
1D–2D Numerical Model for Wave Attenuation by Mangroves as a Porous Structure



Abstract
:1. Introduction
2. Mathematical Model
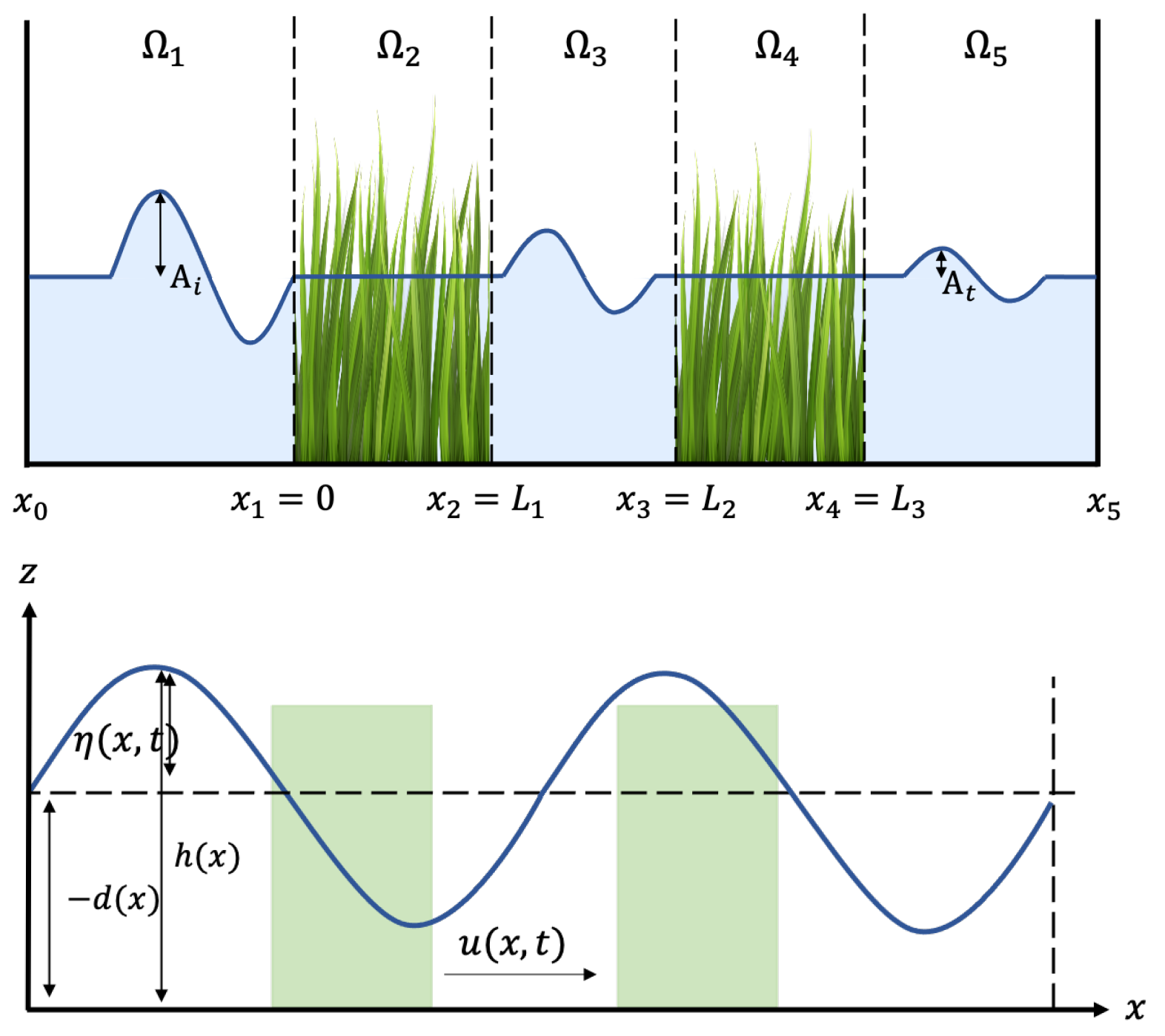
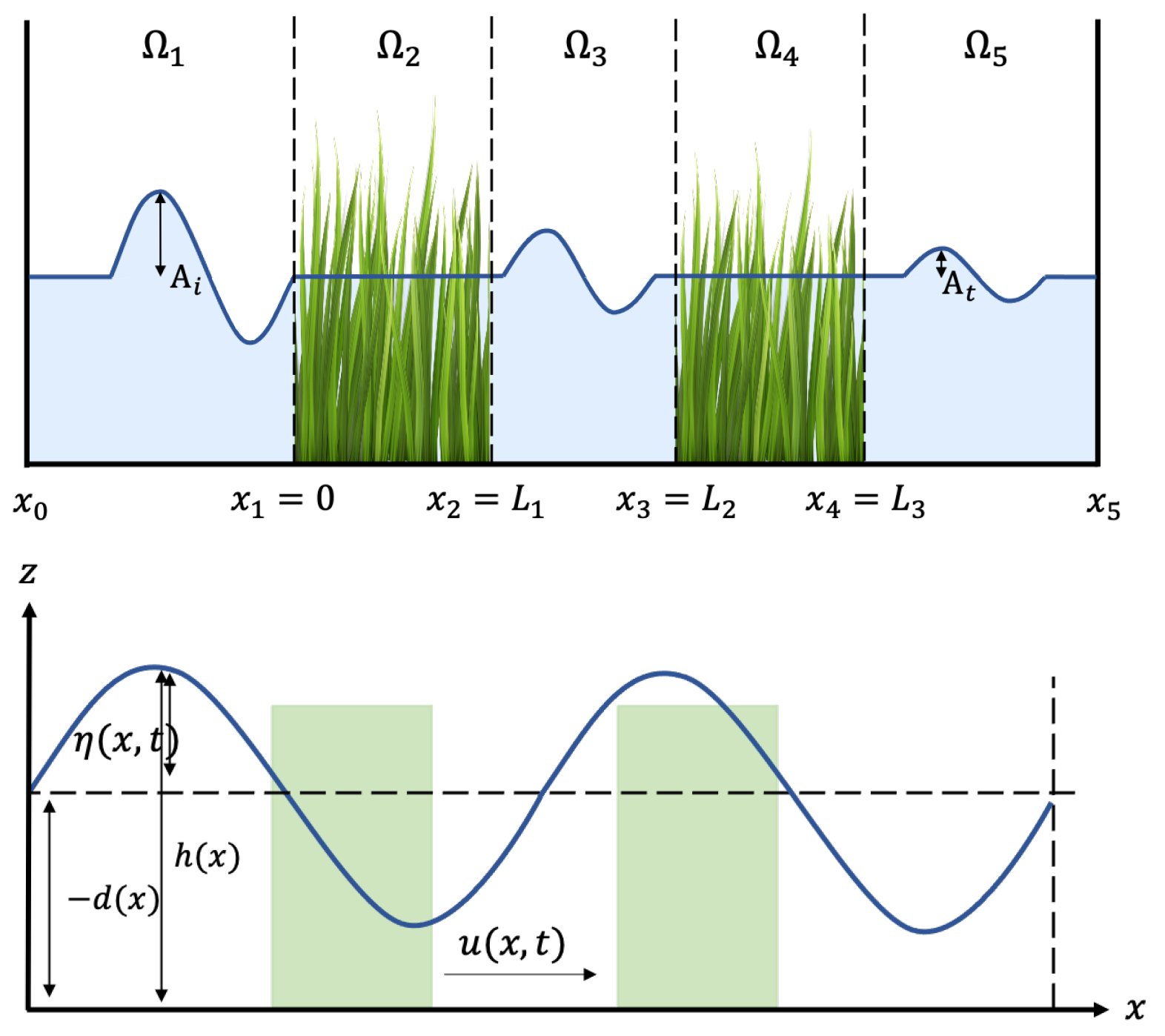
2.1. One-Dimensional (1-D) Mathematical Model
2.2. Two-Dimensional (2-D) Mathematical Model
- Friction termwith
- Diffusion termwith
3. Analytical Solution
3.1. Solution for and
3.2. Solutions for and with Friction Coefficient
3.3. Solutions for and with Diffusion Coefficient
4. Numerical Scheme
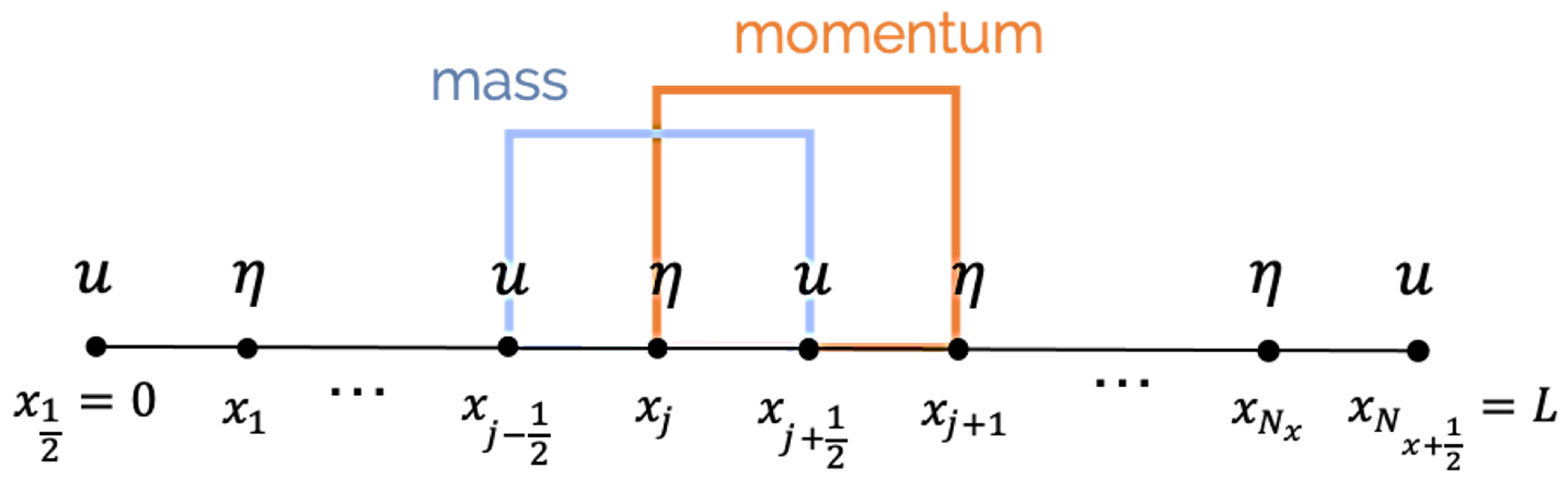
4.1. One-Dimension (1-D) Scheme
- Friction
- Diffusion
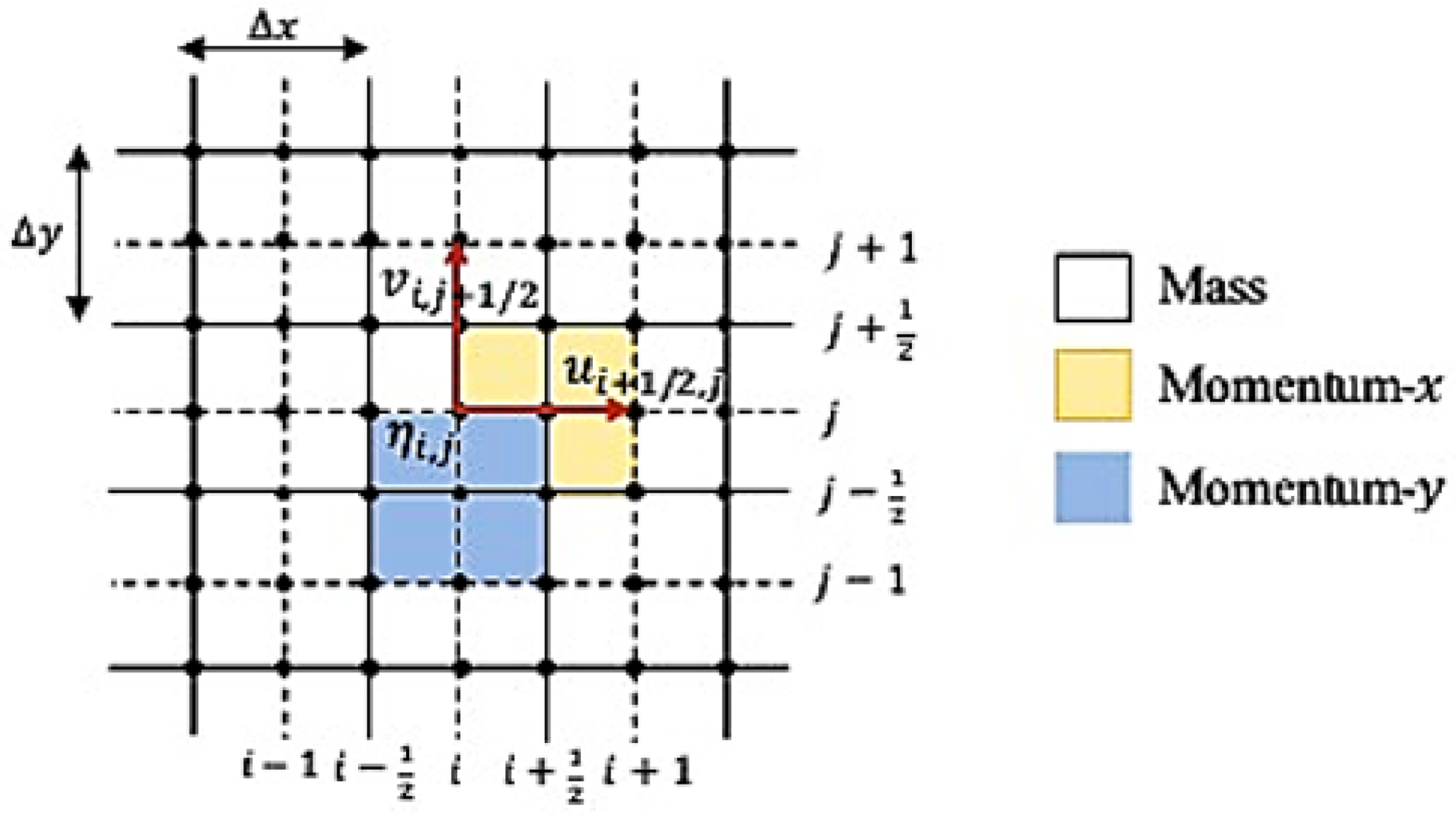
4.2. Two-Dimension (2-D) Scheme
- Friction
- Diffusion
5. Numerical Simulation and Discussion
5.1. One-Dimension (1-D) Numerical Simulations
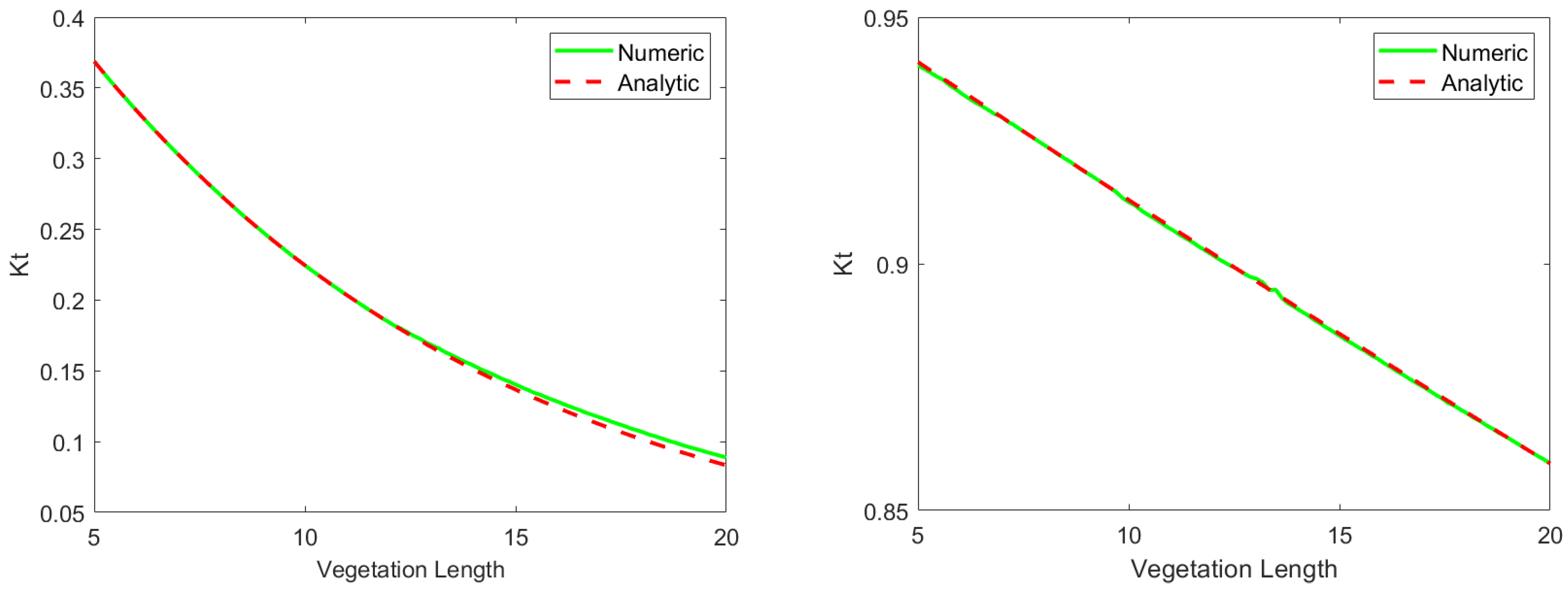
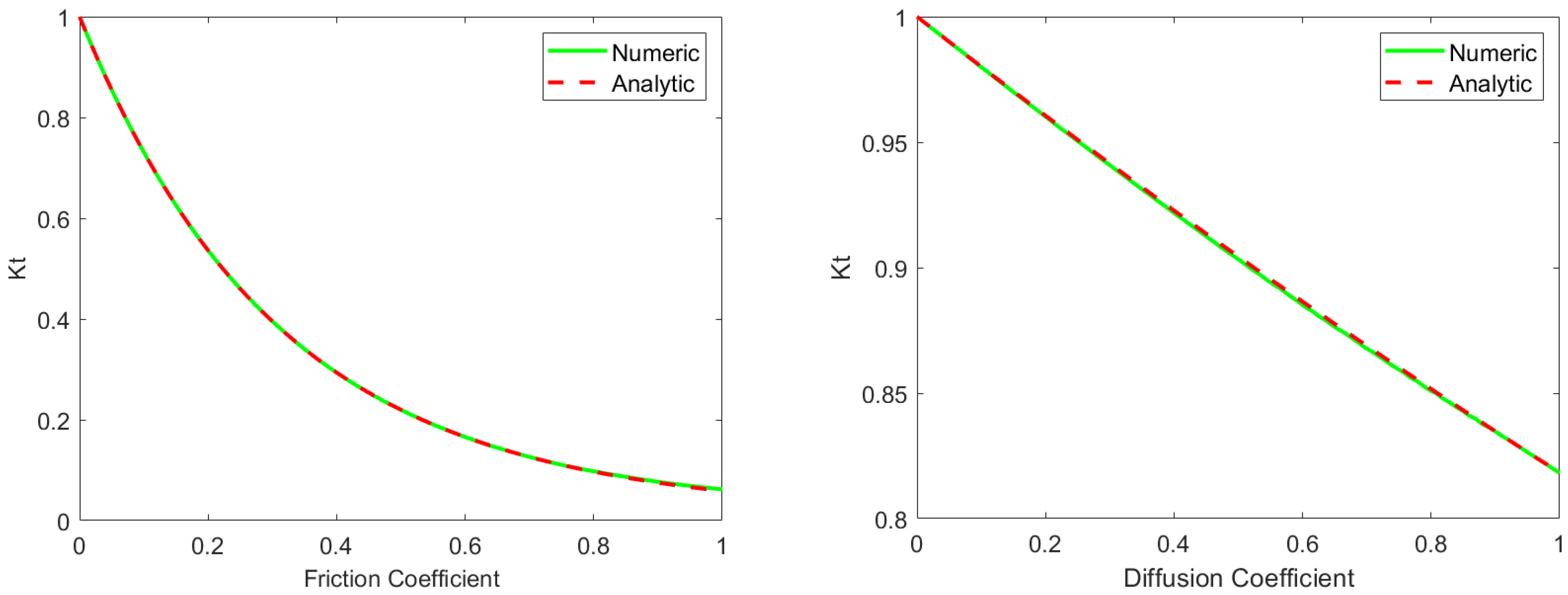
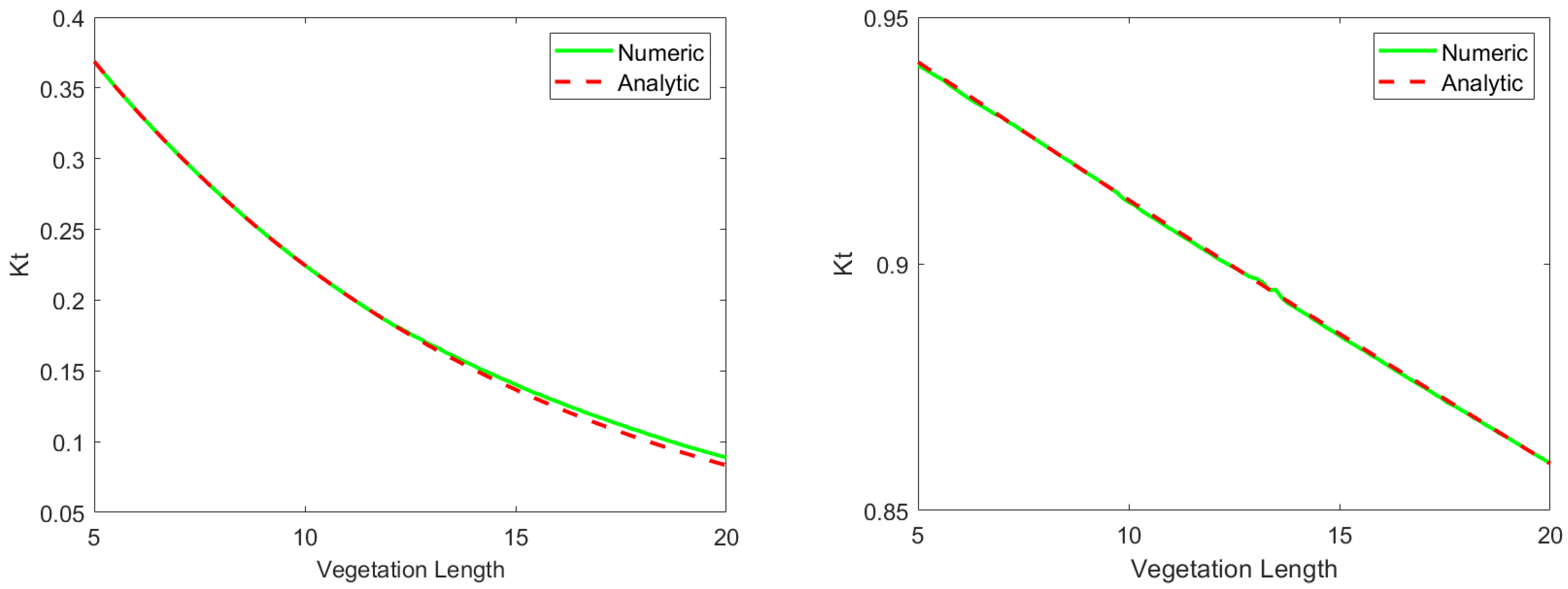
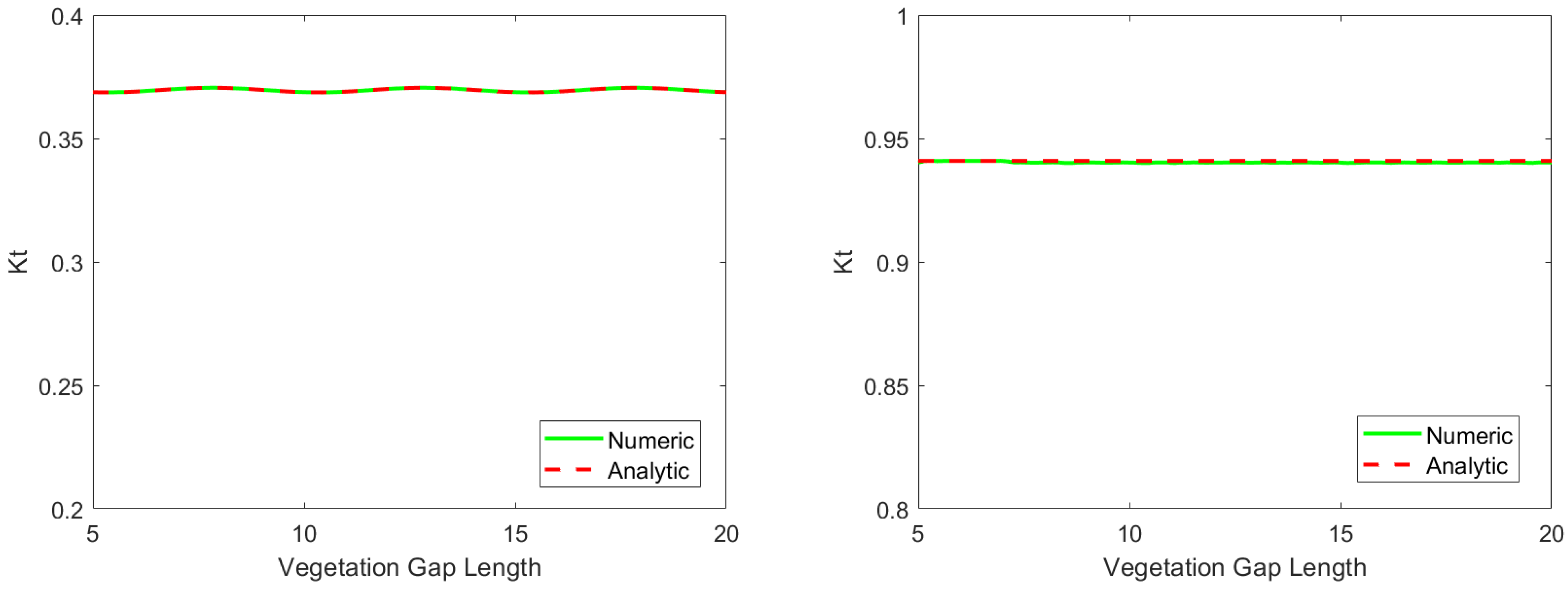
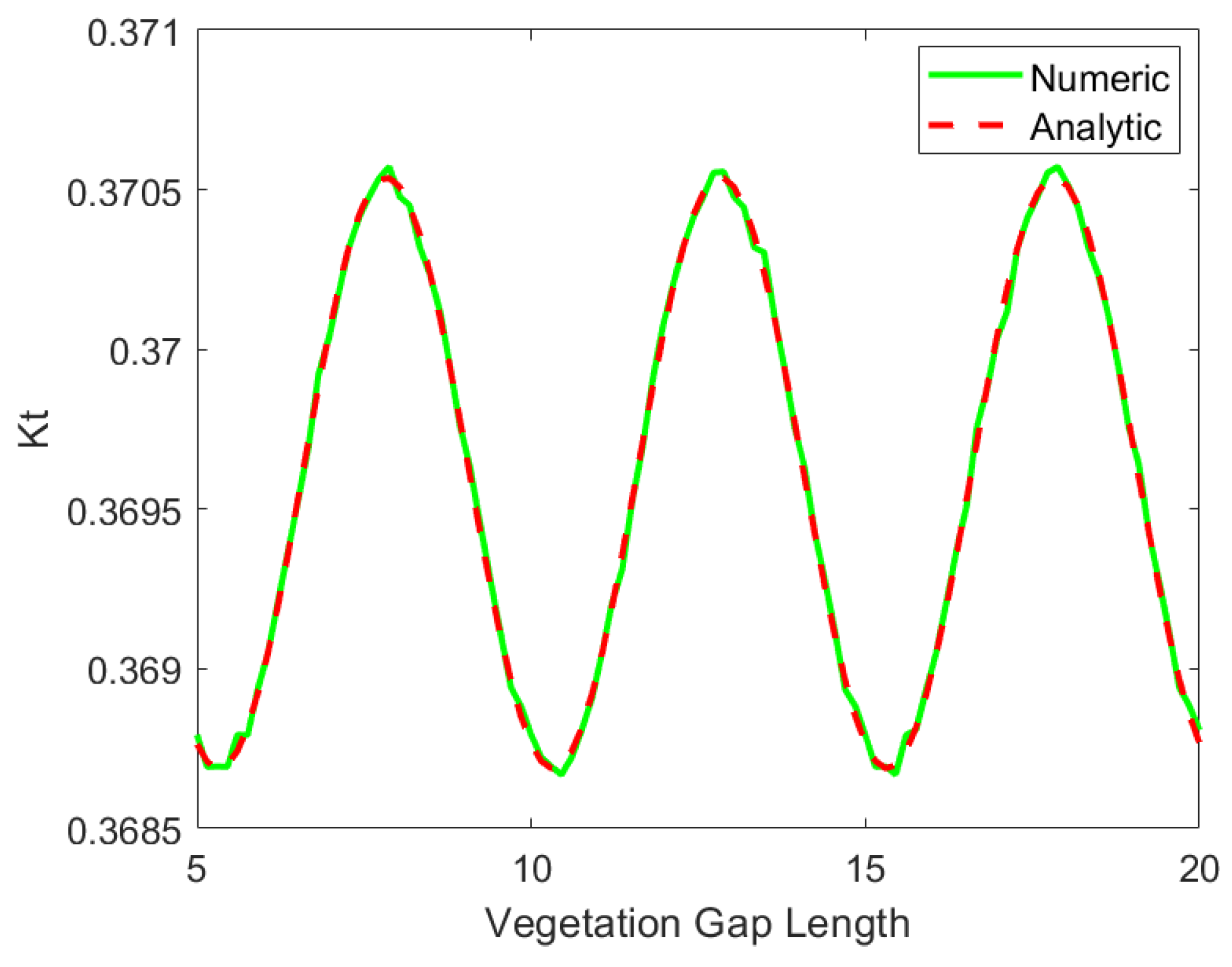
5.2. Comparing the One-Dimensional (1-D) Numerical and Analytical Result
