
Hydrodynamic Analysis of a Modular Floating Structure with Tension-Leg Platforms and Wave Energy Converters

Abstract
:1. Introduction
2. Numerical Model of the MTLPW
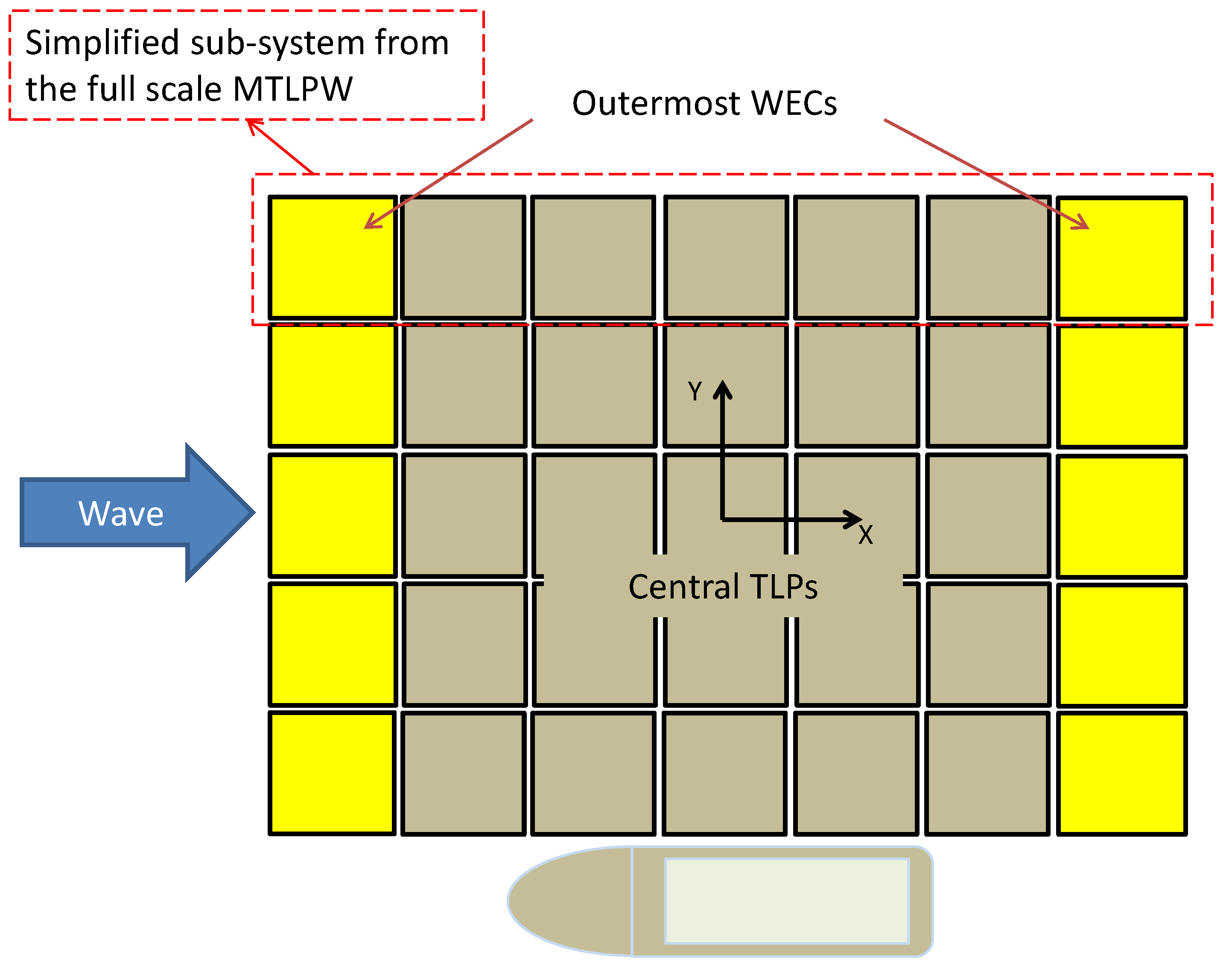
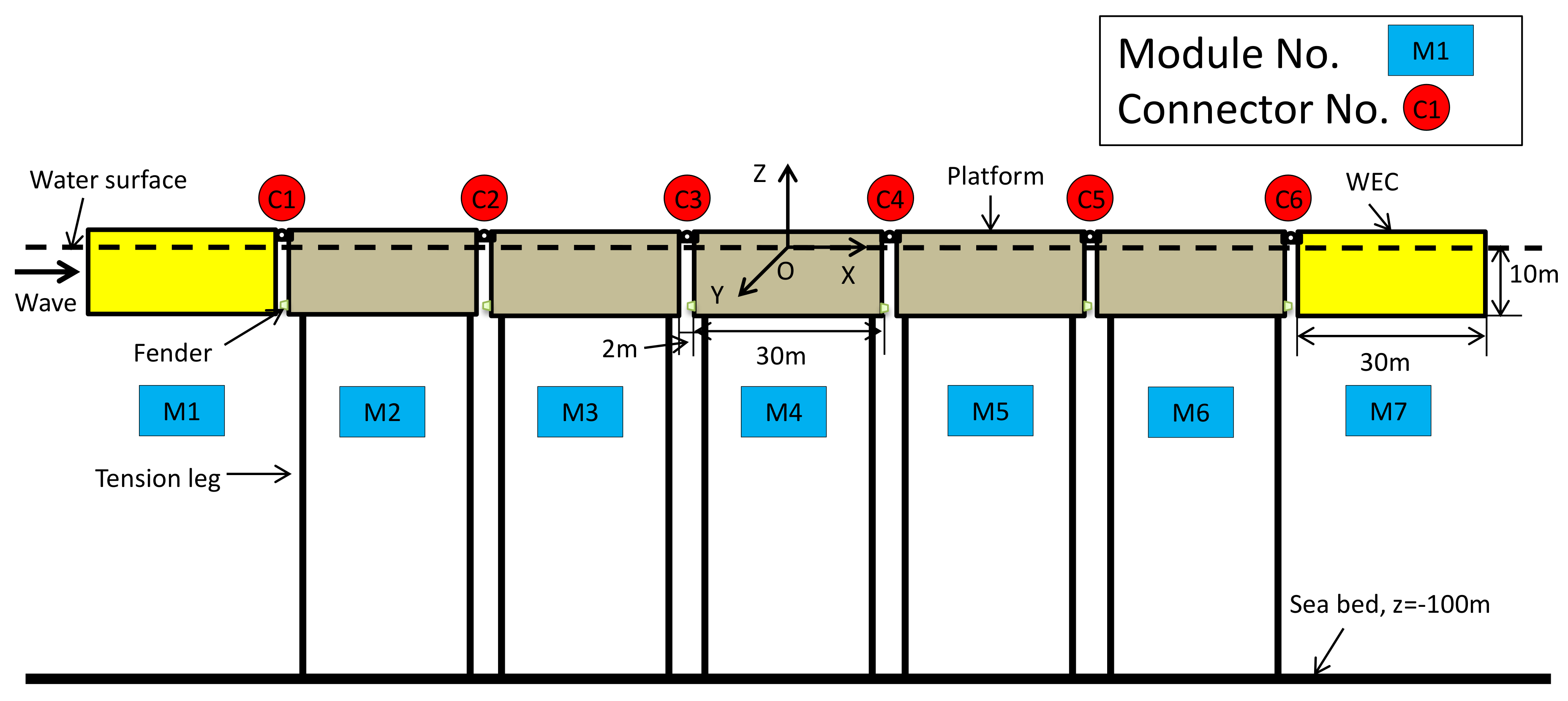
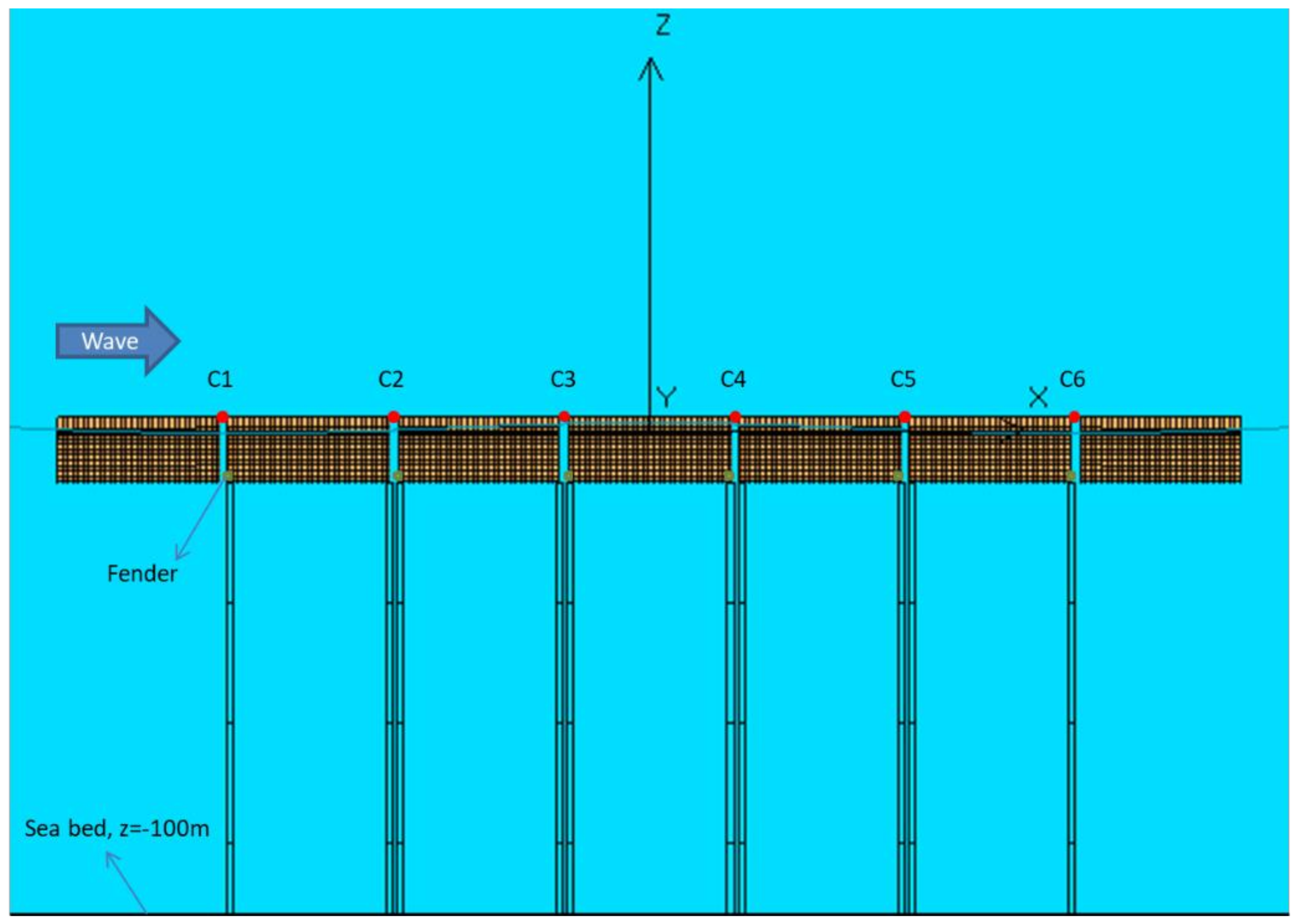
2.1. Description of the MTLPW
- (1)
- Each TLP module was initially designed to withstand about 2000t mass variation (available for TLP pretension range of 3000~5000 t), with 4 tension legs symmetrically distributed at the 4 corners and several anticollision devices installed at the bottom-corners. The anticollision devices serve as fenders with linear springs to monitor possible bottom impact forces.
