Abstract
In this work, we investigate the transition from regular dynamics to chaotic behavior in a one-dimensional quartic anharmonic classical oscillator driven by a time-dependent external square-wave force. Owing to energy conservation, the motion of an undriven quartic anharmonic oscillator is regular, periodic, and stable. For a driven quartic anharmonic oscillator, the equations of motion cannot be solved analytically due to the presence of an anharmonic term in the potential energy function. Using the fourth-order Runge–Kutta method to numerically solve the equations of motion for the driven quartic anharmonic oscillator, we find that the oscillator motion under the influence of a sufficiently small driving force remains regular, while by gradually increasing the driving force, a series of nonlinear resonances can occur, grow, overlap, and ultimately disappear due to the emergence of chaos.
1. Introduction
Chaos refers to the unpredictable and seemingly random behavior exhibited by certain dynamical systems [1,2,3,4,5]. In chaos theory, a dynamical system is said to be chaotic when small changes in initial conditions can yield vastly different outcomes, a phenomenon often described as “sensitive dependence on initial conditions”. A famous cliché of chaos theory is the butterfly effect, where a minor change, like a butterfly flapping its wings at an earlier time, can lead to significant consequences, such as altering weather patterns. For more detailed information on the butterfly effect, refer to the review of Shen et al. [6].
Classical mechanics describes the motion of objects based on Newton’s equation of motion. According to Newton’s equation of motion, if the state (e.g., position and velocity) of an object at the present time is known, the state of the object in the future is determined. Therefore, classical systems are said to follow deterministic rules. Previous studies in chaos theory and nonlinear dynamics have provided a rich understanding of how deterministic, classical systems can create unpredictable behavior [7,8,9,10,11,12]. Generally, the long-term behavior of classical chaotic systems cannot be easily predicted due to the complex interactions and feedbacks within the systems.
The simple harmonic oscillator is a conventional linear, homogeneous system behaving regularly [10,12,13]. The system follows the superposition principle [12,13,14,15], ensuring that small changes in the initial conditions yield proportionally small and predictable changes in the evolution of the system [16]. Chaos, on the other hand, requires nonlinear dynamics, where small changes in the initial conditions can lead to disproportionately large and complex responses at a later time [7]. In general, for the simple harmonic oscillator, a purely time-varying driving force cannot introduce the sensitive dependence on initial conditions required for chaotic behavior. By contrast, Saiki and Yorke [17] showed that in some linear systems, off-diagonal matrix entries can cause finite-time growth rates, and can greatly affect the behavior of the systems, exhibiting sensitive dependence on initial conditions.
Recently, Lee et al. [10] discussed how nonlinear resonances, resonance overlaps, and chaos can be generated in a one-dimensional simple harmonic oscillator driven by an external force that depends on both position and time. In their study, as the position- and time-dependent external driving force was nonlinear in terms of position, the resonance overlaps and chaos were generated in the driven harmonic oscillator effectively via nonlinear dynamics. However, the types of position- and time-dependent external driving forces, which can greatly affect the regular and chaotic patterns of the driven harmonic oscillator, were not fully discussed in their study.
Relative to the simple harmonic oscillator (i.e., a linear oscillator), a nonlinear oscillator can be significantly influenced by time-dependent external driving forces, since its trajectories can present serious and permanent distortions [7,8,9,12]. Under some conditions, nonlinear resonances can be generated, and chaotic motion can occur when neighboring resonances overlap [7]. Therefore, the present work builds upon these findings by examining the effect of purely time-varying driving forces in a one-dimensional nonlinear classical oscillator, expanding the understanding of how nonlinearities and time-dependent external driving forces interact to produce chaotic behavior.
Among a wide variety of time-dependent external driving forces, sinusoidal periodic driving forces are perhaps the most commonly adopted. Since a sinusoidal wave is a periodic wave containing only a single frequency component (i.e., a pure tone), there are no harmonics present in a sinusoidal wave. On the other hand, there are also non-sinusoidal periodic driving forces [10,13,18,19], such as square waves, triangle waves, and sawtooth waves. In particular, a square wave is a periodic wave in which the amplitude alternates at a constant frequency between two fixed values (i.e., the maximum and minimum values), with the same amount of time spent at each value and with instantaneous transitions between the two values. In addition, a square wave can be expressed as the sum of an infinite number of sinusoidal periodic waves, containing only odd harmonics whose frequencies are odd multiples of the fundamental frequency of the square wave. Therefore, a square wave has a more abundant and more complex frequency spectrum when compared to a sinusoidal wave. This complexity can greatly contribute to the occurrence of nonlinear resonances.
The purpose of this work is to investigate the onset of nonlinear resonances, resonance overlaps, and chaos in a one-dimensional nonlinear classical oscillator driven by a time-dependent external square-wave force. By examining the role of an anharmonic term in the potential energy function, particularly a quartic term, this work seeks to identify the conditions under which chaos arises, including the influence of parameters like anharmonicity and driving force amplitude.
