
Computational Analysis of Active and Passive Flow Control for Backward Facing Step



Abstract
:1. Introduction
2. Methods
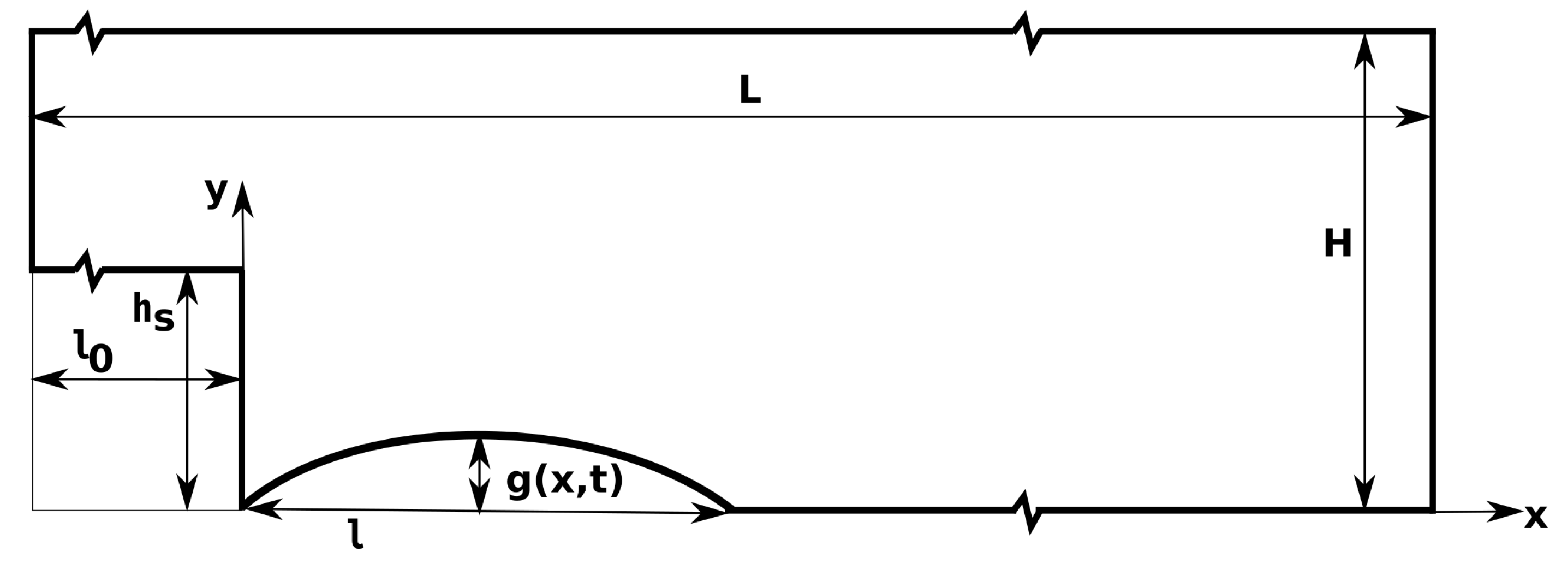
2.1. Geometry and Boundary Conditions of Backward Facing Step with Partly Moving Bottom Wall
- (a)
- Forced motion with frequency the same as the frequency of flow, according to the equation [12]
- (b)
- Fluid–structure interaction between the flow and the moving part of the bottom wall which is considered an elastic membrane. The structure responds to the flow according to the equation of a membrane, under the assumptions of small displacement and small inertia
2.2. Computational Method for the Navier–Stokes Equations
2.3. Computational Grids and Discretization Steps
2.4. Fluid–Structure Interaction
| Algorithm 1 BVP solution | ||
| • Initialization parameters: time instance , tolerance , iteration number , initial membrane inclination at step position | ||
| 1: | define | ▷ Error function, depicting divergence from 2nd BV |
| 2: | ▷ Next integration index | |
| 3: | solve initial value problem of Equation (4), and | |
| 4: | if | ▷ If error greater than tolerance |
| 5: | compute | ▷ Derivative of error with respect to inclination at |
| 6: | compute from Newton–Raphson method | ▷ Zero error desired at next step |
| 7: | repeat from 2 | |
| 8: | else | ▷ BVP problem is satisfied |
| 9: | return | ▷ Return BVP solution |
3. Results and Discussion
3.1. Steady Flow
3.2. Control of Steady Flow Using an Elastic Membrane