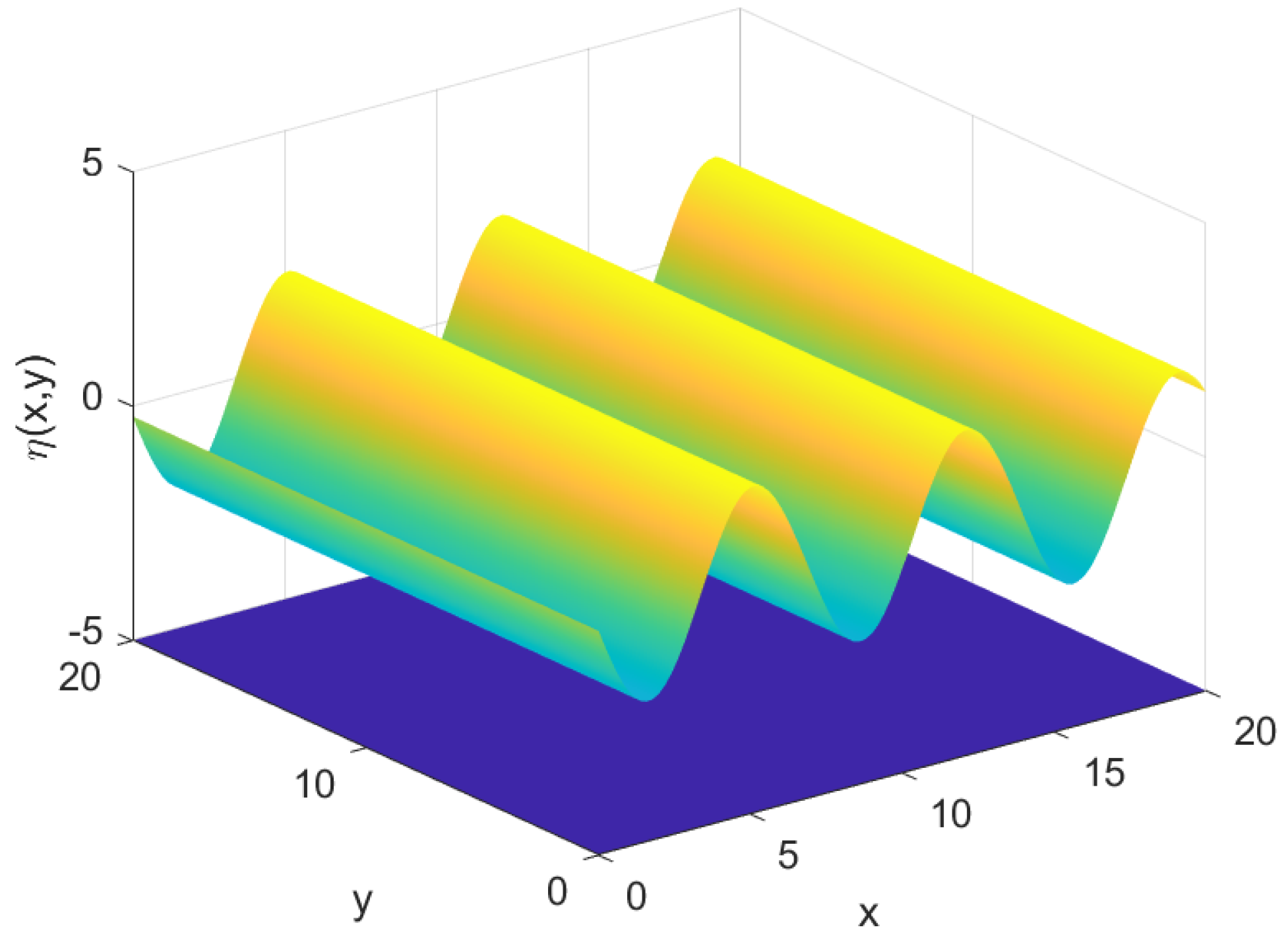
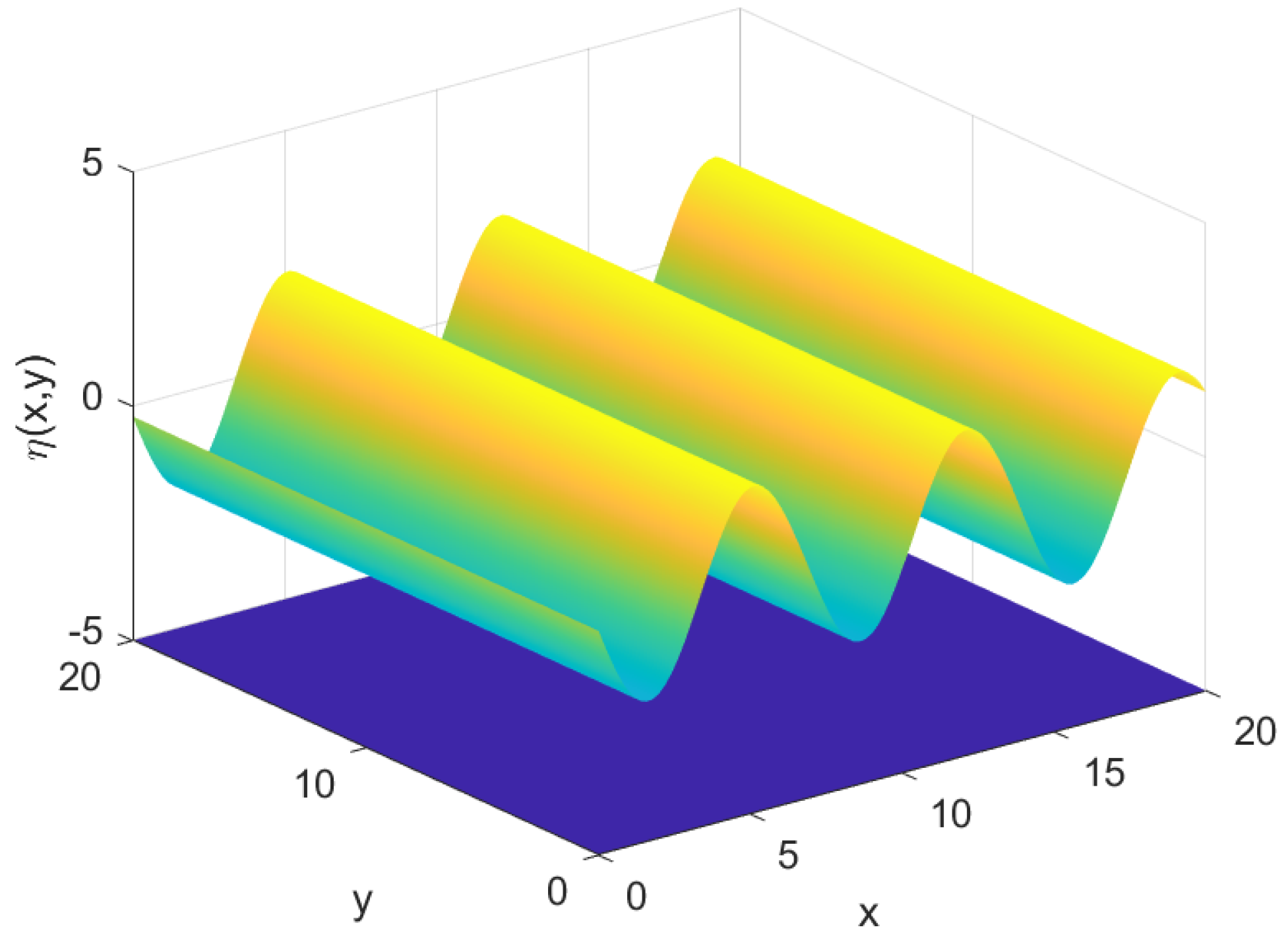
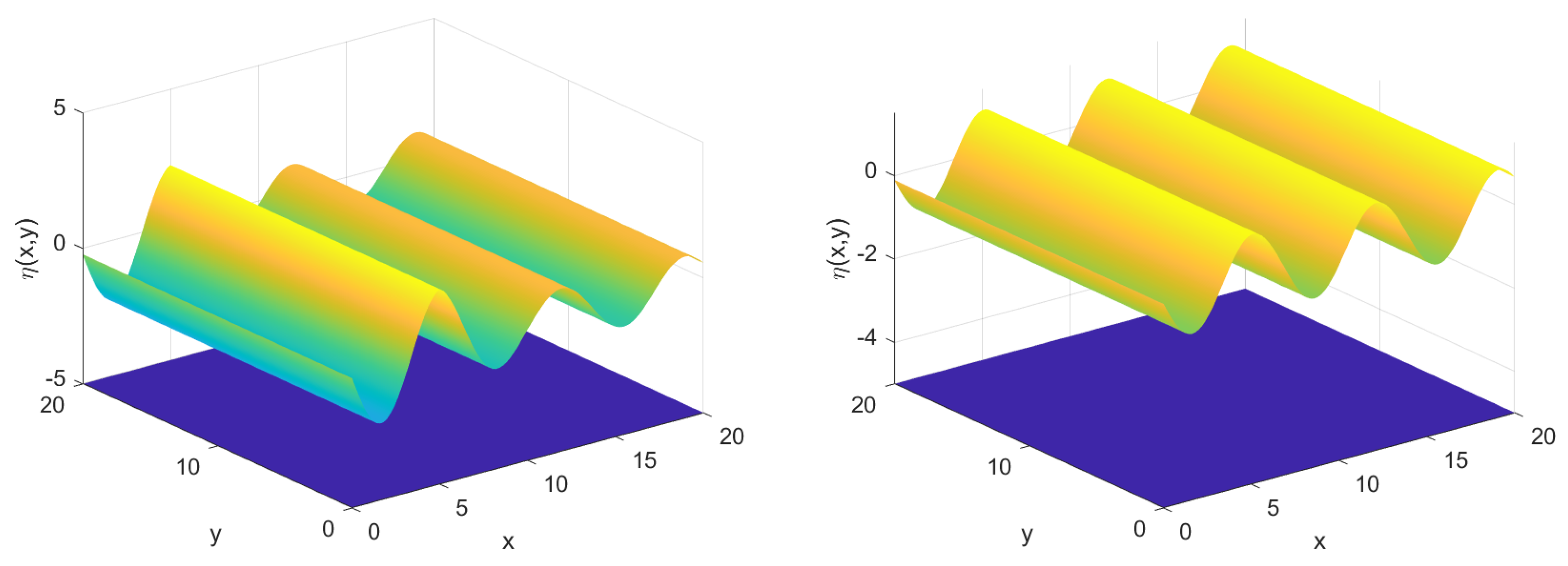
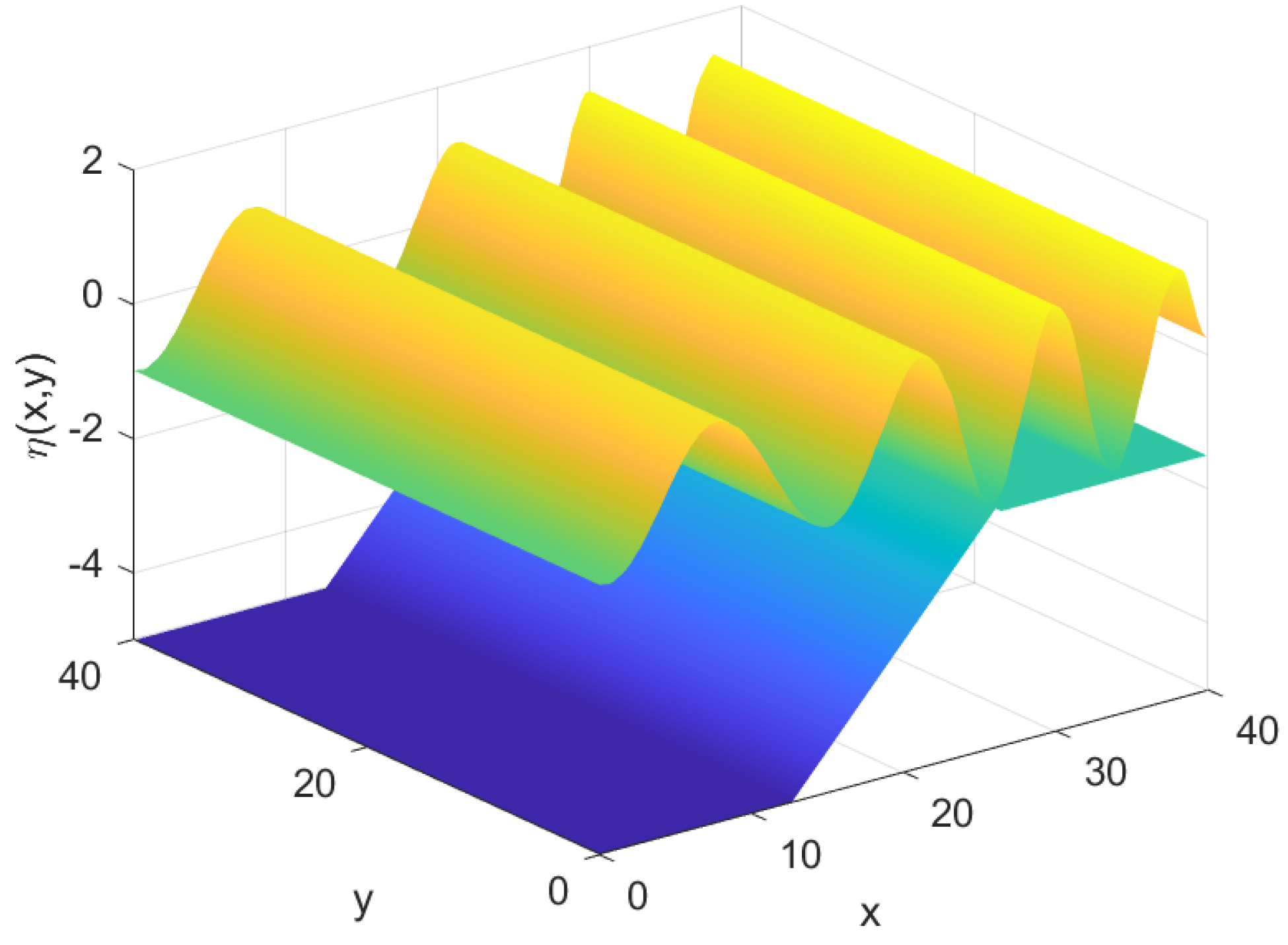
5.3. Two-Dimensional (2-D) Numerical Simulations
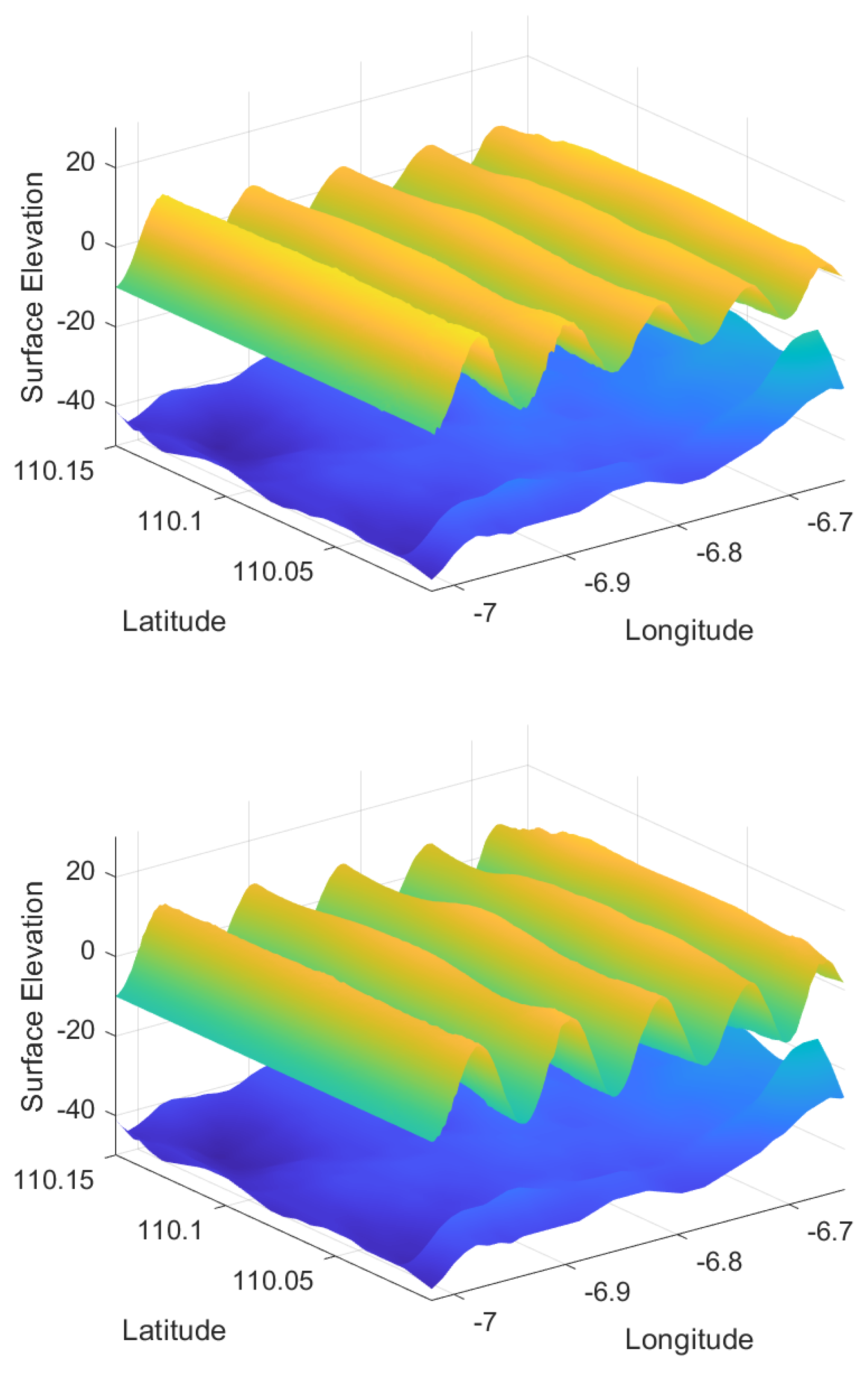
5.4. Comparing the Two-Dimensional (2-D) Numerical Result and Real Experiment Data
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kopp, R.E.; Horton, R.M.; Little, C.M.; Mitrovica, J.X.; Oppenheimer, M.; Rasmussen, D.J.; Strauss, B.H.; Tebaldi, C. Probabilistic 21st and 22nd century sea-level projections at a global network of tide-gauge sites. Earth’s Future 2014, 2, 383–406. [Google Scholar] [CrossRef]
- Kopp, R.E.; DeConto, R.M.; Bader, D.A.; Hay, C.C.; Horton, R.M.; Kulp, S.; Oppenheimer, M.; Pollard, D.; Strauss, B.H. Evolving Understanding of Antarctic Ice-Sheet Physics and Ambiguity in Probabilistic Sea-Level Projections. Earth’s Future 2017, 5, 1217–1233. [Google Scholar] [CrossRef] [Green Version]