2. One-Dimensional Quartic Anharmonic Oscillator Driven by a Time-Dependent External Square-Wave Force
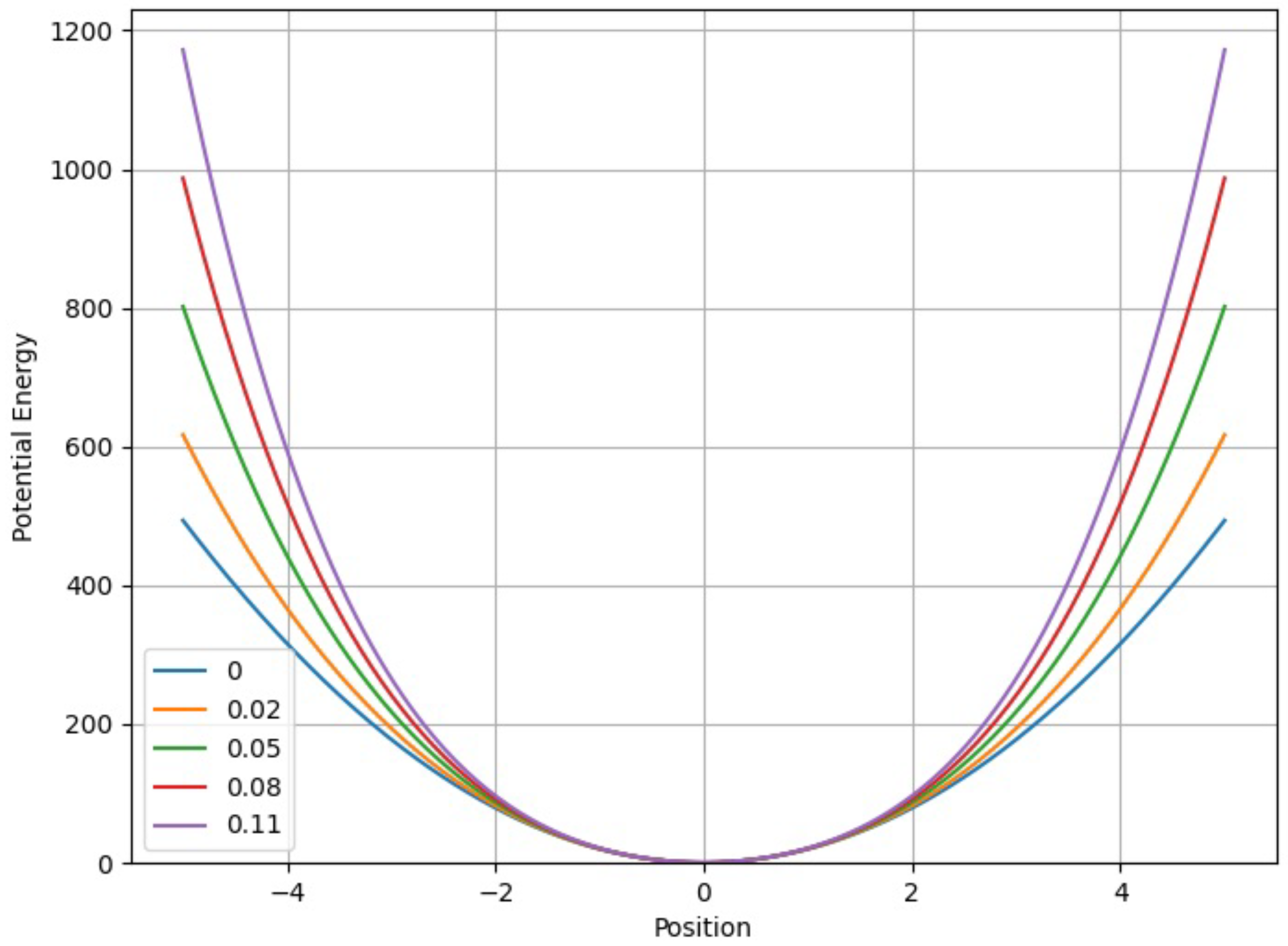
Consider a one-dimensional nonlinear classical oscillator in which the damping effect is neglected for simplicity. The potential energy of the oscillator, as a function of the oscillator position x, is described by . Without a loss of generality, the origin is set to be the stable equilibrium position of the oscillator, and the corresponding potential energy is set to be zero (i.e., ). Suppose that the potential energy function can be expanded with a Taylor series around . By requiring that is an even function of x (i.e., ), and the amplitude of the oscillations is small enough (i.e., the higher-order terms in the expansion can be ignored), the simplest nonlinear oscillator is perhaps a quartic anharmonic oscillator (QAHO) [12], with the potential energy function (see Figure 1):
where k is the harmonic force constant, and is the anharmonic force constant. As both k and are positive constants in this study, is non-negative. The potential energy function yields a conservative force (often called a restoring force)
acting on the oscillator at position x.
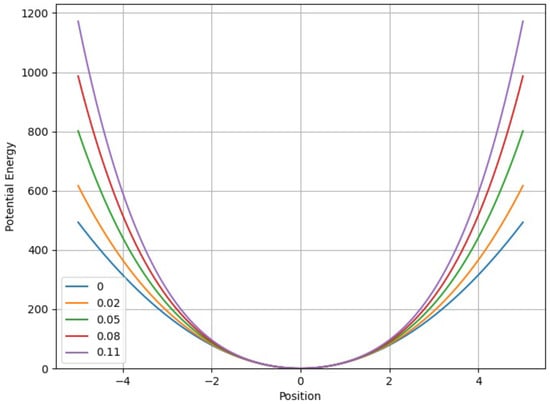
Figure 1.
Potential energy of a one-dimensional quartic anharmonic oscillator, as a function of the oscillator position x, for and = 0, 0.02, 0.05, 0.08, and 0.11. In the case of , the quartic anharmonic oscillator reduces to the simple harmonic oscillator.
For , a time-dependent external square-wave driving force of angular frequency (also called the fundamental angular frequency),
is applied to the quartic anharmonic oscillator, where (i.e., a positive constant) is the amplitude of the driving force, and is given by [10]
with being the period of the driving force, and n = 0, 1, 2, ⋯. Note that the function can be expanded in Fourier series as
containing only odd harmonics (i.e., with angular frequencies , , , ⋯). This shows that the square wave extends infinitely in angular frequency, though the amplitude of each harmonic decreases with increasing angular frequency.
Accordingly, Newton’s equation of motion for the driven quartic anharmonic oscillator is given by
where m is the mass of the oscillator, , , and are the position, velocity, and acceleration, respectively, of the oscillator at time t, and is the net force acting on the oscillator at position x at time t.
Note that Equation (6) (with , , and ) resembles the forced, undamped, hardening Duffing equation [20]. Over the past few years, the Duffing equation, under various conditions, has been extensively studied [21]. For example, Bender and Orszag [22] investigated an unforced problem with and , revealing nonlinear oscillatory solutions with frequency modulations. Blanchard, Devaney, and Hall [23] discussed a forced problem with and , yielding chaotic solutions. Shen [24] studied an unforced problem with and , exhibiting two types of oscillatory solutions and homoclinic orbits.
Also, Equation (6) is a second-order ordinary differential equation (ODE), which is equivalent to a pair of first-order ODEs (often called the equations of motion), given by
Given the initial position and velocity of the oscillator, all the future positions and velocities of the oscillator are determined by the equations of motion (see Equations (7) and (8)).
In this study, all the parameters are given in arbitrary units. The parameters , , and are adopted in all the calculations. Our goal is to investigate the chaotic regions that emerge with varying the anharmonic force constant () and driving force amplitude () of the driven quartic anharmonic oscillator (see Equation (6)).
3. Results and Discussion
3.1.
In the limiting case where (i.e., in the absence of anharmonicity), the quartic anharmonic oscillator reduces to the simple harmonic oscillator of natural angular frequency . Note that the driving force (see Equation (3)) is a time-dependent external square-wave force of fundamental angular frequency , which can be expressed as the sum of an infinite number of sinusoidal periodic waves, containing only odd harmonics (see Equation (5)), and the driven harmonic oscillator is a linear system which obeys the superposition principle [12,13,14,15]. Consequently, resonance can occur in the driven harmonic oscillator when the angular frequency of one of the odd harmonics is the same as the natural angular frequency of the harmonic oscillator [13], leading to the resonance condition = , , , ⋯. Nonetheless, since this resonance condition is independent of the oscillator energy [10], nonlinear resonances and chaos cannot be induced in the case of .
3.2.