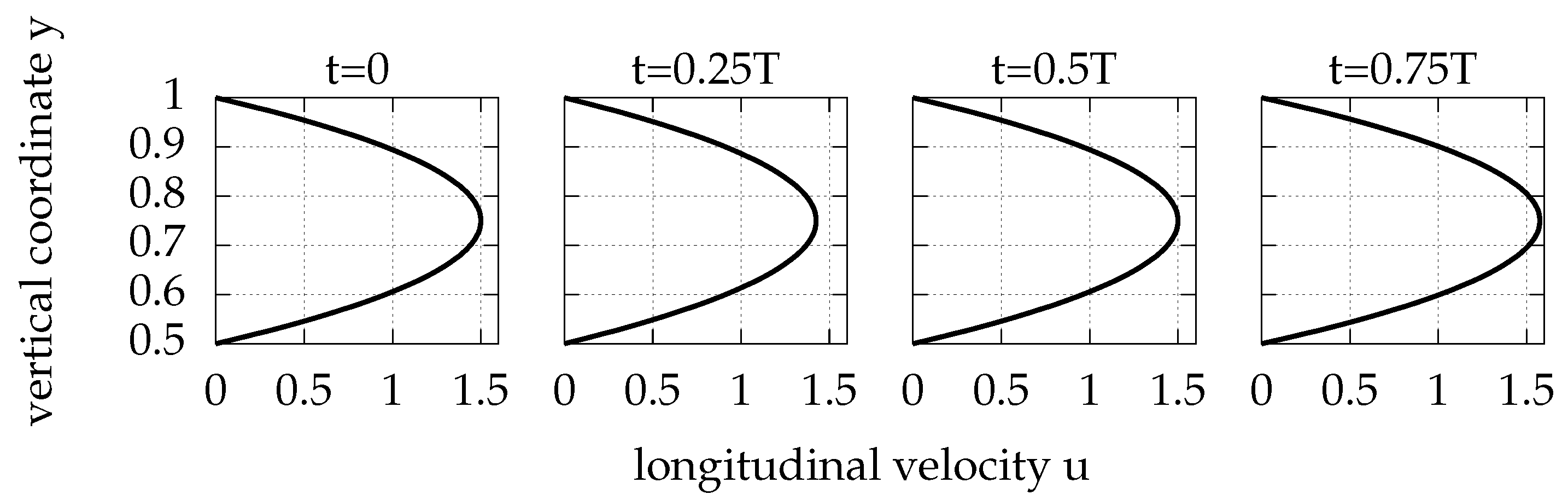
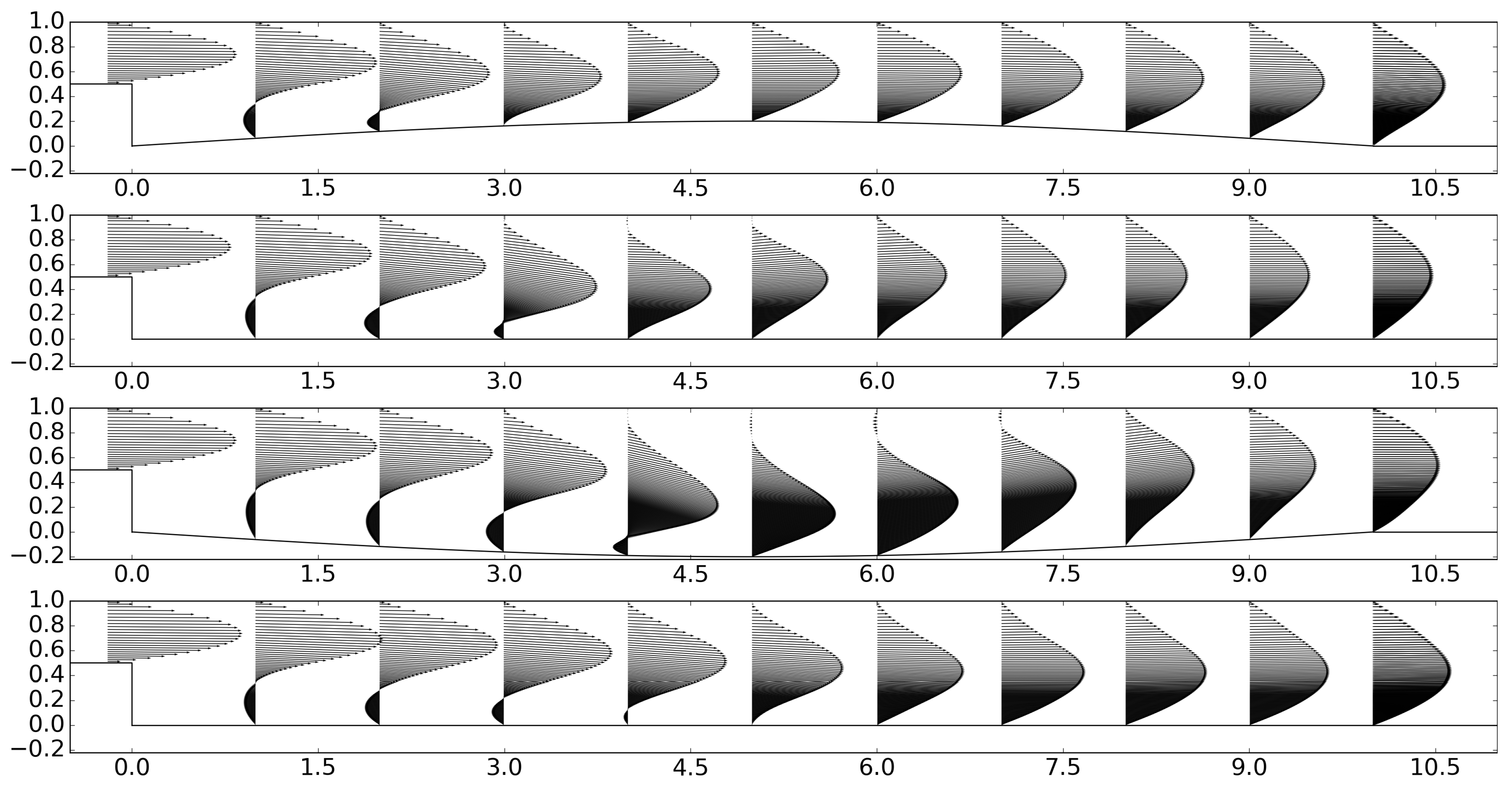
3.3. Unsteady Periodic Flow
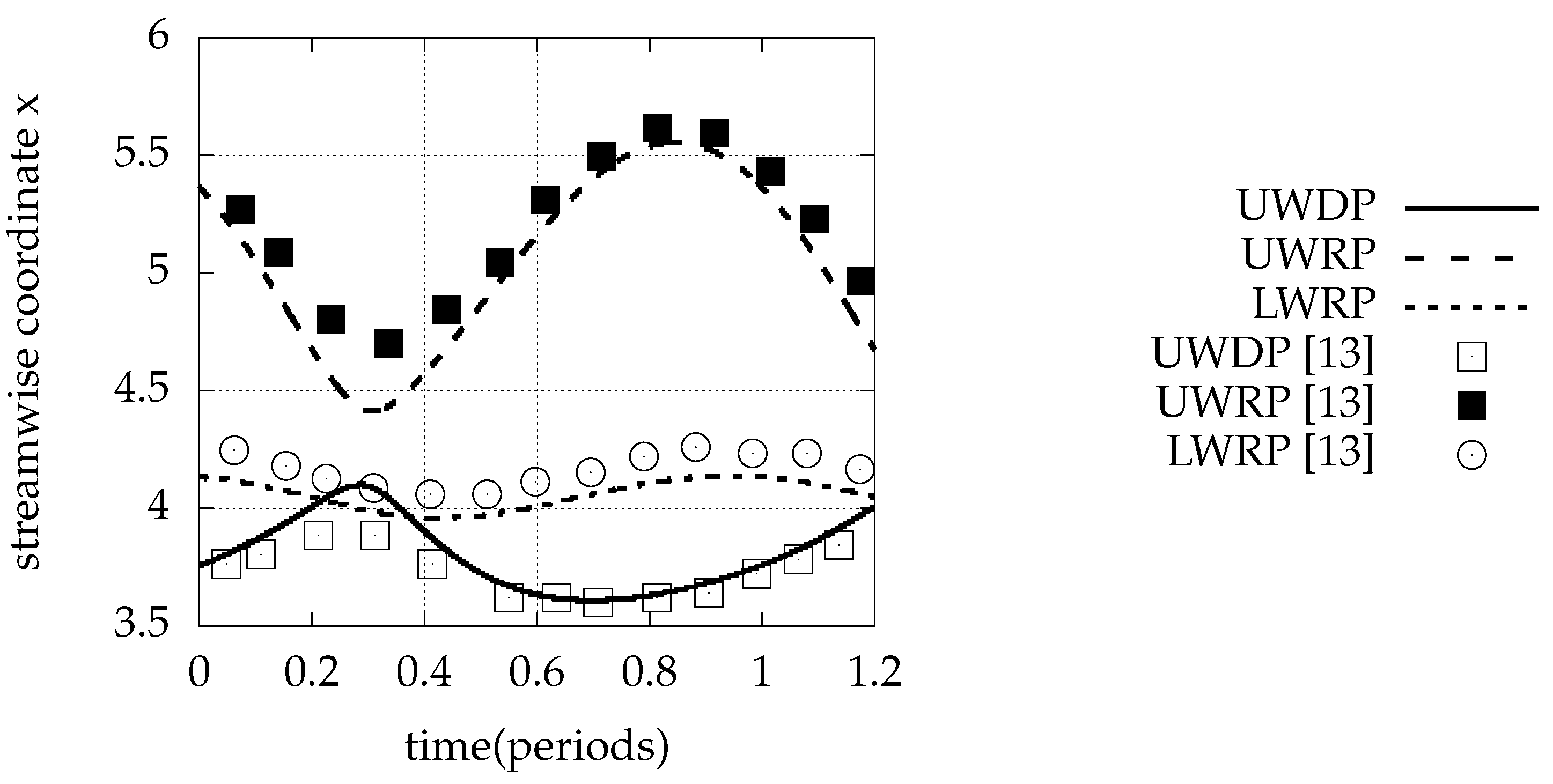
3.4. Active Control of Unsteady Periodic Flow
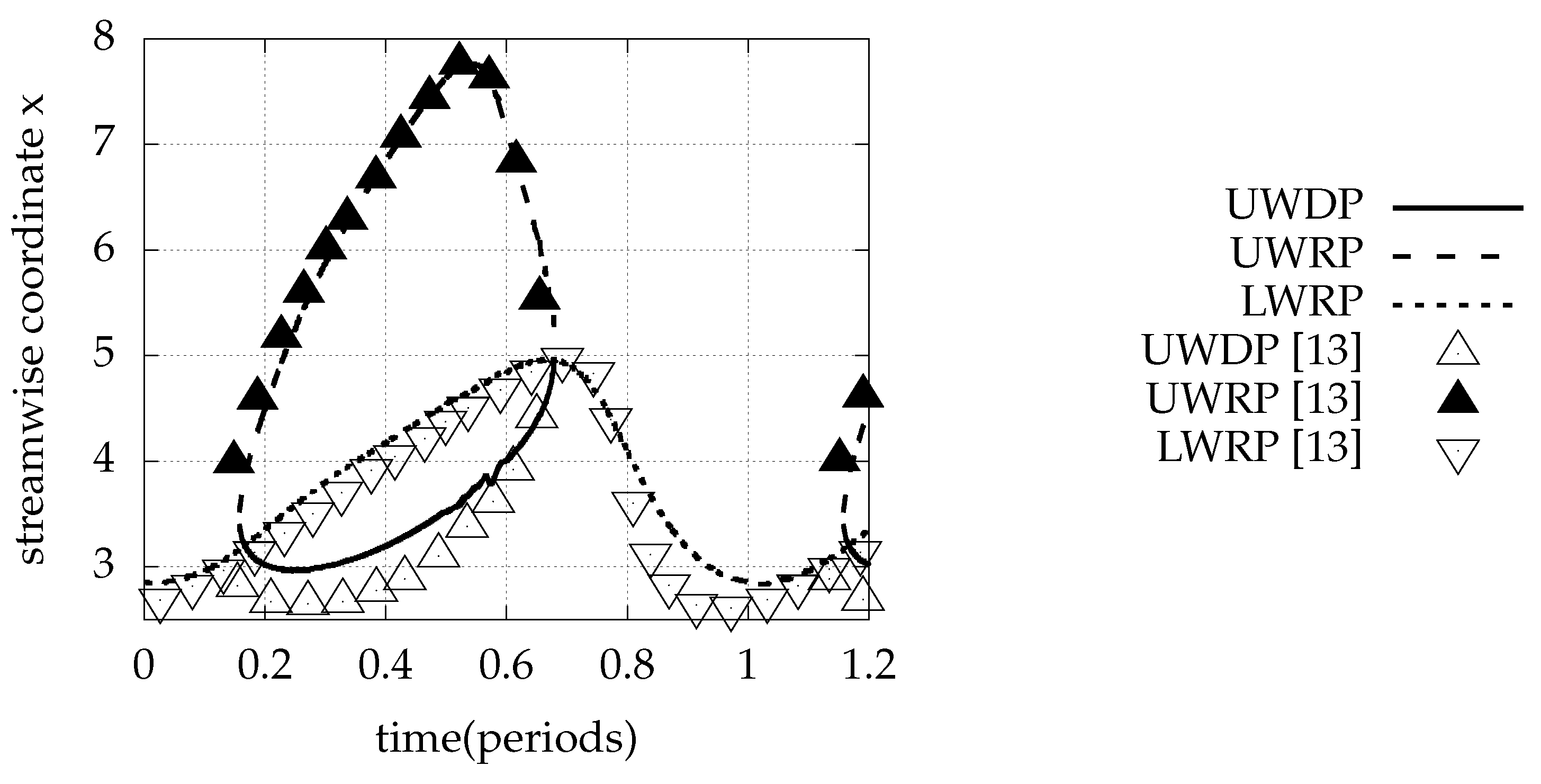
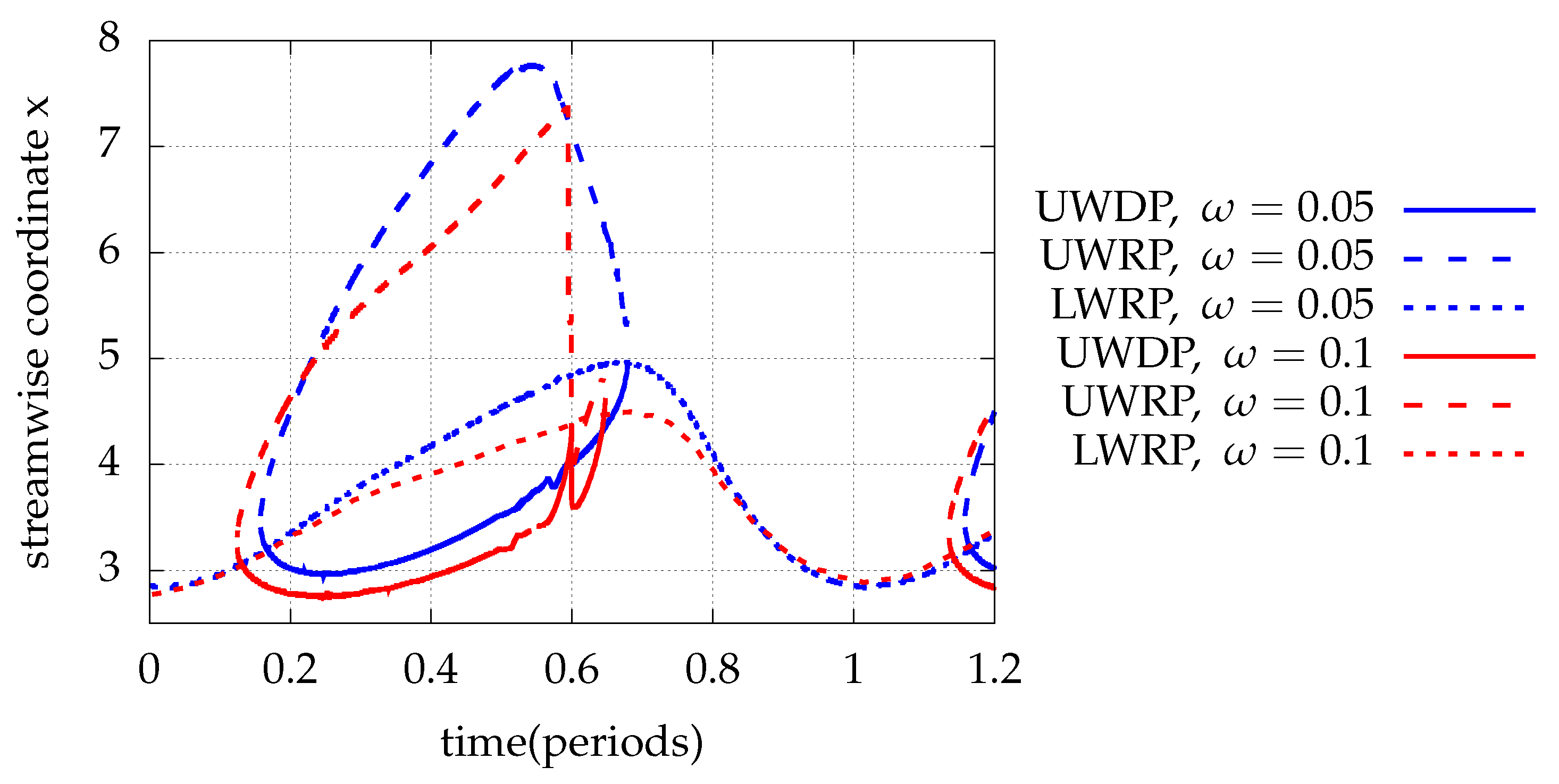
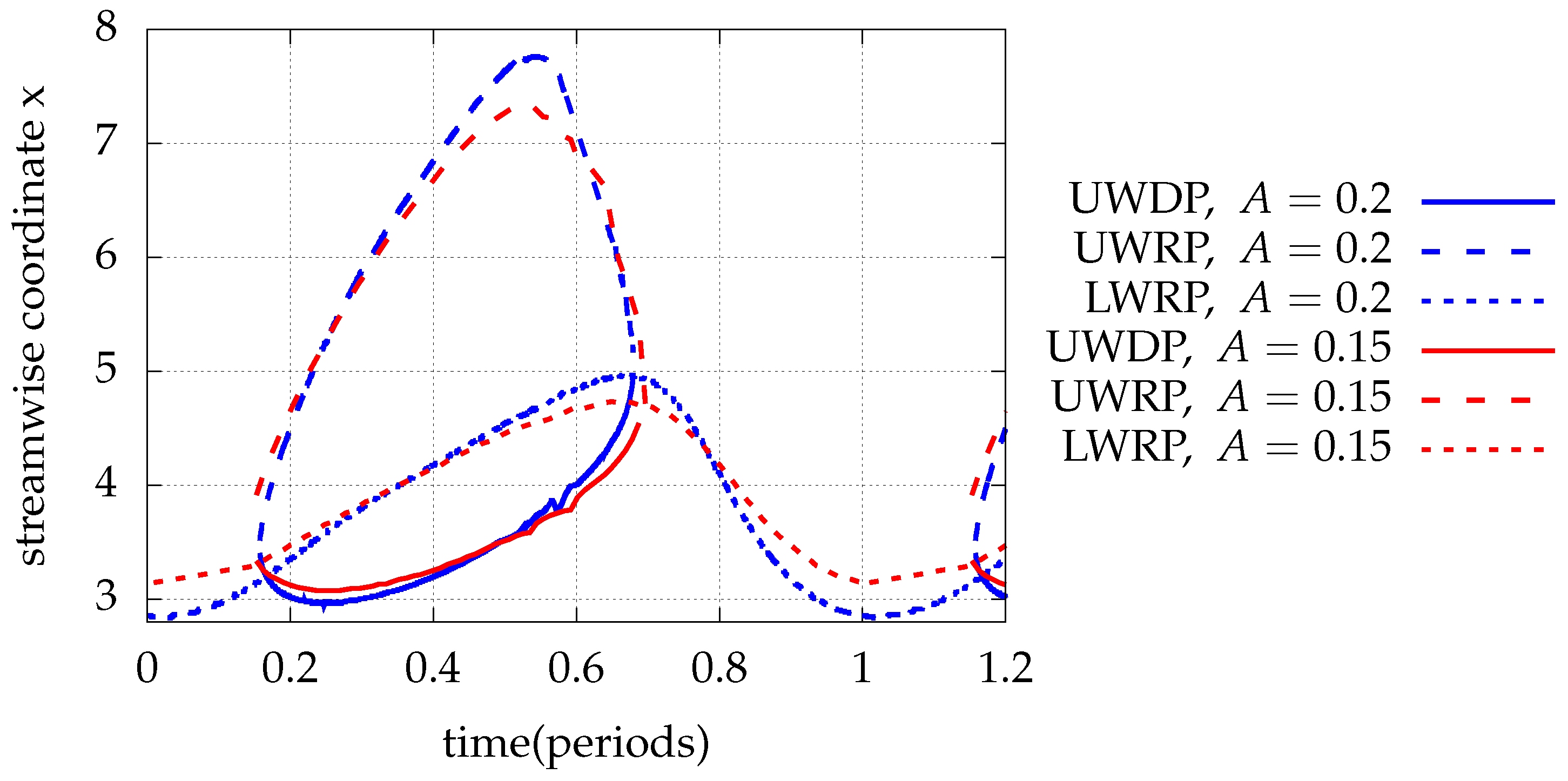
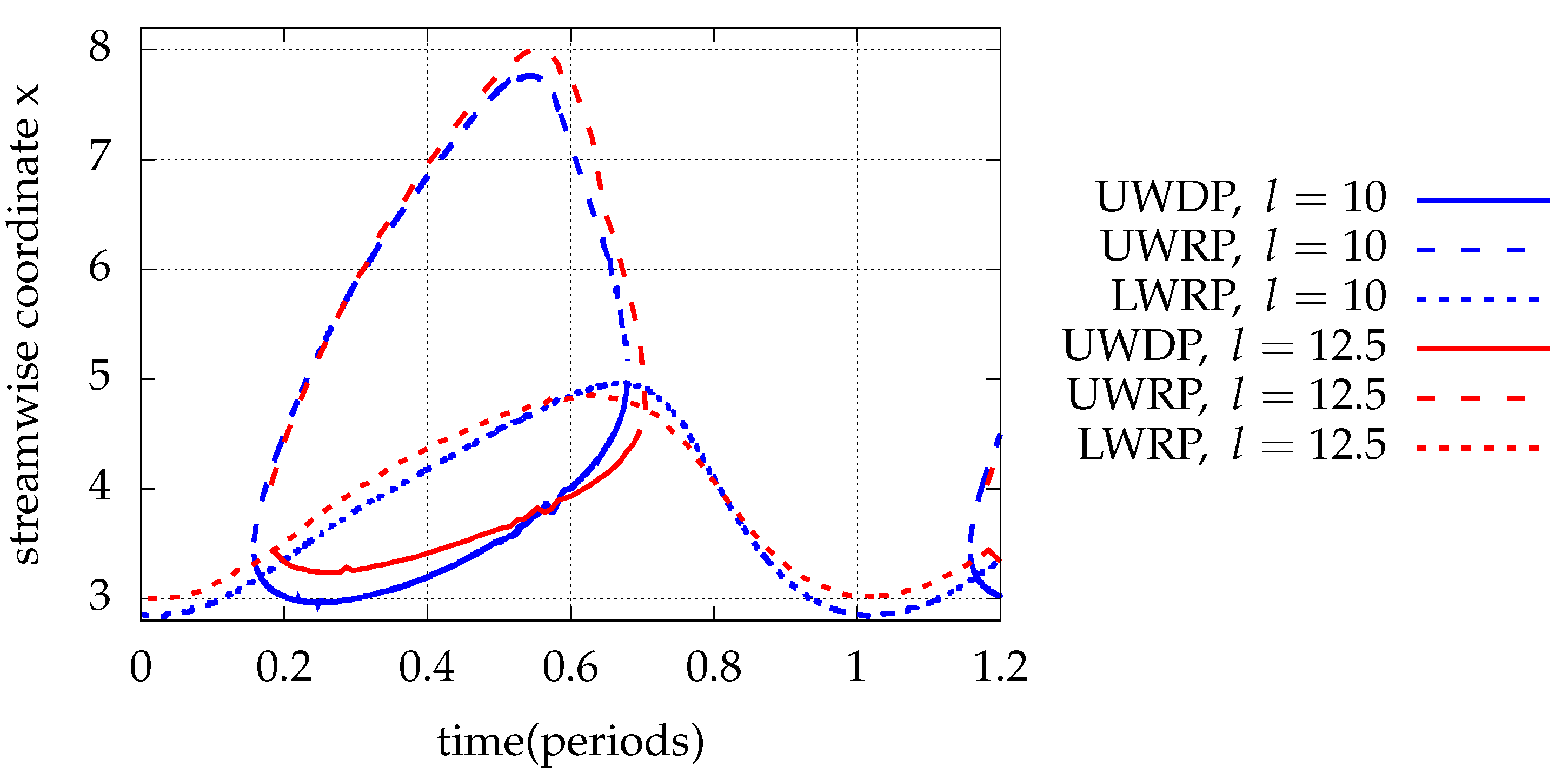
3.5. Passive Control of Unsteady Periodic Flow via Elastic Membrane
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Emami-Naeini, A.; McCabe, S.; de Roover, D.; Ebert, J.; Kosut, R. Active Control of Flow Over a Backward-Facing Step. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 12–15 December 2005; pp. 7366–7371. [Google Scholar]
- Sakuraba, K.; Fukazawa, K.; Sano, M. Control of Turbulent Channel Flow over a Backward-Facing Step by Suction or Injection. Heat Transfer 2004, 33, 490–504. [Google Scholar]
- Chen, L.; Asai, K.; Nonomura, T.; Xi, G.; Liu, T. A review of Backward-Facing Step (BFS) flow mechanisms, heat transfer and control. Therm. Sci. Eng. Prog. 2018, 6, 194–216. [Google Scholar] [CrossRef]
- Wang, B.; Li, H. POD analysis of flow over a backward-facing step forced by right-angle-shaped plasma actuator. SpringerPlus 2016, 5, 795. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- You, D.; Moin, P. Active control of flow separation over an airfoil using synthetic jets. J. Fluids Struct. 2008, 24, 1349–1357. [Google Scholar] [CrossRef]
