
Step Approximation for Water Wave Scattering by Multiple Thin Barriers over Undulated Bottoms




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
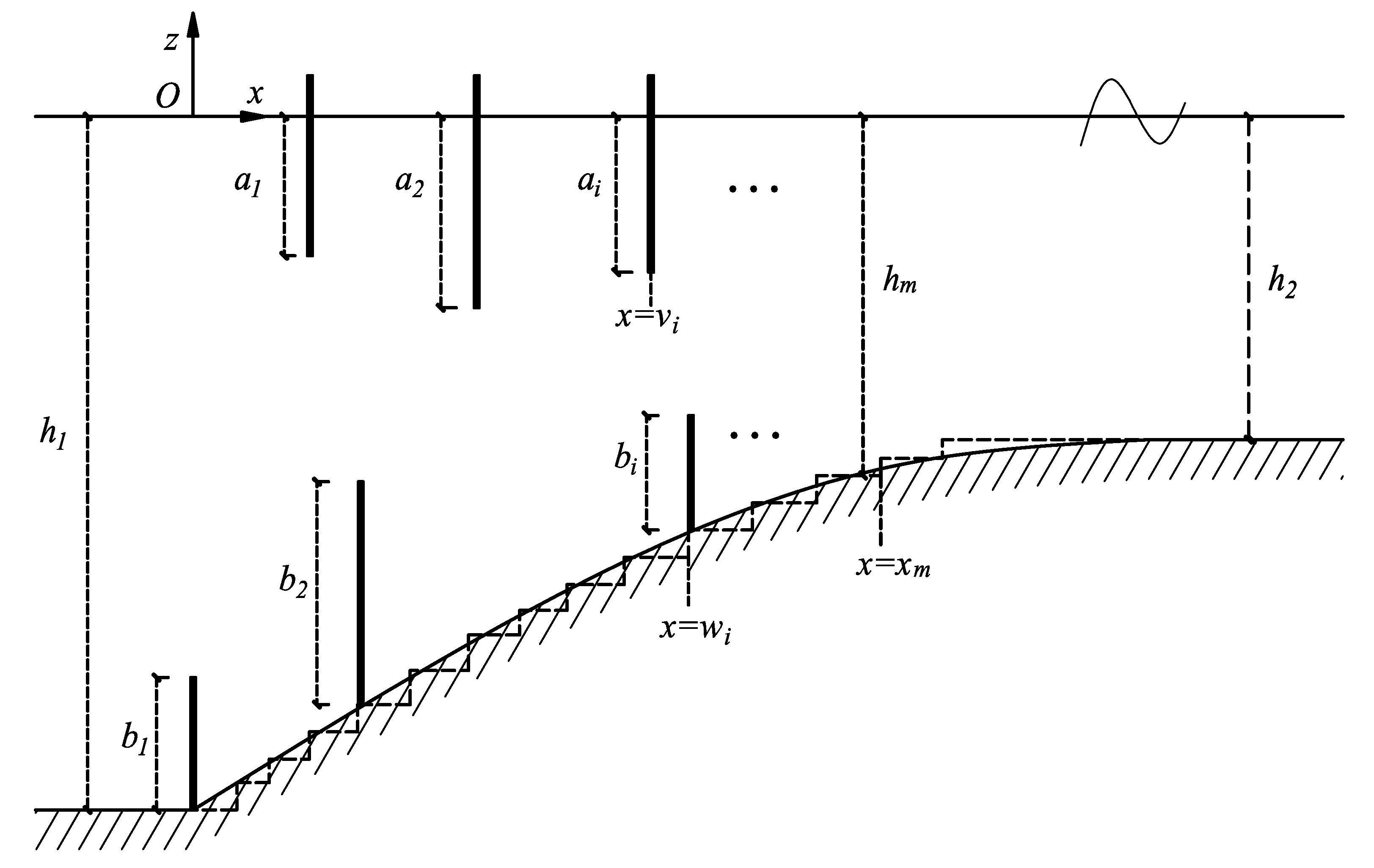
2.1. The Mathematical Model
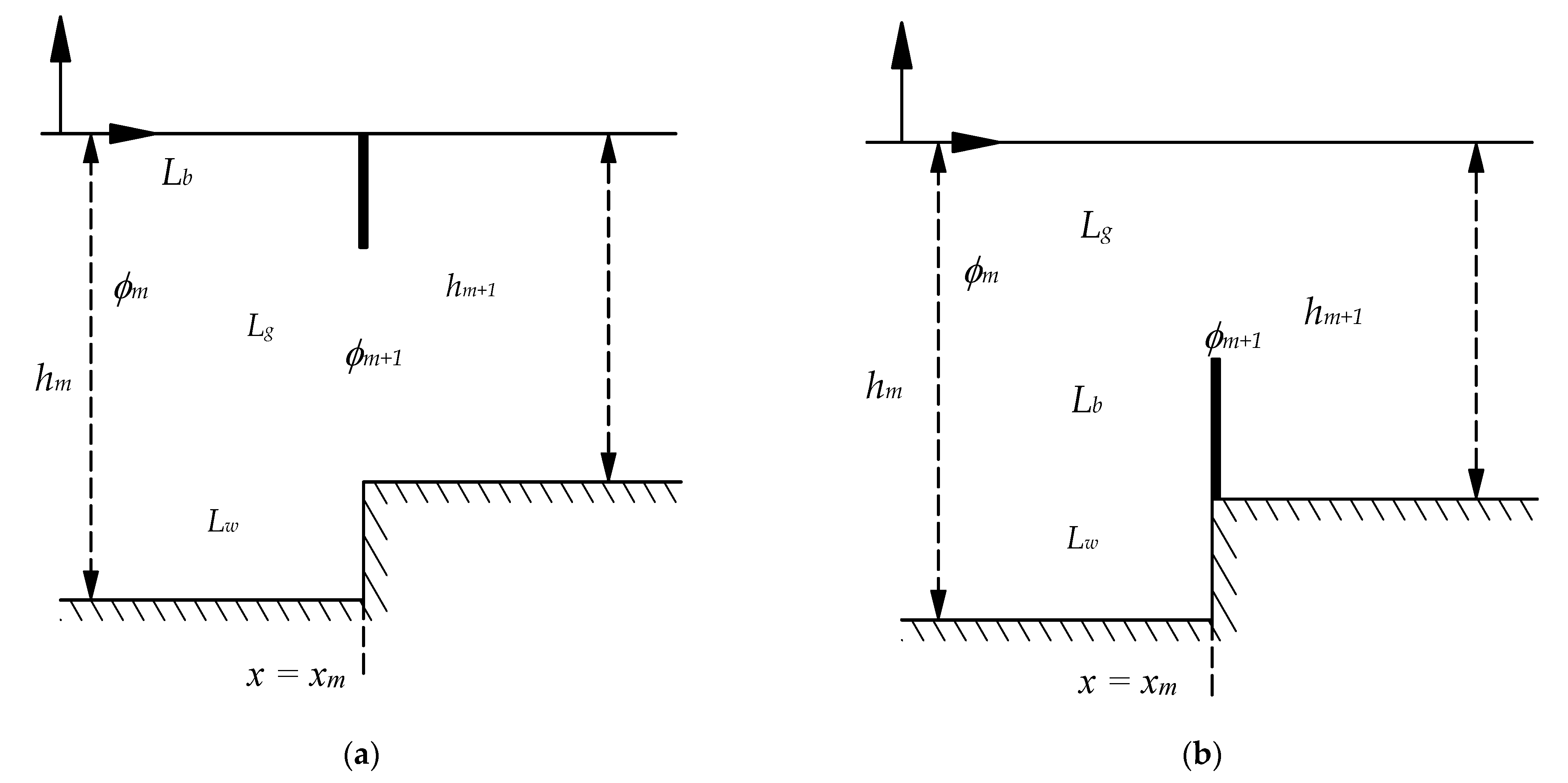
2.2. Eigenfuction Matching Method (EMM)
3. Results
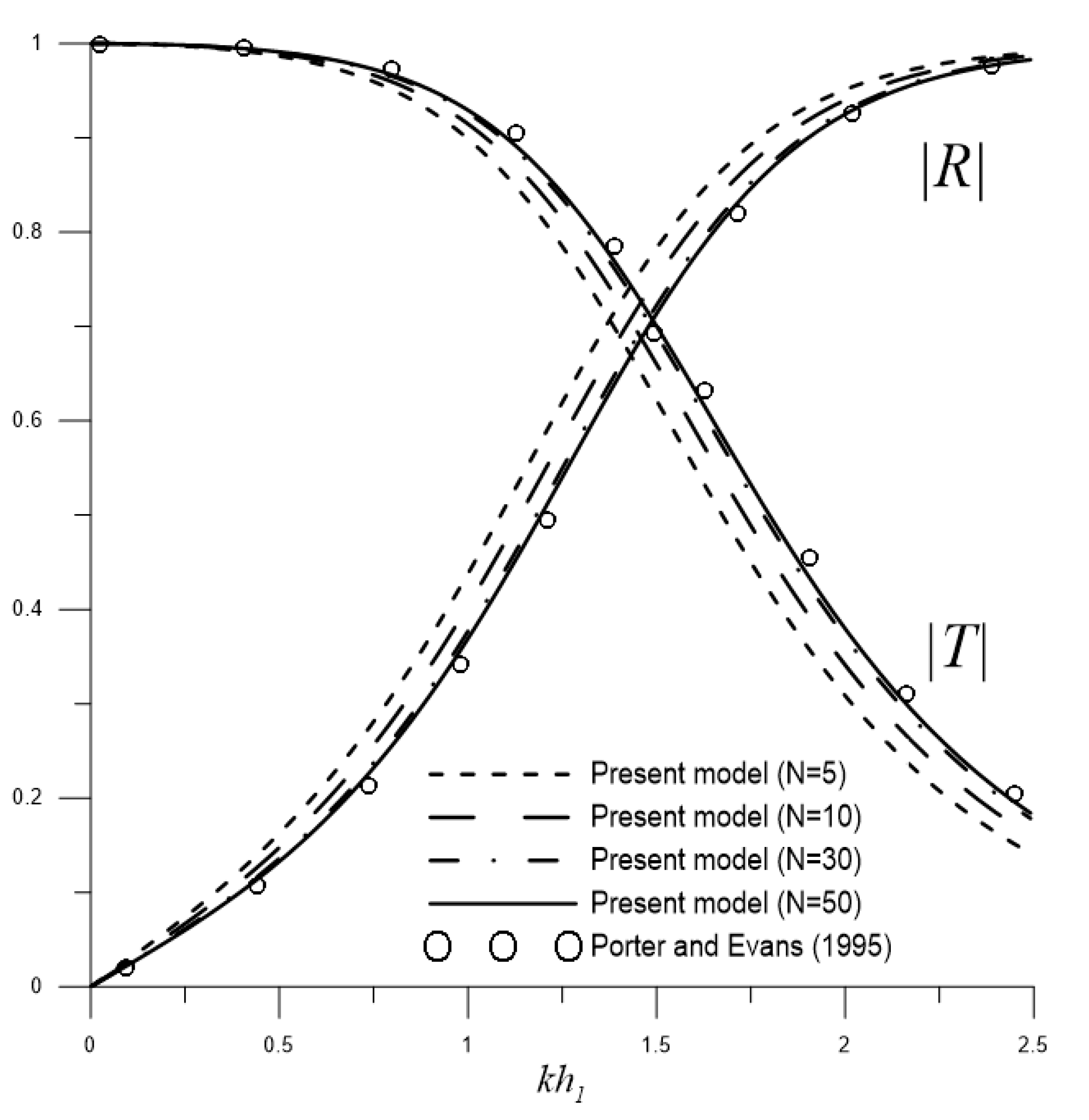
3.1. Water Wave Scattering by a Single Barrier over Flat-Bottom Topography
3.2. Water Wave Scattering by Barriers over Step-Type Bottom Topography
3.3. Water Wave Scattering over Undulated Slope Bottom
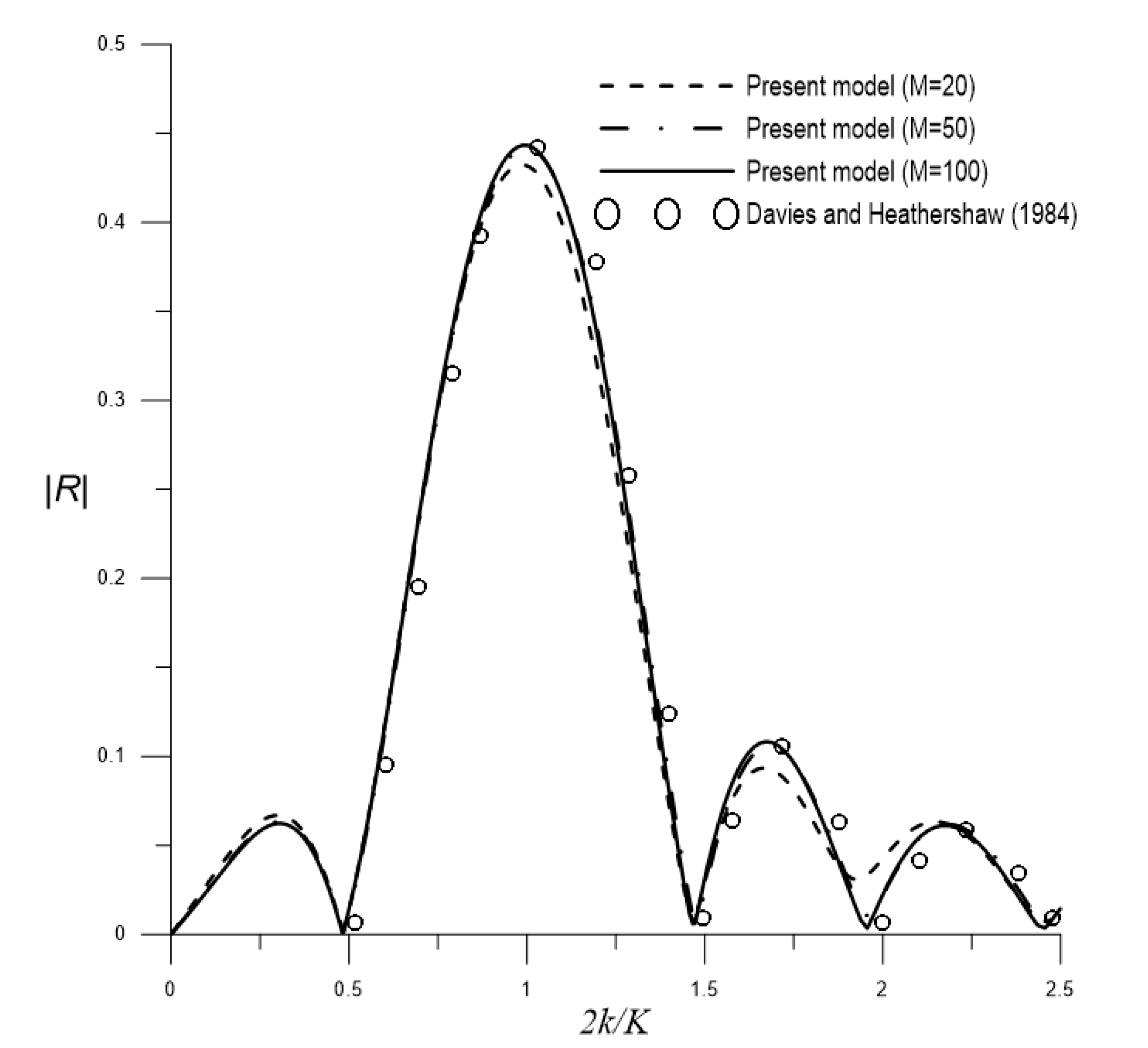
3.4. Water Wave Scattering over the Sinusoidal Rippled Bottom
4. Discussion
4.1. Combined Effects of Thin Barriers and Undulated Slope Bottom
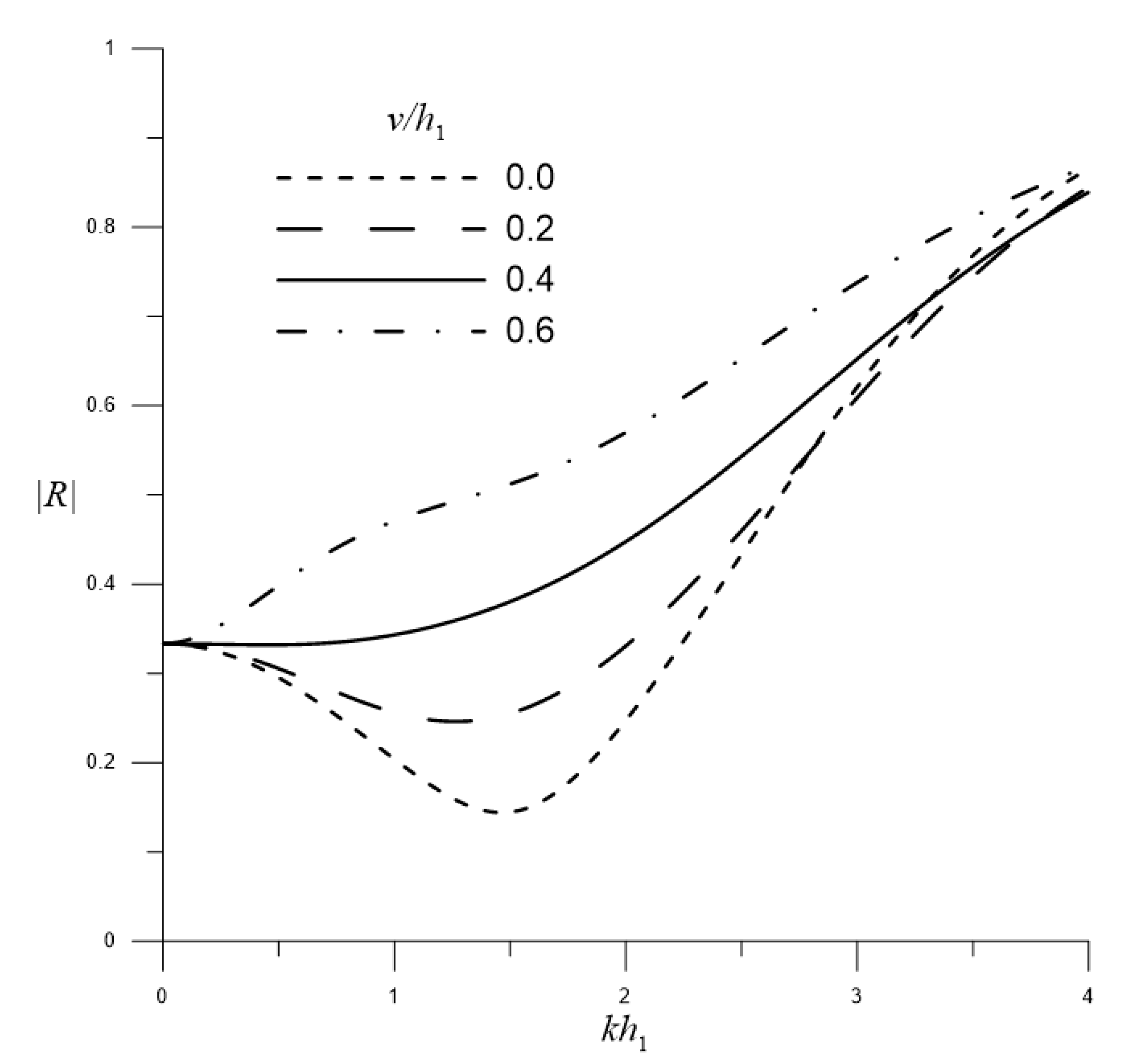
4.1.1. A Surface-Piercing Barrier
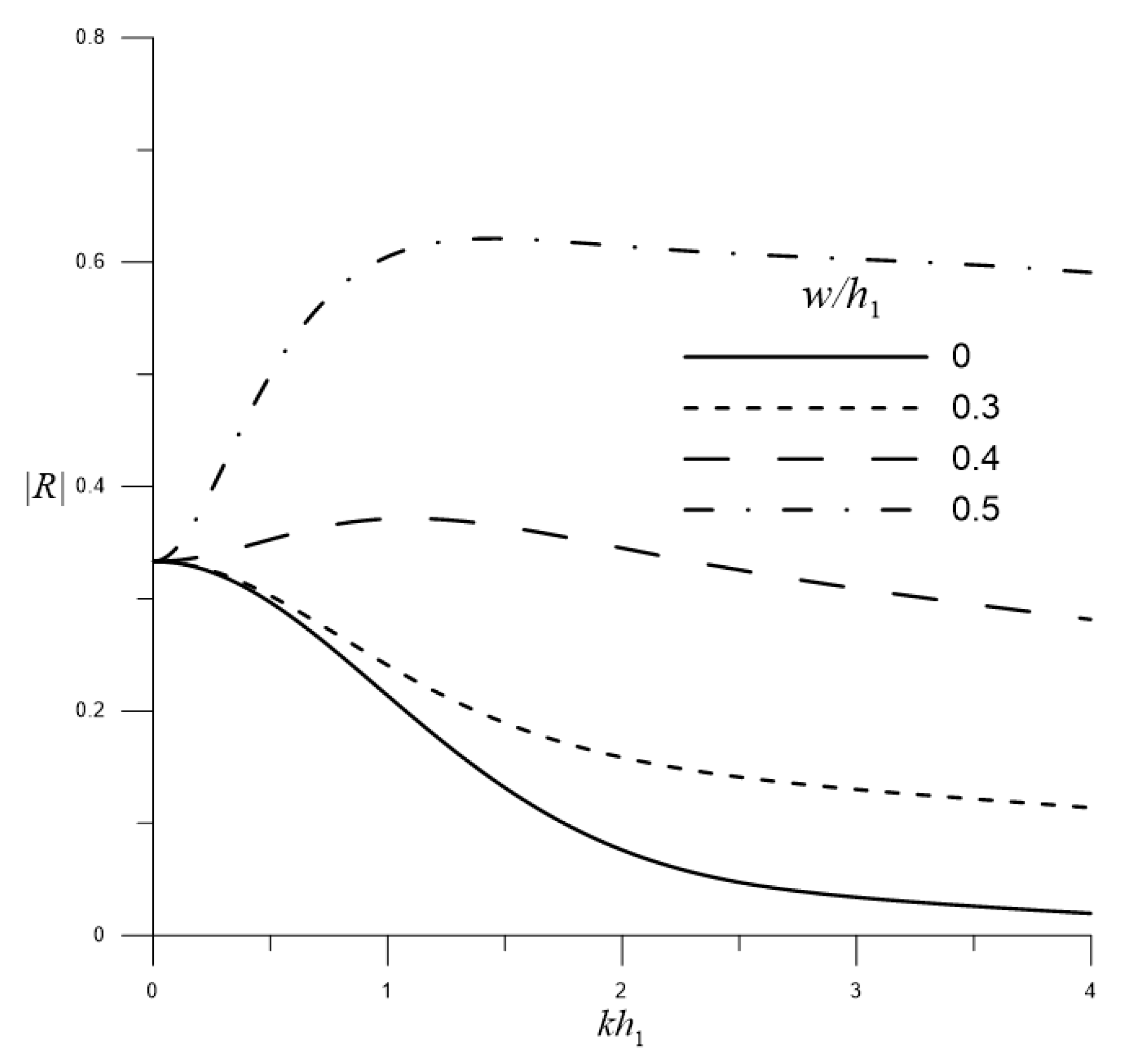
4.1.2. A Bottom-Standing Barrier
4.1.3. Combined Effects of Surfacing-Piecing and Bottom-Standing Barriers
4.1.4. Effect of Oblique Water Waves
4.2. Combined Effects of Thin Barriers and Sinusoidal Rippled Bottom
