
The Effect of Proportional, Proportional-Integral, and Proportional-Integral-Derivative Controllers on Improving the Performance of Torsional Vibrations on a Dynamical System



Abstract
1. Introduction
2. Mathematical Modeling
2.1. System Dynamics without Control
- and represent the polar mass moments of inertia.
- is the linear spring stiffness of the first part.
- represents the spring stiffness of the second part, which comprises the following:
- ◦
- : a linear component.
- ◦
- : nonlinear quadratic and cubic components.
- and denote the generalized excitation forces.
2.2. System Dynamics with PID Control
3. Analytical Investigations
3.1. Perturbation Analysis
3.2. Stability Analysis via Linearizing the above System
4. Results and Discussion
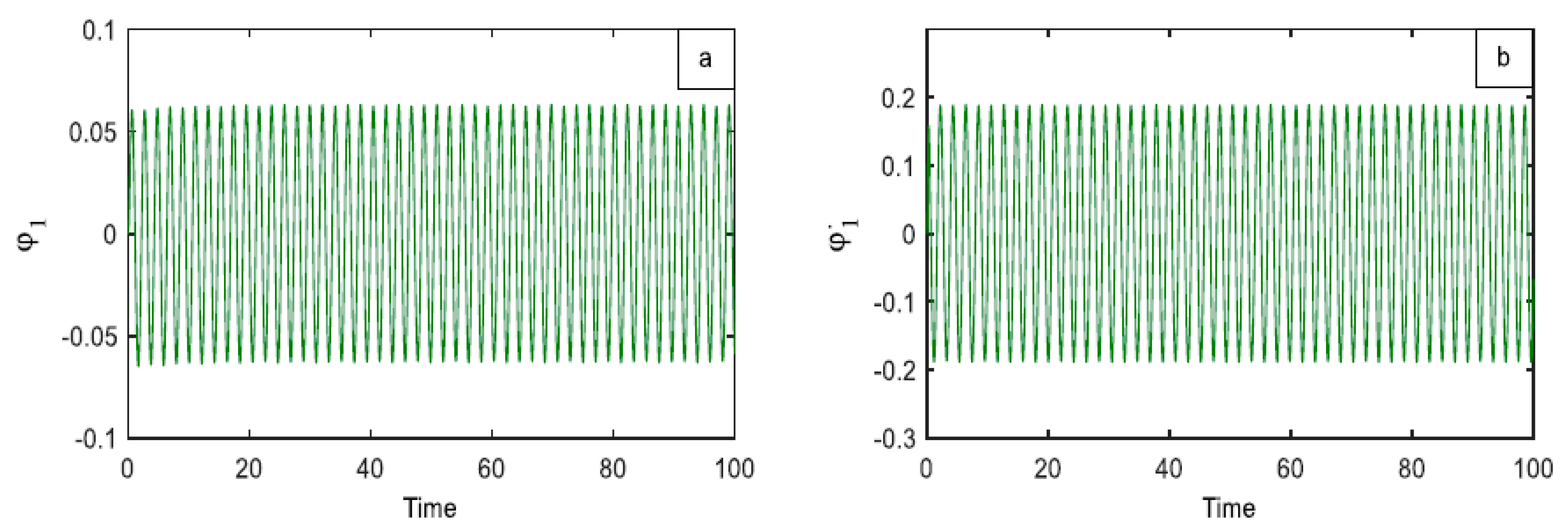
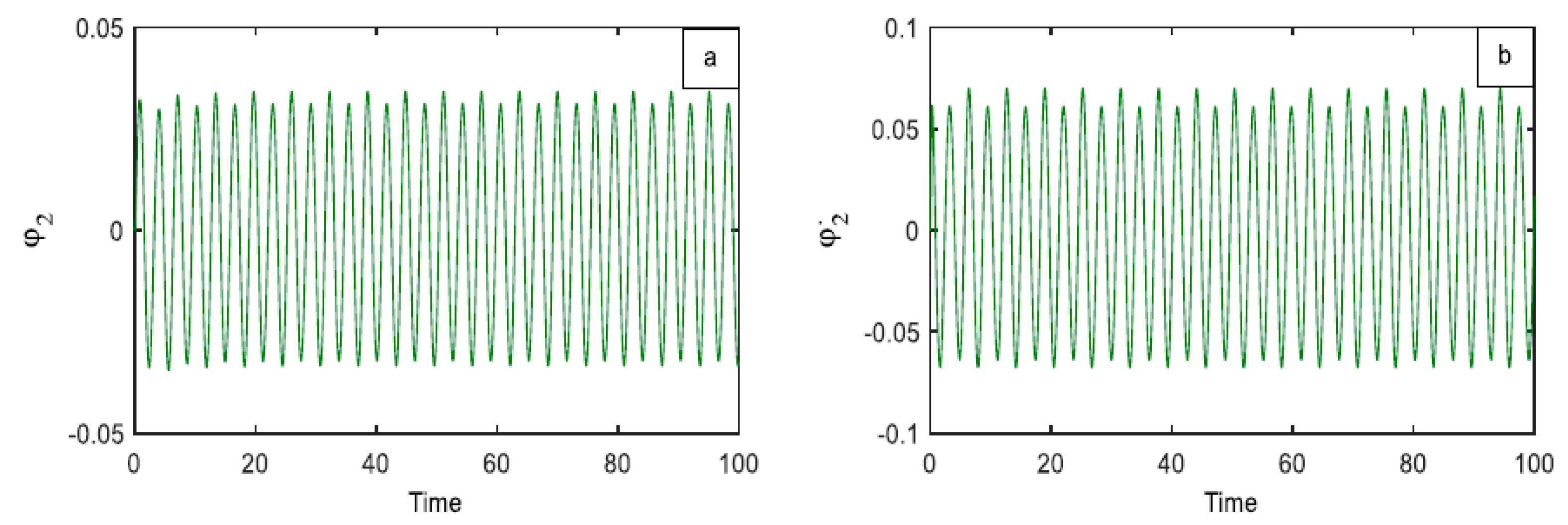
4.1. Time History Performance without Control
4.2. Time History Performance with Different Control
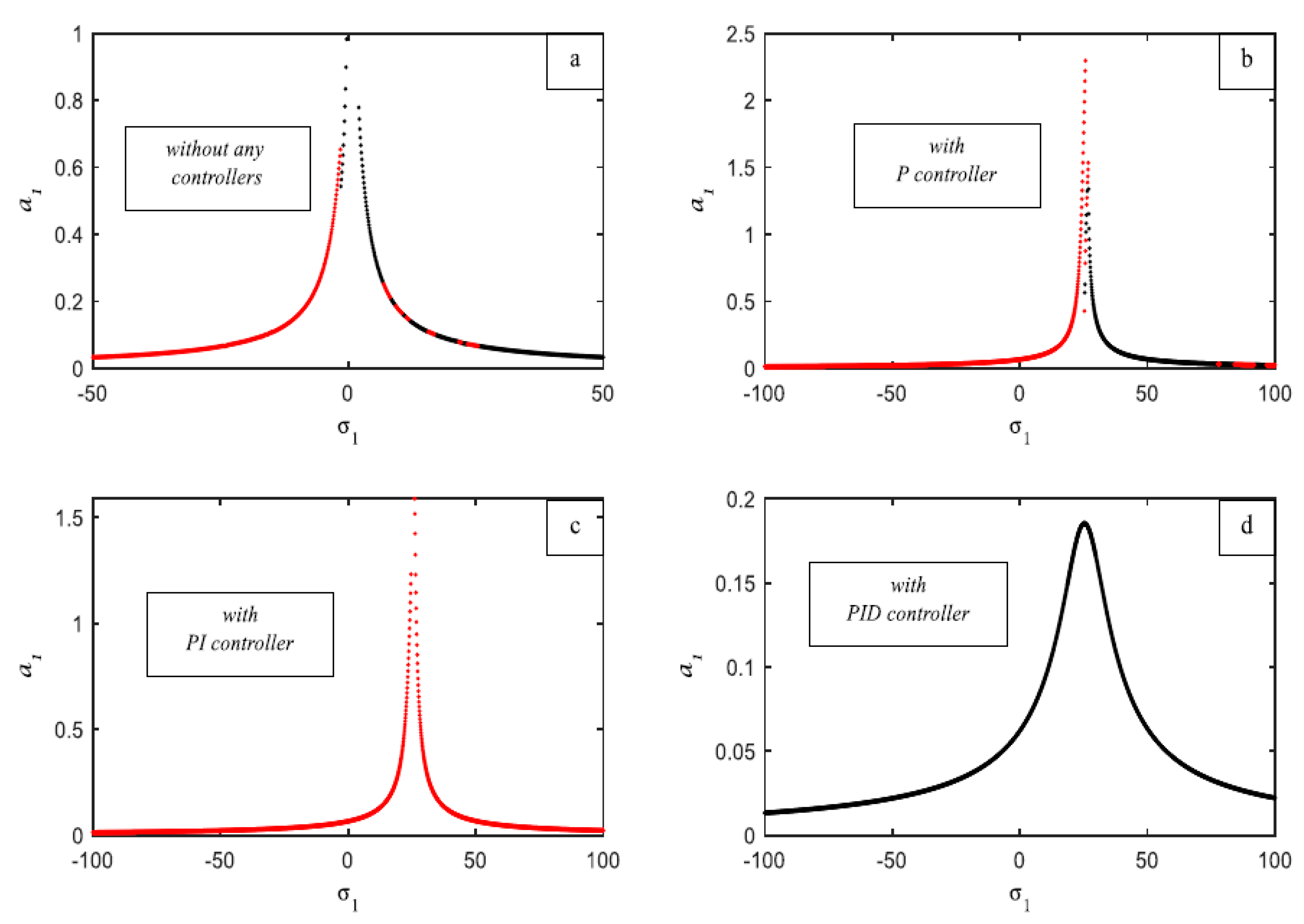
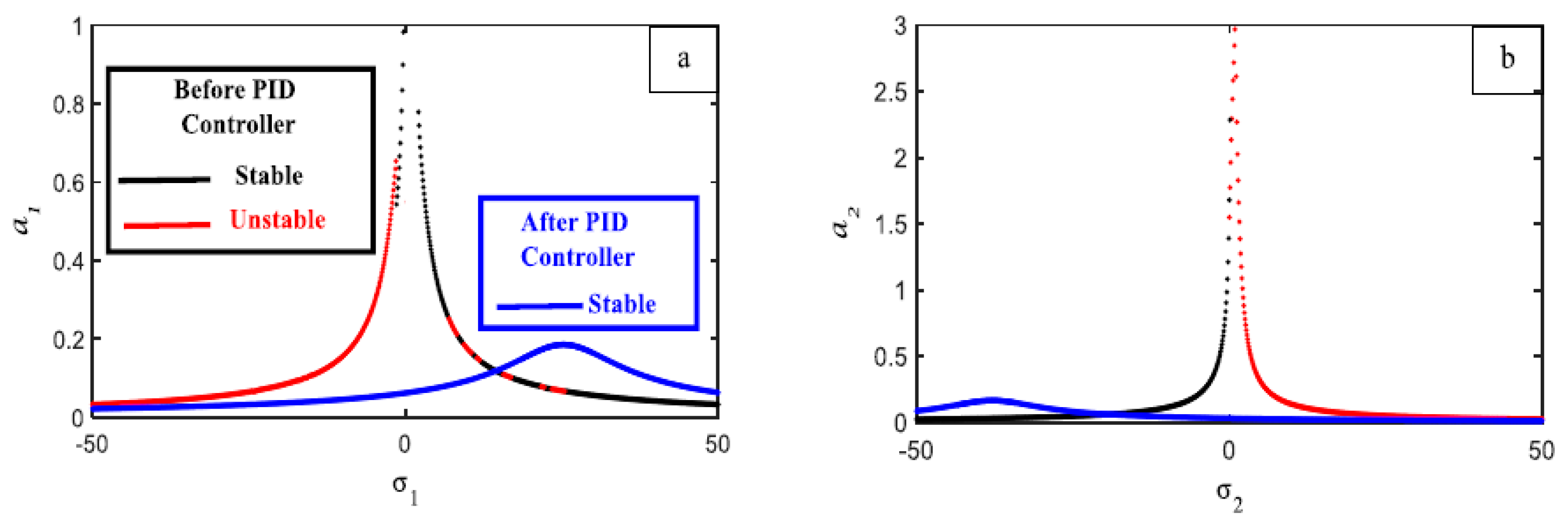
4.3. Frequency Response Curves (FRC)
5. Comparison
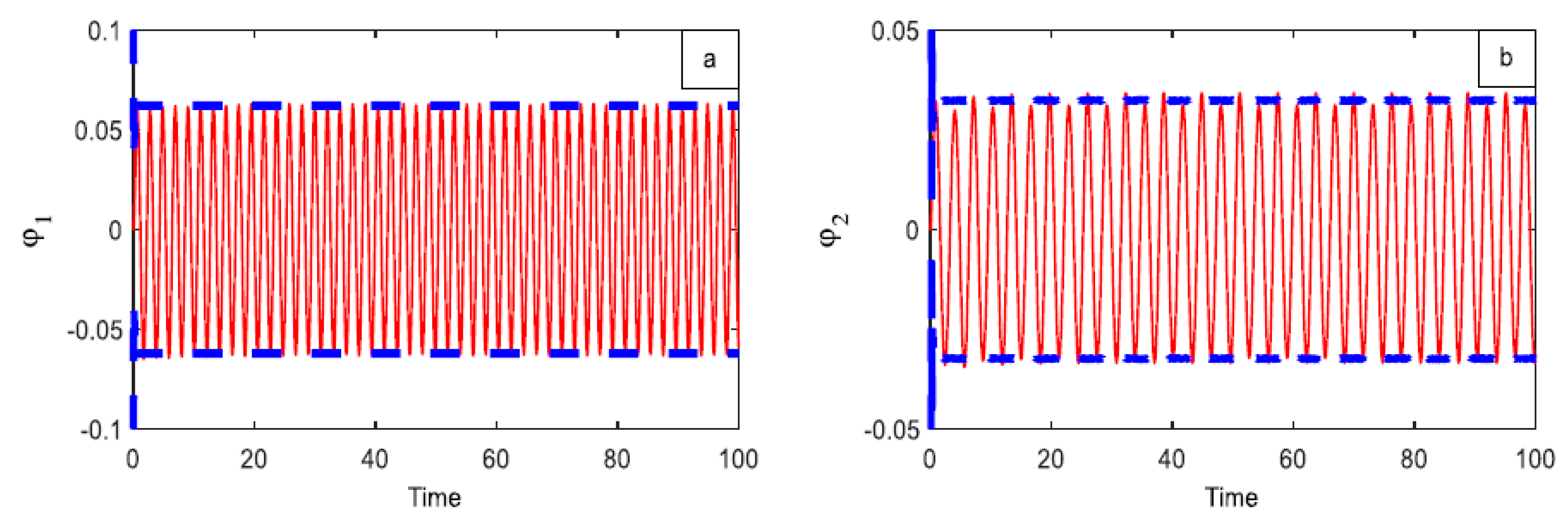
5.1. Comparison of the Perturbation’s Temporal Response Solutions with Numerical Techniques
5.2. Comparison between RK-4 and FRC
5.3. Comparison with Published Work
- (1)
- Torsional vibration was examined in a review of the literature [25] for active and passive control, which is a useful tool for managing the torsional vibration of a nonlinear dynamical system that is exposed to several parametric excitations.