In the limiting case where (i.e., in the absence of an external driving force), Equation (6) (with ) resembles the undriven, undamped, hardening Duffing equation [20], wherein exact analytical solutions exist in the form of Jacobi elliptic functions [25,26]. In this case, however, the quartic anharmonic oscillator experiences only the conservative force (i.e., the restoring force) (see Equation (2)). Accordingly, the total energy (i.e., the sum of the kinetic energy and potential energy (see Equation (1))) of the oscillator, at any time t, remains constant,
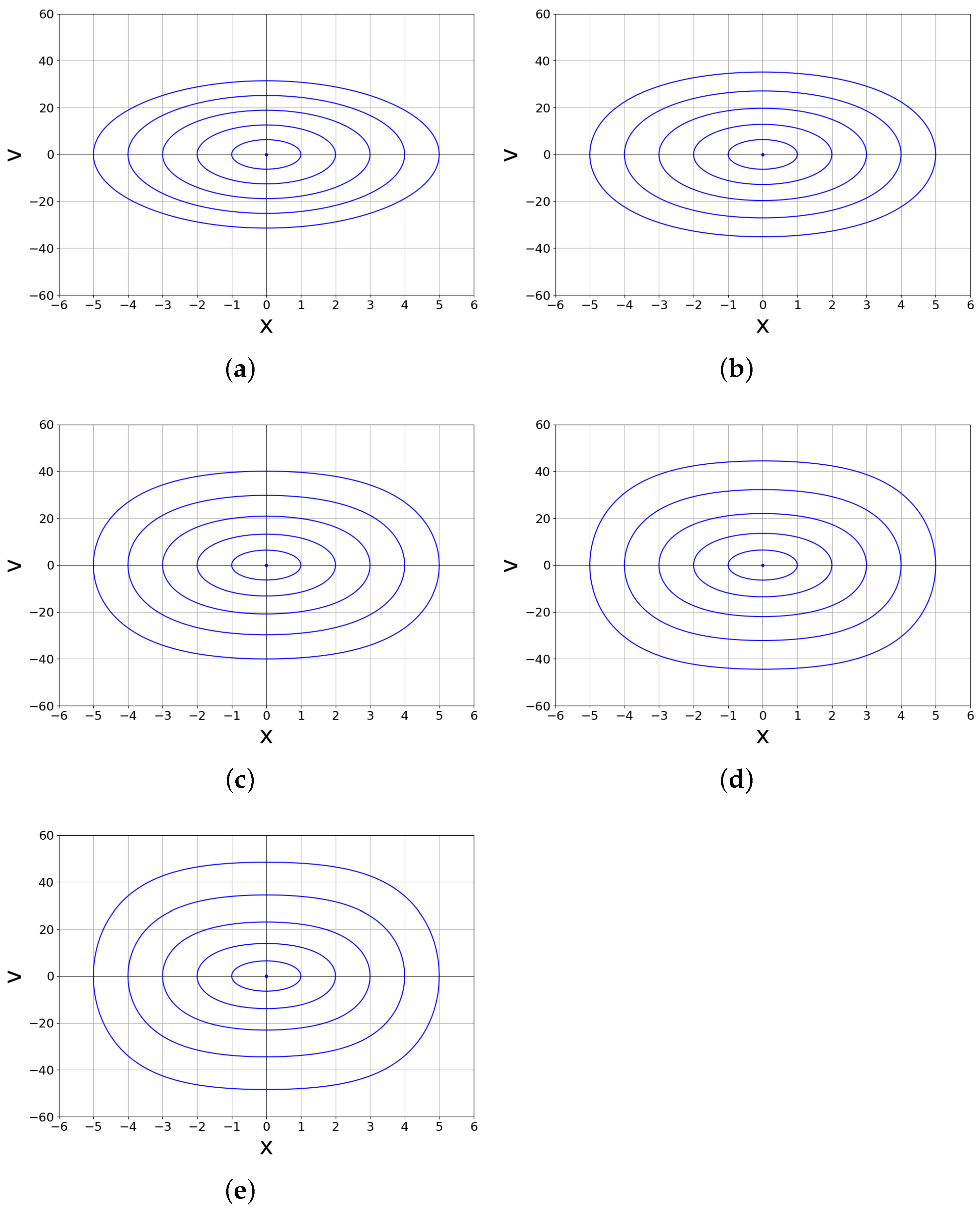
Note that the initial energy of the oscillator is non-negative by definition. Owing to energy conservation, only the states with the same energy as the initial condition are accessible. Consequently, the only fixed point (i.e., the state where the system does not change over time) is the origin (x, v) = (0, 0) of the phase space, corresponding to the case of . As shown in Figure 2, in any case where is positive, the motion of the oscillator is regular, periodic, and stable, following a single, closed, exact trajectory surrounding the origin of the phase space.
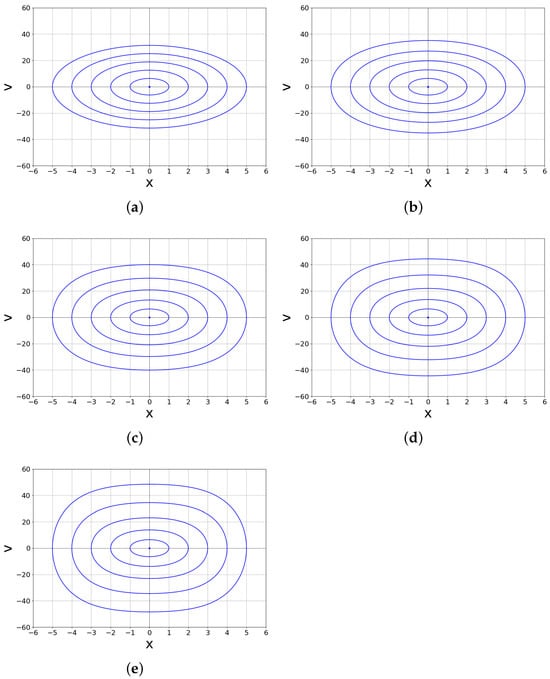
Figure 2.
Phase-space plots for the undriven quartic anharmonic oscillator (see Equation (6)), with and = (a) 0, (b) 0.02, (c) 0.05, (d) 0.08, and (e) 0.11. In the case of , the quartic anharmonic oscillator reduces to the simple harmonic oscillator.
The conservative nature of the system in the absence of suggests that small changes in the initial conditions yield proportionally small and predictable changes in the trajectories. Accordingly, chaos, which requires sensitive dependence on initial conditions and exponential divergence of trajectories, cannot be produced in the case of . This is also a consequence of the Poincaré-Bendixson theorem [27], i.e., no bounded motion of a plane autonomous system can be chaotic.
For chaos to occur, a time-dependent external square-wave driving force (with ) can be applied to the quartic anharmonic oscillator (with ), introducing irregular energy inputs that may break the regularity of the aforementioned periodic and stable motion.
3.3. and
When a time-dependent external square-wave driving force is applied to the quartic anharmonic oscillator (see Equation (6)), this system becomes non-autonomous, and the Poincaré–Bendixson theorem [27] does not apply. In general, the behavior of a non-autonomous system is considerably more complicated than that of an autonomous system. For the driven quartic anharmonic oscillator (with and ), we investigate the chaotic regions that emerge with varying the anharmonic force constant = 0.02, 0.05, 0.08, and 0.11 and the driving force amplitude = 0.001, 0.01, 0.1, 1, 3, 5, 7, 9, 11, and 13.
