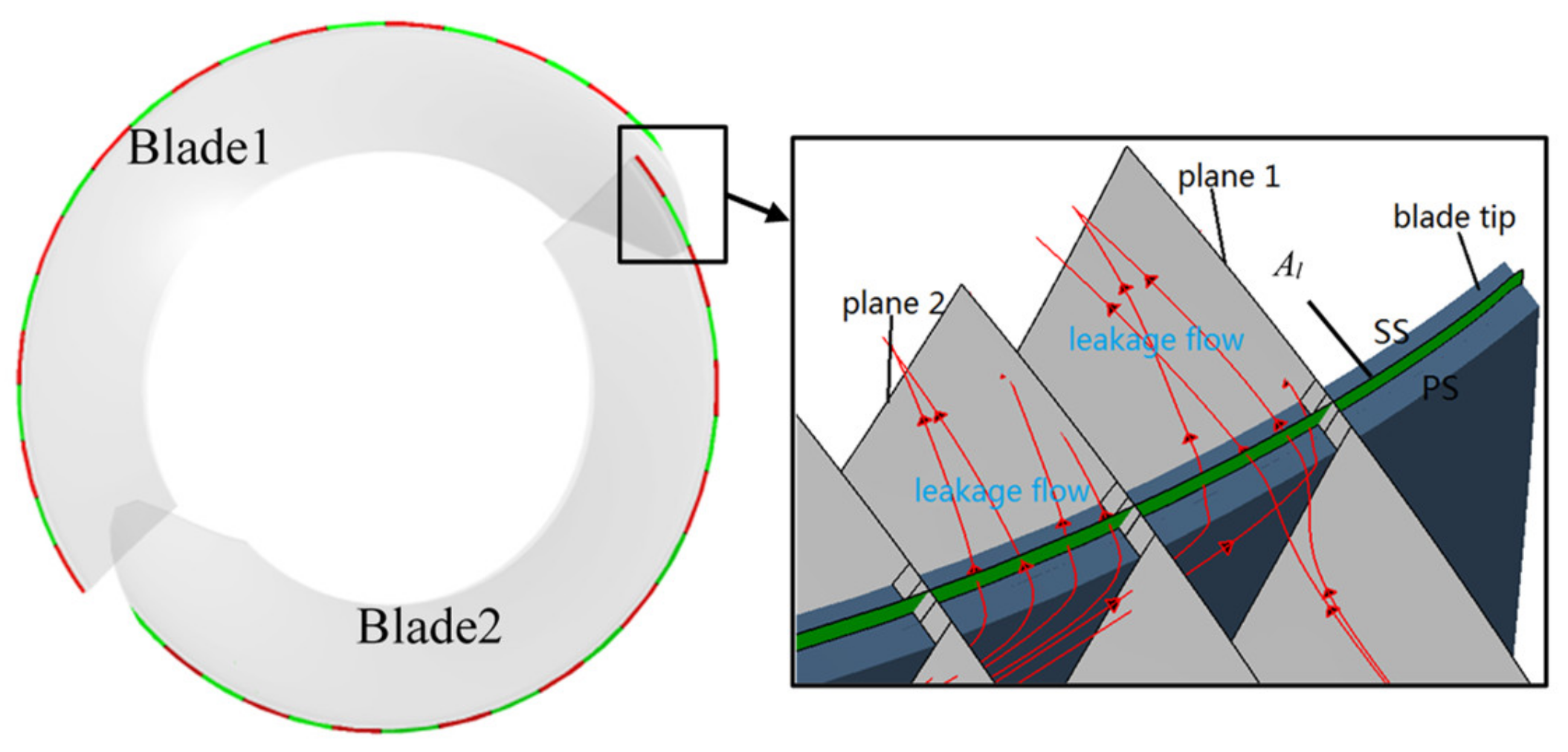
- Based on the statistical analysis with the PSL method, the leakage flow’s characteristic of the rotating impeller with the highest energy losses was illustrated. First, the main factors determining the blade tip clearance leakage flow were previously extracted, and the overall distributing law was clarified. Then, the quantitative regression formulas were defined, and at the same time, it was demonstrated that the influence from the tip load comes to be weaker when the cruising speed became larger, while the effect from the scraping pressure tended to be larger.
