
Analytic Solution to the Piecewise Linear Interface Construction Problem and Its Application in Curvature Calculation for Volume-of-Fluid Simulation Codes


Abstract
:1. Introduction
2. Plane–Cube Intersection
2.1. Applying Symmetry Conditions to Reduce Problem Complexity
2.2. Formulating the Inverse PLIC Problem
2.3. Inverting the Inverse PLIC Formulation Analytically
2.4. The Analytic SZ Solution
- while our solution is based on the -normalized plane normal vector, the SZ solution uses the -normalized normal vector;
- our solution takes two atan operations while the SZ solution takes one acos operation;
- our solution has a smaller number of arithmetic operations and branching than the SZ Kawano implementation, but requires more special functions.
- correct edge case behavior;
- more efficient branching by computing easier, more common cases first and less common, more computationally expensive cases last;
- micro-optimization by pre-computing redundant terms and minimizing the number of arithmetic operations and branching.
2.5. Iterative Solutions
2.6. Performance and Accuracy Comparison
2.6.1. CPU Testing
2.6.2. GPU Testing
3. Application: Curvature Calculation for VoF-LBM on the GPU
3.1. Volume-of-Fluid Overview
3.2. Obtaining Neighboring Interface Points: PLIC Point Neighborhood
3.3. Validating Curvature Calculation
3.4. Application Example: Simulating a Terminal Velocity Raindrop Impact
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AVX2 | advanced vector extensions 2 (256-bit) |
| CPU | central processing unit |
| GPU | graphics processing unit |
| LBM | lattice Boltzmann method |
| PLIC | piecewise linear interface construction |
| VoF | Volume-of-Fluid |
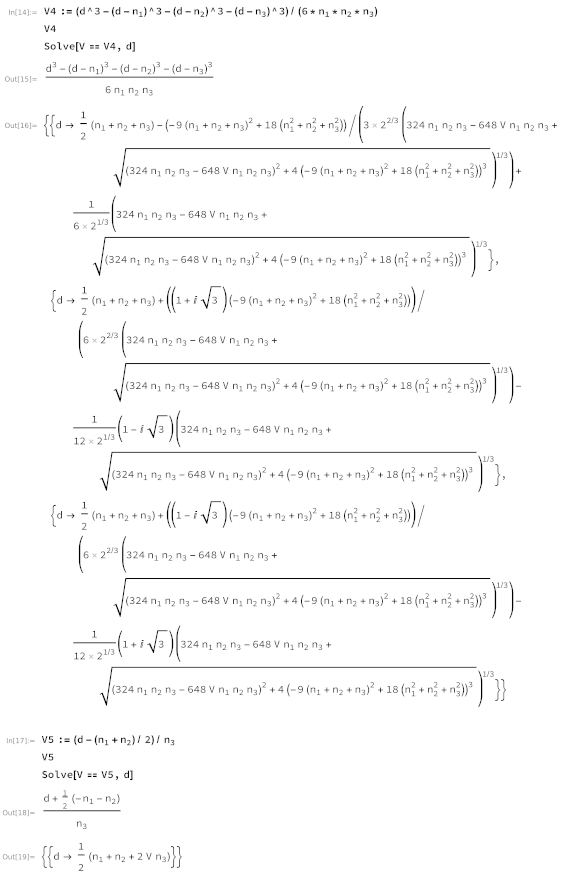
Appendix A. PLIC Inversion with Mathematica


Appendix B. Code Listings
| Listing A1. Fully optimized C implementation of the inverse PLIC solution. To avoid branching between cases (3) and (4), in the implementation, the fdimf(x,y):= max(x-y,0) function is used. Case (2) cannot be included with another fdimf(x,y) because, in case (2), division by n1 must be avoided since it could be zero. |
| float plic_cube_inverse(const float d0, const float nx, const float ny, const float nz) { // unit cube - plane intersection ↪: plane offset d0, normal vector n -> volume V0 in [0,1] const float n1 = fmin(fmin(fabs(nx), fabs(ny)), fabs(nz)); // eliminate most cases due to symmetry const float n3 = fmax(fmax(fabs(nx), fabs(ny)), fabs(nz)); const float n2 = fabs(nx)-n1+fabs(ny)+fabs(nz)-n3; const float d = 0.5f*(n1+n2+n3)-fabs(d0); // calculate PLIC with reduced symmetry, shift origin from (0.0,0.0,0.0) -> ↪ (0.5,0.5,0.5) float V; // 0.0<=V<=0.5 if(fmin(n1+n2, n3)<=d && d<=n3) { // case (5) V = (d-0.5f*(n1+n2))/n3; // avoid division by n1 and n2 } else if(d<n1) { // case (1) V = cb(d)/(6.0f*n1*n2*n3); // condition d<n1==0 is impossible if d==0.0f } else if(d<=n2) { // case (2) V = (3.0f*d*(d-n1)+sq(n1))/(6.0f*n2*n3); // avoid ;division by n1 } else { // case (3) or (4) V = (cb(d)-cb(d-n1)-cb(d-n2)-cb(fdim(d, n3)))/(6.0f*n1*n2*n3); return copysign(0.5f-V, d0)+0.5f; // apply symmetry for V0>0.5 } |
