
Review and Prospects for Autonomous Observing Systems in Vessels of Opportunity





Abstract
:1. Introduction
2. VOO International Initiatives Overview
2.1. World Programmes
2.2. GOSUD Project
2.3. SAMOS Project
2.4. EU FerryBox Project
2.5. JERICO
2.6. Other Initiatives: Examples around the World
- CPR: The Continuous Plankton Recorder (CPR) Survey (https://www.cprsurvey.org): CPR was invented in 1925–1927 and the survey established in 1931 by Sir Alister Hardy. Over many decades, it has collected biogeography and ecology of plankton data and associated metadata across basin scales, using VOO. The CPR is usually towed from the stern of volunteer merchant ships such as RoRo and Container Ships. However, the CPR has also been deployed from large sailing vessels, fishing boats and super tankers. Today, the CPR Survey is operated by the Marine Biological Association (UK), but a Global Alliance of CPR Surveys was founded in 2011, involving partners from Europe, North and South America, Asia and Australia.
- PMEL Carbon Program: The Pacific Marine Environmental Laboratory (PMEL), within the designated Carbon Program (https://www.pmel.noaa.gov/co2), manages a network of surface underway carbon dioxide observations using VOO. This program was initiated in 1992 as part of the GOOS and uses container ships transiting across Pacific Ocean and NOAA research ships along the west American coast for measuring partial pressure of CO2 (pCO2), temperature and salinity. The PMEL Carbon Program is coordinated at an international level, by the International Ocean Carbon Coordination Project (IOCCP—http://www.ioccp.org/).
- Oleander Project: Within this project, continuous shipboard ADCP measurements have been used to investigate the variability of the Gulf Stream (http://www.po.gso.uri.edu/rafos/research/ole/). The project is an inter-institutional program and has support from SOOP. It provides oceanographic data such as ocean currents, Sea Surface Temperature (SST), Sea Surface Salinity (SSS) and surface CO2 in a region between New Jersey and Bermuda.
- International SeaKeepers Society:Aaround the world, non-profit organizations like the International SeaKeepers Society support marine science. International Seekeepers uses privately owned yachts as platforms for oceanographic research, educational outreach and marine conservation. It focuses on ocean issues in cooperation with governmental agencies, other like-minded organizations, the academic community and the public (https://www.seakeepers.org/).
- FerryMon project (http://paerllab.web.unc.edu/projects/ferrymon/): The Ferry Monitoring project is a local project that monitors Neuse River Estuary in North Carolina (USA), measuring water quality indicators, human and climate drivers of water quality variability [11]. FerryMon uses North Carolina Department of Transportation (NCDOT) ferries to provide continuous, space-time intensive, accurate measurements of chl-a and other key water quality criteria, using sensors placed in a flow-through system and discrete sampling of nutrients, organics, diagnostic photopigment and molecular indicators of major algal groups in a near real-time manner.
- STRATOGEM program: Under the umbrella of this program (www.stratogem.ubc.ca), observations of chlorophyll-a biomass from an instrumented ferry have been used to determine how the Fraser River plume affects phytoplankton biomass in the Strait of Georgia [12]. These data are part of Ocean Networks Canada (https://www.oceannetworks.ca/).
- RECOPESCA: In 2005, the RECOPESCA project implemented by IFREMER put on fishing gears, used by a sample of voluntary fishing vessels, diverse sensors to measure fishing effort, temperature, salinity and turbidity [13]. The equipment was self-powered and able to automatically send the data to a receiver on board and after to land [14].
- Alaska Ocean Observing System (AOOS-https://aoos.org/): This is another example of a collaborative partnership, between several Alaska and U.S. Federal organizations, including Indigenous People, industrial and Non-Governmental Organizations. AOOS is part of the U.S. Integrated Ocean Observing System (US IOOS), which is one of the Regional Associations of Coastal Ocean Observing Systems established for North America. The Alaska State ferry system serves as a platform for ocean acidification research on its weekly run between Washington State and Alaska. Instruments installed on these vessels are recording CO2, as well as seawater temperature, salinity and dissolved oxygen.
- IMOS Ships of Opportunity (SOOP) Facility: This is managed by Australia’s Integrated Marine Observing System (IMOS) enabled by the National Collaborative Research Infrastructure Strategy (NCRIS). It is operated by a consortium of institutions with the University of Tasmania as Lead Agent. It monitors physical, biogeochemical and fish parameters (http://imos.org.au/facilities/shipsofopportunity/).
- The OceanoScientific® Programme: Under this programme, small vessels use the OceanoScientific® System (OSC System) which is equipment developed for the automatic acquisition and satellite transmission of several scientific parameters at sea. Methods and data formats used follow the recommendations and standards of UN agencies related to climate change and operational oceanography/meteorology, in particular JCOMM’s Ships Observation Team (WMO/IOC-UNESCO) [15].
- Tara Ocean Foundation expeditions (https://oceans.taraexpeditions.org/en/) are an example of the use of sailing vessels for data acquisition. The Tara schooner is a floating laboratory that already made 4 major expeditions, since 2006, in several oceans and seas (e.g., Artic, Mediterranean, Pacific and a global ocean expedition). The equipment used included flowcams, CTDs, flowcytobots, Underwater Video Profiler (UVP), plankton nets and many other instruments.
- FOS—Fishery Observing System: In support of the National Research Council of Italy, (CNR) has been undertaking scientific and technological activities aimed at implementing intelligent and automated systems for the collection of data in support of oceanography and fisheries science, as well as providing services for fishing operators. Two independent operational units autonomously developed two original devices, the Italian Fishery Observing System (FOS) and the Information and Communications Technology kit (ICT-kit), recently converging towards a new modular system named the Fishery and Oceanography Observing System (FOOS). VOO was equipped with this system to collect data regarding catches, fishing operation position, depth and temperature during the hauls [16], mainly in the Strait of Sicily and the Adriatic Sea.
- TRANSMED and PartnerSHIPS programmes: These are programs conducted by CIESM (International Commission for Scientific Exploration of the Mediterranean Sea). The aim of the PartnerSHIPS project was the development of a network of VOO for automated monitoring of the surface waters of the Mediterranean. They use the TRANSMED system (www.ifremer.fr/transmed/) to measure the physical and biogeochemical parameters of the Mediterranean (temperature, salinity, oxygen and pCO2, chlorophyll, etc.). This system was installed aboard merchant vessels servicing routes in Mediterranean. Data are integrated in Coriolis and GOSUD databases.