Owing to the presence of the anharmonic term in the potential energy function , the equations of motion, i.e., a pair of first-order ODEs (see Equations (7) and (8)), cannot be solved analytically. Consequently, in this work, the fourth-order Runge–Kutta (RK4) method [14,15,28] is adopted to numerically solve the equations of motion. The RK4 method is a widely used method for obtaining the numerical solutions of ODEs due to its decent balance between accuracy and efficiency. In particular, the RK4 method has previously been employed to study chaotic systems [28], demonstrating that the RK4 method can effectively handle both the deterministic and noise-driven aspects of nonlinear dynamics.
At time , the trajectories start at the initial coordinates = , , , ⋯, 4.6, 4.8, and 5.0 and . By varying the initial conditions, it is possible to distinguish different regions (regular or chaotic) of the phase space, in particular the resonances [7,9,10]. A time step of is adopted for the integration of the equations of motion, and the dynamics runs for a total of time steps.
A Poincaré map (also referred to as Poincaré section or Poincaré surface of section) [7,9,10] is the selection of a specific plane in phase space, representing the trajectories in a space dimension that are one dimension lower than the original space. The Poincaré map is a commonly used method for understanding chaos in dynamical systems. In this work, to obtain information about different regions of the phase space, and we plot the Poincaré maps for the driven quartic anharmonic oscillator (see Equation (6)), with various values of and , obtained by marking the phase-space positions (, ) of the oscillator at , with n = 0, 1, 2, ⋯ (i.e., only once per period of the driving force).
As presented in Figure 3, Figure 4, Figure 5, Figure 6, there are various regions (regular or chaotic) of the phase space for the driven quartic anharmonic oscillator (with ). Apparently, the regular and chaotic patterns can be greatly influenced by the values of and . This indicates that the anharmonicity-induced nonlinear effects are greatly responsible for the emergence of nonlinear resonances and chaos.
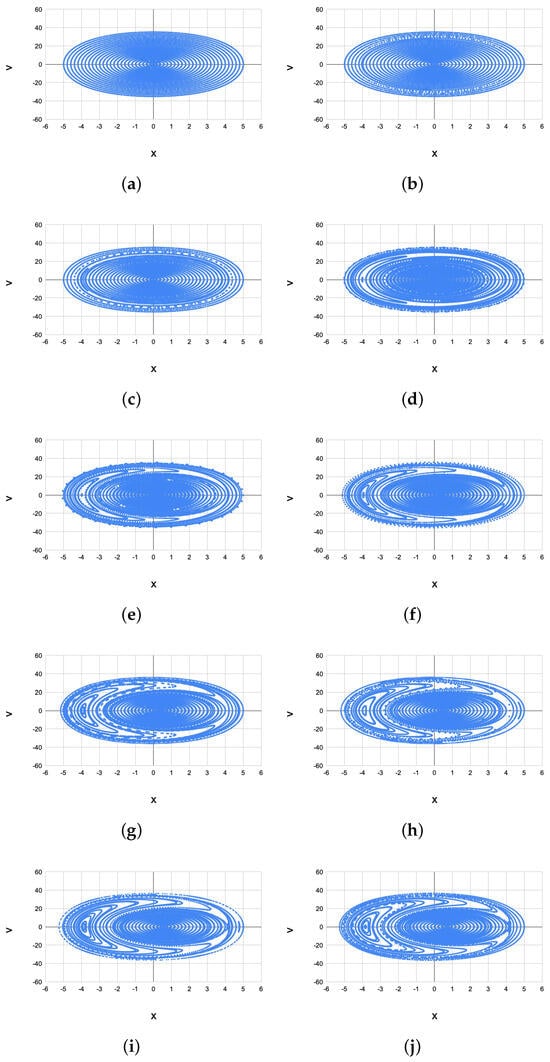
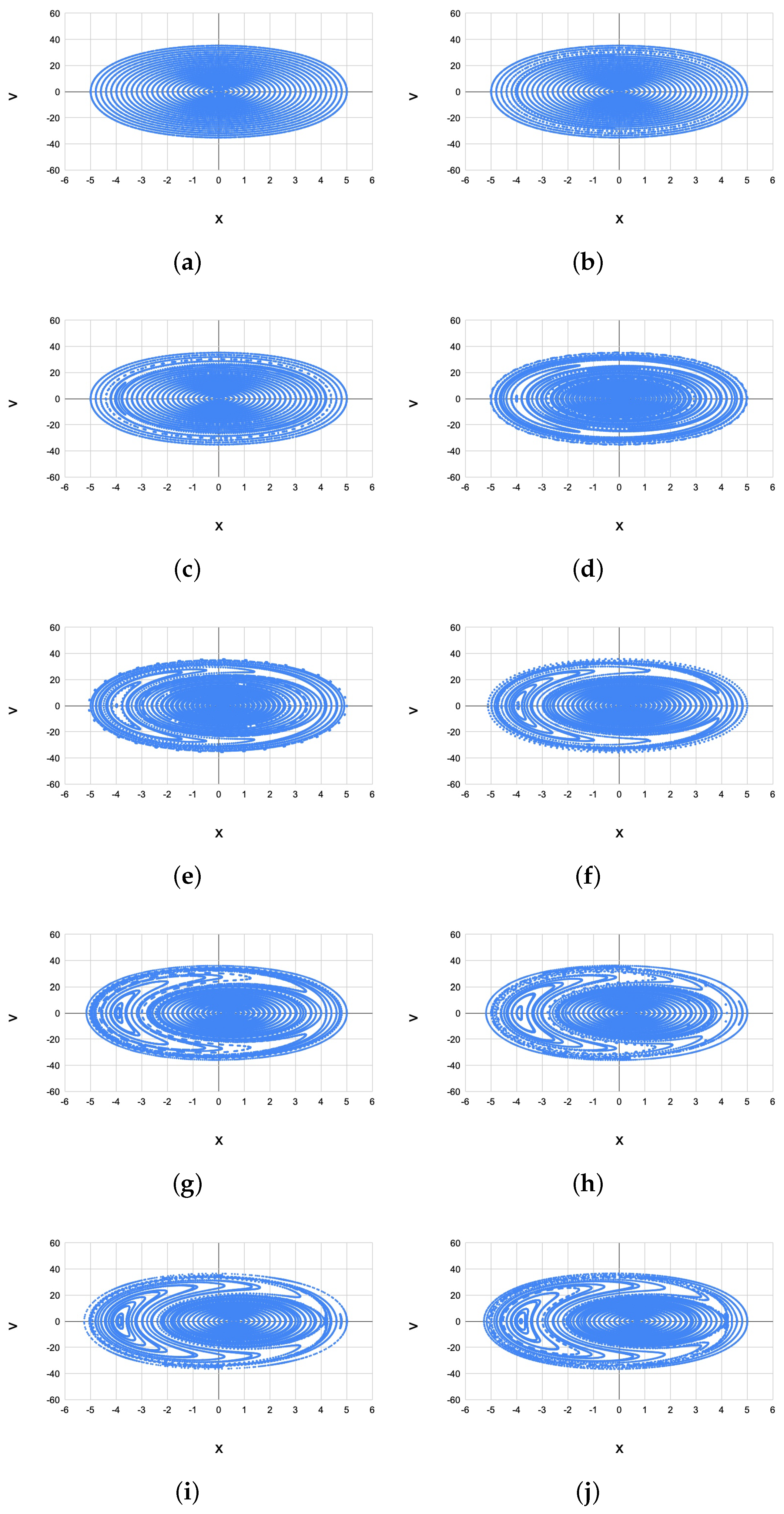
Figure 3.