| Listing A2. Fully optimized C implementation of our analytic PLIC solution. |
| float plic_cube_reduced(const float V, const float n1, const float n2, const float n3) { const float n1pn2=n1+n2, n3xV=n3*V; if (n1pn2<=2.0f*n3xV) return n3xV+0.5f*n1pn2; // case (5) const float V6n2n3=6.0f*n2*n3xV, sqn1=sq(n1); if (V6n2n3>=sq(n1) && 3.0f*n2*(2.0f*n3xV+n1-n2)<=sqn1) return ;0.5f*n1+0.28867513f*sqrt(24.0f*n2*n3xV-sqn1); // case (2) if (V6n2n3<sqn1) return cbrt(V6n2n3*n1); // case (1) const float n1xn2=n1*n2; const float x3 = 81.0f*n1xn2*(n1pn2-2.0f*n3xV); // x3>0 const float y32 = fdim(23328.0f*cb(n1xn2), sq(x3)); // y3>=0 const float u3 = cbrt(sq(x3)+y32); const float d3 = n1pn2-(7.5595264f*n1xn2+0.26456684f*u3)*rsqrt(u3)*sin(0.5235988f-0.33333334f*atan(sqrt(y32)/x3)); // x3 ↪ >0 if(d3<=n3) return d3; // case (3) const float t4 = 9.0f*sq(n1pn2+n3)-18.0f; const float x4 = fmax(n1xn2*n3*(324.0f-648.0f*V), 1.1754944E-38f); // avoid edge case V==0.5 to make x4>0 const float y42 = 4.0f*cb(t4)-sq(x4); // y4>=0 const float u4 = cbrt(sq(x4)+y42); const float d4 = 0.5f*(n1pn2+n3)-(0.20998684f*t4+0.13228342f*u4)*rsqrt(u4)*sin(0.5235988f-0.33333334f*atan(sqrt(y42)/x4)) ↪ // x4>0 return d4; // case (4) } float plic_cube(const float V0, const float nx, const float ny, const float nz) { // unit cube - plane intersection: volume ↪ V0 in [0,1], normal vector n -> plane offset d0 const float ax=fabs(nx), ay=fabs(ny), az=fabs(nz), V=0.5f-fabs(V0-0.5f); // eliminate symmetry cases const float n1 = fmin(fmin(ax, ay), az); const float n3 = fmax(fmax(ax, ay), az); const float n2 = ax-n1+ay+az-n3; const float d = plic_cube_reduced(V, n1, n2, n3); // calculate PLIC with reduced symmetry return copysign(0.5f*(n1+n2+n3)-d, V0-0.5f); // apply symmetry for V0>0.5 } |
| Listing A3. The Fortran implementation [5] of the analytic SZ PLIC solution [4] translated to C without further optimization. |
| float plic_cube(const float V0, const float nx, const float ny, const float nz) { // unit cube - plane intersection: volume ↪ V0 in [0,1], normal vector n -> plane offset d0 const float l = fabs(nx)+fabs(ny)+fabs(nz); // length in L1 norm const float ax=fabs(nx)/l, ay=fabs(ny)/l, az=fabs(nz)/l, w=0.5f-fabs(V0-0.5f); // eliminate symmetry cases const float vm1 = fmin(fmin(ax, ay), az); const float vm3 = fmax(fmax(ax, ay), az); const float vm2 = fdim(1.0f, vm1+vm3); // ensure vm2>=0 const float vm12 = vm1+vm2; float alpha = 0.0f; const float v1 = sq(vm1)/(6.0f*vm2*vm3+1E-25f); const float w6 = 6.0f*vm1*vm2*vm3*w; if(w<v1) { alpha = cbrt(w6); // case (1) } else if(w<v1+0.5f*(vm2-vm1)/vm3) { alpha = 0.5f*(vm1+sqrt(sq(vm1)+8.0f*vm2*vm3*(w-v1))); // case (2) } else { float v3; if(vm3<vm12) { v3 = (sq(vm3)*(3.0f*vm12-vm3)+sq(vm1)*(vm1-3.0f*vm3)+sq(vm2)*(vm2-3.0f*vm3))/(6.0f*vm1*vm2*vm3); } else { v3 = 0.5f*vm12/vm3; if(v3<=w) alpha = vm3*w+0.5f*vm12; // case (5) } if(alpha==0.0f) { float a0, a1, a2; if(w<v3) { // case (3) a2 = -3.0f*vm12; a1 = 3.0f*(sq(vm1)+sq(vm2)); a0 = w6-cb(vm1)-cb(vm2); } else { // case (4) a2 = -1.5f; a1 = 1.5f*(sq(vm1)+sq(vm2)+sq(vm3)); a0 = 0.5f*(w6-cb(vm1)-cb(vm2)-cb(vm3)); } const float q0 = 0.16666667f*(a1*a2-3.0f*a0)-3.7037037E-2f*cb(a2); // 3.7037037E-2f = 1/27 const float sp = sqrt(0.11111111f*sq(a2)-0.33333334f*a1); alpha = 2.0f*sp*cos(4.1887902f+0.33333334f*acos(q0/cb(sp)))-0.33333334f*a2; // 4.1887902f = 4/3*pi } } return l*copysign(0.5f-alpha, V0-0.5f); // rescale result and apply symmetry for V0 0.5 } |
| Listing A4. Fully optimized C implementation of the SZ PLIC solution. |
| float plic_cube_reduced(const float V, const float n1, const float n2, const float n3) { // optimized solution from SZ and ↪ Kawano const float n12=n1+n2, n3V=n3*V; if(n12<=2.0f*n3V) return n3V+0.5f*n12; // case (5) const float sqn1=sq(n1), n26=6.0f*n2, v1=sqn1/n26; // after case (5) check n2>0 is true if(v1<=n3V && n3V<v1+0.5f*(n2-n1)) return 0.5f*(n1+sqrt(sqn1+8.0f*n2*(n3V-v1))); // case (2) const float V6 = n1*n26*n3V; if(n3V<v1) return cbrt(V6); // case (1) const float v3 = n3<n12 ? (sq(n3)*(3.0f*n12-n3)+sqn1*(n1-3.0f*n3)+sq(n2)*(n2-3.0f*n3))/(n1*n26) : 0.5f*n12; // after case ↪ (2) check n1>0 is true const float sqn12=sqn1+sq(n2), V6cbn12=V6-cb(n1)-cb(n2); const bool case34 = n3V<v3; // true: case (3), false: case (4) const float a = case34 ? V6cbn12 : 0.5f*(V6cbn12-cb(n3)); const float b = case34 ? sqn12 : 0.5f*(sqn12+sq(n3)); const float c = case34 ? n12 : 0.5f; const float t = sqrt(sq(c)-b); return c-2.0f*t*sin(0.33333334f*asin((cb(c)-0.5f*a-1.5f*b*c)/cb(t))); } float plic_cube(const float V0, const float nx, const float ny, const float nz) { // unit cube - plane intersection: volume ↪ V0 in [0,1], normal vector n -> plane offset d0 const float ax=fabs(nx), ay=fabs(ny), az=fabs(nz), V=0.5f-fabs(V0-0.5f), l=ax+ay+az; // eliminate symmetry cases, ↪ normalize n using L1 norm const float n1 = fmin(fmin(ax, ay), az)/l; const float n3 = fmax(fmax(ax, ay), az)/l; const float n2 = fdim(1.0f, n1+n3); // ensure n2>=0 const float d = plic_cube_reduced(V, n1, n2, n3); // calculate PLIC with reduced symmetry return l*copysign(0.5f-d, V0-0.5f); // rescale result and apply symmetry for V0>0.5 } |
| Listing A5. C implementation of the iterative nested-intervals solution for cases (3) and (4). |
| int log2_fast(const float x) { // evil log2 hack: log2(x)=(as_uint(x)>>23)-127 return (as_uint(x)>>23)-127; } float plic_cube_reduced(const float V, const float n1, const float n2, const float n3) { const float n1pn2=n1+n2, n3xV=n3*V; if(n1pn2<=2.0f*n3xV) return n3xV+0.5f*n1pn2; // case (5) const float V6n2n3=6.0f*n2*n3xV, sqn1=sq(n1); if(V6n2n3>=sq(n1) && 3.0f*n2*(2.0f*n3xV+n1-n2)<=sqn1) return 0.5f*n1+0.28867513f*sqrt(24.0f*n2*n3xV-sqn1); // case (2) if(V6n2n3<sqn1) return