- Sailing vessels as VOO: Sailing expedition vessels and ocean racing yachts can deploy autonomous instruments (drifters and floats) in sea areas with very limited or no other shipping routes (e.g., Arctic and Antarctic waters) but could also directly gather ocean-atmosphere data with innovative underway instrumentation [2]. Several round the-world races such as Volvo Ocean Race (https://www.volvooceanrace.com/en/news/10225_What-is-the-Science-Programme.html), and Barcelona World Race [17], among others, now comprise corresponding science projects.
3. VOO Data Types and Users
3.1. Navigation, Safety and Weather Forecasting Communities
3.2. Oceanographic Process and Climate Studies Communities
3.3. Harmful Algal Blooms (HAB) Communities
3.4. Remote Sensing Communities
3.5. Numerical Modeling Communities
3.6. Fisheries Communities
4. Portuguese Initiative within VOO Schemes
4.1. General Overview
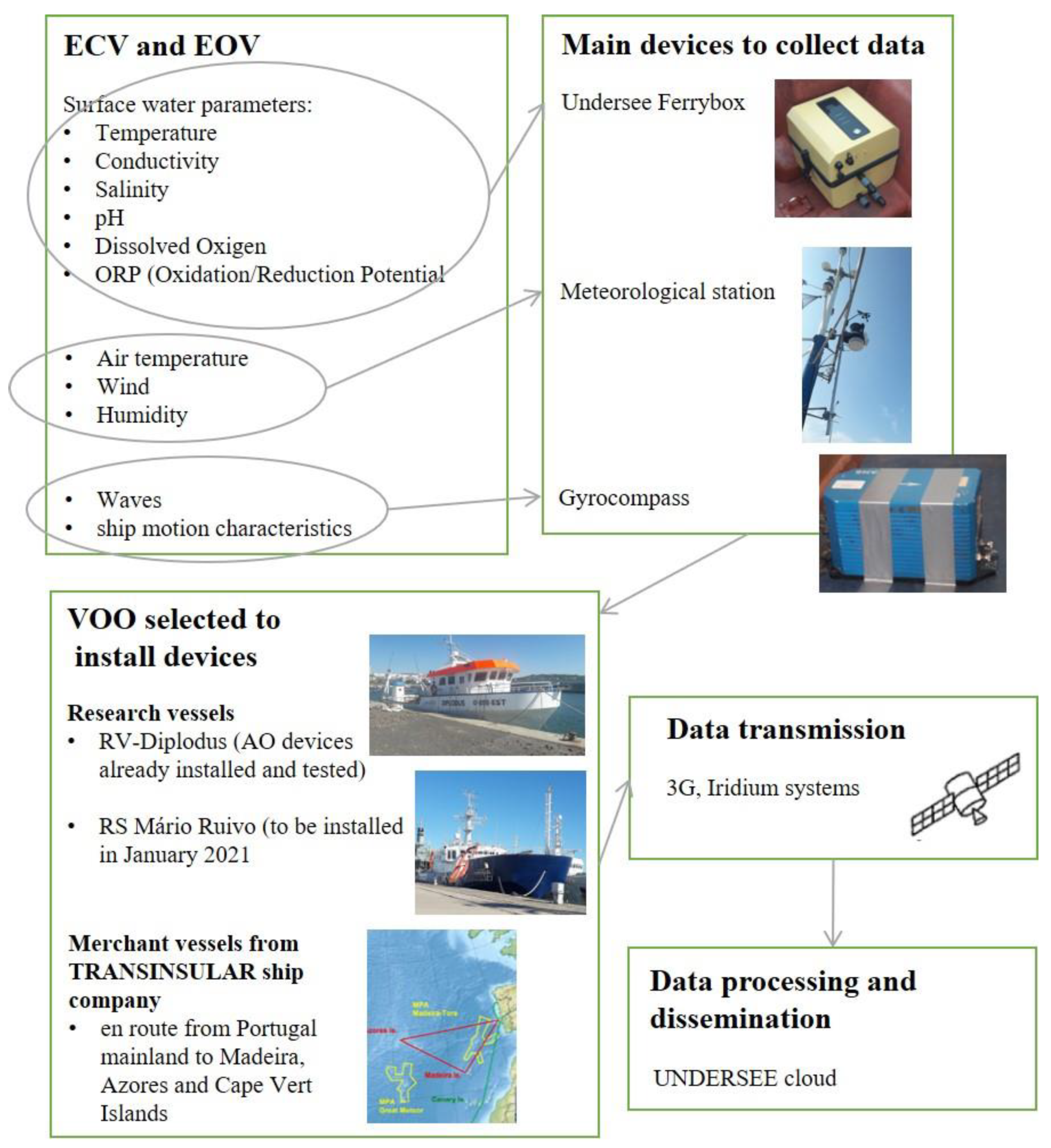
4.2. Observing System Design
- Definition of ECV/EOV to be collected (by scientific proponent team);
- Recruitment of volunteer Vessels of Opportunity;
- Assembly of acquisition equipment on ships;
- Data acquisition transmission and processing (includes quality control);
- Data dissemination.