- Ma, X.; Schröder, A. Analysis of flapping motion of reattaching shear layer behind a two-dimensional backward-facing step. Phys. Fluids 2017, 29, 115104. [Google Scholar] [CrossRef]
- Tihon, J.; Penkavova, V.; Pantzali, M. The effect of inlet pulsations on the backward-facing step flow. Eur. J. Mech. B/Fluids 2010, 29, 224–235. [Google Scholar] [CrossRef]
- Kapiris, P.; Mathioulakis, D. Experimental study of vortical structures in a periodically perturbed flow over a backward-facing step. Int. J. Heat Fluid Flow 2014, 47, 101–112. [Google Scholar] [CrossRef]
- Morioka, T.; Honami, S. Dynamic Characteristics in a Control System of Backward Facing Step Flow by Vortex Generator Jets. In Proceedings of the 2nd AIAA Flow Control Conference, Portland, Oregon, 28 June–1 July 2004. [Google Scholar]
- Chun, K.; Sung, H. Control of turbulent separated flow over a backward-facing step by local forcing. Exp. Fluids 1996, 21, 417–426. [Google Scholar] [CrossRef]
- Gautier, N.; Aider, J.L. Control of the separated flow downstream of a backward-facing step using visual feedback. Proc. R. Soc. A Math. Phys. Eng. Sci. 2013, 469, 20130404. [Google Scholar] [CrossRef]
- Mateescu, D.; Venditti, D.A. Unsteady confined viscous flows with oscillating walls and multiple separation regions over a downstream-facing step. J. Fluids Struct. 2001, 15, 1187–1205. [Google Scholar] [CrossRef]
- Mateescu, D.; Muñoz, M.; Scholz, O. Analysis of unsteady confined viscous flows with variable inflow velocity and oscillating walls. J. Fluids Eng. 2010, 132, 041105. [Google Scholar] [CrossRef] [Green Version]