Poincaré phase-space plots for the driven quartic anharmonic oscillator (see Equation (6)), with and = (a) 0.001, (b) 0.01, (c) 0.1, (d) 1, (e) 3, (f) 5, (g) 7, (h) 9, (i) 11, and (j) 13.
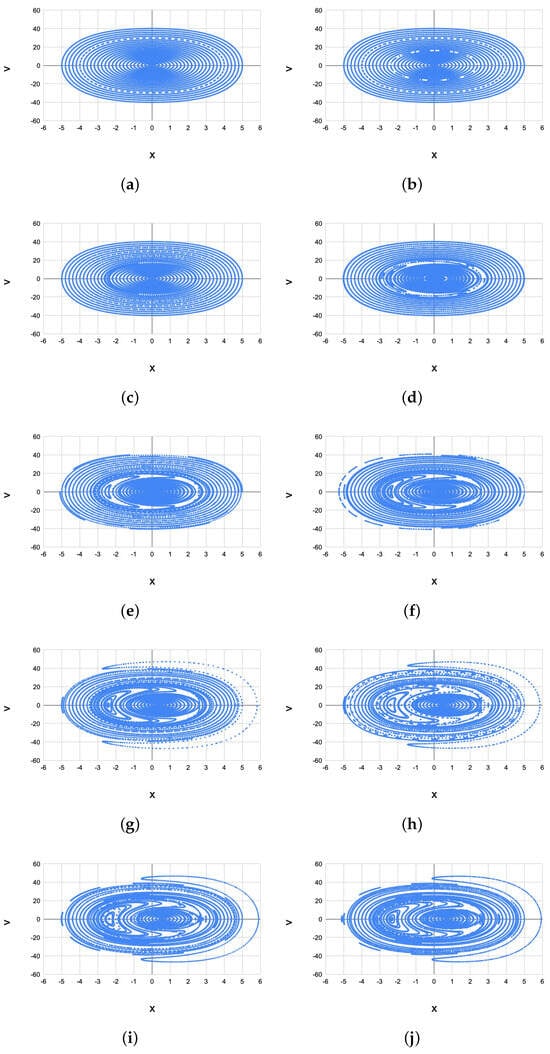
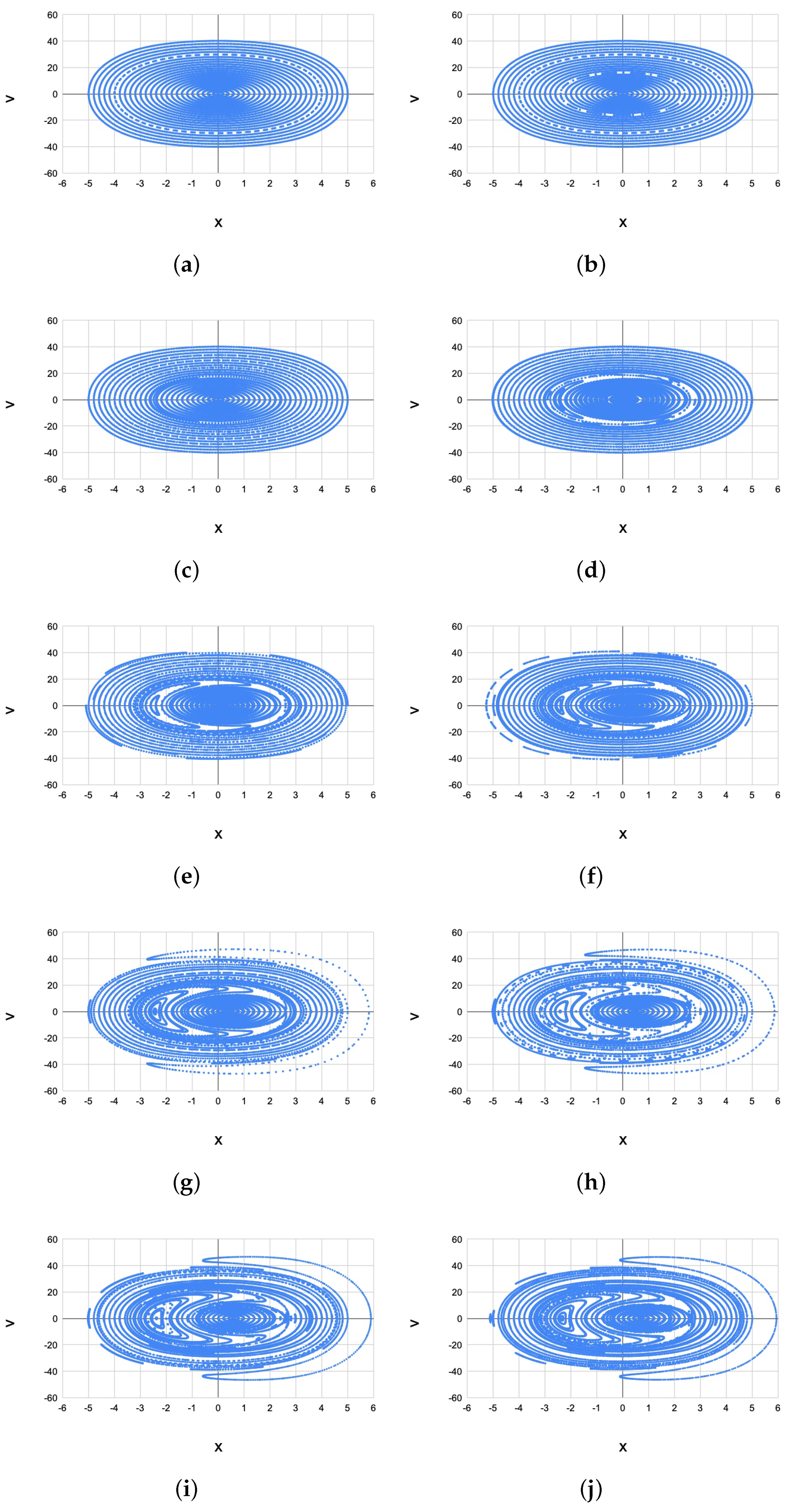
Figure 4.
Poincaré phase-space plots for the driven quartic anharmonic oscillator (see Equation (6)), with and = (a) 0.001, (b) 0.01, (c) 0.1, (d) 1, (e) 3, (f) 5, (g) 7, (h) 9, (i) 11, and (j) 13.