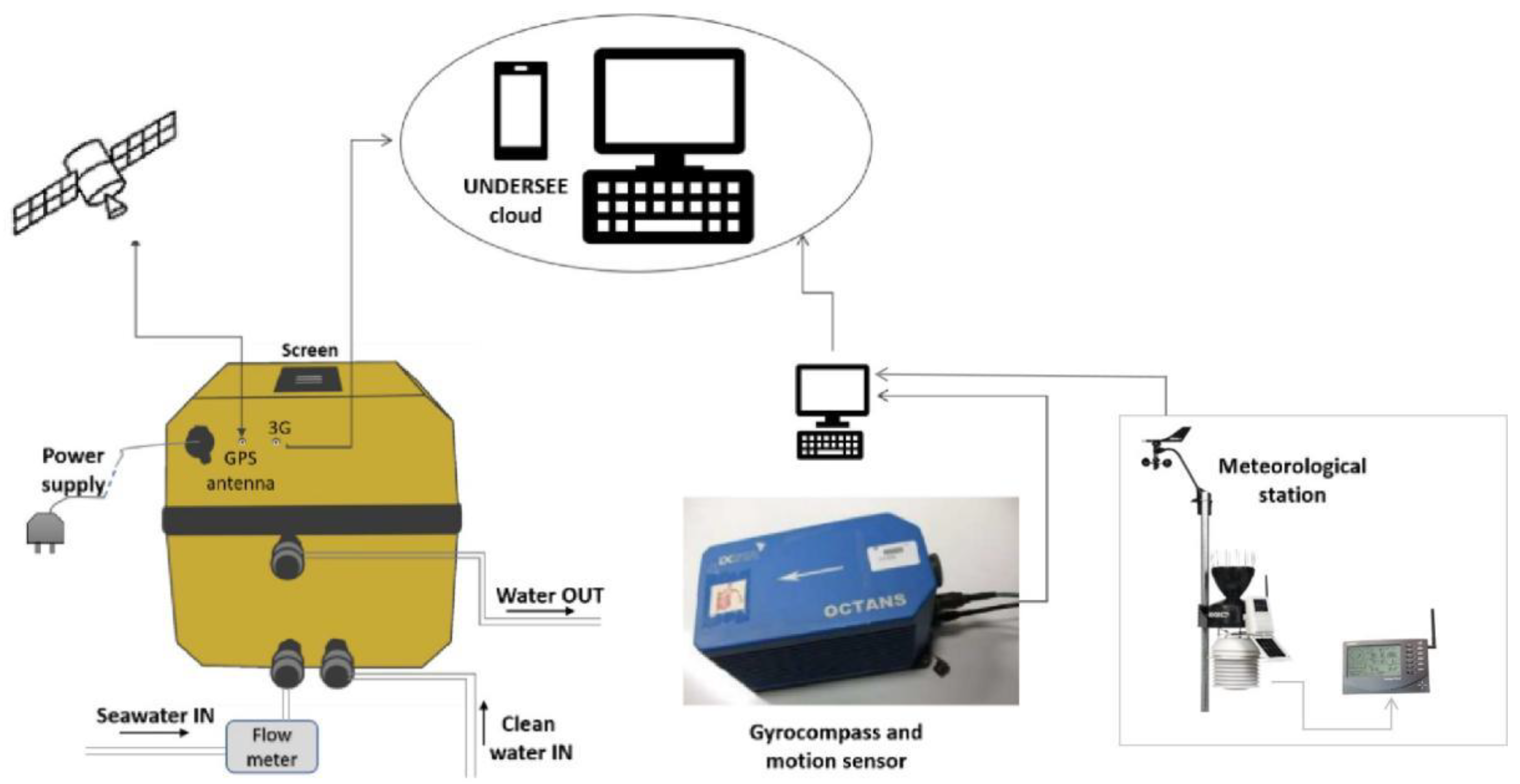
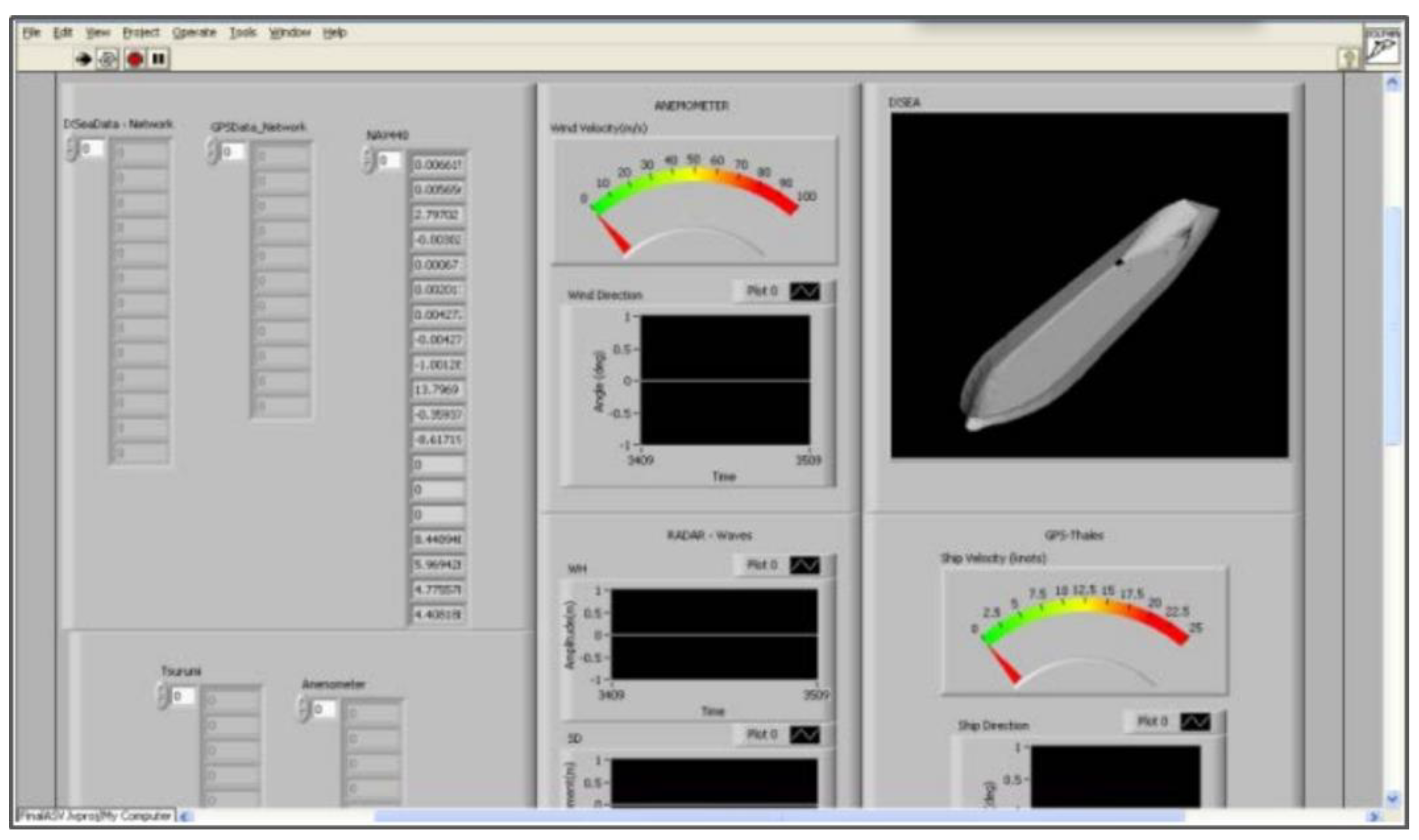
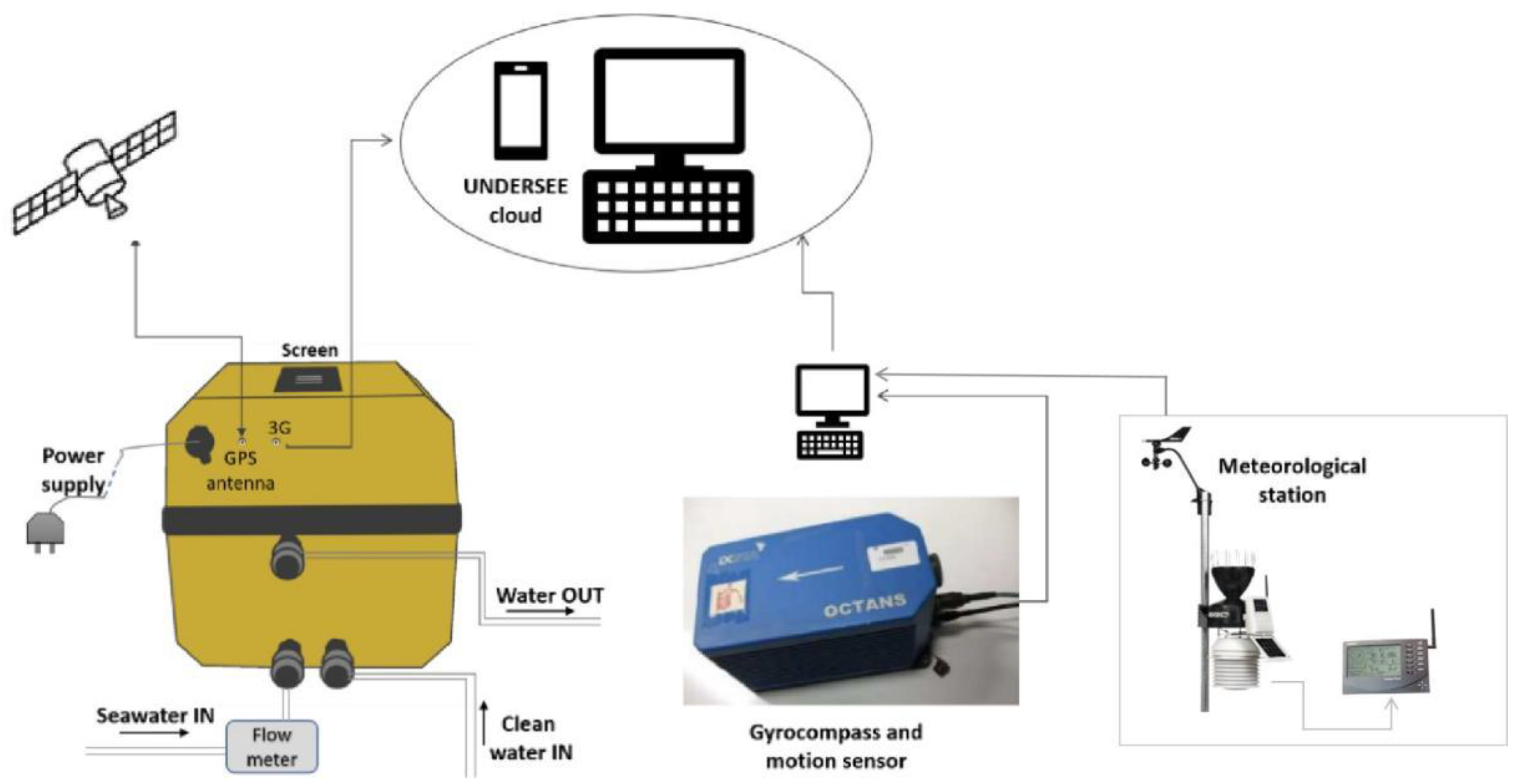
4.3. Acquisition System: Devices Description
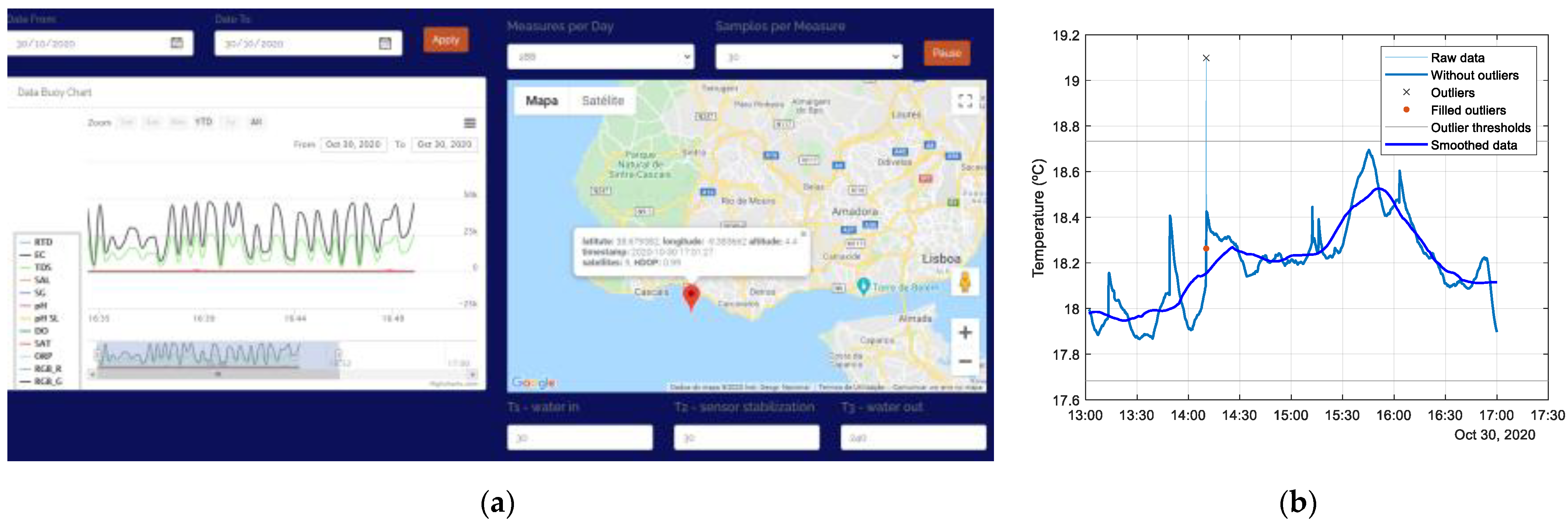
4.4. Data Processing and Dissemination
5. Conclusion: Potentialities and Future Developments
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym/Abbreviation | Meaning |
|---|---|
| AOOS | Alaska Ocean Observing System, USA |
| AOS | Autonomous Observing System |
| CCMAR | Centre of Marine Sciences, Portugal |
| CCVP/FMC-PT | Portuguese Fisheries Control and Surveillance Center |
| CENTEC | Centre for Marine Technology and Ocean Engineering, University of Lisbon, Portugal |
| CIESM | International Commission for Scientific Exploration of the Mediterranean Sea |
| CNR | National Research Council of Italy |
| CNRS | French National Centre for Scientific Research |
| COSYNA | Coastal Observing System for Northern and Artic Seas |
| CPR | Continuous Plankton Recorder |
| ECV | Essential Climate Variables |
| EOV | Essential Oceanic Variables |
| EMODnet | European Marine Observation and Data Network |
| EuroGOOS | European Global Ocean Observation System |
| FCT | Portuguese Science and Technology Foundation |
| FOO | Framework for Ocean Observing |
| FOOS | Fishery and Oceanography Observing System, Italy |
| FOS | Fishery Observing System, Italy |
| FSU | Florida State University, USA |
| GEOMAR | GEOMAR Helmholtz Centre for Ocean Research Kiel, Germany |
| GCOS | Global Climate Observing System |
| GOOS | Global Ocean Observing System |
| GOSUD | Global Ocean Surface Underway |
| GRAs | GOOS Regional Alliances |
| HCMR | Hellenic Centre for Marine Research, Greece |
| HZG | Helmholtz-Zentrum Geesthacht, Germany |
| ICOADS | International Comprehensive Ocean-Atmosphere Data Set |
| IOCCP | International Ocean Carbon Coordination Project |
| IFREMER | French Research Institute for Exploitation of the Sea |
| IMOS | Australia’s Integrated Marine Observing System |
| INESC | Portuguese Institute for Systems Engineering and Computers |
| IOC | Intergovernmental Oceanographic Commission |
| IODE | International Oceanographic Data and Information Exchange |
| IPMA | Portuguese Institute for the Ocean and Atmosphere, Portugal |
| JAFIC | Japan Fisheries Information Service Center |
| JERICO | Joint European Research Infrastructure network for Coastal Observatories |
| JCOMM | Joint Technical Commission for Oceanography and Marine Meteorology |
| JCOMMOPS | JCOMM in situ Observing Platform Support Centre |
| MDC | Marine Data Center, FSU, USA |
| MONICAP | Continuous Fisheries Activity Monitoring—VMS, Portugal |
| NCDOT | North Carolina Department of Transportation, USA |
| NCRIS | National Collaborative Research Infrastructure Strategy |
| NOAA | National Oceanic and Atmospheric Administration, U.S. |
| PMEL | Pacific Marine Environmental Laboratory, USA |