- Graff, K. Wave Motion in Elastic Solids; Dover Publications: New York, NY, USA, 1975. [Google Scholar]
- Tsangaris, S.; Pappou, T. Flow investigation in deformable arteries. In Intra and Extracorporeal Cardiovascular Fluid Dynamics; Verdonck, P., Perktold, K., Eds.; WIT Press: Boston, MA, USA, 2000; Volume 33, pp. 291–332. [Google Scholar]
- Luo, X.Y.; Pedley, T.J. A Numerical Simulation of Steady Flow in a 2-D Collapsible Channel. J. Fluids Struct. 1995, 9, 149–174. [Google Scholar] [CrossRef]
- Gregory, A.L.; Agarwal, A.; Lasenby, J. An experimental investigation to model wheezing in lungs. R. Soc. Open Sci. 2021, 8, 201951. [Google Scholar] [CrossRef] [PubMed]
- Matthews, L.A.; Greaves, D.M.; Williams, C.J.K. Numerical simulation of viscous flow interaction with an elastic membrane. Int. J. Numer. Methods Fluids 2008, 57, 1577–1602. [Google Scholar] [CrossRef]
- Luo, X.Y.; Pedley, T.J. A numerical simulation of unsteady flow in a two-dimensional collapsible channel. J. Fluid Mech. 1996, 314, 191–225. [Google Scholar] [CrossRef]
- Huang, L. Viscous flutter of a finite elastic membrane in poiseuille flow. J. Fluids Struct. 2001, 15, 1061–1088. [Google Scholar] [CrossRef]
- Peskin, C.S. Flow patterns around heart valves: A numerical method. J. Comput. Phys. 1972, 10, 252–271. [Google Scholar] [CrossRef]
- Saleel, A.C.; Shaija, A.; Jayaraj, S. On Simulation of Backward Facing Step Flow Using Immersed Boundary Method. Am. J. Fluid Dyn. 2013, 3, 9–19. [Google Scholar]
