1. Introduction
Maritime transport plays a positive role in promoting the sustainable development of the country’s economy [
1], and it is also directly related to environmental pollution [
2]. Accurate maritime traffic simulators (MTS) can provide an effective basis for the port and route planning and management [
3], and can help liner shipping companies arrange vessel schedule efficiently [
4,
5]. Moreover, an accurate ship maneuvering model is of great practical value for ship trajectory prediction and controller design [
6]. With the rapid development of maritime autonomous surface ships (MASSs) [
7], autonomous navigation and collision avoidance systems require a more intelligent digital maneuvering model, which can predict the future dynamics of ships and estimate the uncertainty caused by the actions to be performed.
Modeling techniques for ship dynamic models involve parametric modeling and nonparametric modeling. Parametric modeling must define a complete mathematical structure in advance from a physical viewpoint and subsequently estimate the hydrodynamic derivatives through parameter identification techniques. Classic system identification methods are widely used for hydrodynamic parameter identification, such as least square estimation [
8], the recursive prediction error (RPE) method [
9]. However, the traditional methods are sensitive to noise, and the multicollinearity will significantly affect the identification accuracy [
10]. Over the decades, a great number of new methods have been proposed to solve the above problems. Yoon and Rhee used ridge regression to suppress the parameter drift due to multicollinearity [
11]. Revestido Herrero and Velasco Gonzalez proposed a two-step method based on extended Kalman filtering (EKF) to identify the parameters in the nonlinear model [
12]. Sutulo and Guedes Soares adopted genetic algorithms (GA) with Hausdorff metric loss function to reduce the influence of white noise on parameter identification [
13]. Least squares support vector machine (LS-SVM), with its good robustness and generalization ability, has been applied to various ship parametric model identification, and has been verified by simulation and experiment [
14,
15]. Recently, Xu et al. proposed an optimal truncated LS-SVM and validated this method by free-running tests [
16,
17] and planar motion mechanism tests [
18]. The main advantage is that it can be successfully used for big data driven modeling or large-scale training set problems. However, parametric models have some inherent limitations. In the specified parametric framework, the unmodeled dynamics caused by external perturbations and noise [
19] will greatly impact the parameter estimation. Moreover, the shapes of various unmanned surface vessels (USVs) are irregular, and the traditional parametric models obtained from classic ship types are not completely matched.
Unlike the parametric model, the nonparametric model does not require any predetermined equation framework constructed by prior knowledge [
20]. Nonparametric modeling provides a wealth of techniques to extract information from measurement data, which can be translated into knowledge about hydrodynamic systems [
21]. The typical representation of nonparametric modeling methods is neural networks. A recursive neural network (RNN) is first used to fit a maneuvering simulation model for surface ships [
22]. Zhang and Zou presented the feed-forward neural network with Chebyshev orthogonal basis function for the black-box modeling of ship maneuvering motion [
23]. Wang et al. proposed generalized ellipsoidal basis function fuzzy neural networks to identify the motion dynamics of a large tanker [
24]. However, NNs require a considerable amount of training data, and the structure of NNs is difficult to determine. Long short-term memory (LSTM) NNs overcome these shortcomings with the transmission of long-term information and have been successfully used to identify USVs [
25] and container ships [
26]. The kernel-based method requires less training data and has a lower overfitting risk than the NN [
27]. Locally weighted learning (LWL) with modified genetic optimization is presented to identify ship maneuvering systems with full-scale trials [
28].
-SVM is proposed to establish the maneuvering motion model and validated by KVLCC2 ship experimental data [
29]. In general, nonparametric modeling alleviates the drawbacks of parametric modeling, i.e., multicollinearity, parameter drifting and unmodeled dynamics.
Recently, the Gaussian process (GP) has drawn attention in nonparametric modeling in marine engineering. GP further strengthens the generalization ability of the kernel method with a priori introduction from a Bayesian perspective. GP is used to identify nonlinear wave forces [
30], floating production storage and offloading (FPSO) vessel motion modeling [
31], and ship trajectory prediction [
32]. Ramire et al. first proposed using a multioutput GP to identify the dynamic model of a container ship [
33]. Xue et al. presented a noisy input GP to improve the identification accuracy and verified it by using simulated ship motion data with artificial noise [
34]. The experimental data of the KVLCC2 ship were used to construct the GP [
35], but the accuracy of prediction in the experiment was not sufficiently high. In the prediction of ship motion based on GP, the prediction output of each time is used as the input to the next iteration, so uncertainty will accumulate. However, this ship dynamic modeling using GP does not consider the propagation of variance.