| ROOS | Regional Operational Oceanographic System |
| SAMOS | Shipboard Automated Meteorological and Oceanographic System |
| SOOP | Ships of Opportunity Program |
| SSS-OS | French Sea Surface Salinity Observation Service |
| SYKE | Marine Research Centre at the Finnish Environment Institute |
| UN | United Nations |
| UNESCO | United Nations Educational, Scientific and Cultural Organization |
| US IOOS | U.S. Integrated Ocean Observing System |
| VOO | Vessels of Opportunity |
| VOS | Voluntary Observing Ships Program |
| WMO | World Meteorological Organization |
| VMS | Vessel Monitoring System |
References
- Allen, S.; Wild-Allen, K. Ocean In Situ Sampling and Interfaces with other Environmental Monitoring Capabilities. In Challenges and Innovations in Ocean In Situ Sensors. Measuring Inner Ocean Processes and Health in the Digital Age; Delory, E., Pearlman, J., Eds.; Elsevier: Amsterdem, The Netherlands, 2019; pp. 1–26. [Google Scholar]
- Smith, S.; Alory, G.; Andersson, A.; Asher, W.; Baker, A.; Berry, D.; Schuster, U.; Steventon, E.; Vinogradova-shiffer, N. Ship-based contributions to global ocean, weather, and climate observing systems. Front. Mar. Sci. 2019, 6, 434. [Google Scholar] [CrossRef] [Green Version]
- Task Team for an Integrated Framework for Sustained Ocean Observing. A Framework for Ocean Observing (FOO); UNESCO: Paris, France, 2012; IOC/INF-1284. [Google Scholar]
- Woodruff, S.; Diaz, H.; Worley, S.; Reynolds, R.; Lubker, S. Early ship observational data and ICOADS. Clim. Chang. 2005, 73, 169–194. [Google Scholar] [CrossRef]
- Freeman, E.; Woodruff, S.D.; Worley, S.J.; Lubker, S.J.; Kent, E.C.; Angel, W.E.; Berry, D.I.; Brohan, P.; Eastman, R.; Gates, L.; et al. ICOADS Release 3.0: A major update to the historical marine climate record. Int. J. Climatol. 2017, 37, 2211–2232. [Google Scholar] [CrossRef] [Green Version]
- Alory, G.; Delcroix, T.; Téchiné, P.; Diverrès, D.; Varillon, D.; Cravatte, S.; Gouriou, Y.; Grelet, J.; Jacquin, S.; Kestenare, E.; et al. The French contribution to the voluntary observing ships network of sea surface salinity. Deep Sea Res. Part I Oceanogr. Res. Pap. 2015, 105, 1–18. [Google Scholar] [CrossRef]
- Smith, S.R.; Briggs, K.; Bourassa, M.A.; Elya, J.; Paver, C.R. Shipboard automated meteorological and oceanographic system data archive: 2005–2017. Geosci. Data J. 2018, 5, 73–86. [Google Scholar] [CrossRef] [Green Version]
- Petersen, W. FerryBox systems: State-of-the-art in Europe and future development. J. Mar. Syst. 2014, 140, 4–12. [Google Scholar] [CrossRef] [Green Version]
- Hydes, D.; Kelly-Gerreyn, A.; Colijn, F.; Petersen, W.; Schroeder, F.; Mills, D.K.; Durand, D.; Wehde, H.; Sorensen, K.; Morrison, G. The Way Forward in Developing and Integrating Ferry-Box Technologies. In Proceedings of the OceanObs ’09: Sustained Ocean Observations and Information for Society (Vol. 2), Venice, Italy, 21–25 September 2009; Hall, J., Harrison, D.E., Stammer, D., Eds.; WPP-306; ESA Publication: Auckland, New Zealand, 2010. [Google Scholar] [CrossRef] [Green Version]
