
Optimizing Sensor-Controlled Systems with Minimal Intervention: A Fuzzy Relational Calculus Approach


Abstract
1. Introduction
- An array of manageable control units.
- A set of sensors providing information about the environment.
- An expert knowledge module defining how the control units can change the environment.

2. Sensor-Controlled Systems Examples
2.1. Smart Home Systems
2.2. Automated Industrial Manufacturing Line
2.3. Precision Agriculture Systems
2.4. Health-Monitoring Systems
3. Fuzzy Linear Systems of Equations (FLSEs)
4. Direct and Inverse Problems
4.1. Direct Problem Resolution
4.2. Inverse Problem Resolution
4.3. Solutions of the Inverse Problem for (5)
5. Adjusting the Sensor-Controlled System’s Behavior with Minimal Intervention
| Algorithm 1 Change system status with minimal intervention. |
|
5.1. Step 2: Detect Current System Status
5.2. Step 3: Solve the Inverse Problem
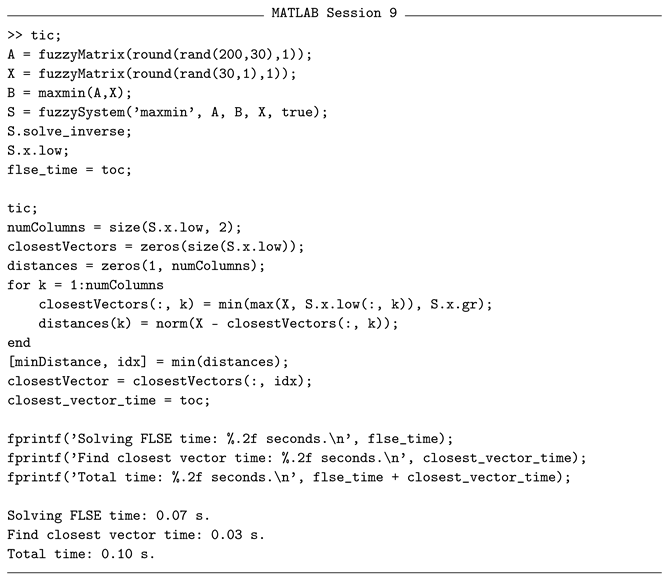
5.3. Step 6: Find the Closest Solution to the Current State
| Algorithm 2 Find the closest solution |
|
6. Examples and MATLAB Execution
6.1. Algorithm 1, Step 1—Initialize FMs

6.2. Algorithm 1, Step 2—Predict the Environment Status

6.3. Algorithm 1, Step 3—Define New Target System Status

6.4. Algorithm 1, Step 4—Solve the Inverse Problem
- The composition of the FLSE—in our case this will be .
- The matrix A.
- The matrix B.
- The matrix X—this is what we will try to find, so we can pass an empty array here.
- A Boolean parameter to flag if we need to find the complete solution set, or just the greatest solution.

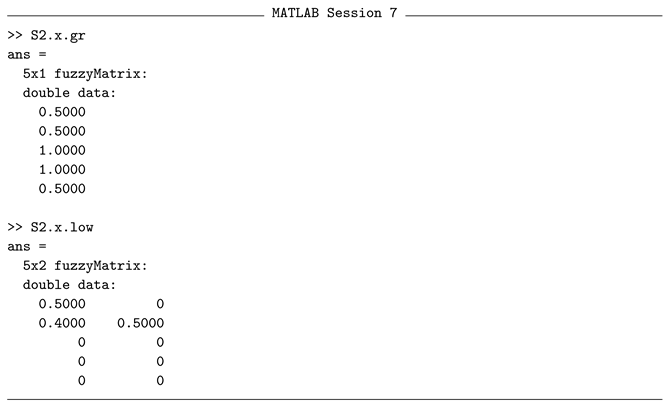
6.5. Algorithm 1, Step 5—Obtain Solutions