- (2)
- Two outermost pitch-type WEC modules (M1 and M7) symmetrically connect to their adjacent outermost TLP modules (M2 and M6), respectively. The 2 outermost hinge-type connectors (denoted as C1 and C6) are coupled with WEC PTO systems, which can serve as linear hydraulic dampers to utilize the relative pitch motion between the outermost WEC module and its adjacent TLP module to produce power. It should be pointed out that different PTO damping levels (damping coefficients) of the WEC can be flexibly adjusted using the throttle valve in practice.
2.2. Governing Equation
2.3. Hydrodynamic Model
2.4. Connector Types
- (1)
- The fixed connector (denoted as Fixed): There is no relative motion in all degrees of freedom between 2 adjacent connected modules.
- (2)
- The hinge connector (denoted as Hinge): There is only freely relative pitch motion between 2 adjacent connected modules.
- (3)
- The hinge connector with an additional WEC linear pitch damper (Kp) (denoted as HWK): The additional damper can mitigate the relative pitch motion of 2 adjacent modules to some degree, and serves as the PTO system of the WEC module to generate power. The original pitch damping was designed to be 5.0 × 108 Nms/rad, and the design parameters for each HWK connector in the MTLPW system are the same. In addition, the HWK connector type for wave power production was only considered for the 2 outermost connectors (C1 and C6).
2.5. Estimation of Wave Power Production
3. Numerical Results
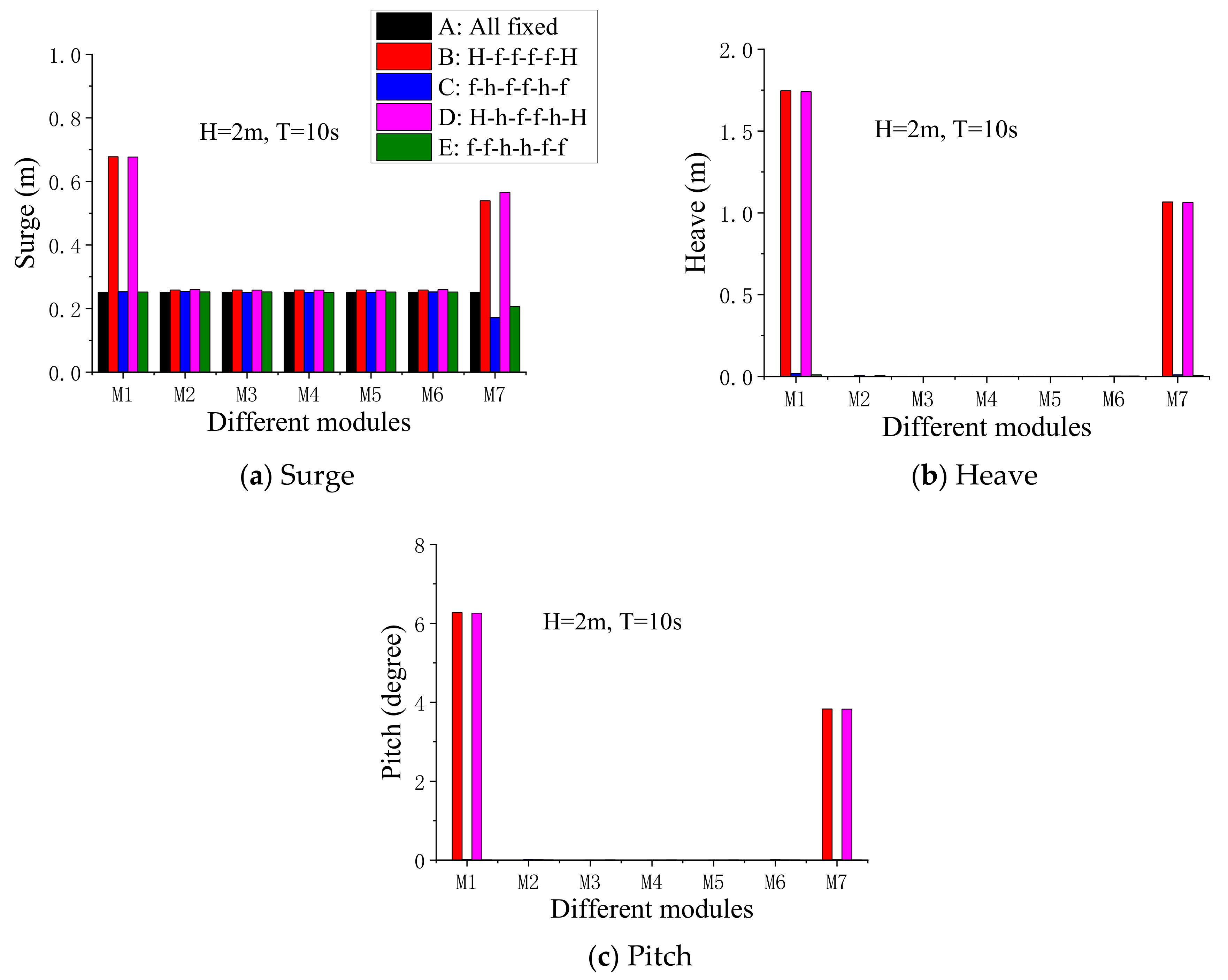
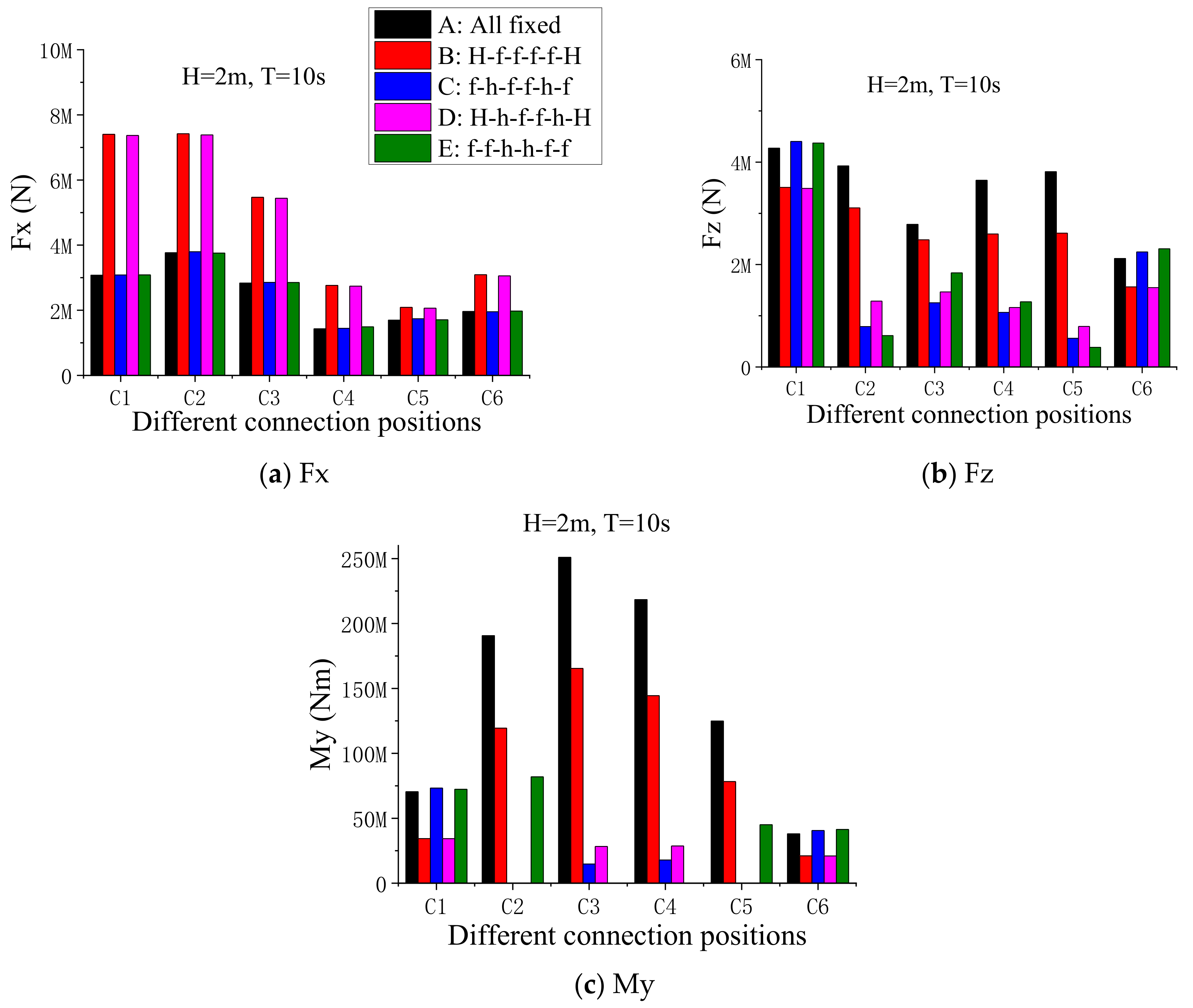
3.1. Effects of Different Connection Modes
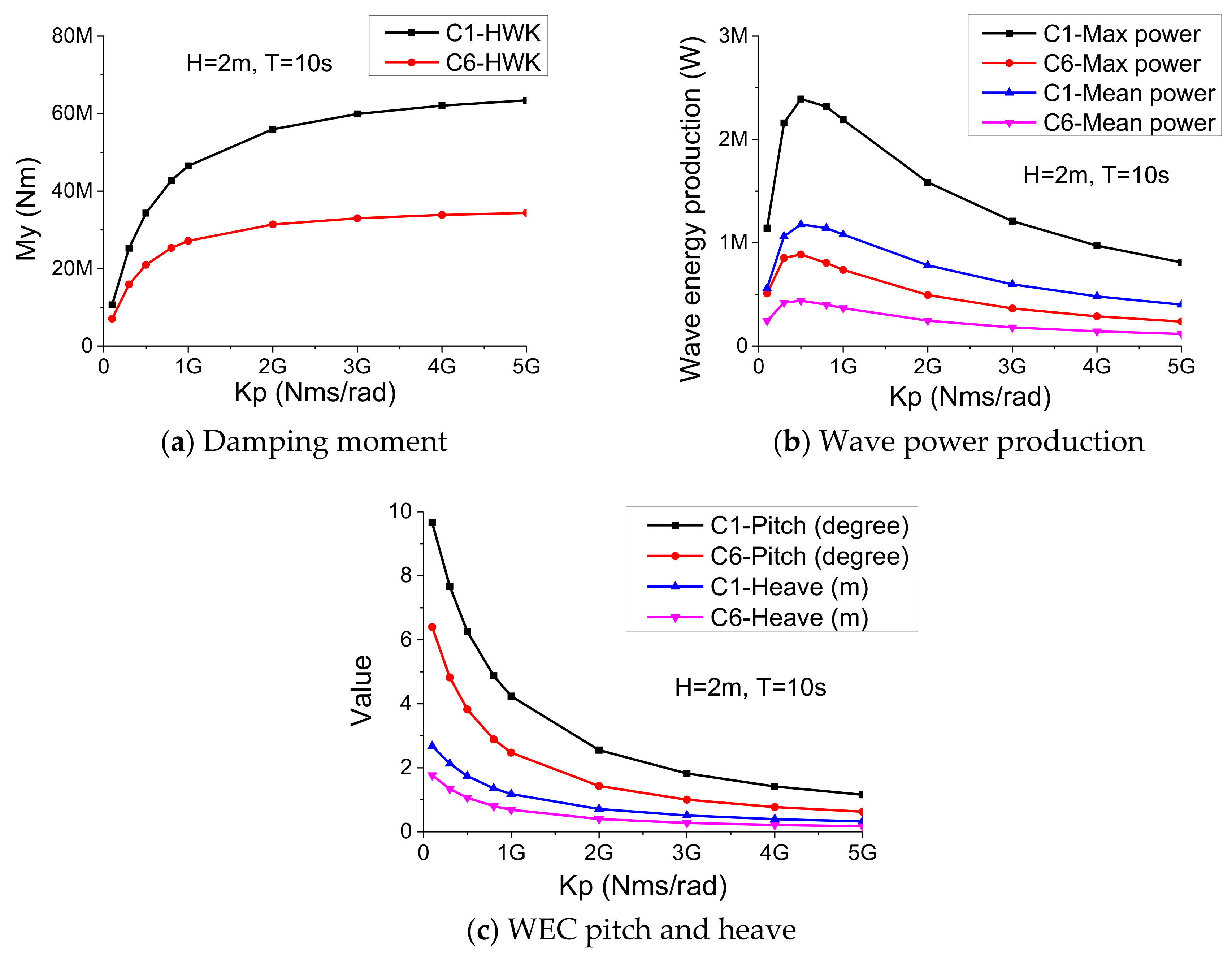
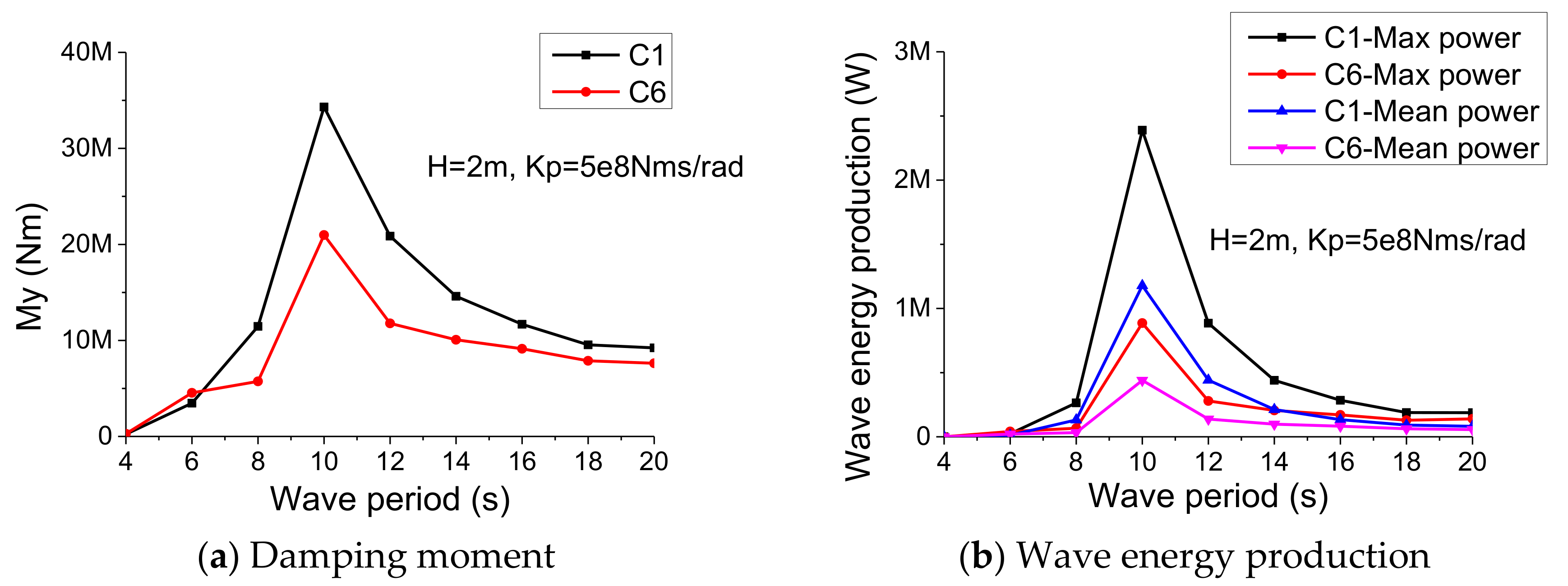
3.2. WEC Performance for Case D
3.3. Comparison of Two Suggested Connection Modes
3.4. The Number of the Inner TLP Modules
3.5. Extreme Sea Conditions
4. Conclusions
- (1)
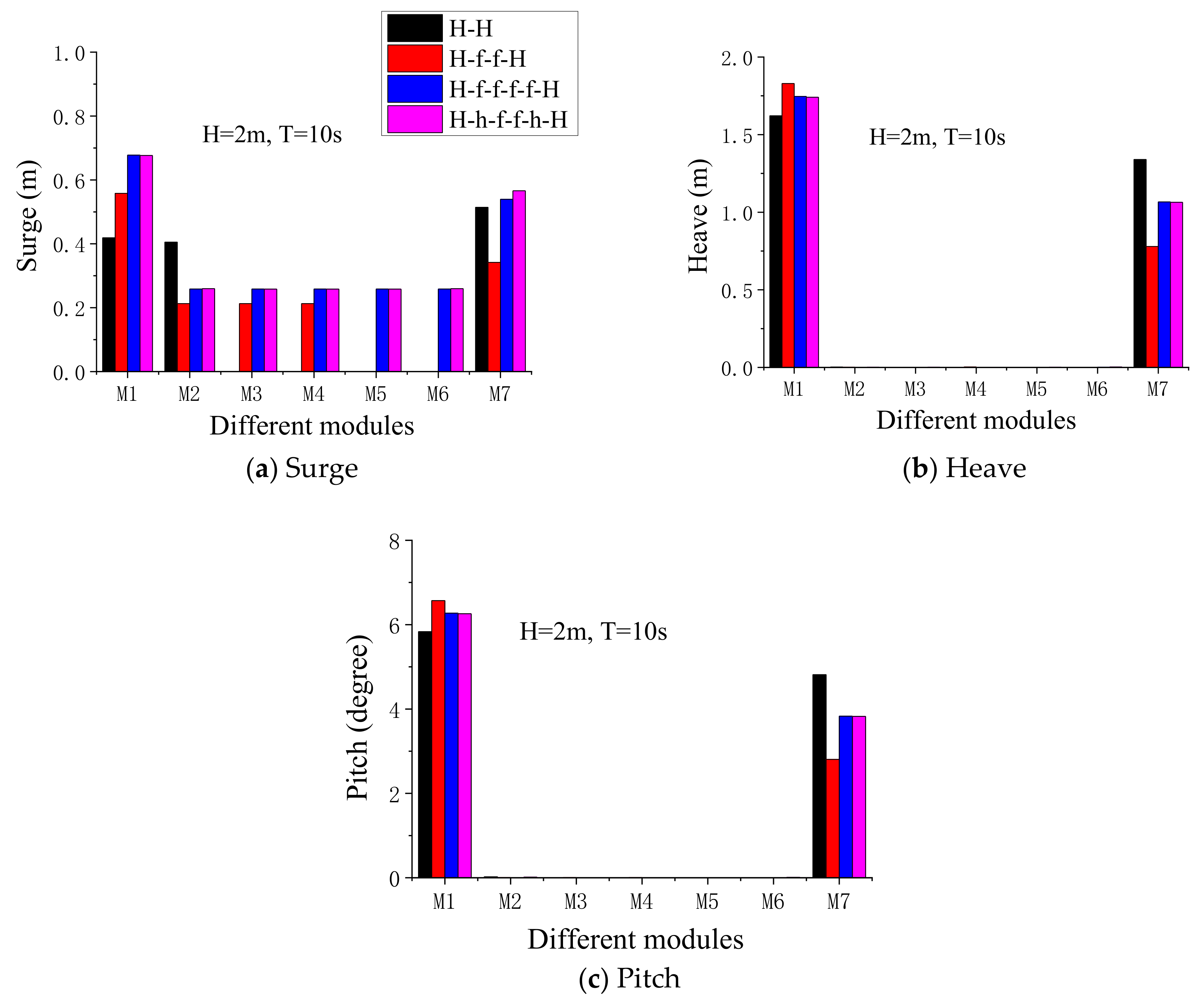