- (2)
- They used the frequency response equations; the stability of the system is examined in the vicinity of the simultaneous sub-harmonic and internal resonances.
- (3)
- The behavior of the system with and without two controllers is numerically integrated and examined.
6. Conclusions
- (1)
- It is noted that the PID controller is operated to reduce the dangerous vibrations in a short time.
- (2)
- This work provided a comparison between P, PI, and PID controllers in the context of FRCs.
- (3)
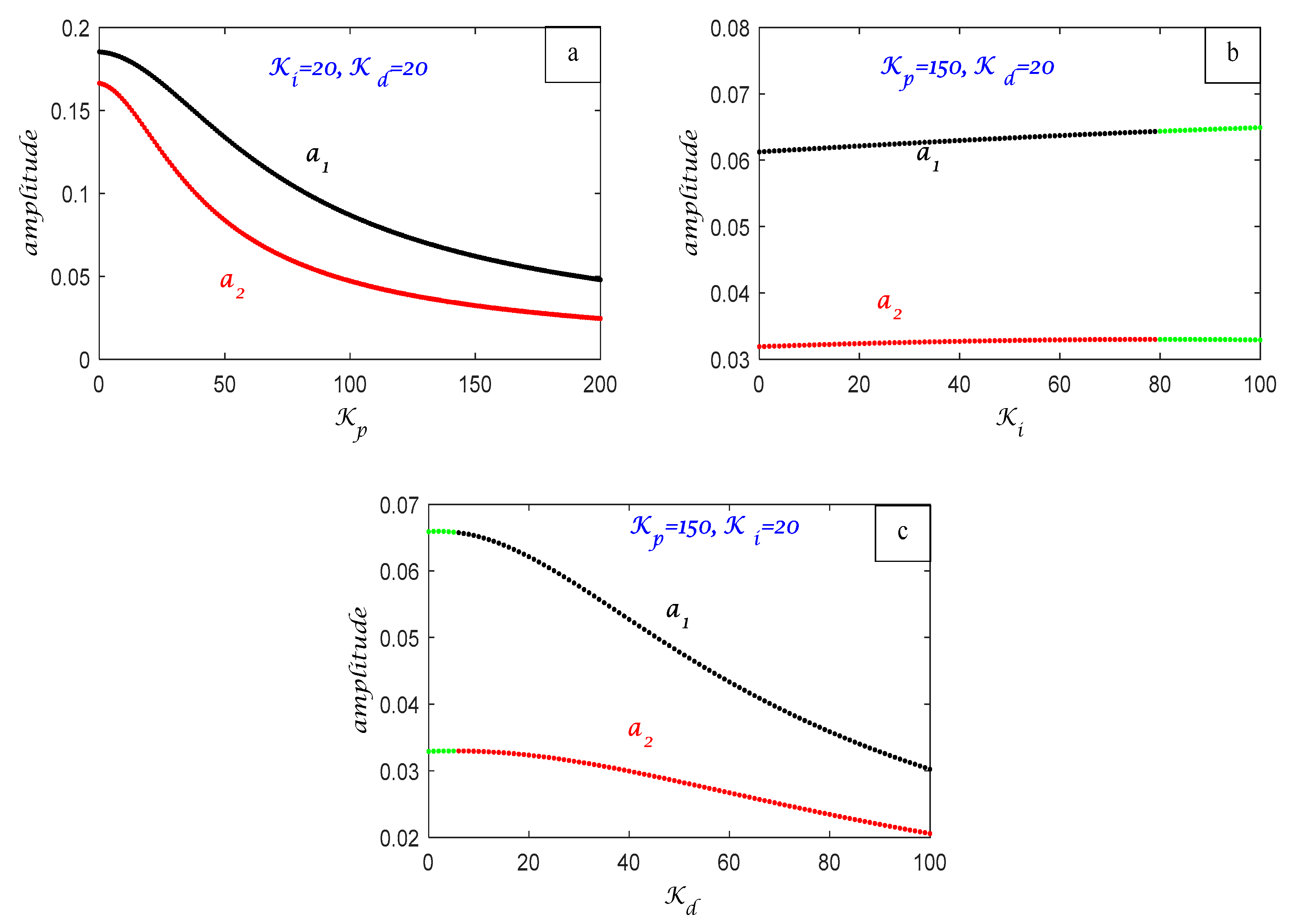
- Numerous coefficients’ effects are examined and shown numerically.