4.2.1. A Single Surface-Piecing or Bottom-Standing Barrier
4.2.2. Enhanced Bragg Resonance by Dual Periodic Barriers and Sinusoidal Rippled Bottom
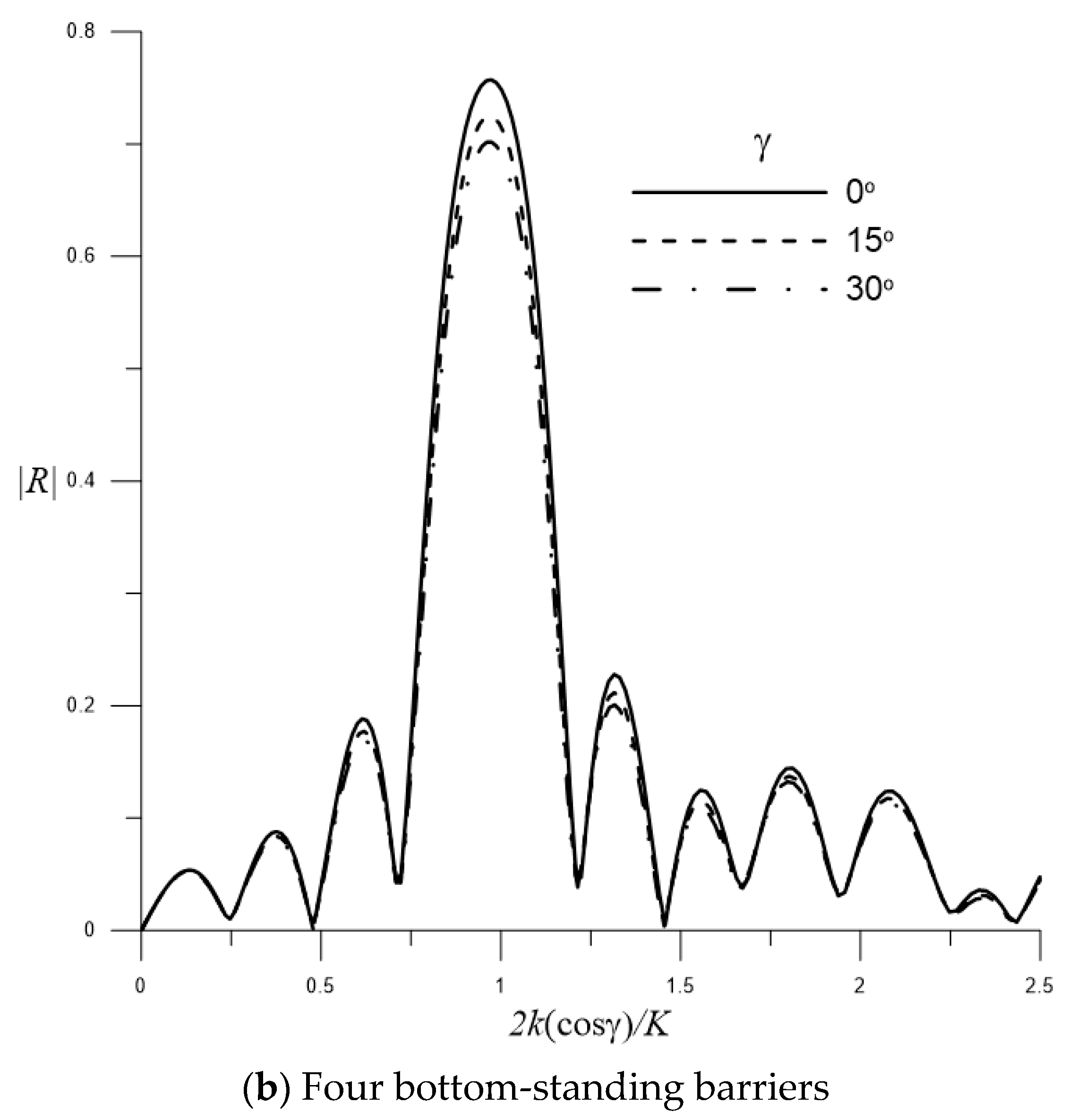
4.2.3. Enhanced Bragg Resonance by Four Periodic Barriers and Sinusoidal Rippled Bottom
4.2.4. Enhanced Bragg Resonance by Multiple Barriers and Sinusoidal Rippled Bottom under Effects of Oblique Water Waves
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Davies, A.; Heathershaw, A. Surface-wave propagation over sinusoidally varying topography. J. Fluid Mech. 1984, 144, 419–443. [Google Scholar] [CrossRef]
- Davies, A.G. The reflection of wave energy by undulations on the seabed. Dyn. Atmos. Oceans 1982, 6, 207–232. [Google Scholar] [CrossRef]
- Dolai, P. Oblique water wave diffraction by a step. Int. J. Appl. Mech. Eng. 2017, 22. [Google Scholar] [CrossRef]
- Kirby, J.T. A general wave equation for waves over rippled beds. J. Fluid Mech. 1986, 162, 171–186. [Google Scholar] [CrossRef]