- Yang, D.; He, S.; Shen, L.; Luo, X. Large eddy simulation coupled with immersed boundary method for turbulent flows over a backward facing step. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2021, 235, 2705–2714. [Google Scholar] [CrossRef]
- Ge, L.; Sotiropoulos, F. A numerical method for solving the 3D unsteady incompressible Navier—Stokes equations in curvilinear domains with complex immersed boundaries. J. Comput. Phys. 2007, 225, 1782–1809. [Google Scholar] [CrossRef] [Green Version]
- Borazjani, I.; Ge, L.; Sotiropoulos, F. Curvilinear immersed boundary method for simulating fluid structure interaction with complex 3D rigid bodies. J. Comput. Phys. 2008, 227, 7587–7620. [Google Scholar] [CrossRef] [Green Version]
- Gilmanov, A.; Le, T.B.; Sotiropoulos, F. A numerical approach for simulating fluid structure interaction of flexible thin shells undergoing arbitrarily large deformations in complex domains. J. Comput. Phys. 2015, 300, 814–843. [Google Scholar] [CrossRef] [Green Version]
- Mittal, R.; Iaccarino, G. Immersed boundary methods. Annu. Rev. Fluid Mech. 2005, 37, 239–261. [Google Scholar] [CrossRef] [Green Version]
- Armaly, B.F.; Durst, F.; Pereira, J.C.F.; Schönung, B. Experimental and theoretical investigation of backward-facing step flow. J. Fluid Mech. 1983, 127, 473–496. [Google Scholar] [CrossRef]
- Kim, J.; Moin, P. Application of a fractional-step method to incompressible Navier-Stokes equations. J. Comput. Phys. 1985, 59, 308–323. [Google Scholar] [CrossRef]