- (4)
- After the execution of the unsteady analysis, the pressure pulsations, the unsteady forces, and the cavitation influence by the cruising speed were introduced. When the cruising speed increased, the pressure pulsation became larger, while the radial force, the axial force, and the cloudy cavity size became smaller.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, G.; Lu, L.; Sahoo, P.K. Numerical simulation of unsteady cavitating flows of pumpjet propulsor. Ships Offshore Struct. 2015, 11, 1–11. [Google Scholar] [CrossRef]
- Dai, C.; Zhang, Y.; Pan, Q.; Dong, L.; Liu, H. Study on vibration characteristics of marine centrifugal pump unit excited by different excitation sources. J. Mar. Sci. Eng. 2021, 9, 274. [Google Scholar] [CrossRef]
- Park, W.-G.; Yun, H.S.; Chun, H.H.; Kim, M.C. Numerical flow simulation of flush type intake duct of waterjet. Ocean Eng. 2005, 32, 2107–2120. [Google Scholar] [CrossRef]
- Jiao, W.; Cheng, L.; Zhang, D.; Zhang, B.; Su, Y.; Wang, C. Optimal design of inlet passage for waterjet propulsion system based on flow and geometric parameters. Adv. Mater. Sci. Eng. 2019, 2019, 2320981. [Google Scholar] [CrossRef] [Green Version]
- Bulten, N.; Esch, B.V. Review of thrust prediction method based on momentum balance for ducted propellers and waterjets. In Proceedings of the ASME 2005 Fluids Engineering Division Summer Meeting, Houston, TX, USA, 19–23 June 2005. [Google Scholar]
- Keegan, D.; Martin, D. Use of RANS for waterjet analysis of a high-speed sealift concept vessel. In Proceedings of the First International Symposium on Marine Propulsors, Trondheim, Norway, 22–24 June 2009. [Google Scholar]
- Ding, J.-M.; Wang, Y.-S. Research on flow loss of inlet duct of marine waterjets. J. Shanghai Jiaotong Univ. Sci. 2010, 15, 158–162. [Google Scholar] [CrossRef]
- Luo, X.; Ye, W.; Huang, R.; Wang, Y.; Du, T.; Huang, C. Numerical investigations of the energy performance and pressure fluctuations for a waterjet pump in a non-uniform inflow. Renew. Energy 2020, 153, 1042–1052. [Google Scholar] [CrossRef]
- Cao, P.; Wang, Y.; Kang, C.; Li, G.; Zhang, X. Investigation of the role of non-uniform suction flow in the performance of water-jet pump. Ocean Eng. 2017, 140, 258–269. [Google Scholar] [CrossRef]
- Lu, L.; Li, Q.; Gao, Y.; Du, L. Numerical investigation of effect of different tip clearance size on the pumpjet propulsor performance. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2017, 45, 110–114. (In Chinese) [Google Scholar]
- Aldaş, K.; Yapıcı, R. Investigation of effects of scale and surface roughness on efficiency of water jet pumps using CFD. Eng. Appl. Comput. Fluid Mech. 2014, 8, 14–25. [Google Scholar] [CrossRef] [Green Version]
- Esch, B.V.; Cheng, L. Unstable operation of a mixed-flow pump and the influence of tip clearance. In Proceedings of the Asme-Jsme-Ksme Joint Fluids Engineering Conference -Ajk-fed-July, Hamamatsu, Japan, 24–29 July 2011. [Google Scholar]
- Bonaiuti, D.; Zangeneh, M.; Aartojarvi, R.; Eriksson, J. Parametric design of a waterjet pump by means of inverse design, CFD calculations and experimental analyses. J. Fluids Eng. 2010, 132, 31104. [Google Scholar] [CrossRef]
- Jiang, J.; Ding, J.; Wang, X. A vector control technology of waterjet propelled crafts using synchronous and mirror-equiangular thrust control strategy. Ocean Eng. 2020, 207, 107358. [Google Scholar] [CrossRef]
- Huang, R.; Ye, W.; Dai, Y.; Luo, X.; Wang, Y.; Du, T.; Huang, C. Investigations into the unsteady internal flow characteristics for a waterjet propulsion system at different cruising speeds. Ocean Eng. 2020, 203, 107218. [Google Scholar] [CrossRef]
- Zhang, Y.; Kang, C.; Gao, K.; Zhao, H. Flow and atomization characteristics of a twin-fluid nozzle with internal swirling and self-priming effects. Int. J. Heat Fluid Flow 2020, 85, 108632. [Google Scholar] [CrossRef]