cbrt(V6n2n3*n1); // case (1) const float V6n1n2n3 = V6n2n3*n1; float dmin, dmax, d; uint k; dmin=n2; dmax=n1+n2; d=0.5f*(dmin+dmax); k = (uint)log2_fast((dmax-dmin)*1.67772162E7f); // deterdmine number of interval halvings to reach machine precision for(uint i=0; i<=k; i++) { if(cb(d)-cb(d-n1)-cb(d-n2)<V6n1n2n3) dmin = d; else dmax = d; d = 0.5f*(dmin+dmax); } if(d<=n3) return d; // case (3) dmin=n3; dmax=0.5f*(n1+n2+n3); d=0.5f*(dmin+dmax); k = (uint)log2_fast((dmax-dmin)*1.67772162E7f); // deterdmine number of interval halvings to reach machine precision for(uint i=0; i<=k; i++) { if(cb(d)-cb(d-n1)-cb(d-n2)-cb(d-n3)<V6n1n2n3) dmin = d; else dmax = d; d = 0.5f*(dmin+dmax); } return d; } float plic_cube(const float V0, const float nx, const float ny, const float nz) { const float n1 = fmin(fmin(fabs(nx), fabs(ny)), fabs(nz)); // eliminate most cases due to symmetry const float n3 = fmax(fmax(fabs(nx), fabs(ny)), fabs(nz)); const float n2 = fabs(nx)-n1+fabs(ny)+fabs(nz)-n3; const float V = 0.5f-fabs(V0-0.5f); const float d = plic_cube_reduced(V, n1, n2, n3); return copysign(0.5f*(n1+n2+n3)-d, V0-0.5f); // apply symmetry for V0>0.5 } |
| Listing A6. C implementation of the iterative Newton–Raphson solution for cases (1), (3) and (4). Calculating case (1) with Newton–Raphson as well instead of the cbrt() function results in a very small but noticeable improvement in performance when executed on the CPU. |
| float plic_cube_reduced(const float V, const float n1, const float n2, const float n3) { const float n1pn2=n1+n2, n3xV=n3*V; if(n1pn2<=2.0f*n3xV) return n3xV+0.5f*n1pn2; // case (5) const float V6n2n3=6.0f*n2*n3xV, sqn1=sq(n1); if(V6n2n3>=sq(n1) && 3.0f*n2*(2.0f*n3xV+n1-n2)<=sqn1) return 0.5f*n1+0.28867513f*sqrt(24.0f*n2*n3xV-sqn1); // case (2) const float V6n1n2n3 = V6n2n3*n1; float dmin, dmax, d; if(V6n2n3<sqn1) { dmin=0.0f; dmax=n1; d=0.5f*(dmin+dmax); for(uint i=0; i<7; i++) { const float f = cb(d)-V6n1n2n3; const float fs = 3.0f*sq(d); d -= f/fs; } return d; // case (1) } dmin=n2; dmax=n1+n2; d=0.5f*(dmin+dmax); for(uint i=0; i<4; i++) { const float f = cb(d)-cb(d-n1)-cb(d-n2)-V6n1n2n3; const float fs = 3.0f*(sq(d)-sq(d-n1)-sq(d-n2)); d -= f/fs; } if(d<=n3) return d; // case (3) dmin=n3; dmax=0.5f*(n1+n2+n3); d=0.5f*(dmin+dmax); for(uint i=0; i<4; i++) { const float f = cb(d)-cb(d-n1)-cb(d-n2)-cb(d-n3)-V6n1n2n3; const float fs = 3.0f*(sq(d)-sq(d-n1)-sq(d-n2)-sq(d-n3)); d -= f/fs; } return d; // case (4) } float plic_cube(const float V0, const float nx, const float ny, const float nz) { const float n1 = fmin(fmin(fabs(nx), fabs(ny)), fabs(nz)); // eliminate most cases due to symmetry const float n3 = fmax(fmax(fabs(nx), fabs(ny)), fabs(nz)); const float n2 = fabs(nx)-n1+fabs(ny)+fabs(nz)-n3; const float V = 0.5f-fabs(V0-0.5f); const float d = plic_cube_reduced(V, n1, n2, n3); return copysign(0.5f*(n1+n2+n3)-d, V0-0.5f); // apply symmetry for V0>0.5 } |
Appendix C. Paraboloid Curvature, Interface Normal and Least-Squares Fit