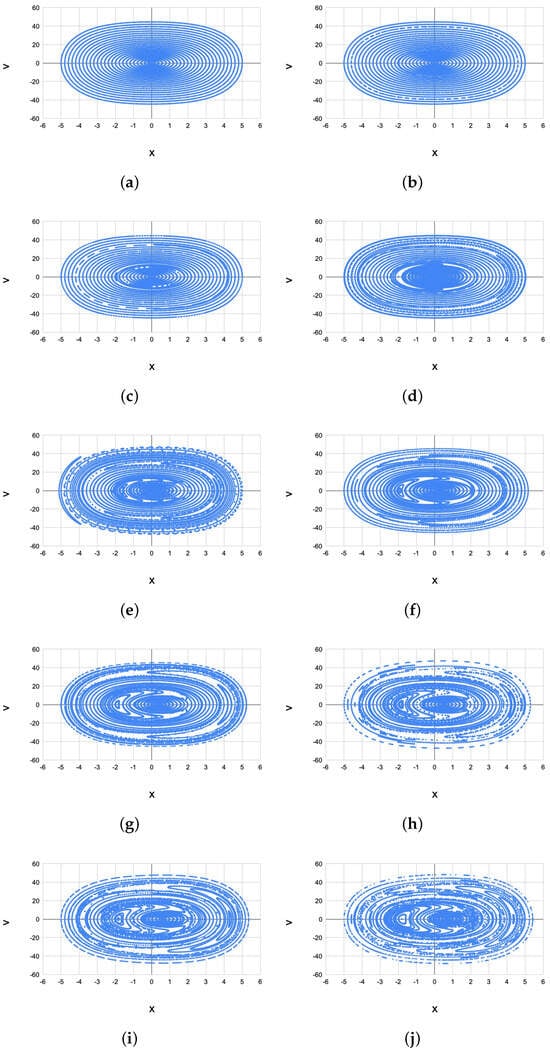
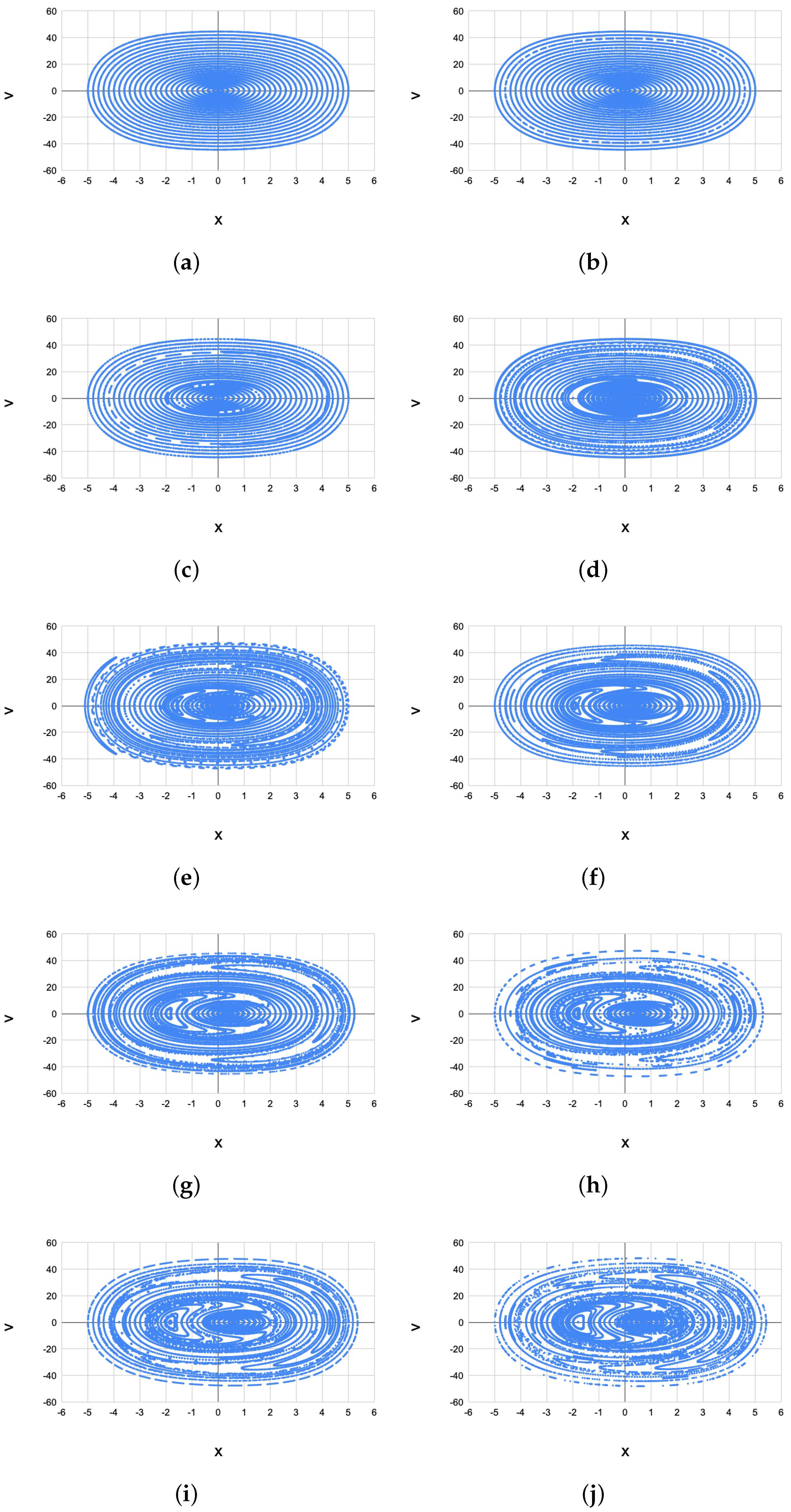
Figure 5.
Poincaré phase-space plots for the driven quartic anharmonic oscillator (see Equation (6)), with and = (a) 0.001, (b) 0.01, (c) 0.1, (d) 1, (e) 3, (f) 5, (g) 7, (h) 9, (i) 11, and (j) 13.