- Petersen, W.; Colijn, F.; Gorringe, P.; Kaitala, S.; Karlson, B.; King, A.; Lips, U.; Ntoumas, M.; Seppälä, J.; Sørensen, J.; et al. FerryBoxes within Europe: State-of-the-art and Integration in the European Ocean Observation System (EOOS). In Operational Oceanography Serving Sustainable Marine Development, Proceedings of the Eight EuroGOOS International Conference, Bergen, Norway, 3–5 October 2017; Buch, E.V., Fernández, D., Eparkhina, P., Gorringe, G., Nolan, G., Eds.; EuroGOOS: Brussels, Belgium, 2018; pp. 63–70. [Google Scholar]
- Paerl, H.W.; Rossignol, K.L.; Guajardo, R.; Hall, N.; Joyner, A.R.; Peierls, B.L.; Ramus, J.S. FerryMon: Ferry Based Monitoring and Assessment of Human and Climatically Driven Environmental Change in the Albamarle-Pamlico Sound System. Environ. Sci. Technol. 2009, 43, 7609–7613. [Google Scholar] [CrossRef] [Green Version]
- Halverson, M.J.; Pawlowicz, R. High-resolution observations of chlorophy-a biomass from an instrumented ferry: Influence of the Fraser River plume from 2003 to 2006. Cont. Shelf Res. 2013, 59, 52–64. [Google Scholar] [CrossRef]
- Martinelli, M.; Guicciardi, S.; Penna, P.; Belardinelli, A.; Croci, C.; Domenichetti, F.; Santojanni, A.; Sparnocchia, S. Evaluation of the oceanographic measurement accuracy of different commercial sensors to be used on fishing gears. Ocean Eng. 2016, 111, 22–33. [Google Scholar] [CrossRef]
- Leblond, E.; Lazure, P.; Laurans, M.; Rioual, C.; Woerther, P.; Quemener, L.; Berthou, P. The RECOPESCA project: A new example of participative approach to collect fisheries and in situ environmental data. Mercator Ocean. Q. Newsl. 2010, 37, 40–48. [Google Scholar]
- Choquer, M.; Blouch, P.; Gaillard, F.; Reynaud, T.; Reverdin, G.; Metzl, N.; Kramp, M.; Branellec, P.; Diverrès, D. The OceanoScientific® Programme: Scientific Data Acquisition by Sailing Ships. In Proceedings of the TECO-2014 WMO Technical Conference on Meteorological and Environmental Instruments and Methods of Observation, Saint Petersburg, Russian, 7–9 July 2014. [Google Scholar]
- Patti, B.; Martinelli, M.; Aronica, S.; Belardinelli, A.; Penna, P.; Bonanno, A.; Basilone, G.; Fontana, I.; Giacalone, G.; Gabriele Gallì, N.; et al. The Fishery and Oceanography Observing System (FOOS): A tool for oceanography and fisheries science. J. Oper. Oceanogr. 2016, 9, 99–118. [Google Scholar] [CrossRef] [Green Version]
- Salat, J.; Umbert, M.; Ballabrera-Poy, J.; Fernández, P.; Salvador, K.; Martínez, J. The contribution of the Barcelona World Race to improved ocean surface information. A validation of the SMOS remotely sensed salinity. Contrib. Sci. 2013, 9, 89–100. [Google Scholar]