- Losada, I.J.; Losada, M.A.; Roldán, A. Propagation of oblique incident waves past rigid vertical thin barriers. Appl. Ocean Res. 1992, 14, 191–199. [Google Scholar] [CrossRef]
- Losada, M.A.; Losada, I.J.; Roldán, A.J. Propagation of oblique incident modulated waves past rigid, vertical thin barriers. Appl. Ocean Res. 1993, 15, 305–310. [Google Scholar] [CrossRef]
- Losada, I.J.; Losada, M.A.; Losada, R. Wave spectrum scattering by vertical thin barriers. Appl. Ocean Res. 1994, 16, 123–128. [Google Scholar] [CrossRef]
- Abul-Azm, A.G. Wave diffraction through submerged flexible breakwaters. Ocean Eng. 1996, 23, 403–422. [Google Scholar] [CrossRef]
- Porter, R.; Evans, D.V. Complementary approximations to wave scattering by vertical barriers. J. Fluid Mech. 1995, 294, 155–180. [Google Scholar] [CrossRef]
- Das, P.; Dolai, D.P.; Mandal, B.N. Oblique wave diffraction by parallel thin vertical barriers with gaps. J. Waterw. Port Coast. Ocean Eng. 1997, 123, 163–171. [Google Scholar] [CrossRef]
- Roy, R.; De, S.; Mandal, B.N. Water wave scattering by two surface-piercing and one submerged thin vertical barriers. Arch. Appl. Mech. 2018, 88, 1477–1489. [Google Scholar] [CrossRef]