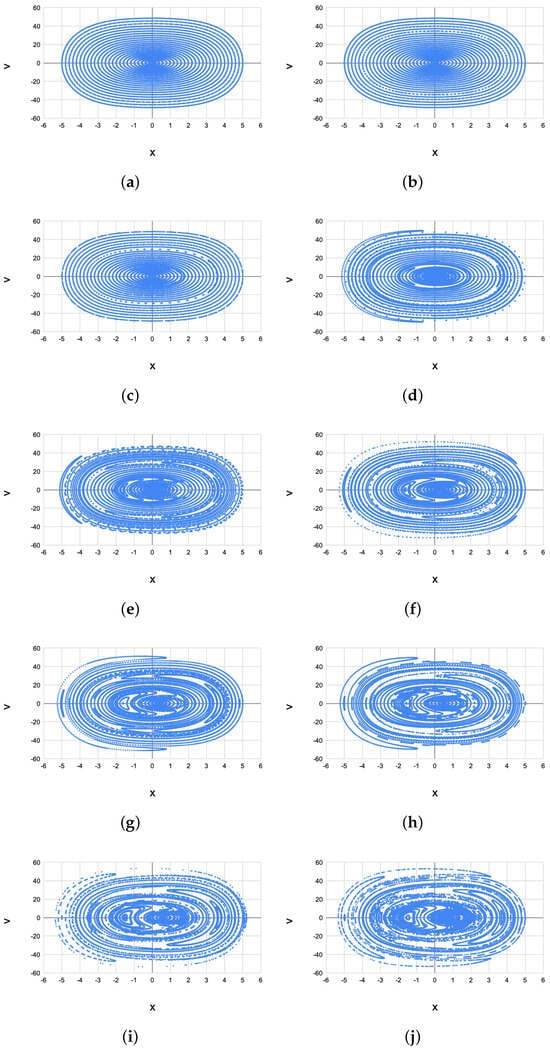
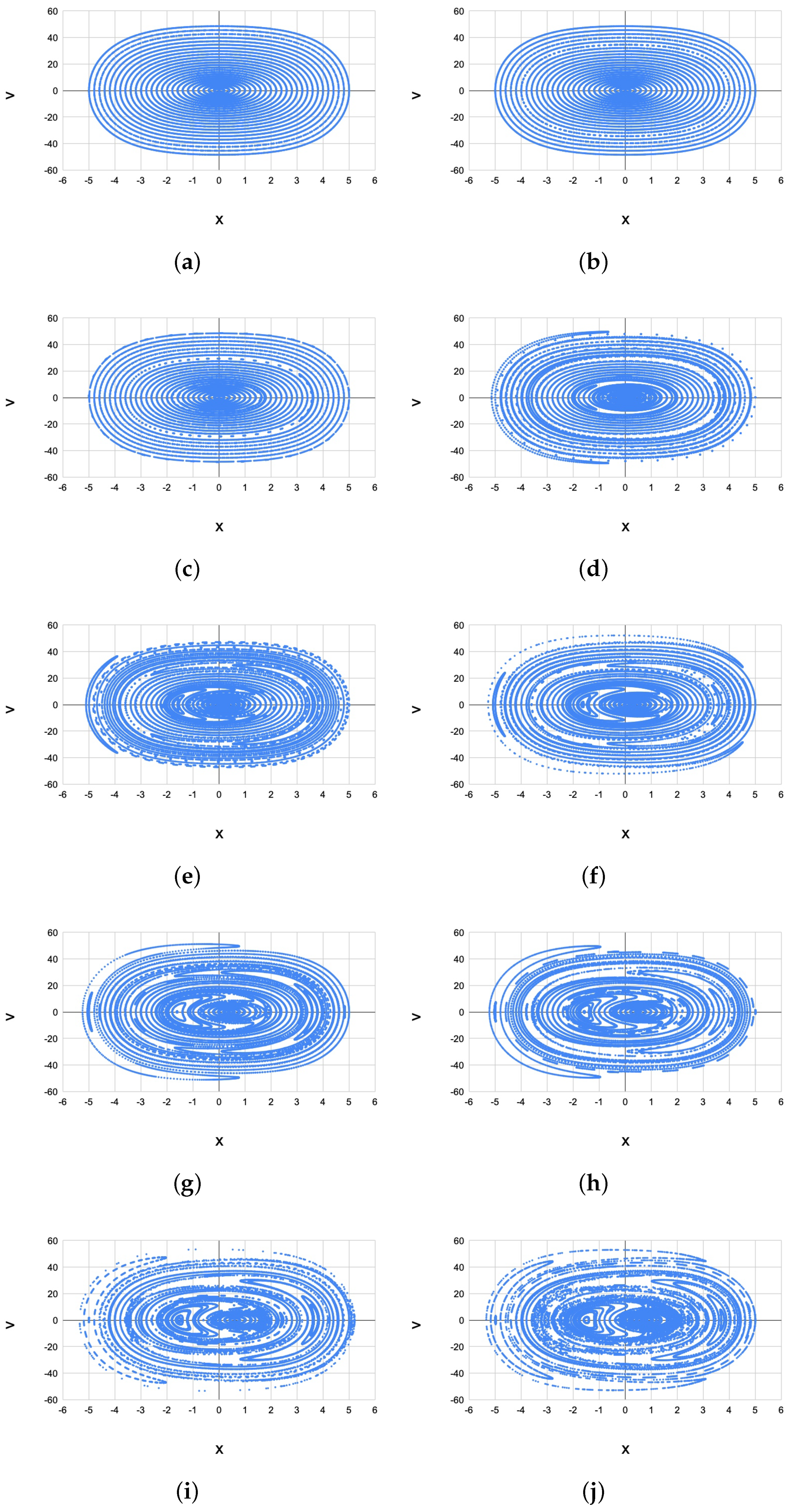
Figure 6.
Poincaré phase-space plots for the driven quartic anharmonic oscillator (see Equation (6)), with and = (a) 0.001, (b) 0.01, (c) 0.1, (d) 1, (e) 3, (f) 5, (g) 7, (h) 9, (i) 11, and (j) 13.
For each , when is sufficiently small (e.g., ), the perturbations related to nonlinear resonances are very weak, and hence, the motion of the oscillator remains regular, periodic, and stable (i.e., similar to the undriven case, where ). Here, the regions of regular motion are denoted as the elliptic regions. Nevertheless, as increases beyond a certain threshold (e.g., ), nonlinear-resonance regions (i.e., the falcate regions) begin to emerge in the phase space of the oscillator. Note that the elliptic and falcate regions act as separate regions of behavior, and the oscillator’s trajectory is highly dependent on which region it starts in. As further increases, nonlinear resonances become more pronounced, and a series of nonlinear resonances can be induced in different regions of phase space. With the increase in , nonlinear-resonance regions grow, and hence, neighboring resonances (e.g., the elliptic and falcate regions) can overlap. As a result, the oscillator can be affected simultaneously by the overlapping resonances. In this situation, the motion of the oscillator becomes chaotic, as the trajectory of motion can cross over from one resonance to another in an apparently random fashion. In other words, the overlapping resonances can destabilize the nearby trajectories, leading to chaotic behavior [7]. The aforementioned mechanism for the emergence of classical chaos has been well recognized due to Chirikov [7], and has recently been re-examined in various systems [9,10]. In this study, our numerical results are also in support of the Chirikov mechanism.
For a larger , the anharmonicity-induced nonlinear effects become more significant, nonlinear resonances become more prevalent, nonlinear-resonance regions become more localized near the origin, and neighboring resonances become increasingly more overlapped, and, hence, the evolution of chaotic behavior becomes more rapid with increasing . As a consequence, for the driven quartic anharmonic oscillator with considerably large values of and , the inherent instability and sensitivity to initial conditions suggest that precise long-term predictions are impossible. For example, in the case of = 0.11 and = 13 (see Figure 6j), the chaotic sea is shown to occupy a large part of the phase space.