Appendix C.1. Calculating the Interface Normal Vector from a 33 Neighborhood
Appendix C.2. Analytic Curvature of a Paraboloid
Appendix C.3. Curvature from Least-Squares Paraboloid Fit
References
- Youngs, D.L. Time-dependent multi-material flow with large fluid distortion. In Numerical Methods in Fluid Dynamics; Academic Press: Cambridge, MA, USA, 1982. [Google Scholar]
- Youngs, D.L. An Interface Tracking Method for a 3D Eulerian Hydrodynamics Code; Technical Report; Atomic Weapons Research Establishment (AWRE): Aldermaston, UK, 1984; Volume 44, p. 35. [Google Scholar]
- Janßen, C.F.; Grilli, S.T.; Krafczyk, M. On enhanced non-linear free surface flow simulations with a hybrid LBM–VOF model. Comput. Math. Appl. 2013, 65, 211–229. [Google Scholar] [CrossRef]
- Scardovelli, R.; Zaleski, S. Analytical relations connecting linear interfaces and volume fractions in rectangular grids. J. Comput. Phys. 2000, 164, 228–237. [Google Scholar] [CrossRef]
- Kawano, A. A simple volume-of-fluid reconstruction method for three-dimensional two-phase flows. Comput. Fluids 2016, 134, 130–145. [Google Scholar] [CrossRef] [Green Version]
- Lehmann, M.; Oehlschlägel, L.M.; Häusl, F.P.; Held, A.; Gekle, S. Ejection of marine microplastics by raindrops: A computational and experimental study. Microplastics Nanoplastics 2021, 1, 18. [Google Scholar] [CrossRef]
- Laermanns, H.; Lehmann, M.; Klee, M.; Löder, M.G.; Gekle, S.; Bogner, C. Tracing the horizontal transport of microplastics on rough surfaces. Microplastics Nanoplastics 2021, 1, 11. [Google Scholar] [CrossRef]
- Lehmann, M. High Performance Free Surface LBM on GPUs. Master’s Thesis, University of Bayreuth, Bayreuth, Germany, 2019. [Google Scholar]
- Bogner, S.; Rüde, U.; Harting, J. Curvature estimation from a volume-of-fluid indicator function for the simulation of surface tension and wetting with a free-surface lattice Boltzmann method. Phys. Rev. E 2016, 93, 043302. [Google Scholar] [CrossRef] [Green Version]
- Körner, C.; Thies, M.; Hofmann, T.; Thürey, N.; Rüde, U. Lattice Boltzmann model for free surface flow for modeling foaming. J. Stat. Phys. 2005, 121, 179–196. [Google Scholar] [CrossRef]
- Thürey, N.; Körner, C.; Rüde, U. Interactive Free Surface Fluids with the Lattice Boltzmann Method; Technical Report 05-4; University of Erlangen-Nuremberg: Erlangen, Germany, 2005. [Google Scholar]
- Pohl, T. High Performance Simulation of Free Surface Flows Using the Lattice Boltzmann Method; Verlag Dr. Hut: Erlangen, Germany, 2008. [Google Scholar]
- Schreiber, M.; Neumann, P.; Zimmer, S.; Bungartz, H.J. Free-surface lattice-Boltzmann simulation on many-core architectures. Procedia Comput. Sci. 2011, 4, 984–993. [Google Scholar] [CrossRef] [Green Version]
- Popinet, S. An accurate adaptive solver for surface-tension-driven interfacial flows. J. Comput. Phys. 2009, 228, 5838–5866. [Google Scholar] [CrossRef] [Green Version]