- Wang, L.-X.; Deng, Z.-Z.; Wang, C.; Wang, P. Scattering of oblique water waves by two unequal surface-piercing vertical thin plates with stepped bottom topography. China Ocean Eng. 2018, 32, 524–535. [Google Scholar] [CrossRef]
- Berkhoff, J.C.W. Computation of Combined Refraction-Diffraction. In Proceedings of the 13th International Conference on Coastal Engineering, Vancouver, BC, Canada, 10–14 July 1972; pp. 471–490. [Google Scholar]
- Belibassakis, K.; Athanassoulis, G. Extension of second-order stokes theory to variable bathymetry. J. Fluid Mech. 2002, 464. [Google Scholar] [CrossRef]
- Belibassakis, K.; Touboul, J. A nonlinear coupled-mode model for waves propagating in vertically sheared currents in variable bathymetry—Collinear waves and currents. Fluids 2019, 4, 61. [Google Scholar] [CrossRef]
- Belibassakis, K.A. A coupled-mode model for the scattering of water waves by shearing currents in variable bathymetry. J. Fluid Mech. 2007, 578, 413–434. [Google Scholar] [CrossRef]
- Toledo, Y.; Agnon, Y. A scalar form of the complementary mild-slope equation. J. Fluid Mech. 2010, 656, 407–416. [Google Scholar] [CrossRef]
- Takano, K. Effets d’un obstacle parallelepipedique sur la propagation de la houle. La Houille Blanche 1960, 15, 247–267. [Google Scholar] [CrossRef]
- Mei, C.C.; Black, J.L. Scattering of surface waves by rectangular obstacles in waters of finite depth. J. Fluid Mech. 1969, 38, 499–511. [Google Scholar] [CrossRef]
- Kirby, J.T.; Dalrymple, R.A. Propagation of obliquely incident water waves over a trench. J. Fluid Mech. 1983, 133, 47–63. [Google Scholar] [CrossRef]
- Kirby, J.T.; Dalrymple, R.A.; Seo, S.N. Propagation of obliquely incident water waves over a trench. Part 2. Currents flowing along the trench. J. Fluid Mech. 1987, 176, 95–116. [Google Scholar] [CrossRef]
- Newman, J.N. Propagation of water waves past long two-dimensional obstacles. J. Fluid Mech. 1965, 23, 23–29. [Google Scholar] [CrossRef]
- Newman, J.N. Propagation of water waves over an infinite step. J. Fluid Mech. 1965, 23, 399–415. [Google Scholar] [CrossRef]