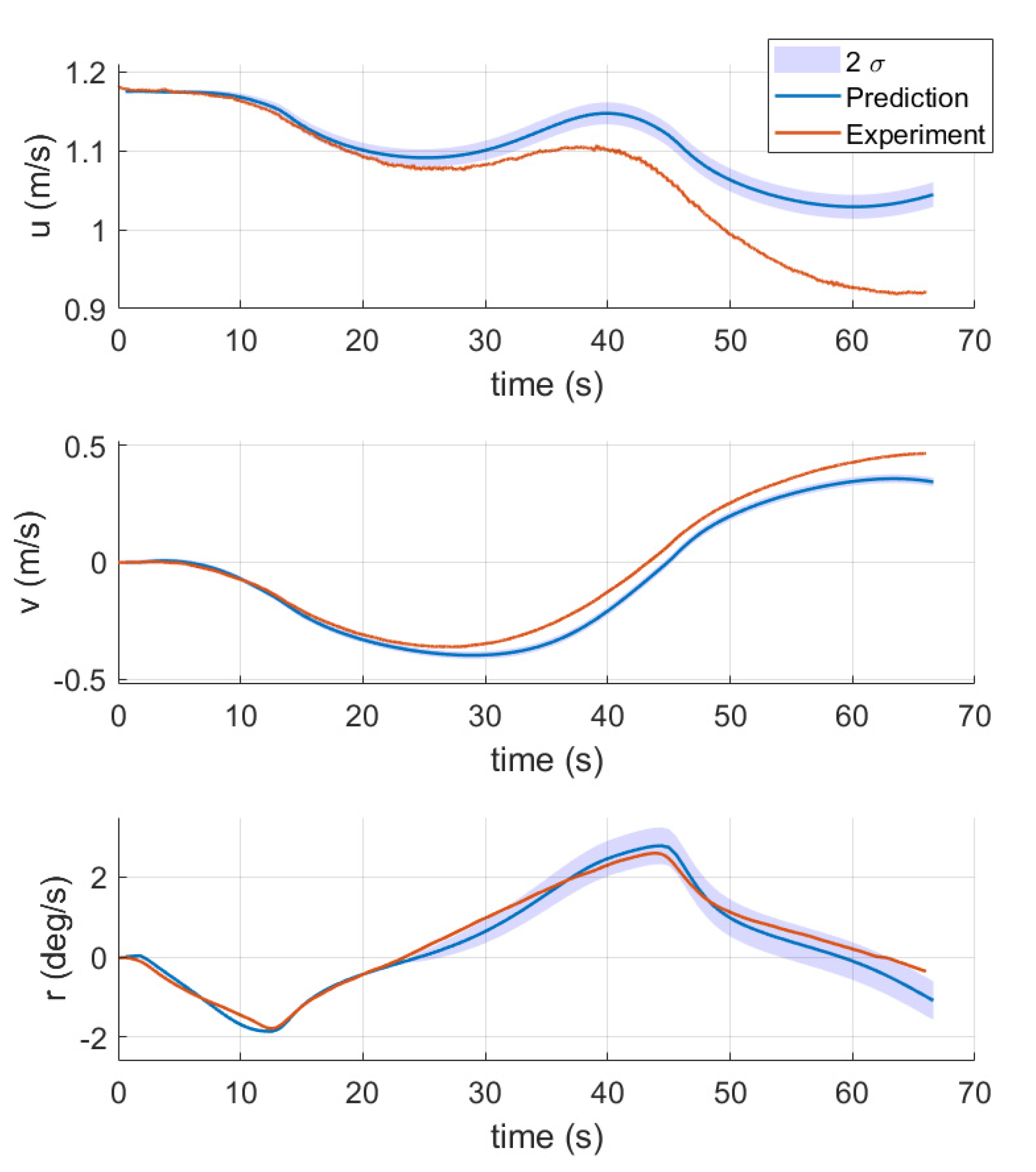
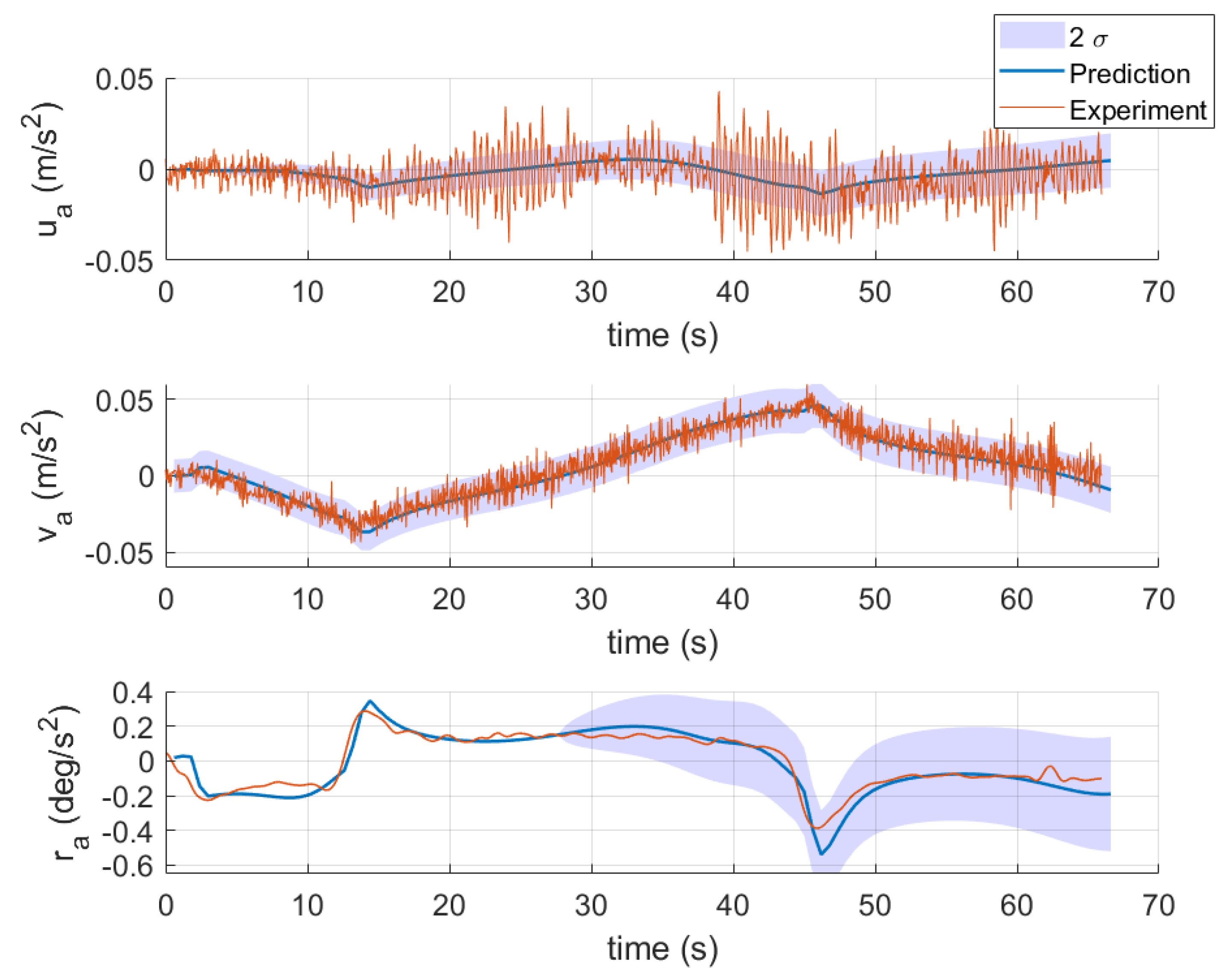
In this paper, to solve the problem of variance propagation in GP, an approximation method is applied. First, the input is assumed to follow a Gaussian distribution. The predictive distribution is approximated by a moment matching-based technique. To evaluate the effectiveness of the proposed scheme, the simulation case of a container ship and the experimental case of a KVLCC2 ship model from the Hamburg Ship Model Basin (HVSA) are taken as the study object. The identified models are assessed by the prediction error with other motion data not included in the training set.
The remainder of the paper is organized as follows.
Section 2 describes the nonparametric ship dynamic model. The algorithms of GP with uncertain input are depicted in
Section 3. In
Section 4, the identification scheme of the ship and experimental example are presented to demonstrate the applicability of the proposed method.
Section 5 summarizes the study with conclusions.