- Jafari, A.; Shirani, E.; Ashgriz, N. An improved three-dimensional model for interface pressure calculations in free-surface flows. Int. J. Comput. Fluid Dyn. 2007, 21, 87–97. [Google Scholar] [CrossRef]
- Xing, X.Q.; Butler, D.L.; Yang, C. Lattice Boltzmann-based single-phase method for free surface tracking of droplet motions. Int. J. Numer. Methods Fluids 2007, 53, 333–351. [Google Scholar] [CrossRef]
- Donath, S. Wetting Models for a Parallel High-Performance Free Surface Lattice Boltzmann Method: Benetzungsmodelle Für Eine Parallele Lattice-Boltzmann-Methode Mit Freien Oberflächen; Verlag Dr. Hut: Erlangen, Germany, 2011. [Google Scholar]
- Donath, S.; Mecke, K.; Rabha, S.; Buwa, V.; Rüde, U. Verification of surface tension in the parallel free surface lattice Boltzmann method in waLBerla. Comput. Fluids 2011, 45, 177–186. [Google Scholar] [CrossRef]
- Anderl, D.; Bogner, S.; Rauh, C.; Rüde, U.; Delgado, A. Free surface lattice Boltzmann with enhanced bubble model. Comput. Math. Appl. 2014, 67, 331–339. [Google Scholar] [CrossRef]
- Obrecht, C.; Kuznik, F.; Tourancheau, B.; Roux, J.J. A new approach to the lattice Boltzmann method for graphics processing units. Comput. Math. Appl. 2011, 61, 3628–3638. [Google Scholar] [CrossRef] [Green Version]
- Wittmann, M. Hardware-effiziente, hochparallele Implementierungen von Lattice-Boltzmann-Verfahren für komplexe Geometrien. Ph.D. Thesis, Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU), Nürnberg, Germany, 2016. [Google Scholar]
- Delbosc, N.; Summers, J.L.; Khan, A.; Kapur, N.; Noakes, C.J. Optimized implementation of the Lattice Boltzmann Method on a graphics processing unit towards real-time fluid simulation. Comput. Math. Appl. 2014, 67, 462–475. [Google Scholar] [CrossRef]
- Herschlag, G.; Lee, S.; Vetter, J.S.; Randles, A. GPU data access on complex geometries for d3q19 lattice Boltzmann method. In Proceedings of the 2018 IEEE International Parallel and Distributed Processing Symposium (IPDPS), Vancouver, BC, Canada, 21–25 May 2018; pp. 825–834. [Google Scholar]
- Mawson, M.J.; Revell, A.J. Memory transfer optimization for a lattice Boltzmann solver on Kepler architecture nVidia GPUs. Comput. Phys. Commun. 2014, 185, 2566–2574. [Google Scholar] [CrossRef] [Green Version]
- Wittmann, M.; Zeiser, T.; Hager, G.; Wellein, G. Comparison of different propagation steps for lattice Boltzmann methods. Comput. Math. Appl. 2013, 65, 924–935. [Google Scholar] [CrossRef]
- Kuznik, F.; Obrecht, C.; Rusaouen, G.; Roux, J.J. LBM based flow simulation using GPU computing processor. Comput. Math. Appl. 2010, 59, 2380–2392. [Google Scholar] [CrossRef] [Green Version]
- Krüger, T.; Kusumaatmaja, H.; Kuzmin, A.; Shardt, O.; Silva, G.; Viggen, E.M. The Lattice Boltzmann Method; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; Volume 10, pp. 4–15. [Google Scholar]
- Chapman, S.; Cowling, T.G.; Burnett, D. The Mathematical Theory of Non-Uniform Gases: An Account of the Kinetic Theory of Viscosity, Thermal Conduction and Diffusion in Gases; Cambridge University Press: Cambridge, MA, USA, 1990. [Google Scholar]