- (4)
- Despite the excitation frequency, the PID controller is the most effective control method for minimizing the vibrations in the framework.
- (5)
- The closed-loop response of relative displacement is obtained with the PID controller, which comprises the peak-overshoot.
- (6)
- The modified structure of the PID controller, such as with the P and PI controllers, is used for the control of the relative displacement of the suspension system. From the results, the PID controller provided better closed-loop performance in terms of peak overshoot and settling time, which are minimized.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Polar mass moment of the nonlinear dynamical system | |
| Linear spring stiffness of the nonlinear dynamical system | |
| Quadratic and cubic stiffness parts | |
| Excitation forces | |
| Linear damping coefficients of the nonlinear dynamical system | |
| Natural frequencies | |
| Damping coefficient | |
| Linear parameter | |
| Nonlinear parameter | |
| Forced control | |
| Proportional gain | |
| Derivative gain | |
| Integral gain | |
| Reference angle |
Appendix A
References
- Sowmya, V.S.; Dharsini, S.P.; Dharshini, R.P.; Aravind, P. Application of various PID controller tuning techniques for a temperature system. Int. J. Comput. Appl. 2014, 103, 32–34. [Google Scholar]
- Pradeepkannan, D.; Sathiyamoorthy, S. Implementation of Gain Scheduled PID Controller for a Nonlinear Coupled Spherical Tank Process. Int. J. Mech. Mechatron. Eng. 2014, 14, 93–98. [Google Scholar]
- Sabri, L.A.; Hussein, A.A. Implementation of fuzzy and PID controller to water level system using LabView. Int. J. Comput. Appl. 2015, 116, 6–10. [Google Scholar]
- Bashiri, A.H. Empirical study of robust/developed PID control for nonlinear time-delayed dynamical system in discrete time domain. Heliyon 2024, 10, e29749. [Google Scholar] [CrossRef] [PubMed]
- Hamed, A.; Shaban, E.M.; Darwish, R.R.; Abdel Ghany, A.M. Design and implementation of discrete PID control applied to Bitumen tank based on new approach of pole placement technique. Int. J. Dynam. Control 2017, 5, 604–613. [Google Scholar] [CrossRef]
- Shaban, E.M.; Hamed, A.; Darwish, R.R.; Abdel Ghany, A.M. New tuning approach of discrete PI/PID controller applied to bitumen system based on non-minimal state space formulation. In Proceedings of the 25th International Conference on Computer Theory and Applications (ICCTA), Alexandria, Egypt, 24–26 October 2015; pp. 52–57. [Google Scholar]
- Hamed, A.R.; Shaban, E.M.; Abdelhaleem, A.M. Industrial implementation of state dependent parameter PID+ control for nonlinear time delayed bitumen tank system. Iran J. Sci. Technol. Trans. Electr. Eng. 2022, 46, 743–751. [Google Scholar] [CrossRef]
- Sayed, H.; Shaban, E.M.; Abdelhamid, A. State-Dependent Parameter PID+ Control Applied to A Nonlinear Manipulator Arm. In Recent Advances in Engineering Mathematics and Physics; Farouk, M., Hassanein, M., Eds.; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Dano, M.L.; Julli’ere, B. Active control of thermally induced distortion in composite structures using macro fiber composite actuators. Smart Mater. Struct. 2007, 16, 2315–2322. [Google Scholar] [CrossRef]
- Kumar, R.S.; Ray, M.C. Active control of geometrically nonlinear vibrations of doubly curved smart sandwich shells using 1–3 piezoelectric composites. Compos. Struct. 2013, 105, 173–187. [Google Scholar] [CrossRef]