- Gartling, D.K. A test problem for outflow boundary conditions—Flow over a backward-facing step. Int. J. Numer. Methods Fluids 1990, 11, 953–967. [Google Scholar] [CrossRef]
- Sohn, J.L. Evaluation of FIDAP on some classical laminar and turbulent benchmarks. Int. J. Numer. Methods Fluids 1988, 8, 1469–1490. [Google Scholar] [CrossRef]
- Pappou, T.; Tsangaris, S. Development of an artificial compressibility methodology using flux vector splitting. Int. J. Numer. Methods Fluid Mech. 1997, 25, 523–545. [Google Scholar] [CrossRef]
- Fernández-Feria, R.; Sanmiguel-Rojas, E. An explicit projection method for solving incompressible flows driven by a pressure difference. Comput. Fluids 2004, 33, 463–483. [Google Scholar] [CrossRef]
- Angelidis, D.; Chawdhary, S.; Sotiropoulos, F. Unstructured Cartesian refinement with sharp interface immersed boundary method for 3D unsteady incompressible flows. J. Comput. Phys. 2016, 325, 272–300. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.Q.; Habchi, S.D.; Przekwas, A.J. General strong conservation formulation of Navier-Stokes equations in nonorthogonal curvilinear coordinates. AIAA J. 1994, 32, 936–941. [Google Scholar] [CrossRef]
- Gilmanov, A.; Sotiropoulos, F. A hybrid Cartesian/immersed boundary method for simulating flows with 3D, geometrically complex, moving bodies. J. Comput. Phys. 2005, 207, 457–492. [Google Scholar] [CrossRef]
- George, P.; Borouchaki, H. Delaunay Triangulation and Meshing: Application to Finite Elements; Hermès: Paris, France, 1998. [Google Scholar]