2. Ship Nonparametric Dynamic Model
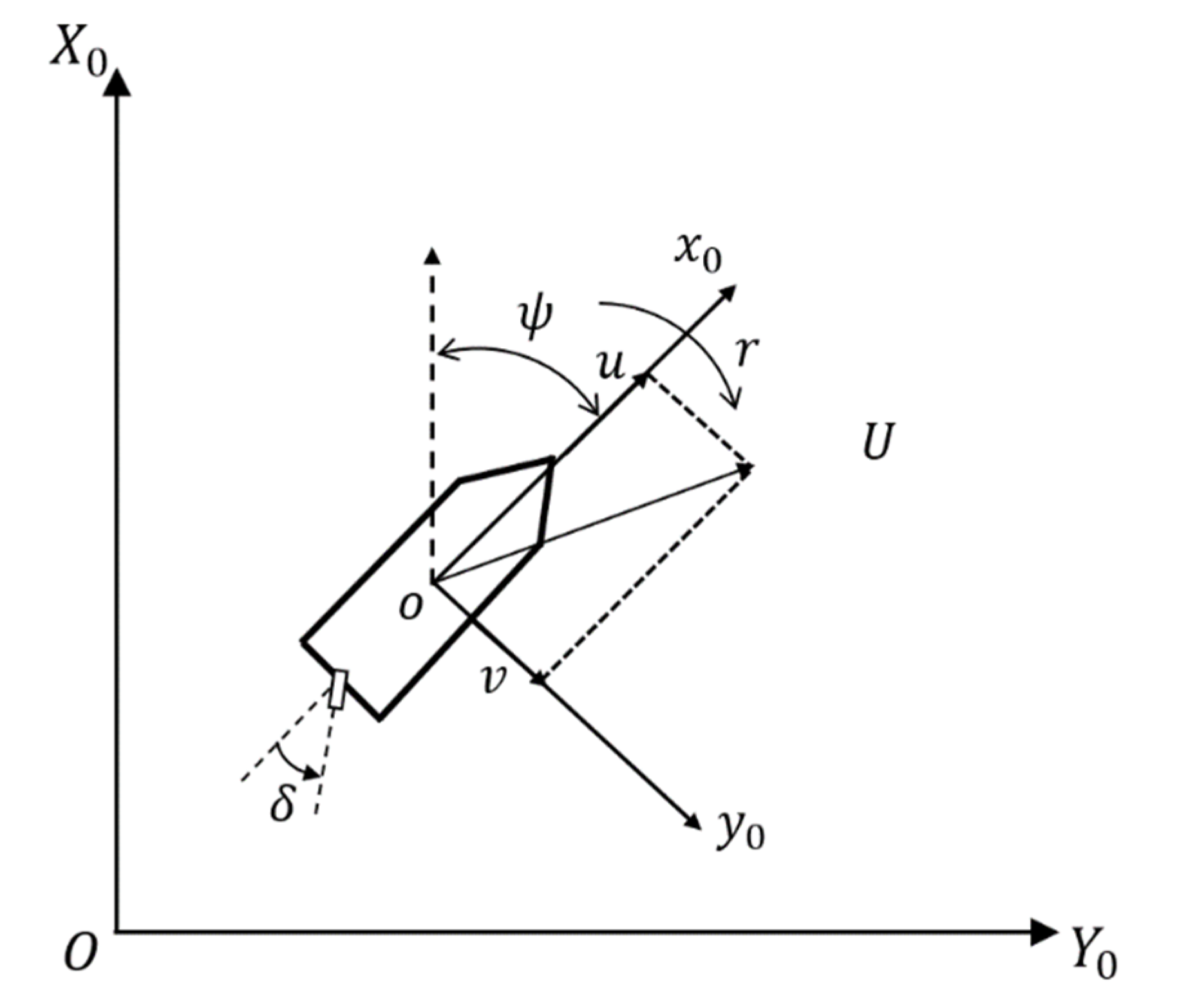
For a surface ship, the dynamic model is usually described by a 3-DOF model, including the motion of surge, sway and yaw.
Figure 1 shows the coordinate system of a surface ship maneuvering motion, including the Earth-fixed coordinates
and body-fixed coordinates
. Here,
are the state variables of surge velocity, sway velocity, and yaw rate, respectively, while
is the rudder angle and
is the heading angle.
The ship maneuvering system is a nonlinear autoregressive model with an exogenous input (NARX) system [
36], and the outputs at the next moment are based on the previous state variables.