- Saeed, N.; Kamel, M. Nonlinear PD-controller to suppress the nonlinear oscillations of horizontally supported Jeffcott-rotor system. Int. Non-Linear Mech. 2016, 87, 109–124. [Google Scholar] [CrossRef]
- Fey, R.H.B.; Wouters RM, T.; Nijmeijer, H. Proportional and derivative control for steady-state vibration mitigation in a piecewise linear beam system. Nonlinear Dyn. 2010, 60, 535–649. [Google Scholar] [CrossRef]
- Eissa, M.; Kandil, A.; El-Ganaini, W.A.; Kamel, M. Analysis of a nonlinear magnetic levitation system vibrations controlled by a time-delayed proportional derivative controller. Nonlinear Dyn. 2015, 79, 1217–1233. [Google Scholar] [CrossRef]
- Eissa, M.; Kandil, A.; Kamel, M.; El-Ganaini, W.A. On controlling the response of primary and parametric resonances of a nonlinear magnetic levitation system. Meccanica 2015, 50, 233–251. [Google Scholar] [CrossRef]
- Bauomy, H.S.; EL-Sayed, A.T. Act of nonlinear proportional derivative controller for MFC laminated shell. Phys. Scr. 2020, 95, 095210. [Google Scholar] [CrossRef]
- Hote, Y.V.; Jain, S. PID controller design for load frequency control: Past, Present and future challenges. IFAC-Pap. Online 2018, 51, 604–609. [Google Scholar] [CrossRef]
- Darwish, N.M. PID controller design in the frequency domain for time-delay systems using direct method. Trans. Inst. Meas. Control 2018, 40, 940–950. [Google Scholar] [CrossRef]
- Zhao, C.; Guo, L. PID controller design for second order nonlinear uncertain systems. Sci. China Inf. Sci. 2017, 60, 022201. [Google Scholar] [CrossRef]
- Hanafi, D. PID controller design for semi-active car suspension based on model from intelligent system identification. In Proceedings of the IEEE Computer Society, Second International Conference on Computer Engineering and Applications, Bali, Indonesia, 19–21 March 2010; pp. 60–63. [Google Scholar]
- Constantin, M.; Popescu, O.S.; Mastorakis, N.E. Testing and simulation of motor vehicle suspension. Int. J. Syst. Appl. Eng. Dev. 2009, 3, 74–83. [Google Scholar]
- Kumar, M.S. Development of Active System for Automobiles using PID Controller. In Proceedings of the World Congress on Engineering, London, UK, 2–4 July 2008; Volume II. [Google Scholar]
- Govinda, K.E.; Raghul, S.; Kishore, K.R.; Mathan, K.M.; Prasanth, C. Enhancing the Closed Loop Performance of Semi-active Suspension System with I-PD Controller. Mater. Sci. Eng. 2019, 561, 012085. [Google Scholar] [CrossRef]
- Amer, Y.A.; EL-Sayed, A.T.; El-Bahrawy, F.T. Torsional vibration reduction for rolling mill’s main drive system via negative velocity feedback under parametric excitation. J. Mech. Sci. Technol. 2015, 29, 1581–1589. [Google Scholar] [CrossRef]
- Wenzhi, G.; Zhiyong, H. Active control and simulation test study on torsional vibration of large turbo-generator rotor shaft. Mech. Mach. Theory 2010, 45, 1326–1336. [Google Scholar] [CrossRef]
- El-Sayed, A.T.; Bauomy, H.S. Passive and active controllers for suppressing the torsional vibration of multiple degree-of-freedom system. J. Vib. Control 2015, 21, 2616–2632. [Google Scholar] [CrossRef]
- Jianhui, W.; Yushen, W.; Philip Chen, C.L.; Zhi, L.; Wenqiang, W. Adaptive PI event-triggered control for MIMO nonlinear systems with input delay. Inf. Sci. 2024, 677, 120817. [Google Scholar]