- Nauels, A.; Meinshausen, M.; Mengel, M.; Lorbacher, K.; Wigley, T.M.L. Synthesizing long-term sea level rise projections the MAGICC sea level model v2.0. Geosci. Model Dev. 2017, 10, 2495–2524. [Google Scholar] [CrossRef] [Green Version]
- Nauels, A.; Rogelj, J.; Schleussner, C.F.; Meinshausen, M.; Mengel, M. Linking sea level rise and socioeconomic indicators under the Shared Socioeconomic Pathways. Environ. Res. Lett. 2017, 12, 114002. [Google Scholar] [CrossRef] [Green Version]
- Bakker, A.M.R.; Wong, T.E.; Ruckert, K.L.; Keller, K. Sea-level projections representing the deeply uncertain contribution of the West Antarctic ice sheet. Sci. Rep. 2017, 7. [Google Scholar] [CrossRef] [Green Version]
- Wong, T.E.; Bakker, A.M.; Keller, K. Impacts of Antarctic fast dynamics on sea-level projections and coastal flood defense. Clim. Chang. 2017, 144, 347–364. [Google Scholar] [CrossRef]
- Jevrejeva, S.; Moore, J.; Grinsted, A. Sea level projections to AD2500 with a new generation of climate change scenarios. Glob. Planet. Chang. 2012, 80, 14–20. [Google Scholar] [CrossRef]