- Yamanaka, I.; Ito, S.; Niwa, K.; Tanake, R.; Yabuta, Y.; Chikuni, S. The fisheries forecasting system in Japan for coastal pelagic fish. FAO Fish. Tech. Pap. 1988, 301, 72. [Google Scholar]
- Santos, A.M.P. Fisheries oceanography using satellite and airborne remote sensing methods: A review. Fish. Res. 2000, 49, 1–20. [Google Scholar] [CrossRef]
- Kent, E.C.; Taylor, P.K.; Truscott, B.S.; Hopkins, J.S. The accuracy of Voluntary Observing Ships’ meteorological observations—Results of the VSOP-NA. J. Atmos. Oceanic. Technol. 1993, 10, 591–608. [Google Scholar] [CrossRef]
- Guedes Soares, C. Assessment of the Uncertainty in Visual Observations of Wave Height. Ocean Eng. 1986, 13, 37–56. [Google Scholar] [CrossRef]
- Guedes Soares, C. Calibration of Visual Observations of Wave Period. Ocean Eng. 1986, 13, 539–547. [Google Scholar] [CrossRef]
- Hogben, N.; Da Cunha, L.F.; Oliver, H.N. Global Wave Statistics; Unwin Brothers Limited: London, UK, 1986. [Google Scholar]
- Gulev, S.K.; Grigorieva, V.; Sterl, A.; Woolf, D. Assessment of the reliability of wave observations from voluntary observing ships: Insights from the validation of a global wind wave climatology based on voluntary observing ship data. J. Geophys. Res. Oceans. 2003, 108, 3236. [Google Scholar] [CrossRef] [Green Version]
- Vettor, R.; Guedes Soares, C. Detection and analysis of the main routes of voluntary observing ships in the North Atlantic. J. Navig. 2015, 68, 397–410. [Google Scholar] [CrossRef] [Green Version]
- Vettor, R.; Guedes Soares, C. Development of a ship weather routing system. Ocean Eng. 2016, 123, 1–14. [Google Scholar] [CrossRef]
- Vettor, R.; Guedes Soares, C. Assessment of the storm avoidance effect on the wave climate along the main North Atlantic routes. J. Navig. 2016, 69, 127–144. [Google Scholar] [CrossRef] [Green Version]
- Vettor, R.; Guedes Soares, C. Rough Weather Avoidance Effect on the Wave Climate Experienced by Oceangoing Vessels. Appl. Ocean Res. 2016, 59606, 615. [Google Scholar] [CrossRef]
- Laurs, R.M.; Fiúza, A.F.G.; Santos, A.M.P. Plan for Satellite Remote Sensing Applications to Portuguese Fisheries; SATOCEAN Technical Report (1); Relatório Técnico (1/89); Grupo de Oceanografia, Departamento de Física/Centro de Geofísica, Universidade de Lisboa: Lisboa, Portugal, 1989; p. 12. [Google Scholar]
- Santos, A.M.P.; Fiúza, A.F.G.; Laurs, R.M. Influence of SST on catches of swordfish and tuna in the Portuguese domestic longline fishery. Int. J. Remote Sens. 2006, 27, 3131–3152. [Google Scholar] [CrossRef]
- Santos, A.M.P.; Oliveira, L.; Aurélio, J. BASBLACK Project: An example of Good Collaboration between Scientists and Fishermen. ICES CM 1999/Q:08. In Proceedings of the Contributions to the 1999 ICES Annual Science Conference, Stockholm, Sweden, 27 September–6 October 1999; p. 44. Available online: https://www.ices.dk/Science/publications/Documents/CM-documents/CM%20Documents%201999.pdf (accessed on 29 March 2021).