- Purqon, A. Accuracy and Numerical Stabilty Analysis of Lattice Boltzmann Method with Multiple Relaxation Time for Incompressible Flows. J. Phys. Conf. Ser. 2017, 877, 012035. [Google Scholar]
- Wu, X.; Wu, E. Bubble creation and multi-fluids interaction. In Proceedings of the 2009 11th IEEE International Conference on Computer-Aided Design and Computer Graphics, Huangshan, China, 19–21 August 2009; pp. 87–91. [Google Scholar]
- Yuan, M.; Yang, Y.; Li, T.; Hu, Z. Numerical simulation of film boiling on a sphere with a volume of fluid interface tracking method. Int. J. Heat Mass Transf. 2008, 51, 1646–1657. [Google Scholar] [CrossRef]
- Ma, C.; Bothe, D. A VOF-based method for the simulation of thermocapillary flow. In APS Division of Fluid Dynamics Meeting Abstracts; Technical University Darmstadt: Darmstadt, Germany, 2010; Volume 63, p. HW-008. [Google Scholar]
- Booshi, S.; Ketabdari, M.J. Modeling of solitary wave interaction with emerged porous breakwater using PLIC-VOF method. Ocean Eng. 2021, 241, 110041. [Google Scholar] [CrossRef]
- Sato, K.; Koshimura, S. A lattice Boltzmann approach for three-dimensional tsunami simulation based on the PLIC-VOF method. Coast. Eng. Proc. 2018, 36, 90. [Google Scholar] [CrossRef] [Green Version]
- Sheng, M.; Chen, W.; Liu, J.; Shi, S. Ejecting performance simulation of an innovative piezoelectric actuated lubrication generator for space mechanisms. Int. J. Mech. Sci. 2011, 53, 867–871. [Google Scholar] [CrossRef]
- Meredith, J.S.; Childs, H. Visualization and Analysis-Oriented Reconstruction of Material Interfaces. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2010; Volume 29, pp. 1241–1250. [Google Scholar]
- NVIDIA. Parallel Thread Execution ISA Version 6.4. 2019. Available online: https://docs.nvidia.com/cuda/parallel-thread-execution/ (accessed on 21 July 2021).
- Ataei, M.; Bussmann, M.; Shaayegan, V.; Costa, F.; Han, S.; Park, C.B. NPLIC: A machine learning approach to piecewise linear interface construction. Comput. Fluids 2021, 223, 104950. [Google Scholar] [CrossRef]
- Porcù, F.; D’adderio, L.P.; Prodi, F.; Caracciolo, C. Effects of altitude on maximum raindrop size and fall velocity as limited by collisional breakup. J. Atmos. Sci. 2013, 70, 1129–1134. [Google Scholar] [CrossRef]
- Bourke, P. Polygonising a Scalar Field. 1994. Available online: http://paulbourke.net/geometry/polygonise/ (accessed on 21 July 2021).
- Lorensen, W.E.; Cline, H.E. Marching cubes: A high resolution 3D surface construction algorithm. ACM Siggraph Comput. Graph. 1987, 21, 163–169. [Google Scholar] [CrossRef]
- Vega, D.; Abache, J.; Coll, D. A Fast and Memory-Saving Marching Cubes 33 Implementation with the Correct Interior Test. J. Comput. Graph. Tech. Vol. 2019, 3. Available online: https://jcgt.org/published/0008/03/01/paper.pdf (accessed on 21 July 2021).