- Altomare, C.; Crespo, A.; Rogers, B.D.; DomÃnguez, J.M.; Gironella, X.; Gesteira, M. Numerical Modelling of Armour Block Sea Breakwater with Smoothed Particle Hydrodynamics. Comput. Struct. 2014, 130, 34–45. [Google Scholar] [CrossRef]
- Johnson, H. Wave modelling in the vicinity of submerged breakwaters. Coast. Eng. 2006, 53, 39–48. [Google Scholar] [CrossRef]
- Balaji, R.; Kumar, S.S.; Misra, A. Understanding the effects of seawall construction using a combination of analytical modelling and remote sensing techniques: Case study of Fansa, Gujarat, India. Int. J. Ocean Clim. Syst. 2017, 8, 153–160. [Google Scholar] [CrossRef] [Green Version]
- Magdalena, I.; Atras, M.F.; Sembiring, L.; Nugroho, M.A.; Labay, R.S.B.; Roque, M.P. Wave Transmission by Rectangular Submerged Breakwaters. Computation 2020, 8, 56–73. [Google Scholar] [CrossRef]
- Magdalena, I.; Iryanto; Reeve, D. Free-surface long wave propagation over linear and parabolic transition shelves. Water Sci. Eng. 2018, 11, 318–327. [Google Scholar] [CrossRef]