6.6. Algorithm 1, Step 6—Check for Consistency
6.7. Algorithm 1, Step 7—Find the New Control Units Settings

6.8. Algorithm Step 8

7. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FLSEs | fuzzy linear systems of equations |
| FM | fuzzy matrix |
References
- De Baets, B. Analytical solution methods for fuzzy relational equations. In Fundamentals of Fuzzy Sets; The Handbooks of Fuzzy Sets, Series; Dubois, D., Prade, H., Eds.; Kluwer Academic Publishers: Amsterdam, The Netherlands, 2000; Volume 1, pp. 291–340. [Google Scholar]
- Di Nola, A.; Pedrycz, W.; Sessa, S.; Sanchez, E. Fuzzy Relation Equations and Their Application to Knowledge Engineering; Kluwer Academic Press: Dordrecht, The Netherlands, 1989. [Google Scholar]
- Peeva, K.; Kyosev, Y. Fuzzy Relational Calculus-Theory, Applications and Software (with CD-ROM). In Advances in Fuzzy Systems—Applications and Theory; World Scientific Publishing Company: Singapore, Singapore, 2004; Volume 22, Available online: https://www.mathworks.com/academia/books/fuzzy-relational-calculus-peeva.html (accessed on 23 May 2024).
- Baldwin, J.F. Fuzzy logic and fuzzy reasoning. In Fuzzy Reasoning and Its Applications; Mamdani, E.H., Gaines, B.R., Eds.; Academic Press: London, UK, 1981. [Google Scholar]
- Esragh, F.; Mamdani, E.H. A general approach to linguistic approximation. In Fuzzy Reasoning and Its Applications; Mamdani, E.H., Gaines, B.R., Eds.; Academic Press: London, UK, 1981. [Google Scholar]
- Jang, J.-S.R.; Gulley, N. The Fuzzy Logic Toolbox for Use with MATLAB; MathWorks Inc.: Natick, MA, USA, 1995. [Google Scholar]
- Mamdani, E.H.; Assilian, S. An experiment in linguist synthesis with fuzzy logic controller. Int. J. Man–Mach. Stud. 1975, 7, 1–13. [Google Scholar] [CrossRef]
- Siler, W.; Buckley, J.J. Fuzzy Expert Systems and Fuzzy Reasoning; Wiley InterScience: Hoboken, NJ, USA, 2004. [Google Scholar]
- Yager, R.R.; Zadeh, L.A. An Introduction to Fuzzy Logic Applications in Intelligent Systems; Kluwer Academic Publishers: Amsterdam, The Netherlands, 1991. [Google Scholar]
- Zadeh, L.A. Making computers think like people. IEEE Spectr. 1984, 21, 26–32. [Google Scholar] [CrossRef]
- Zahariev, Z. Fuzzy reasoning through fuzzy linear systems of equations. In Proceedings of the Technical University—Sofia; Book 3. The Technical University of Sofia Publishing House: Sofia, Bulgaria, 2010; Volume 60, pp. 58–66, ISSN 1311-0829. [Google Scholar]
- Kocken, H.G.; Albayrak, I. A Short Review on Fuzzy System of Linear Equations Applications. In Handbook of Research on Transdisciplinary Knowledge Generation; IGI Global: Hershey, PA, USA, 2019; pp. 75–87. [Google Scholar] [CrossRef]
- Aviso, K.B.; Tan, R.R.; Culaba, A.B.; Cruz, J.B., Jr. Fuzzy input–output model for optimizing eco-industrial supply chains under water footprint constraints. J. Clean. Prod. 2011, 19, 187–196. [Google Scholar] [CrossRef]
- Rahgooy, T.; Yazdi, H.S.; Monsefi, R. Fuzzy Complex System of Linear Equations Applied to Circuit Analysis. Int. J. Comput. Electr. Eng. 2009, 1, 535–541. [Google Scholar] [CrossRef]
- Jin, Y. Advanced Fuzzy Systems Design and Applications; Physica-Verlag Heidelberg: Heidelberg, Germany, 2002. [Google Scholar]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems, 13th ed.; Pearson Education: London, UK, 2016. [Google Scholar]
- Meijer, G.C.M. Smart Sensor Systems; John Wiley and Sons Ltd.: Hoboken, NJ, USA, 2008. [Google Scholar]
- Merhav, S. Aerospace Sensor Systems and Applications; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Bolton, W. Instrumentation and Control Systems, 3rd ed.; Newnes: Oxford, UK, 2021. [Google Scholar]
- De Silva, C.W. Sensors and Actuators: Control System Instrumentation; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Soloman, S. Sensors and Control Systems in Manufacturing; McGraw-Hill, Inc.: New York, NY, USA, 1994. [Google Scholar]