- Yang, W.W.; Yang, Y.J.; Tang, X.Y.; Zhang, K.R.; Li, J.C.; Xu, C. An adaptive P/PI control strategy for a solar volumetric methane/steam reforming reactor with passive thermal management. Chem. Eng. Sci. 2023, 281, 119005. [Google Scholar] [CrossRef]
- Kevorkian, J.; Cole, J.D. Multiple Scale and Singular Perturbation Methods. In Applied Mathematical Sciences; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Nayfeh, A. Perturbation Methods; Wiley: New York, NY, USA, 1973. [Google Scholar]
- Dukkipati, R.V. Solving Vibration Analysis Problems Using Matlab; New Age International Pvt Ltd Publishers: New Delhi, India, 2007. [Google Scholar]
- Bauomy, H.S.; El -Sayed, A.T. Mixed controller (IRC+ NSC) involved in the harmonic vibration response cantilever beam model. Meas. Control 2020, 53, 1954–1967. [Google Scholar] [CrossRef]
- Kamel, M.; Eissa, M.; El-sayed, A.T. Vibration reduction of a nonlinear spring pendulum under multi-parametric excitation via a longitudinal absorber. Phys. Scr. 2009, 80, 025005. [Google Scholar] [CrossRef]
- Bauomy, H.S.; El -Sayed, A.T.; Salem, A.M.; El-Bahrawy, F.T. The improved giant magnetostrictive actuator oscillations via positive position feedback damper. AIMS Math. 2023, 8, 16864–16886. [Google Scholar] [CrossRef]
- Bauomy, H.S.; El -Sayed, A.T.; El-Bahrawy, F.T.; Salem, A.M. Safety of a continuous spinning Shaft’s structure from nonlinear vibration with NIPPF. Alex. Eng. J. 2023, 67, 193–207. [Google Scholar] [CrossRef]
- Bauomy, H.S.; El -Sayed, A.T. Vibration performance of a vertical conveyor system under two simultaneous resonances. Arch. Appl. Mech. 2018, 88, 1349–1368. [Google Scholar] [CrossRef]
- El-Sayed, A.T.; Bauomy, H.S. NIPPF versus ANIPPF controller outcomes on semi- direct drive cutting transmission system in a shearer. Chaos Solitons Fractals 2022, 156, 111778. [Google Scholar] [CrossRef]
- Forming Equations of Motion for Multiple Degree-of-Freedom Systems. Available online: www.efunda.com/formulae/vibrations/mdof_eom.cfm (accessed on 1 January 2013).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Gain | |||
|---|---|---|---|---|
| P | (Red) | 150 | - | - |
| PI | (Blue) | 150 | 20 | - |
| PID | (Green) | 150 | 20 | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alluhydan, K.; EL-Sayed, A.T.; El-Bahrawy, F.T. The Effect of Proportional, Proportional-Integral, and Proportional-Integral-Derivative Controllers on Improving the Performance of Torsional Vibrations on a Dynamical System. Computation 2024, 12, 157. https://doi.org/10.3390/computation12080157
Alluhydan K, EL-Sayed AT, El-Bahrawy FT. The Effect of Proportional, Proportional-Integral, and Proportional-Integral-Derivative Controllers on Improving the Performance of Torsional Vibrations on a Dynamical System. Computation. 2024; 12(8):157. https://doi.org/10.3390/computation12080157
Chicago/Turabian StyleAlluhydan, Khalid, Ashraf Taha EL-Sayed, and Fatma Taha El-Bahrawy. 2024. "The Effect of Proportional, Proportional-Integral, and Proportional-Integral-Derivative Controllers on Improving the Performance of Torsional Vibrations on a Dynamical System" Computation 12, no. 8: 157. https://doi.org/10.3390/computation12080157
APA StyleAlluhydan, K., EL-Sayed, A. T., & El-Bahrawy, F. T. (2024). The Effect of Proportional, Proportional-Integral, and Proportional-Integral-Derivative Controllers on Improving the Performance of Torsional Vibrations on a Dynamical System. Computation, 12(8), 157. https://doi.org/10.3390/computation12080157