- Pudjaprasetya, S.R.; Magdalena, I. Wave Energy Dissipation over Porous Media. Appl. Math. Sci. 2013, 7, 2925–2937. [Google Scholar] [CrossRef]
- Ondiviela, B.; Losada, I.; Lara, J.; Maza, M.; Galvan, C.; Bouma, T.; Belzen, J. The Role of Seagrass in Coastal Protection in a Changing Climate. J. Coast. Eng. 2013, 87, 158–168. [Google Scholar] [CrossRef]
- Borsje, B.W.; van Wesenbeeck, B.K.; Dekker, F.; Paalvast, P.; Bouma, T.J.; van Katwijk, M.M.; de Vries, M.B. How ecological engineering can serve in coastal protection. Ecol. Eng. 2011, 37, 113–122. [Google Scholar] [CrossRef]
- Vuik, V.; Jonkman, S.N.; Borsje, B.W.; Suzuki, T. Nature-based flood protection: The efficiency of vegetated foreshores for reducing wave loads on coastal dikes. Coast. Eng. 2016, 116, 42–56. [Google Scholar] [CrossRef] [Green Version]
- deVriend, H.J.; van Koningsveld, M.; Aarninkhof, S.G.J.; de Vries, M.B.; Baptist, M.J. Sustainable hydraulic engineering through building with nature. J. Hydro-Environ. Res. 2015, 9, 159–171. [Google Scholar] [CrossRef]