- Meijer, G.; Makinwa, K.; Pertijs, M. (Eds.) Smart Sensor Systems: Emerging Technologies and Applications; John Wiley and Sons Ltd.: Hoboken, NJ, USA, 2014. [Google Scholar]
- Pal, V.C.; Ganguli, S.; Tripathi, S.L. (Eds.) Industrial Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 2024. [Google Scholar]
- Sinopoli, B.; Sharp, C.; Schenato, L.; Schaffert, S.; Sastry, S.S. Distributed control applications within sensor networks. Proc. IEEE 2003, 91, 1235–1246. [Google Scholar] [CrossRef]
- Chen, W.; Chen, L.; Chen, Z.; Tu, S. A realtime dynamic traffic control system based on wireless sensor network. In Proceedings of the 2005 International Conference on Parallel Processing Workshops (ICPPW’05), Oslo, Norway, 14–17 June 2005; pp. 258–264. [Google Scholar] [CrossRef]
- Jing, C.; Shu, D.; Gu, D. Design of Streetlight Monitoring and Control System Based on Wireless Sensor Networks. In Proceedings of the 2007 2nd IEEE Conference on Industrial Electronics and Applications, Harbin, China, 23–25 May 2007; pp. 57–62. [Google Scholar] [CrossRef]
- Zhou, Y.; Yang, X.; Guo, X.; Zhou, M.; Wang, L. A Design of Greenhouse Monitoring & Control System Based on ZigBee Wireless Sensor Network. In Proceedings of the 2007 International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–25 September 2007; pp. 2563–2567. [Google Scholar] [CrossRef]
- Yang, S.-H.; Cao, Y. Networked Control Systems and Wireless Sensor Networks: Theories and Applications. Int. J. Syst. Sci. 2008, 39, 1041–1044. [Google Scholar] [CrossRef]
- Kim, Y.; Evans, R.G.; Iversen, W.M. Remote Sensing and Control of an Irrigation System Using a Distributed Wireless Sensor Network. IEEE Trans. Instrum. Meas. 2008, 57, 1379–1387. [Google Scholar] [CrossRef]
- Suh, C.; Ko, Y.-B. Design and implementation of intelligent home control systems based on active sensor networks. IEEE Trans. Consum. Electron. 2008, 54, 1177–1184. [Google Scholar] [CrossRef]
- Park, D.-H.; Park, J.-W. Wireless Sensor Network-Based Greenhouse Environment Monitoring and Automatic Control System for Dew Condensation Prevention. Sensors 2011, 11, 3640–3651. [Google Scholar] [CrossRef]
- Yedavalli, R.K.; Belapurkar, R.K. Application of wireless sensor networks to aircraft control and health management systems. J. Control Theory Appl. 2011, 9, 28–33. [Google Scholar] [CrossRef]
- Li, M.; Lin, H.-J. Design and Implementation of Smart Home Control Systems Based on Wireless Sensor Networks and Power Line Communications. IEEE Trans. Ind. Electron. 2015, 62, 4430–4442. [Google Scholar] [CrossRef]
- Lu, C.; Saifullah, A.; Li, B.; Sha, M.; Gonzalez, H.; Gunatilaka, D.; Wu, C.; Nie, L.; Chen, Y. Real-Time Wireless Sensor-Actuator Networks for Industrial Cyber-Physical Systems. Proc. IEEE 2016, 104, 1013–1024. [Google Scholar] [CrossRef]
- Mekki, M.; Abdallah, O.; Amin, M.B.M.; Eltayeb, M.; Abdalfatah, T.; Babiker, A. Greenhouse monitoring and control system based on wireless Sensor Network. In Proceedings of the 2015 International Conference on Computing, Control, Networking, Electronics and Embedded Systems Engineering (ICCNEEE), Khartoum, Sudan, 7–9 September 2015; pp. 384–387. [Google Scholar] [CrossRef]
- Khan, M.; Silva, B.N.; Han, K. A Web of Things-Based Emerging Sensor Network Architecture for Smart Control Systems. Sensors 2017, 17, 332. [Google Scholar] [CrossRef] [PubMed]
- Lakhiar, I.A.; Jianmin, G.; Syed, T.N.; Chandio, F.A.; Buttar, N.A.; Qureshi, W.A. Monitoring and Control Systems in Agriculture Using Intelligent Sensor Techniques: A Review of the Aeroponic System. J. Sens. 2018, 2018, 8672769. [Google Scholar] [CrossRef]