- Parker, B.; Youngs, D. Two and Three Dimensional Eulerian Simulation of Fluid Flow with Material Interfaces; Atomic Weapons Establishment: Aldermaston, UK, 1992. [Google Scholar]
- Pressley, A.N. Elementary Differential Geometry; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Abbena, E.; Salamon, S.; Gray, A. Modern Differential Geometry of Curves and Surfaces with Mathematica; Chapman and Hall/CRC: Boca Raton, FL, USA, 2017. [Google Scholar]
- Yu, J.; Yin, X.; Gu, X.; McMillan, L.; Gortler, S. Focal surfaces of discrete geometry. In ACM International Conference Proceeding Series; Eurographics Association/Association for Computing Machinery: Norrköping, Sweden, 2007; Volume 257, pp. 23–32. [Google Scholar]
- Har’el, Z. Curvature of Curves and Surfaces—A Parabolic Approach; Department of Mathematics, Technion–Israel Institute of Technology: Haifa, Israel, 1995. [Google Scholar]
- Jia, Y.B. Gaussian and Mean Curvatures; Com S 477/577 Notes; Iowa State University: Ames, IA, USA, 2018. [Google Scholar]
- Eberly, D. Least Squares Fitting of Data; Magic Software: Chapel Hill, NC, USA, 2000. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PLIC Variant | Arithmetic Ops | Branching | sin/cos | asin/acos | atan | |||
|---|---|---|---|---|---|---|---|---|
| Listing A2 our solution | 95 | 4 | 2 | 3 | 3 | 2 | 2 | |
| Listing A3 SZ Kawano | 123 | 6 | 2 | 1 | 1 | 1 | ||
| Listing A4 SZ optimized | 97 | 3 | 2 | 1 | 1 | 1 | ||
| Listing A5 nested intervals | 1 | 1 | ||||||
| Listing A6 Newton-Raphson | 308 | 4 | 1 |
| PLIC Variant | Execution Time/ns | |
|---|---|---|
| Listing A2 our analytic solution | ||
| Listing A3 SZ solution by Kawano | ||
| Listing A4 SZ solution optimized | ||
| Listing A5 nested intervals | ||
| Listing A6 Newton-Raphson |
| PLIC Variant | Execution Time/ns | |
|---|---|---|
| Listing A2 our analytic solution | ||
| Listing A3 SZ solution by Kawano | ||
| Listing A4 SZ solution optimized | ||
| Listing A5 nested intervals | ||
| Listing A6 Newton-Raphson |
| PLIC Variant | Execution Time/ns | |
|---|---|---|
| Listing A2 our analytic solution | ||
| Listing A3 SZ solution by Kawano | ||
| Listing A4 SZ solution optimized | ||
| Listing A5 nested intervals | ||
| Listing A6 Newton-Raphson |
| PLIC Variant | Execution Time/ps | TFLOPs/s | |||
|---|---|---|---|---|---|
| Listing A2 our analytic solution | 189 | 13 | |||
| Listing A3 SZ solution by Kawano | 149 | 14 | |||
| Listing A4 SZ solution optimized | 132 | 12 | |||
| Listing A5 nested intervals | 106 | 13 | |||
| Listing A6 Newton-Raphson | 256 | 11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lehmann, M.; Gekle, S. Analytic Solution to the Piecewise Linear Interface Construction Problem and Its Application in Curvature Calculation for Volume-of-Fluid Simulation Codes. Computation 2022, 10, 21. https://doi.org/10.3390/computation10020021
Lehmann M, Gekle S. Analytic Solution to the Piecewise Linear Interface Construction Problem and Its Application in Curvature Calculation for Volume-of-Fluid Simulation Codes. Computation. 2022; 10(2):21. https://doi.org/10.3390/computation10020021
Chicago/Turabian StyleLehmann, Moritz, and Stephan Gekle. 2022. "Analytic Solution to the Piecewise Linear Interface Construction Problem and Its Application in Curvature Calculation for Volume-of-Fluid Simulation Codes" Computation 10, no. 2: 21. https://doi.org/10.3390/computation10020021