- Temmerman, S.; Meire, P.; Bouma, T.J.; Herman, P.M.J.; Ysebaert, T.; de Vriend, H. Ecosystem-based coastal defence in the face of global change. Nature 2013, 504, 79–83. [Google Scholar] [CrossRef] [PubMed]
- Cuc, N.T.K.; Suzuki, T.; van Steveninck, E.D.R.; Hai, H. Modelling the impacts of mangrove vegetation structure on wave dissipation in Ben Tre Province, Vietnam, under different climate change scenarios. J. Coast. Res. 2015, 31, 340–347. [Google Scholar] [CrossRef] [Green Version]
- Hu, Z.; Suzuki, T.; Zitman, T.; Uittewaal, W.; Stive, M. Laboratory study on wave dissipation by vegetation in combined current-wave flow. Coast. Eng. 2014, 88, 131–142. [Google Scholar] [CrossRef]
- Chen, H.; Ni, Y.; Li, Y.; Liu, F.; Ou, S.; Su, M.; Peng, Y.; Hu, Z.; Wim, U.; Tomohiro, S. Deriving vegetation drag coefficients in combined wave-current flows by calibration and direct measurement methods. Adv. Water Resour. 2018, 122, 217–227. [Google Scholar] [CrossRef] [Green Version]
- Hasselmann, K.; Collins, J.I. Spectral dissipation of finite-depth gravity waves due to turbulent bottom friction. J. Mar. Res. 1968, 26, 1–12. [Google Scholar]