- Jin, S.B.; Zhu, H.; Wang, D.; Wei, Y. Research on the global parameters selection and design of pumpjet. J. Haerbin Eng. Univ. 2018, 259, 56–61. (In Chinese) [Google Scholar]
- Zeng, G.; Li, Q.; Wu, P.; Qian, B.; Huang, B.; Li, S.; Wu, D. Investigation of the impact of splitter blades on a low specific speed pump for fluid-induced vibration. J. Mech. Sci. Technol. 2020, 34, 2883–2893. [Google Scholar] [CrossRef]
- Ji, B.; Luo, X.-W.; Wu, Y.-L.; Liu, S.-H.; Xu, H.-Y.; Oshima, A. Numerical investigation of unsteady cavitating turbulent flow around a full scale marine propeller. J. Hydrodyn. 2010, 22, 705–710. [Google Scholar] [CrossRef]
- Schnerr, G.H.; Sauer, J. Physical and numerical modeling of unsteady cavitation dynamics. In Proceedings of the 4th Inter-national Conference on Multiphase Flow, New Orleans, LA, USA, 7 May–1 June 2001. [Google Scholar]
- Li, X.; Zhao, Y.; Yao, H.; Zhao, M.; Liu, Z. A new method for impeller inlet design of supercritical CO2 centrifugal compressors in brayton cycles. Energies 2020, 13, 5049. [Google Scholar] [CrossRef]
- Lu, G.; Zuo, Z.; Liu, D.; Liu, S. Energy balance and local unsteady loss analysis of flows in a low specific speed model pump-turbine in the positive slope region on the pump performance curve. Energies 2019, 12, 1829. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.M.; Liu, Z.X. Quantitative analysis of influence factors on leakage flow of tip clearance in centrifugal impellers. J. Propuls. Technol. 2017, 38, 76–84. (In Chinese) [Google Scholar]
- Dambach, R.; Hodson, H.P.; Huntsman, I. 1998 turbomachinery committee best paper award: An experimental study of tip clearance flow in a radial inflow turbine. J. Turbomach. 1999, 121, 644–650. [Google Scholar] [CrossRef]
- Lu, Y.; Yang, J.; Wang, X.; Zhou, F. A symmetrical-nonuniform angular repartition strategy for the vane blades to improve the energy conversion ability of the coolant pump in the pressurized water reactor. Nucl. Eng. Des. 2018, 337, 245–260. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ΔPl | Ps | ΔPl2 | Ps2 | ΔPl3 | Ps3 | PsΔPl | Constant | |
|---|---|---|---|---|---|---|---|---|
| 0.5Ud_blade1 | 4.61121 | 0.24138 | −1.33613 | 0.33142 | −0.55116 | −0.105519 | 2.55449 | 2.90862 |
| 0.5Ud_blade2 | 0.29420 | −0.070853 | −0.288536 | 0.17669 | 0.302952 | −0.099124 | 0.058782 | 2.97665 |
| 1.0Ud_blade1 | 0.29236 | −0.24780 | −0.117941 | 0.16114 | 0.241065 | −0.217961 | 0.105077 | 2.9786 |
| 1.0Ud_blade2 | 0.96155 | −0.070169 | −0.144005 | 0.40447 | −0.27758 | −0.082514 | 0.329794 | 2.98942 |
| 1.7Ud_blade1 | 0.44893 | −0.295156 | −0.134373 | 0.93065 | −0.25488 | −0.254882 | −0.033486 | 2.48699 |
| 1.7Ud_blade2 | 0.33432 | −0.357459 | −0.080798 | 0.69957 | −0.33142 | −0.043504 | −0.143451 | 2.62507 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Liu, H.; Wang, X.; Wang, H. Study of the Operating Characteristics for the High-Speed Water Jet Pump Installed on the Underwater Vehicle with Different Cruising Speeds. J. Mar. Sci. Eng. 2021, 9, 346. https://doi.org/10.3390/jmse9030346
Lu Y, Liu H, Wang X, Wang H. Study of the Operating Characteristics for the High-Speed Water Jet Pump Installed on the Underwater Vehicle with Different Cruising Speeds. Journal of Marine Science and Engineering. 2021; 9(3):346. https://doi.org/10.3390/jmse9030346
Chicago/Turabian StyleLu, Yeming, Haoran Liu, Xiaofang Wang, and Hui Wang. 2021. "Study of the Operating Characteristics for the High-Speed Water Jet Pump Installed on the Underwater Vehicle with Different Cruising Speeds" Journal of Marine Science and Engineering 9, no. 3: 346. https://doi.org/10.3390/jmse9030346
APA StyleLu, Y., Liu, H., Wang, X., & Wang, H. (2021). Study of the Operating Characteristics for the High-Speed Water Jet Pump Installed on the Underwater Vehicle with Different Cruising Speeds. Journal of Marine Science and Engineering, 9(3), 346. https://doi.org/10.3390/jmse9030346