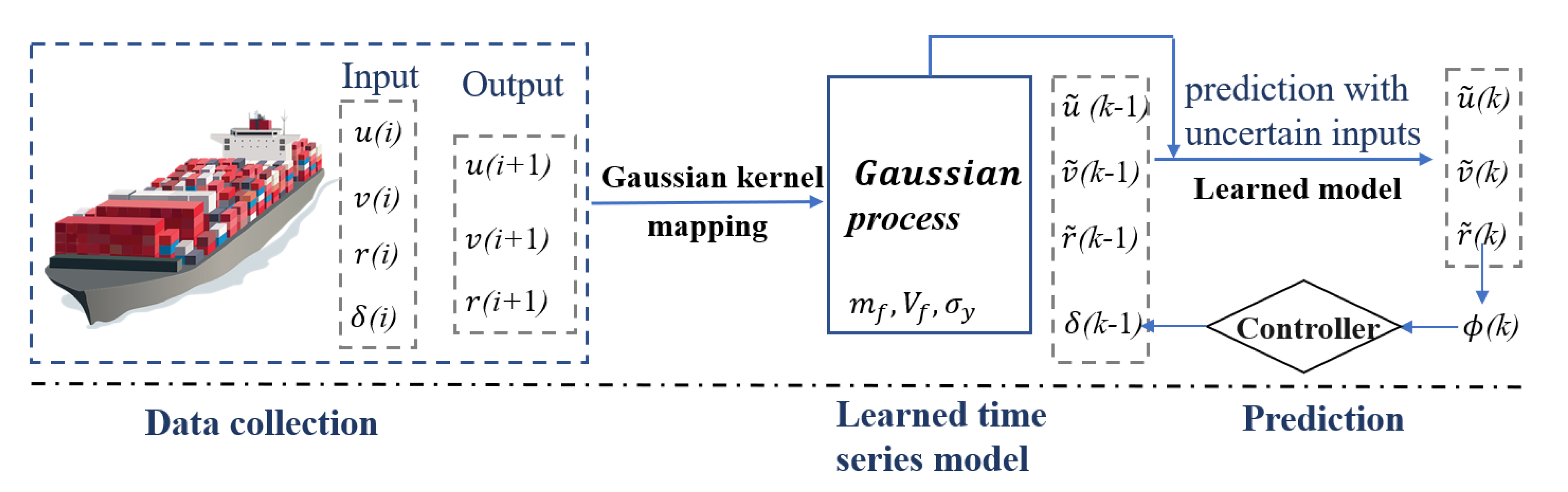
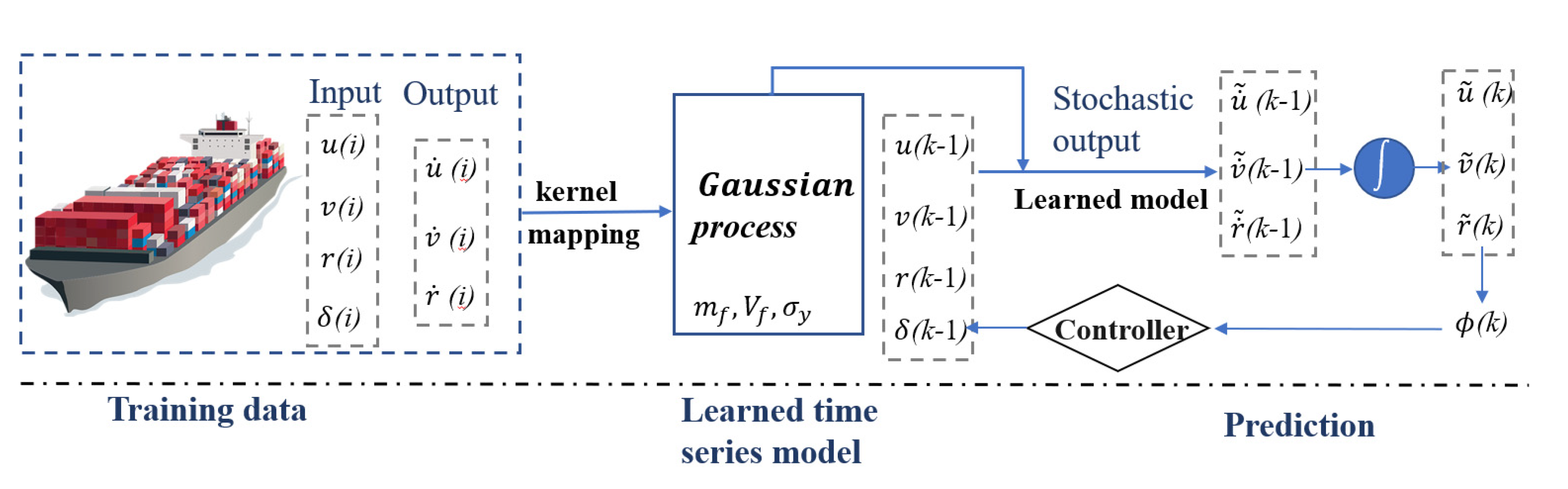
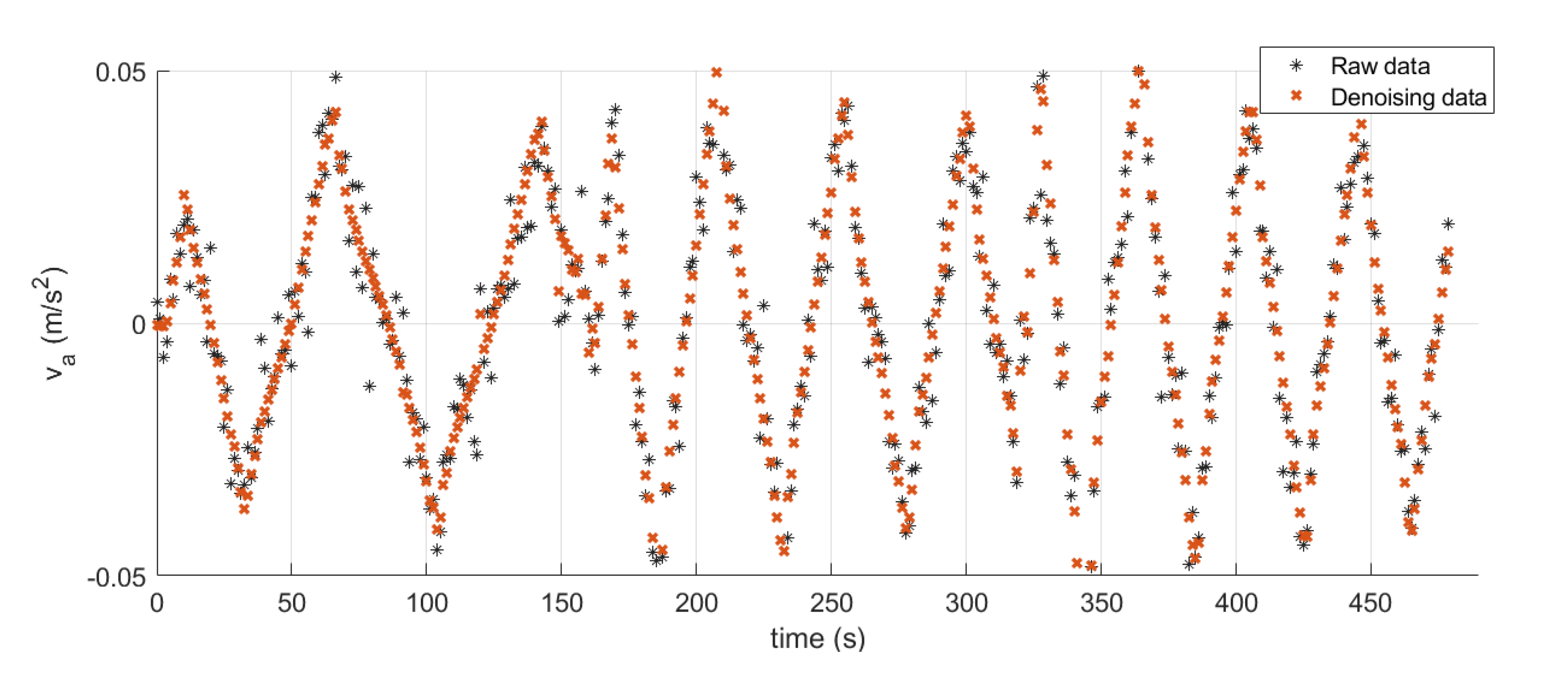
Figure 2 illustrates the modeling and prediction process of the ship dynamic model. In the first stage, ship motion data are collected by onboard sensors such as IMU and GPS. After data preprocessing, the machine learning technique is used to fit the surrogate time series model. Finally, other motions can be predicted through the learned model. The symbol “~” represents random variables.