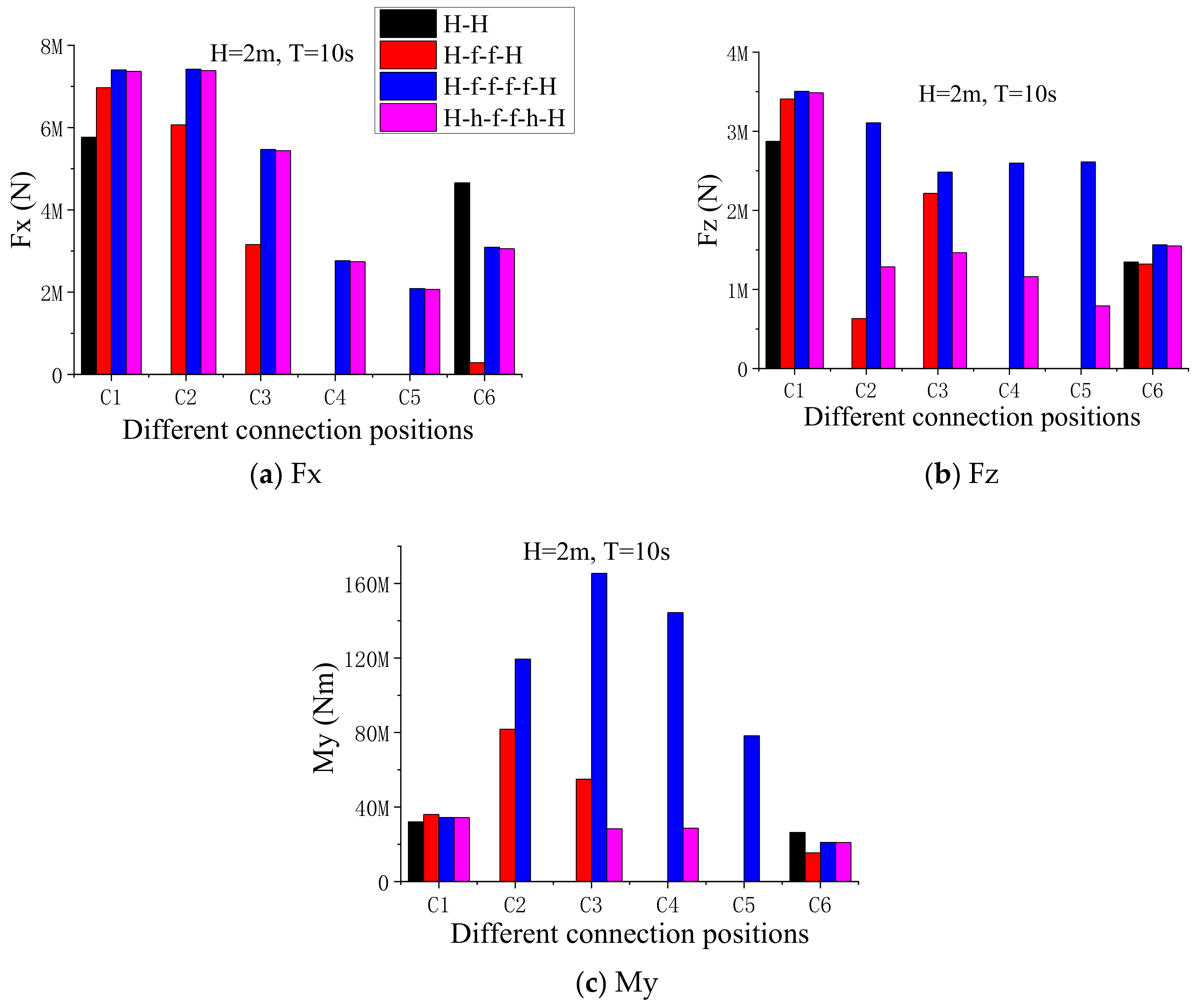
- For the seven-module MTLPW system, the amplitudes of the connectors’ Fx and Fz were more sensitive to the type of the outermost connectors than that of the inner connectors. The outermost HWK connector can effectively reduce the amplitudes of the connectors’ Fz and My and produce considerable wave power. The outermost fixed connector is effective for reducing the amplitudes of the connectors’ Fx and the motion responses of the WEC modules, as well as avoiding possible bottom collision accidents.
- (2)
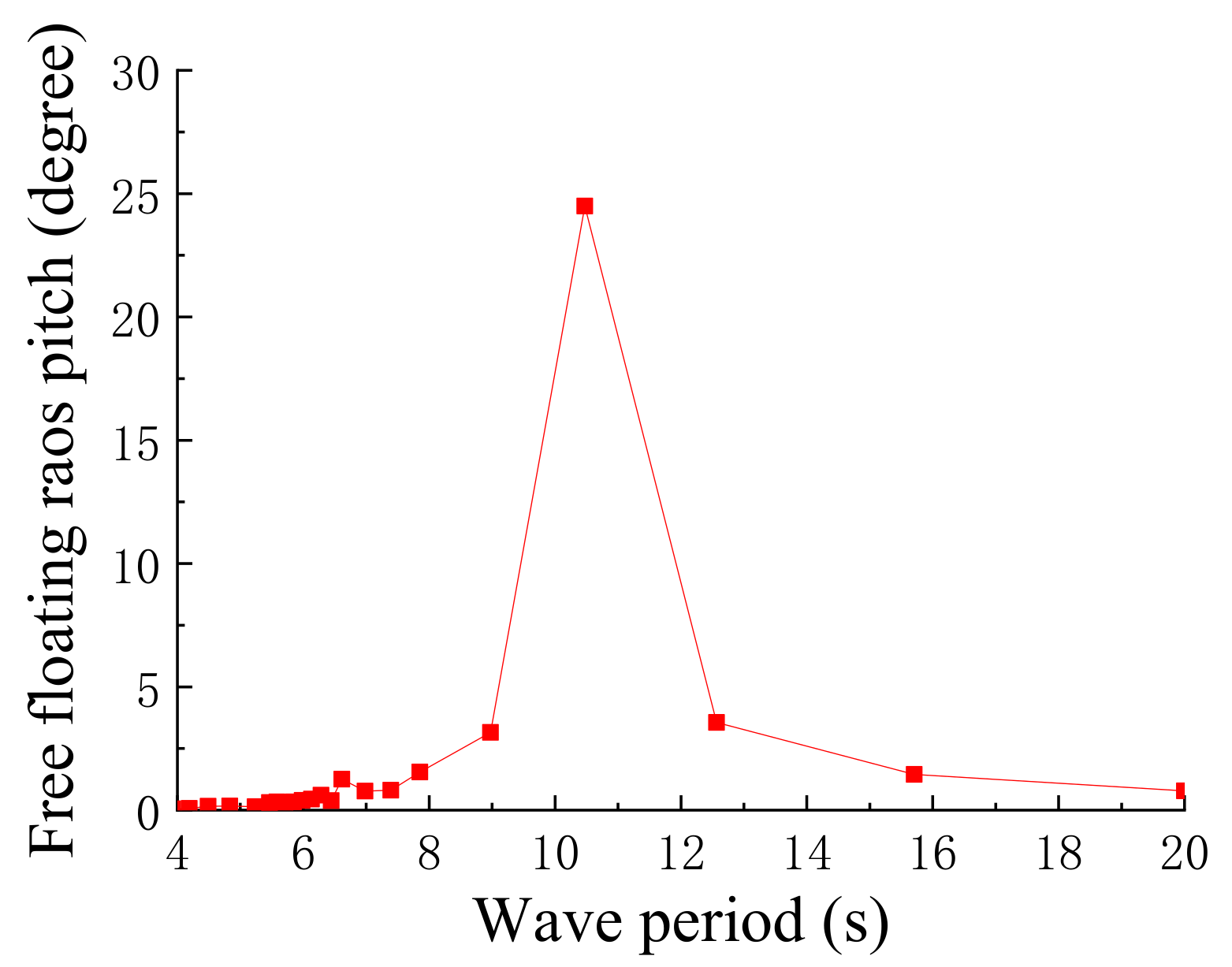
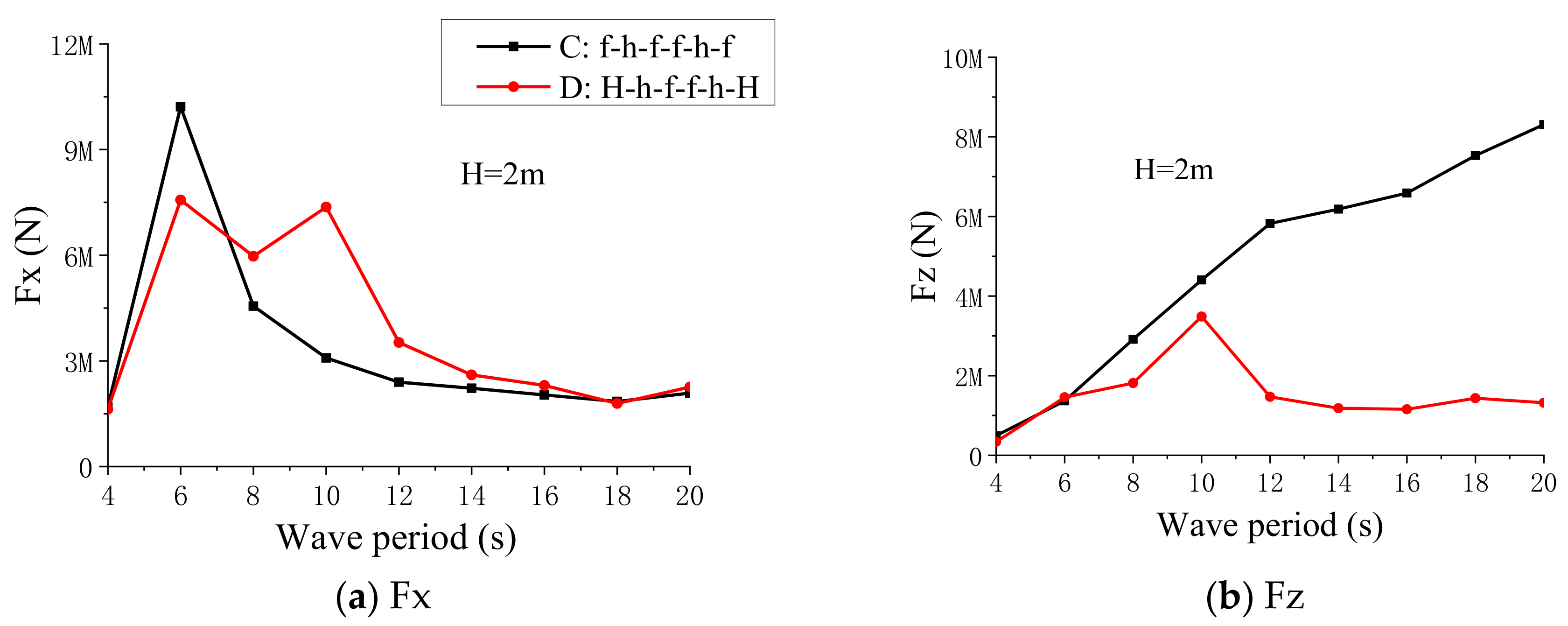
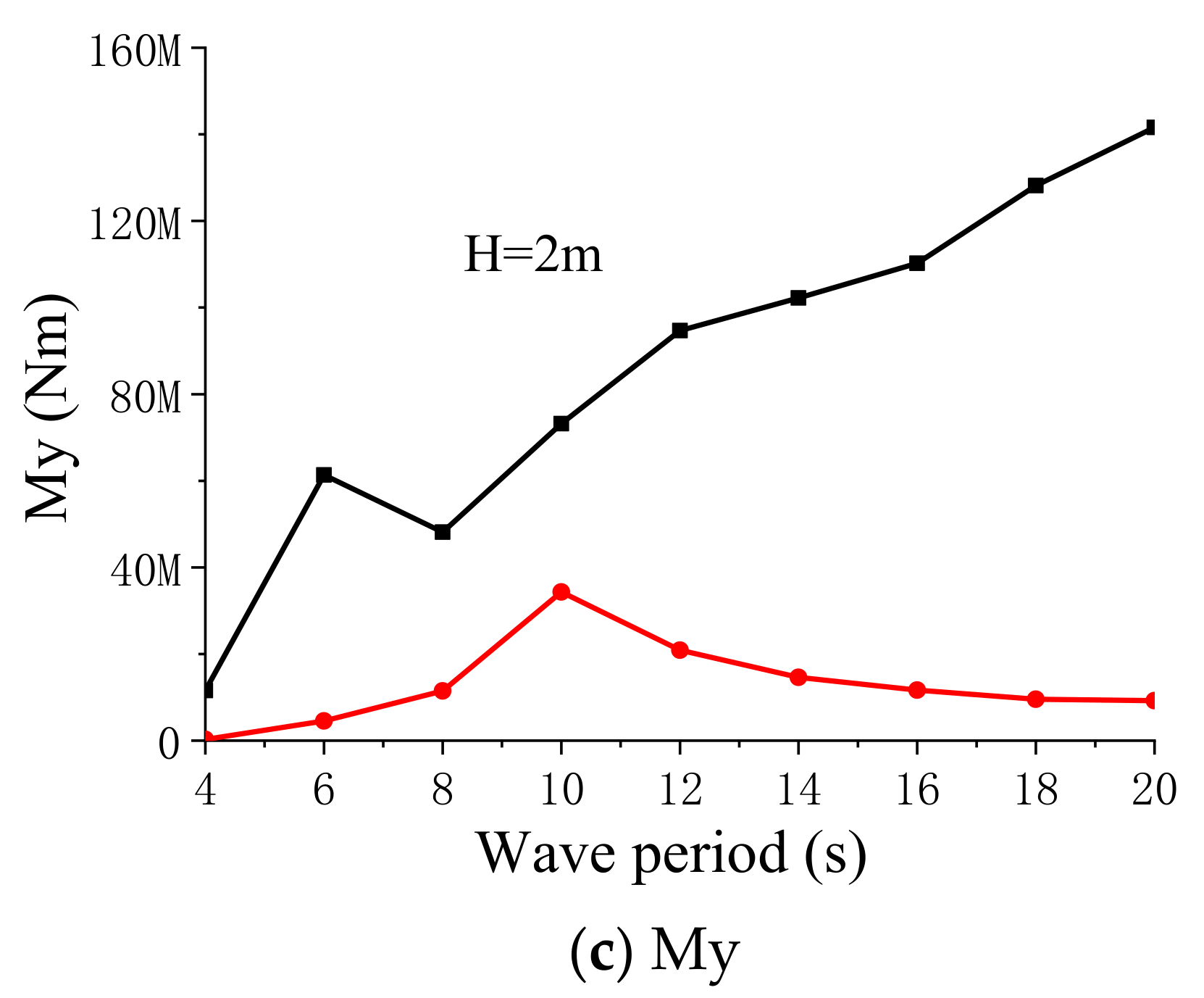