- Moreira, F. O projeto MONICAP. Rev. Mar. 2018, 1002, 42–43. [Google Scholar]
- Fonseca, T.; Campos, A.; Afonso-Dias, M.; Fonseca, P.; Pereira, J. Trawling for cephalopods off the Portuguese coast—Fleet dynamics and landings composition. Fish. Res. 2008, 92, 180–188. [Google Scholar] [CrossRef]
- Pilar-Fonseca, T.; Pereira, J.; Campos, A.; Moreno, A.; Fonseca, P.; Afonso-Dias, M. VMS-based fishing effort and population demographics for the European squid (Loligo vulgaris) off the Portuguese coast. Hydrobiologia 2014, 725, 137–144. [Google Scholar] [CrossRef]
- Pilar-Fonseca, T.; Campos, A.; Pereira, J.; Moreno, A.; Lourenço, S.; Afonso-Dias, M. Integration of fishery-dependent data sources in support of octopus spatial management. Mar. Policy 2014, 45, 69–75. [Google Scholar] [CrossRef]
- Pascoal, R.; Guedes Soares, C. Non-Parametric Wave Spectral Estimation Using Vessel Motions. Appl. Ocean Res. 2008, 30, 46–53. [Google Scholar] [CrossRef]
- Pascoal, R.; Guedes Soares, C. Kalman Filtering of Vessel Motions for Ocean Wave Directional Spectrum Estimation. Ocean Eng. 2009, 36, 477–488. [Google Scholar] [CrossRef]
- Perera, L.; Rodrigues, J.M.; Pascoal, R.; Guedes Soares, C. Development of an onboard decision support system for ship navigation under rough weather conditions. In Sustainable Maritime Transportation and Exploitation of Sea Resources; Rizzuto, E., Guedes Soares, C., Eds.; Taylor & Francis Group: London, UK, 2012; pp. 837–844. [Google Scholar]
- Rodrigues, J.M.; Perera, L.; Guedes Soares, C. Decision support system for the safe operation of fishing vessels in waves. In Maritime Technology and Engineering, 1st ed.; Guedes Soares, C., Garbatov, Y., Sutulo, S., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2012; pp. 153–161. [Google Scholar]
- Hinostroza, M.A.; Guedes Soares, C. Parametric estimation of the directional wave spectrum from ship motions. Int. J. Marit. Eng. 2016, 158, A121–A130. [Google Scholar] [CrossRef]
- Pascoal, R.; Perera, L.P.; Guedes Soares, C. Estimation of directional sea spectra from ship motions in sea trials. Ocean Eng. 2017, 132, 126–137. [Google Scholar] [CrossRef]
- Santos, A.M.; Lourenço, N.; Carvalho, A.; Sousa Pinto, I.; Oliveira, A. OBSERVA.PT: Observations on board national commercial ships to support the conservation of marine biodiversity in the Portuguese Seas. OceanObs’19 2018. [Google Scholar] [CrossRef]
- Guedes Soares, C.; Rusu, L.; Bernardino, M.; Pilar, P. An Operational Forecasting System for the Portuguese Continental Coastal Area. J. Oper. Oceanogr. 2011, 4, 17–27. [Google Scholar] [CrossRef] [Green Version]
- Rusu, L.; Guedes Soares, C. Forecasting fishing vessel responses in coastal areas. J. Mar. Sci. Technol. 2014, 19, 215–227. [Google Scholar] [CrossRef]
- Rusu, L.; Guedes Soares, C. Local data assimilation scheme for wave predictions close to the Portuguese ports. J. Oper. Oceanogr. 2014, 7, 45–57. [Google Scholar] [CrossRef] [Green Version]
- Almeida, S.; Rusu, L.; Guedes Soares, C. Data assimilation with the ensemble Kalman filter in a high-resolution wave forecasting model for coastal areas. J. Oper. Oceanogr. 2016, 9, 103–114. [Google Scholar] [CrossRef]
- Costa, T.C.; Pereira, L.T.; Marta-Almeida, M.; Guedes Soares, C. Mapping of currents off the Northwestern Iberian coast with the Regional Ocean Modelling System. J. Oper. Oceanogr. 2020, 13, 71–83. [Google Scholar] [CrossRef]
- Bettencourt, J.H.; Guedes Soares, C. Surface circulation in the Eastern Central North Atlantic. In Developments in Maritime Technology and Engineering; Guedes Soares, C., Santos, T.A., Eds.; Taylor and Francis: London, UK, 2021. [Google Scholar]
- Liu, Y.H.; Kerkering, H.; Weisberg, R.H. Introduction to Coastal Ocean Observing Systems. In Coastal Ocean Observing Systems; Liu, Y., Kerkering, H., Weisberg, R.H., Eds.; Academic Press: London, UK, 2015; pp. 1–10. [Google Scholar]
- Izquierdo, P.; Guedes Soares, C.; Fontes, J.B. Monitoring of Waves with X- Band Radar in the Port of Sines. In Building the European Capacity in Operational Oceanography; Dahlin, H., Flemming, N.C., Nittis, K., Petersson, S.E., Eds.; Elsevier: Amsterdam, The Netherlands, 2003; pp. 154–160. [Google Scholar]
- Izquierdo, P.; Guedes Soares, C.; Nieto Borge, J.C.; Rodriguez, G.R. A Comparison of Sea State Parameters from Nautical Radar Images and Buoy Data. Ocean Eng. 2004, 31, 2209–2225. [Google Scholar] [CrossRef]
- Izquierdo, P.; Guedes Soares, C. Analysis of Sea Waves and Wind from X- Band Radar. Ocean Eng. 2005, 32, 1404–1409. [Google Scholar] [CrossRef]





| Program/Project | Main Entities Involved | Start | Main Observation Zones | Type of Ships | Main Measured and Derived Parameters | References |
|---|---|---|---|---|---|---|
| Continuous Plankton Recorder (CPR) | Marine Biological Association; Global Alliance of CPR Surveys | 1931 | Seas and oceans around the world | Merchant, RoRo, Container ships; Large sailing vessels; Fishing boats; Super tankers. | Plankton | https://www.cprsurvey.org; www.globalcpr.org |