According to the relevant studies of nonparametric ship dynamic modeling [
25,
34], the formulation of the ship discrete nonparametric model is as follows:
The selected regressors of the GP are inspired by parametric models, including the Abkowitz [
37] and Maneuvering Modeling Group (MMG) models [
38]. The ship position variables can be obtained as follows:
5. Discussion and Conclusions
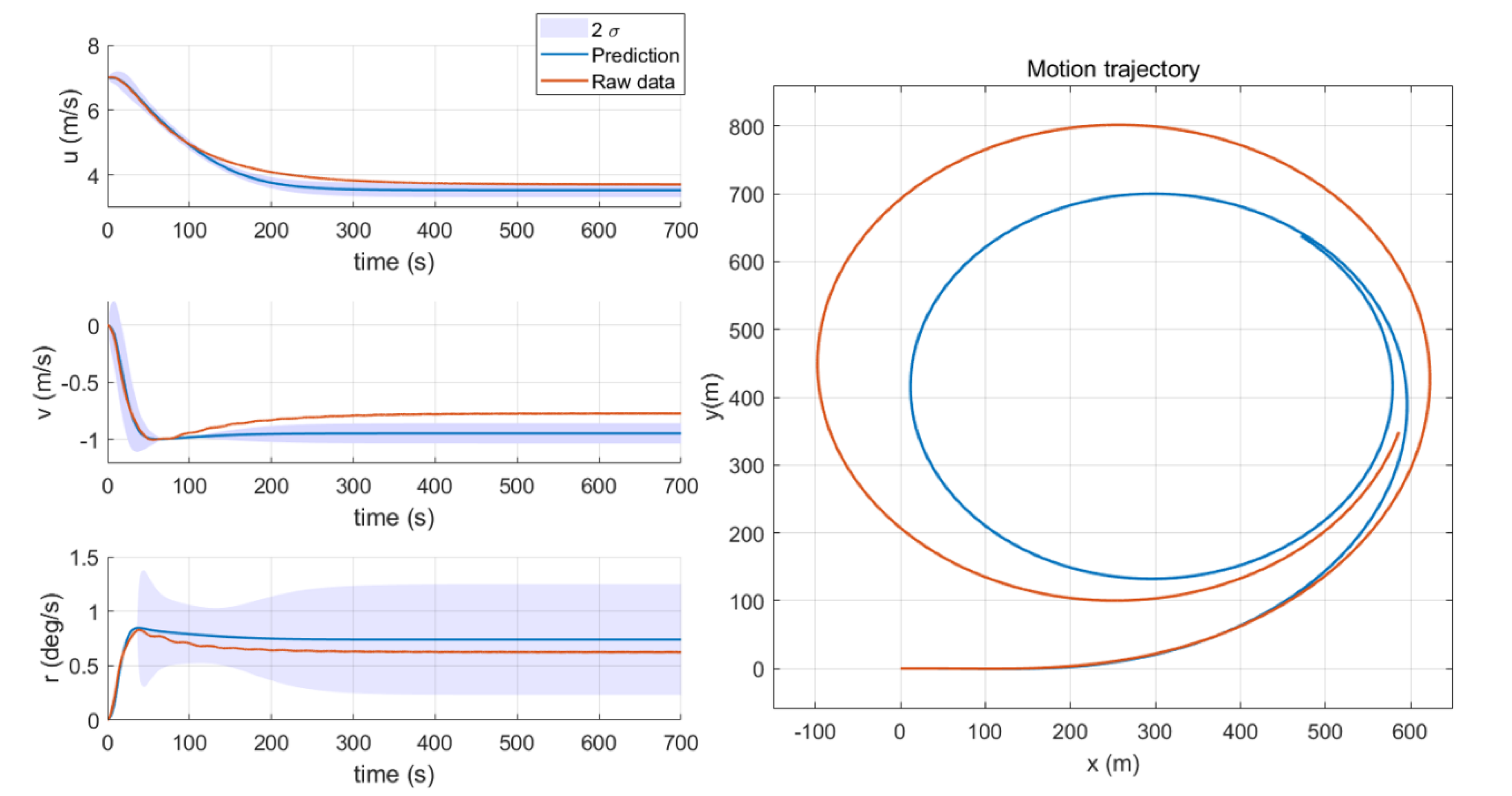
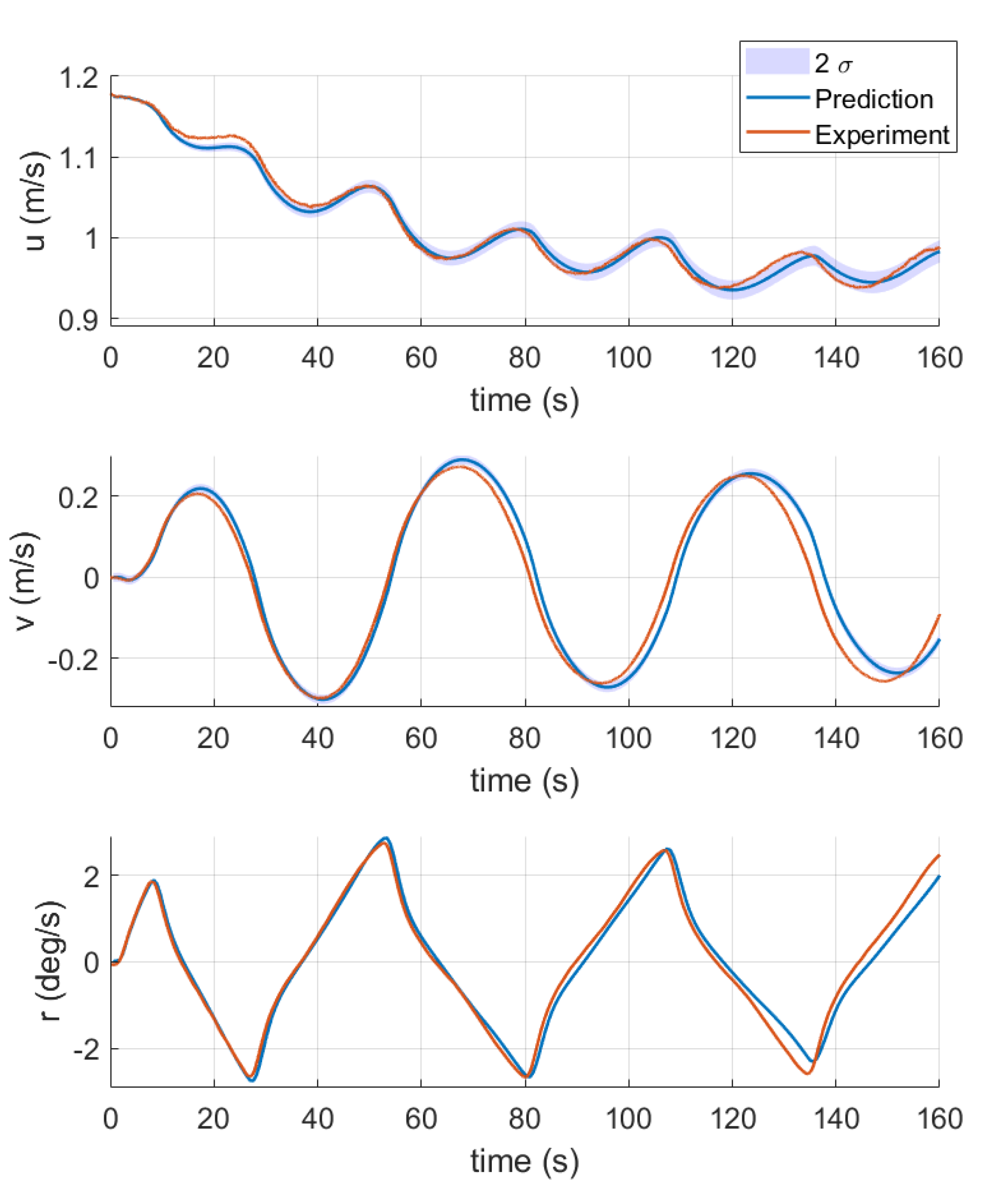
In this work, a novel identification modeling and prediction scheme based on GP is proposed to identify the ship nonparametric maneuvering model. By introducing the moment matching approximation method, the multi-step prediction uncertainty of ship motion can be propagated. The performance of the proposed method has been tested with a large container ship and a scale ship model and shows good accuracy and generalization ability. Moreover, the uncertainty of propagation can help drivers or controllers make safe decisions. Through the simulation of the container ship, it is proven that the prediction uncertainty obtained by the proposed method is reliable enough. Where there is less dynamic information in the training data, the prediction uncertainty of turning circle motion is larger than that of zigzag maneuver. In addition, it has been demonstrated that the performance of the presented approach is superior to the nu-SVM method in the experimental case. There are also some limitations of this study: (1) The proposed method needs to spend more calculation time due to consider the uncertainty propagation compared with other methods. The sparse method can be used to improve computational efficiency. (2) Both the two verified cases in this paper are container ships. The applicability of the model to other ship types, especially new unmanned ships, needs further study.
Future work includes two main tasks: (1) Although the presented method has been verified by simulation and experimental data, full-scale trials with disturbances should be performed, including waves, currents, and wind. In this environment, the uncertainty prediction provided by this method will have great application value. (2) This method can be used in modern controllers such as model predictive control. The uncertainty of predictions can be introduced in the cost function to construct a cautious controller.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}