4. Conclusions
In conclusion, we have shown that a one-dimensional quartic anharmonic classical oscillator driven by a time-dependent external square-wave force can generate a wide variety of regular and chaotic patterns in the phase space of the oscillator.
Our main findings from this study are summarized as follows. First, the nonlinear resonances, resonance overlaps, and chaos can be greatly influenced by both the anharmonic force constant and the driving force amplitude . This suggests that the anharmonicity-induced nonlinear effects are greatly responsible for the emergence of chaos. Second, we find that for the driven quartic anharmonic oscillator (with ), as increases, there is a transition from regular dynamics to chaotic behavior. When is sufficiently small, the motion of the oscillator is regular, periodic, and stable (i.e., similar to the undriven case, where ). However, as further increases, we observe the formation, growth, overlap, and ultimate disappearance of nonlinear resonances due to the emergence of chaos [7]. Third, for a larger , the evolution of chaotic behavior becomes more rapid. Therefore, the inherent instability and sensitivity to initial conditions suggest that accurate long-term predictions are not possible for the driven quartic anharmonic oscillator with considerably large values of and .
The complex relationship between the system parameters (e.g., and ) and chaotic behavior warrants further exploration. For example, the effect of damping and different kinds of driving forces (e.g., triangle waves and sawtooth waves) in affecting chaotic patterns can also be investigated in a future study. In addition, the role of higher-order (e.g., , , and ) terms in the Taylor series expansion of a potential energy function in generating chaotic patterns could also be explored. In addition, the quantum-mechanical analog of this classical oscillator may also be interesting for future investigation.
Author Contributions
Conceptualization, J.-D.C.; Data curation, Y.-H.L.; Formal analysis, Y.-H.L.; Funding acquisition, J.-D.C.; Investigation, Y.-H.L.; Methodology, Y.-H.L. and J.-D.C.; Project administration, J.-D.C.; Resources, J.-D.C.; Software, Y.-H.L.; Supervision, J.-D.C.; Validation, Y.-H.L. and J.-D.C.; Visualization, Y.-H.L.; Writing–original draft, Y.-H.L. and J.-D.C.; Writing–review and editing, J.-D.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research work was previously funded by the National Science and Technology Council of Taiwan (Grant No. NSTC113-2112-M-002-032).
Data Availability Statement
The numerical data supporting the findings of the present work are available from the authors upon appropriate request.
Acknowledgments
This research work was previously supported by the National Science and Technology Council of Taiwan, National Taiwan University, and the National Center for Theoretical Sciences of Taiwan.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Lichtenberg, A.J.; Lieberman, M.A. Regular and Stochastic Motion; Springer: New York, NY, USA, 1983. [Google Scholar]
- Guckenheimer, J.; Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields; Springer: New York, NY, USA, 1983. [Google Scholar]
- Lorenz, E.N. The Essence of Chaos; University of Washington Press: Seattle, WA, USA, 1993. [Google Scholar]
- Ott, E. Chaos in Dynamical Systems; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Bolotin, Y.; Tur, A.; Yanovsky, V. Chaos: Concepts, Control and Constructive Use; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Shen, B.-W.; Pielke, R.A., Sr.; Zeng, X.; Cui, J.; Faghih-Naini, S.; Paxson, W.; Atlas, R. Three kinds of butterfly effects within Lorenz models. Encyclopedia 2022, 2, 1250–1259. [Google Scholar] [CrossRef]
- Chirikov, B.V. A universal instability of many-dimensional oscillator systems. Phys. Rep. 1979, 52, 263–379. [Google Scholar] [CrossRef]
- Tabor, M. Chaos and Integrability in Nonlinear Dynamics: An Introduction; Wiley: New York, NY, USA, 1989. [Google Scholar]
- Ueda, Y. Survey of regular and chaotic phenomena in the forced Duffing oscillator. Chaos Solitons Fractals 1991, 1, 199–231. [Google Scholar] [CrossRef]
- Lee, S.-W.; Lee, H.-W. Chaotic one-dimensional harmonic oscillator. Phys. Rev. E 1997, 56, 5245–5250. [Google Scholar] [CrossRef]
- Lakshmanan, M.; Rajasekar, S. Nonlinear Dynamics: Integrability, Chaos and Patterns; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Mandal, S. The approximate solution of a classical quartic anharmonic oscillator with periodic force: A simple analytical approach. Commun. Nonlinear Sci. Numer. Simul. 2005, 10, 341–352. [Google Scholar] [CrossRef]
- Butikov, E.I. Square-wave excitation of a linear oscillator. Am. J. Phys. 2004, 72, 469–476. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in C: The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations; Wiley: Chichester, UK, 2008. [Google Scholar]
- Feigenbaum, M.J. Quantitative universality for a class of nonlinear transformations. J. Stat. Phys. 1978, 19, 25–52. [Google Scholar] [CrossRef]
- Saiki, Y.; Yorke, J.A. Can the flap of a butterfly’s wings shift a tornado into Texas–without chaos? Atmosphere 2023, 14, 821. [Google Scholar] [CrossRef]
- Elwakil, A.S. Nonautonomous pulse-driven chaotic oscillator based on Chua’s circuit. Microelectron. J. 2002, 33, 479–486. [Google Scholar] [CrossRef]
- Gandhimathi, V.M.; Murali, K.; Rajasekar, S. Stochastic resonance with different periodic forces in overdamped two coupled anharmonic oscillators. Chaos Solitons Fractals 2006, 30, 1034–1047. [Google Scholar] [CrossRef]
- Duffing, G. Erzwungene Schwingungen bei Veränderlicher Eigenfrequenz und Ihre Technische Bedeutung; Vieweg: Braunschweig, Germany, 1918. [Google Scholar]
- Kovacic, I.; Brennan, M.J. The Duffing Equation: Nonlinear Oscillators and their Behaviour; John Wiley & Sons, Ltd.: Chichester, UK, 2011. [Google Scholar]
- Bender, C.M.; Orszag, S.A. Advanced Mathematical Methods for Scientists and Engineers; McGraw-Hill: New York, NY, USA, 1978. [Google Scholar]
- Blanchard, P.; Devaney, R.L.; Hall, G.R. Differential Equations; Cengage Learning: Boston, MA, USA, 2012. [Google Scholar]
- Shen, B.-W. Homoclinic orbits and solitary waves within the nondissipative Lorenz model and KdV equation. Int. J. Bifurc. Chaos 2020, 30, 2050257. [Google Scholar] [CrossRef]
- Whittaker, E.T.; Watson, G.N. Modern Analysis; Cambridge University Press: Cambridge, UK, 1947. [Google Scholar]
- Hsu, C.S. On the application of elliptic functions in non-linear forced oscillations. Q. Appl. Math. 1960, 17, 393–407. [Google Scholar] [CrossRef]
- Coddington, E.A.; Levinson, N. Theory of Ordinary Differential Equations; McGraw-Hill: New York, NY, USA, 1955. [Google Scholar]
- Strogatz, S.H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering; Westview Press: Boulder, CO, USA, 2014. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).