- Rey, V.; Belzons, M.; Guazzelli, E. Propagation of surface gravity waves over a rectangular submerged bar. J. Fluid Mech. 1992, 235, 453–479. [Google Scholar] [CrossRef]
- Ouyang, H.-T.; Chen, K.-H.; Tsai, C.-M. Investigation on bragg reflection of surface water waves induced by a train of fixed floating pontoon breakwaters. Int. J. Nav. Arch. Ocean Eng. 2015, 7, 951–963. [Google Scholar] [CrossRef]
- Devillard, P.; Dunlop, F.; Souillard, B. Localization of gravity waves on a channel with a random bottom. J. Fluid Mech. 1988, 186, 521–538. [Google Scholar] [CrossRef]
- O’Hare, T.J.; Davies, A. A new model for surface wave propagation over undulating topography. Coast. Eng. 1992, 18, 251–266. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Lin, Y.-T.; Hsu, T.-W. On the weak viscous effect of the reflection and transmission over an arbitrary topography. Phys. Fluids 2013, 25. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Lin, Y.-T.; Hsu, T.-W. On step approximation of water-wave scattering over steep or undulated slope. Int. J. Offshore Polar Eng. 2014, 24, 98–105. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Tai, W.; Hsu, T.-W.; Hsiao, S.-C. Step approximation of water wave scattering caused by tension-leg structures over uneven bottoms. Ocean Eng. 2018, 166, 208–225. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Chou, W.-R. Comparison between consistent coupled-mode system and eigenfunction matching method for solving water wave scattering. J. Marine Sci. Technol. 2015, 23, 870–881. [Google Scholar] [CrossRef]
- Li, X.S. An overview of SuperLU: Algorithms, implementation, and user interface. ACM Trans. Math. Softw. 2005, 31, 302–325. [Google Scholar] [CrossRef]
- Isaacson, M.; Premasiri, S.; Yang, G. Wave interactions with vertical slotted barrier. J. Water. Port Coast. Ocean Eng. 1998, 124, 118–126. [Google Scholar] [CrossRef]
- Porter, R.; Porter, D. Water wave scattering by a step of arbitrary profile. J. Fluid Mech. 2000, 411, 131–164. [Google Scholar] [CrossRef]