| PMEL Carbon Program | PMEL; NOAA; IOCCP | 1992 | Pacific Ocean | Container vessels; Research | pCO2 | https://www.pmel.noaa.gov/co2 |
| Oleander | Rhode Island and New York Universities; NOAA | 1992 | Gulf Stream (New Jersey; Bermuda) | Container vessel (CMV Oleander) | Currents; SST; SSS; CO2 | http://www.po.gso.uri.edu/rafos/research/ole/ |
| International SeaKeepers Society | Non profit and Government Organizations; Academic Communities and the Public | 1998 | Seas and oceans around the world | Yatchs | e.g., Temperature; pH; Salinity, Nutrients, Chlorophyll; Dissolved Oxygen | https://www.seakeepers.org/ |
| FerryMon | Paerl Lab; University of North Carolina | 1999 | Neuse River Estuary (North Carolina) | NCDOT Ferries | Water Quality Parameters | http://paerllab.web.unc.edu/projects/ferrymon/; [11] |
| STRATOGEM | NSERC; British Columbia and Vitoria Universities | 2002 | Fraser River; Strait of Georgia | Ferries | Salinity; Chlorophyll-a | www.stratogem.ubc.ca; [12] |
| RECOPESCA | IFREMER | 2005 | Atlantic Coast; Caribbean Islands | Fishing vessels | Temperature; Salinity Turbidity; Fishing effort | [13,14] |
| AOOS | US IOOS; NOAA | 2005 | Alaska | Ferries | Temperature; Salinity; Dissolved Oxigen; CO2 | https:/aoos.org/alaska-ocean-acidification-network/monitoring/ship-based-monitoring/ |
| IMOS Ships of Opportunity Facility | NCRIS; CSIRO; University of Tasmania; IMOS | 2006 | Australian regional seas; New Zealand; Southern Ocean | Ferries; Commercial; Research vessels | CO2; Plankton; Temperature; Salinity; Chlorophyll-a; Turbidity; Bioacoustic data | http://imos.org.au/facilities/shipsofopportunity/ |
| OceanoScientific® Programme | IFREMER, MétéoFrance; LOCEAN (IPSL-INSU/CNRS, GEOMAR (Germany); Maine University | 2006 | Seas and oceans around the world (e.g. North Atlantic); Drake Passage, Cape Horn, Antarctic, South Pacific) | Small sailing vessels | Wind; Air Relative Humidity; Air Temperature; Sea Level Pressure; SST, SSS; pCO2; Fluorescence, pH | 14-05-15-TECO14-OceanoScientific (wmo.int); [15] |
| Foundation Tara Ocean | Public Interest Foundation (France); Special Observer at the UN | 2006 | World wide | Research Schooner Tara | e.g., data from Flowcams, CTD, Flowcytobots, Underwater Video Profiler (UVP), Plankton Nets | https://oceans.taraexpeditions.org/en/ |
| FOS/FOOS | CNR | 2007 | Adriatic Sea; Strait of Sicily | Fishing vessel | Navigation information; Geo-referenced Catches; Depth; Temperature for each Fishing Haul; Meteorological Parameters; State of the Sea | [16] |
| TRANSMED/PartnerSHIPS Programmes | CIESM | 2010 | Mediterranean | Merchant vessels | e.g., Temperature; Salinity; Oxygen; pCO2; Chlorophyll | www.ifremer.fr/transmed/ |
| Sailing vessels as VOO | Volvo Cars NOAA; JCOMMOPS (UNESCO-IOC), GEOMAR | 2017- | Racing zones | Sailing vessels | e.g., Salinity, pCO2, Dissolved CO2; Chlorophyll-a; Plankton | e.g., https://www.volvooceanrace.com/en/news/10225_What-is-the-Science-Programme.html; [17] |
| Physics | Biogeochemistry | Biology and Ecosystems |
|---|---|---|
| Sea state | Oxygen | Phytoplankton biomass and diversity |
| Ocean surface stress | Nutrients | Zooplankton biomass and diversity |
| Sea ice | Inorganic carbon | Fish abundance and distribution |
| Sea surface height | Transient tracers | Marine turtles, birds, mammals abundance and distribution |
| Sea surface temperature | Particulate matter | Hard coral cover and composition |
| Subsurface temperature | Nitrous oxide | Seagrass cover and composition |
| Surface currents | Stable carbon isotopes | Macroalgal canopy cover and composition |
| Subsurface currents | Dissolved organic carbon | Mangrove cover and composition |
| Sea surface salinity | Microbe biomass and diversity (*emerging) | |
| Subsurface salinity | Invertebrate abundance and distribution (*emerging) | |
| Ocean surface heat flux | ||
| Cross-disciplinary | ||
| Ocean color | ||
| Ocean sound | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosa, T.L.; Piecho-Santos, A.M.; Vettor, R.; Guedes Soares, C. Review and Prospects for Autonomous Observing Systems in Vessels of Opportunity. J. Mar. Sci. Eng. 2021, 9, 366. https://doi.org/10.3390/jmse9040366
Rosa TL, Piecho-Santos AM, Vettor R, Guedes Soares C. Review and Prospects for Autonomous Observing Systems in Vessels of Opportunity. Journal of Marine Science and Engineering. 2021; 9(4):366. https://doi.org/10.3390/jmse9040366
Chicago/Turabian StyleRosa, Teresa L., A. Miguel Piecho-Santos, Roberto Vettor, and C. Guedes Soares. 2021. "Review and Prospects for Autonomous Observing Systems in Vessels of Opportunity" Journal of Marine Science and Engineering 9, no. 4: 366. https://doi.org/10.3390/jmse9040366
APA StyleRosa, T. L., Piecho-Santos, A. M., Vettor, R., & Guedes Soares, C. (2021). Review and Prospects for Autonomous Observing Systems in Vessels of Opportunity. Journal of Marine Science and Engineering, 9(4), 366. https://doi.org/10.3390/jmse9040366