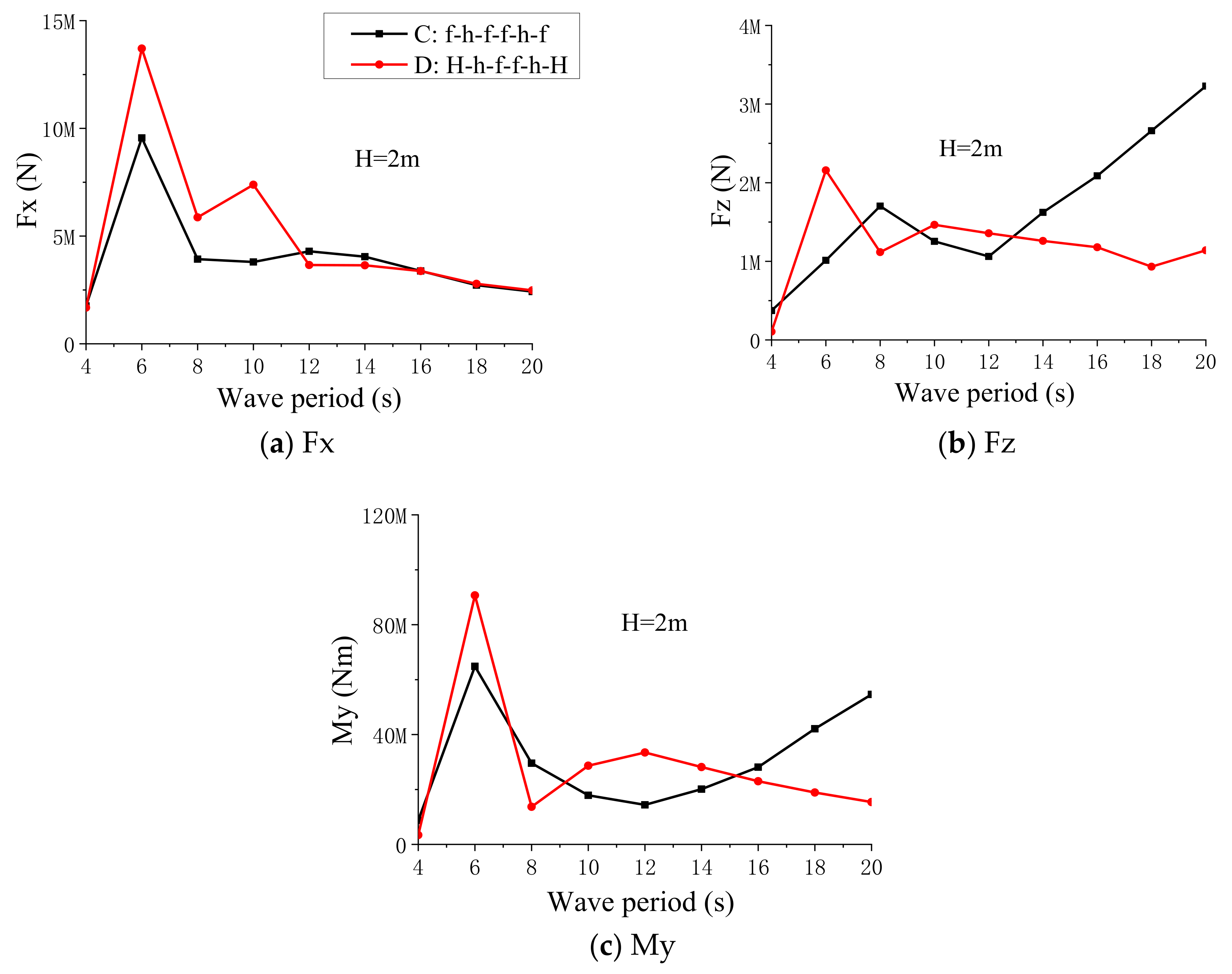
- Two suggested connection modes were proposed for the seven-module MTLPW system, which refer to Case C (f-h-f-f-h-f) and Case D (H-h-f-f-h-H). That is because they can effectively mitigate main hydrodynamic responses of the seven-module MTLPW system, especially for the connectors’ My. For Case D, the effect of the PTO damping level of the outermost HWK connector on the hydrodynamic performance of the seven-module MTLPW system was also clarified. The preliminary optimal PTO damping and corresponding optimal wave period for the outermost HWK connector were about 5.0 × 108 Nms/rad and 10 s, respectively.