- Miles, J.W. Surface-wave scattering matrix for a shelf. J. Fluid Mech. 1967, 28, 755–767. [Google Scholar] [CrossRef]





















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, C.-T.; Chang, J.-Y.; Tsai, C.-C. Step Approximation for Water Wave Scattering by Multiple Thin Barriers over Undulated Bottoms. J. Mar. Sci. Eng. 2021, 9, 629. https://doi.org/10.3390/jmse9060629
Tran C-T, Chang J-Y, Tsai C-C. Step Approximation for Water Wave Scattering by Multiple Thin Barriers over Undulated Bottoms. Journal of Marine Science and Engineering. 2021; 9(6):629. https://doi.org/10.3390/jmse9060629
Chicago/Turabian StyleTran, Chang-Thi, Jen-Yi Chang, and Chia-Cheng Tsai. 2021. "Step Approximation for Water Wave Scattering by Multiple Thin Barriers over Undulated Bottoms" Journal of Marine Science and Engineering 9, no. 6: 629. https://doi.org/10.3390/jmse9060629
APA StyleTran, C.-T., Chang, J.-Y., & Tsai, C.-C. (2021). Step Approximation for Water Wave Scattering by Multiple Thin Barriers over Undulated Bottoms. Journal of Marine Science and Engineering, 9(6), 629. https://doi.org/10.3390/jmse9060629