- Kang, S.K. Numerical Modeling of Turbulent Flows in Arbitrarily Complex Natural Streams. Ph.D. Thesis, University of Minnesota, Minneapolis, MN, USA, 2010. [Google Scholar]
- Calderer, A.; Kang, S.; Sotiropoulos, F. Level set immersed boundary method for coupled simulation of air/water interaction with complex floating structures. J. Comput. Phys. 2014, 277, 201–227. [Google Scholar] [CrossRef] [Green Version]
- Patankar, S.V.; Spalding, D.B. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. Int. J. Heat Mass Transf. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]
- Kang, S.; Lightbody, A.; Hill, C.; Sotiropoulos, F. High-resolution numerical simulation of turbulence in natural waterways. Adv. Water Resour. 2011, 34, 98–113. [Google Scholar] [CrossRef]
- Saad, Y.; Schultz, M.H. GMRES: A Generalized Minimal Residual Algorithm for Solving Nonsymmetric Linear Systems. SIAM J. Sci. Stat. Comput. 1986, 7, 856–869. [Google Scholar] [CrossRef] [Green Version]
- Knoll, D.A.; Keyes, D.E. Jacobian-free Newton–Krylov methods: A survey of approaches and applications. J. Comput. Phys. 2004, 193, 357–397. [Google Scholar] [CrossRef] [Green Version]
- VFS—WIND Virtual Flow Simulator. Available online: https://safl-cfd-lab.github.io/VFS-Wind/ (accessed on 10 January 2021).