- (3)
- The module’s motion responses and the connectors’ Fx and Fz loads for the seven-module MTLPW system were not very sensitive to more inner TLP modules, while the connectors’ My responses were significantly sensitive to the number of the continuously fixed modules. Maximum connectors’ My responses can be effectively limited by replacing certain fixed connectors with hinge connectors to reduce the number of the continuously fixed modules. Therefore, the number of the inner TLP modules of the MTLPW system can be flexibly expanded with the proper hinge connector strategy.
- (4)
- For the outermost HWK connector mode (Case D) under practical extreme sea conditions, the bottom impact accidents between the outermost WEC module and its adjacent TLP module may occur. However, the bottom impact accidents can be effectively avoided by properly enlarged the PTO damping level to reduce the relative pitch motion among modules. To balance the long-term safety and the wave power production of the proposed MTLPW system, the Case D* connection mode (with proper higher PTO damping) may be a promising for practical extreme sea conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| Ci | The i-th Connector |
| DOF | Degree of Freedom |
| FEA | Finite Element Analysis |
| HWK | Hinge connector with an additional WEC linear pitch damper (Kp) |
| JONSWAP | Joint North Sea Wave Project |
| Mi | The i-th Module |
| MOB | Mobile Offshore Base |
| MTLPW | Modular Tension Leg Platforms with Wave energy converters |
| OWC | Oscillating Water Column |
| PTO | Power Take-Off |
| RAO | Response Amplitude Operator |
| RMFC | Rigid-Module-Flexible-Connector |
| TLP | Tension Leg Platform |
| WEC | Wave Energy Converters |
| VLFS | Very Large Floating System |
References
- Suzuki, H. Safety target of very large floating structure used as a floating airport. Mar. Struct. 2001, 14, 103–113. [Google Scholar] [CrossRef]
- Rognaas, G.; Xu, J.; Lindseth, S.; Rosendahl, F. Mobile offshore base concepts. Concrete hull and steel topsides. Mar. Struct. 2001, 14, 5–23. [Google Scholar] [CrossRef]
- Wan, L.; Han, M.; Jin, J.; Zhang, C.; Magee, R.A.; Wang, C.M. Global dynamic response analysis of oil storage tank in finite water depth: Focusing on fender mooring system parameter design. Ocean Eng. 2018, 148, 247–262. [Google Scholar] [CrossRef]
- Shainee, M.; Ellingsen, H.; Leira, B.J.; Fredheim, A. Design theory in offshore fish cage designing. Aquaculture 2013, 392, 134–141. [Google Scholar] [CrossRef]
- Suzuki, H. Overview of Megafloat: Concept, design criteria, analysis, and design. Mar. Struct. 2005, 18, 111–132. [Google Scholar] [CrossRef]
- Cheng, Y.; Ji, C.; Zhai, G.; Oleg, G. Dual inclined perforated anti-motion plates for mitigating hydroelastic response of a VLFS under wave action. Ocean Eng. 2016, 121, 572–591. [Google Scholar] [CrossRef]
- Cheng, Y.; Ji, C.; Zhai, G.; Oleg, G. Fully nonlinear numerical investigation on hydroelastic responses of floating elastic plate over variable depth sea-bottom. Mar. Struct. 2017, 55, 37–61. [Google Scholar] [CrossRef]
- Kim, B.W.; Young Hong, S.; Kyoung, J.H.; Cho, S.K. Evaluation of bending moments and shear forces at unit connections of very large floating structures using hydroelastic and rigid body analyses. Ocean Eng. 2007, 34, 1668–1679. [Google Scholar] [CrossRef]
- Taylor, R.E. Hydroelastic analysis of plates and some approximations. J. Eng. Math. 2007, 58, 267–278. [Google Scholar] [CrossRef] [Green Version]
- Riggs, H.R.; Niimi, K.M.; Huang, L.L. Two Benchmark Problems for Three-Dimensional, Linear Hydroelasticity. J. Offshore Mech. Arctic Eng. 2007, 129, 149–157. [Google Scholar] [CrossRef]
- Kim, K.; Lee, P.; Park, K.C. A direct coupling method for 3D hydroelastic analysis of floating structures. Int. J. Numer. Methods Eng. 2013, 96, 842–866. [Google Scholar] [CrossRef]
- Riggs, H.R.; Ertekin, R.C. Approximate Methods for Dynamic Response of Multi-module Floating Structures. Mar. Struct. 1993, 6, 117–141. [Google Scholar] [CrossRef]
- Watanabe, E.; Utsunomiya, T.; Wang, C.M. Hydroelastic analysis of pontoon-type VLFS: A literature survey. Eng. Struct. 2004, 26, 245–256. [Google Scholar] [CrossRef]
- Wang, C.M.; Tay, Z.Y.; Takagi, K.; Utsunomiya, T. Literature Review of Methods for Mitigating Hydroelastic Response of VLFS Under Wave Action. Appl. Mech. Rev. 2010, 63, 30802. [Google Scholar] [CrossRef]
- Fu, S.; Moan, T.; Chen, X.; Cui, W. Hydroelastic analysis of flexible floating interconnected structures. Ocean Eng. 2007, 34, 1516–1531. [Google Scholar] [CrossRef]
- Wang, C.M.; Riyansyah, M.; Choo, Y.S. Reducing hydroelastic response of interconnected floating beams using semi-rigid connections. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May 31–5 June 2009. [Google Scholar]
- Gao, R.P.; Tay, Z.Y.; Wang, C.M.; Koh, C.G. Hydroelastic response of very large floating structure with a flexible line connection. Ocean Eng. 2011, 38, 1957–1966. [Google Scholar] [CrossRef]
- Michailides, C.; Loukogeorgaki, E.; Angelides, D.C. Response analysis and optimum configuration of a modular floating structure with flexible connectors. Appl. Ocean Res. 2013, 43, 112–130. [Google Scholar] [CrossRef]
- Paulling, J.R.; Tyagi, S. Multi-module Floating Ocean Structures. Mar. Struct. 1993, 6, 187–205. [Google Scholar] [CrossRef]
- Riggs, H.R.; Ertekin, R.C.; Mills, T.R.J. A comparative study of RMFC and FEA models for the wave-induced response of a MOB. Mar. Struct. 2000, 13, 217–232. [Google Scholar] [CrossRef]
- Xu, D.L.; Zhang, H.C.; Lu, C.; Qi, E.R.; Wu, Y.S. On Study of Nonlinear Network Dynamics of Flexibly Connected Multi-Module Very Large Floating Structures. In Vulnerability, Uncertainty, and Risk: Quantification, Mitigation, and Management; ASCE: Reston, VA, USA, 2014. [Google Scholar]