- Peeva, K.; Zaharieva, G.; Zahariev, Z. Resolution of max-t-norm fuzzy linear system of equations in BL-algebras. AIP Conference Proceedings 2016, 1789, 060005. [Google Scholar] [CrossRef]
- Markovskii, A. On the relation between equations with max-product composition and the covering problem. Fuzzy Sets Syst. 2005, 153, 261–273. [Google Scholar] [CrossRef]
- Peeva, K. Universal algorithm for solving fuzzy relational equations. Italian Journal of Pure and Applied Mathematics 2006, 19, 169–188. [Google Scholar]
- Peeva, K. Resolution of Fuzzy Relational Equations—Method, Algorithm and Software with Applications. Information Sciences 2013, 234, 44–63. [Google Scholar] [CrossRef]
- Ignjatović, J.; Ćirić, M.; Šešelja, B.; Tepavčević, A. Fuzzy relational inequalities and equations, fuzzy quasi-orders, closures and openings of fuzzy sets. Fuzzy Sets Syst. 2015, 260, 1–24. [Google Scholar] [CrossRef]
- Yang, S. Some Results of the Fuzzy Relation Inequalities With Addition–Min Composition. IEEE Trans. Fuzzy Syst. 2018, 26, 239–245. [Google Scholar] [CrossRef]
- Yang, X. Solutions and strong solutions of min-product fuzzy relation inequalities with application in supply chain. Fuzzy Sets Syst. 2020, 384, 54–74. [Google Scholar] [CrossRef]
- Zahariev, Z.; Zaharieva, G.; Peeva, K. Fuzzy relational equations—Min-Goguen implication. AIP Conf. Proc. 2022, 2505, 120004. [Google Scholar] [CrossRef]
- Zahariev, Z. Software for solving fuzzy relational equations in BL-algebras. AIP Conf. Proc. 2023, 2939, 030012. [Google Scholar] [CrossRef]
- Peeva, K. Finite L-Fuzzy Machines. Fuzzy Sets Syst. 2004, 141, 415–437. [Google Scholar] [CrossRef]
- Zahariev, Z. Solving max–min Relational Equations. Software and Applications. In Proceedings of the International Conference “Applications of Mathematics in Engineering and Economics (AMEE’08)”, AIP Conference Proceedings, Sozopol, Bulgaria, 8–14 June 2008; Venkov, G., Kovatcheva, R., Pasheva, V., Eds.; American Institute of Physics: Melville, NY, USA, 2008; Volume 1067, pp. 516–523. [Google Scholar]
- Zahariev, Z. Software package and API in MATLAB for working with fuzzy algebras. In Proceedings of the International Conference “Applications of Mathematics in Engineering and Economics (AMEE’09)”, AIP Conference Proceedings, Sozopol, Bulgaria, 7–12 June 2009; Venkov, G., Kovatcheva, R., Pasheva, V., Eds.; American Institute of Physics: Melville, NY, USA, 2009; Volume 1184, pp. 350–434, ISBN 978-0-7354-0750-9. [Google Scholar]
- Zahariev, Z. (Most Recent Update). 2024. Available online: https://www.mathworks.com/matlabcentral/fileexchange/27046-fuzzy-calculus-core-fc2ore (accessed on 26 May 2024).
- Sanchez, E. Resolution of composite fuzzy relation equations. Inf. Control 1976, 30, 38–48. [Google Scholar] [CrossRef]

{kind=link}
| t-Norm | Name | Expression | s-Norm | Name | Expression |
|---|---|---|---|---|---|
| minimum, Gödel t-norm | maximum, Gödel t-conorm | ||||
| Algebraic product | Probabilistic sum | ||||
| ukasiewicz t-norm | Bounded sum |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zahariev, Z. Optimizing Sensor-Controlled Systems with Minimal Intervention: A Fuzzy Relational Calculus Approach. Computation 2024, 12, 121. https://doi.org/10.3390/computation12060121
Zahariev Z. Optimizing Sensor-Controlled Systems with Minimal Intervention: A Fuzzy Relational Calculus Approach. Computation. 2024; 12(6):121. https://doi.org/10.3390/computation12060121
Chicago/Turabian StyleZahariev, Zlatko. 2024. "Optimizing Sensor-Controlled Systems with Minimal Intervention: A Fuzzy Relational Calculus Approach" Computation 12, no. 6: 121. https://doi.org/10.3390/computation12060121
APA StyleZahariev, Z. (2024). Optimizing Sensor-Controlled Systems with Minimal Intervention: A Fuzzy Relational Calculus Approach. Computation, 12(6), 121. https://doi.org/10.3390/computation12060121