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes 3rd Edition: The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Greitzer, E.; Tan, C.; Graf, M. Internal Flow: Concepts and Applications; Cambridge Engine Technology Series; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Spurk, J.H.; Aksel, N. Fluid Mechanics, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Present | [12] | [30] | [31] | Present | [12] | |
|---|---|---|---|---|---|---|
| Grid density | 2019 × 121 | 1201 × 241 | 600 × 30 | 3025 × 182 | 2193 × 401 | |
| Upper wall detachment | 4.82 | 4.85 | 4.85 | - | 4.4 | 4.66 |
| Upper wall reattachment | 10.46 | 10.47 | 10.48 | - | 10.38 | 10.31 |
| Lower wall reattachment | 6.06 | 6.09 | 6.1 | 5.8 | 5.61 | 5.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moulinos, I.; Manopoulos, C.; Tsangaris, S. Computational Analysis of Active and Passive Flow Control for Backward Facing Step. Computation 2022, 10, 12. https://doi.org/10.3390/computation10010012
Moulinos I, Manopoulos C, Tsangaris S. Computational Analysis of Active and Passive Flow Control for Backward Facing Step. Computation. 2022; 10(1):12. https://doi.org/10.3390/computation10010012
Chicago/Turabian StyleMoulinos, Iosif, Christos Manopoulos, and Sokrates Tsangaris. 2022. "Computational Analysis of Active and Passive Flow Control for Backward Facing Step" Computation 10, no. 1: 12. https://doi.org/10.3390/computation10010012
APA StyleMoulinos, I., Manopoulos, C., & Tsangaris, S. (2022). Computational Analysis of Active and Passive Flow Control for Backward Facing Step. Computation, 10(1), 12. https://doi.org/10.3390/computation10010012