- Zhang, H.C.; Xu, D.L.; Lu, C.; Xia, S.Y.; Qi, E.R.; Hu, J.J.; Wu, Y.S. Network dynamic stability of floating airport based on amplitude death. Ocean Eng. 2015, 104, 129–139. [Google Scholar] [CrossRef]
- Xia, S.Y.; Xu, D.L.; Zhang, H.C.; Qi, E.R.; Wu, Y.S. On retaining a multi-module floating structure in an amplitude death state. Ocean Eng. 2016, 121, 134–142. [Google Scholar] [CrossRef]
- Zhang, H.C.; Xu, D.L.; Lu, C.; Qi, E.R.; Tian, C.; Wu, Y.S. Connection effect on amplitude death stability of multi-module floating airport. Ocean Eng. 2017, 129, 46–56. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, D.; Lu, C.; Xia, S.Y.; Qi, E.R.; Hu, J.J.; Wu, Y.S. Amplitude death of a multi-module floating airport. Nonlinear Dyn. 2015, 79, 2385–2394. [Google Scholar] [CrossRef]
- Shi, Q.J.; Zhang, H.C.; Xu, D.L.; Qi, E.R.; Tian, C.; Ding, J.; Wu, Y.S.; Lu, Y.; Li, Z.W. Experimental validation of network modeling method on a three-modular floating platform model. Coastal Eng. 2018, 137, 92–102. [Google Scholar] [CrossRef]
- Zhang, H.C.; Xu, D.L.; Xia, S.Y.; Qi, E.R.; Tian, C.; Wu, Y.S. Nonlinear network modeling of multi-module floating structures with arbitrary flexible connections. J. Fluids Struct. 2015, 59, 270–284. [Google Scholar] [CrossRef]
- Ren, N.X.; Zhang, C.; Magee, A.R.; Hellan, O.; Dai, J.; Ang, K.K. Hydrodynamic analysis of a modular multi-purpose floating structure system with different outermost connector types. Ocean Eng. 2019, 176, 158–168. [Google Scholar] [CrossRef]
- Zhang, H.C.; Xu, D.L.; Ding, R.; Zhao, H.; Lu, Y.; Wu, Y.S. Embedded Power Take-Off in hinged modularized floating platform for wave energy harvesting and pitch motion suppression. Renew. Energy 2019, 138, 1176–1188. [Google Scholar] [CrossRef]
- Mazarakos, T.; Konispoliatis, D.; Katsaounis, G.M.; Polyzos, S.; Mavrakos, S.A. Numerical and experimental studies of a multi-purpose floating TLP structure for combined wind and wave energy exploitation. Mediterr. Mar. Sci. 2019, 20, 745–763. [Google Scholar] [CrossRef] [Green Version]
- Michele, S.; Renzi, E.; Perez-Collazo, C.; Greaves, D.; Lglesias, G. Power extraction in regular and random waves from an OWC in hybrid wind-wave energy systems. Ocean Eng. 2019, 191, 106519. [Google Scholar] [CrossRef]
- Ren, N.X.; Wu, H.B.; Ma, Z.; Ou, J.P. Hydrodynamic analysis of a novel modular floating structure system with central tension-leg platforms. Ships Offshore Struct. 2019. [Google Scholar] [CrossRef]
- ANSYS, Inc. ANSYS AQWA User’s Manual; ANSYS, Inc.: Cannonsburg, PA, USA, 2010. [Google Scholar]
- Ren, N.X.; Li, Y.G.; Ou, J.P. The wind-wave tunnel test of a tension-leg platform type floating offshore wind turbine. J. Renew. Sustain. Energy 2012, 4, 63117. [Google Scholar] [CrossRef]
- Ren, N.X.; Li, Y.G.; Ou, J.P. Coupled wind-wave time domain analysis of floating offshore wind turbine based on Computational Fluid Dynamics method. J. Renew. Sustain. Energy 2014, 6, 23106. [Google Scholar] [CrossRef]
- Bachynski, E.E. Design and Dynamic Analysis of Tension Leg Platform Wind Turbines. Ph.D. Thesis, Norwegian University of Technology, Trondheim, Norway, 2014. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Units |
|---|---|---|
| Inner TLP module | ||
| Dimension | 30 × 30 × 12 | m |
| Draft | 10.0 | m |
| Water depth | 100.0 | m |
| Mass; Displacement | 4225; 9225 | t |
| Total TLP pretension | 5000 | t |
| Height of mass center | −7.34 | m |
| Ixx = Iyy, Izz | 6.0 × 108; 6.8 × 108 | Kg·m2 |
| Tension leg dimension | D = 1.2; t = 0.04; L = 90 | m |
| Steel tension leg E; σs | 2.1 × 1011; 3.45 × 108 | N/m2 |
| Stiffness of bottom fenders | 1.0 × 107 | N/m |
| Outer WEC module | ||
| Dimension | 30 × 30 × 12 | m |
| Draft | 10.0 | m |
| Mass = displacement | 9225 | t |
| Height of mass center | −4 | m |
| Ixx = Iyy, Izz | 1.4 × 109, 2.0 × 109 | kg·m2 |
| Adjacent distance | 2.0 | m |
| WEC PTO damping | 5.0 × 108 | Nms/rad |
| Case Name | Connection Mode |
|---|---|
| A | All fixed |
| B | H-f-f-f-f-H |
| C | f-h-f-f-h-f |
| D | H-h-f-f-h-H |
| E | f-f-h-h-f-f |
| Parameter Connector Mode | Fx (MN) | Fz (MN) | My (MNm) | WEC Pitch (Degree) | WEC Heave (m) | WEC Power (MW) |
|---|---|---|---|---|---|---|
| Case C | ||||||
| Max | 12.6 (C2) | 13.6(C1) | 224.0 (C1) | 0.08 | 0.06 | ---- |
| Mean | 2.87 | 2.82 | 48.2 | 0.02 | ---- | ---- |
| STD | 2.17 | 2.19 | 37.2 | 0.01 | 0.01 | ---- |
| Case D Kp = 5 × 108 Nms/rad | ||||||
| Max | 20.5 (C1) | 9.35 (C1) | 125.0 (C3) | 14.54 | 3.79 | 26.8 |
| Mean | 4.70 | 1.78 | 25.2 | 3.46 | ---- | 2.30 |
| STD | 3.51 | 1.42 | 19.4 | 2.65 | 1.21 | 1.62 |
| Case D* Kp = 2 × 109 Nms/rad | ||||||
| Max | 16.0 (C1) | 10.1 (C1) | 150.0 (C1) | 7.53 | 2.01 | 22.4 |
| Mean | 3.66 | 2.21 | 35.3e7 | 1.65 | ---- | 1.99 |
| STD | 2.78 | 1.70 | 27.1e7 | 1.27 | 0.58 | 1.41 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, N.; Wu, H.; Liu, K.; Zhou, D.; Ou, J. Hydrodynamic Analysis of a Modular Floating Structure with Tension-Leg Platforms and Wave Energy Converters. J. Mar. Sci. Eng. 2021, 9, 424. https://doi.org/10.3390/jmse9040424
Ren N, Wu H, Liu K, Zhou D, Ou J. Hydrodynamic Analysis of a Modular Floating Structure with Tension-Leg Platforms and Wave Energy Converters. Journal of Marine Science and Engineering. 2021; 9(4):424. https://doi.org/10.3390/jmse9040424
Chicago/Turabian StyleRen, Nianxin, Hongbo Wu, Kun Liu, Daocheng Zhou, and Jinping Ou. 2021. "Hydrodynamic Analysis of a Modular Floating Structure with Tension-Leg Platforms and Wave Energy Converters" Journal of Marine Science and Engineering 9, no. 4: 424. https://doi.org/10.3390/jmse9040424