- Möller, I.; Spencer, T.; French, J.R.; Leggett, D.J.; Dixon, M. Wave transformation over salt marshes: A field and numerical modelling study from north Norfolk, England. Estuar. Coast. Shelf Sci. 1999, 49, 411–426. [Google Scholar] [CrossRef]
- Morison, J.R.; O’Brien, M.P.; Johnson, J.W.; Schaaf, S.A. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Dalrymple, R.; Kirby, J.; Hwang, P. Wave diffraction due to areas of energy dissipation. J. Waterw. Coast. Ocean Eng. 1984, 110, 67–79. [Google Scholar] [CrossRef]
- Mendez, F.J.; Losada, I.J. An empirical model to estimate the propagation of random breaking and nonbreaking waves over vegetation fields. Coast. Eng. 2004, 51, 103–118. [Google Scholar] [CrossRef]
- Suzuki, T.; Zijlema, M.; Burger, B.; Meijer, M.C.; Narayan, S. Wave dissipation by vegetation with layer schematization in SWAN. Coast. Eng. 2012, 59, 64–71. [Google Scholar] [CrossRef]
- Andadari, G.R. Kajian Analitik, Numerik, dan Eksperimen Terhadap Peredaman Gelombang Oleh Vegetasi. [On the Electrodynamics of Moving Bodies]. Bachelor’s Thesis, Institut Teknologi Bandung, Bandung, Indonesia, 2019. (In Indonesian). [Google Scholar]
- Anderson, M.; Smith, J. Wave attenuation by flexible, idealized salt marsh vegetation. Coast. Eng. 2014, 83, 82–92. [Google Scholar] [CrossRef]
- Asano, T.; Deguchi, H.; Kobayashi, N. Interaction between water waves and vegetation. In Proceedings of the 23rd International Conference on Coastal Engineering, Venice, Italy, 4–9 October 1992; Volume 1, pp. 2710–2723. [Google Scholar] [CrossRef]
- John, B.; Shirlal, K.; Rao, S.; Rajasekaran, C. Effect of Artificial Seagrass on Wave Attenuation and Wave Run-up. Int. J. Ocean Clim. Syst. 2016, 7, 14–19. [Google Scholar] [CrossRef]
- Kobayashi, N.; Raichle, A.; Asano, T. Wave Attenuation by Vegetation. J. Waterw. Port Coast. Ocean Eng. 1993, 119. [Google Scholar] [CrossRef]
- Magdalena, I.; Rifatin, H.Q.; Reeve, D.E. Seiches and harbour oscillations in a porous semi-closed basin. Appl. Math. Comput. 2020, 369, 124835. [Google Scholar] [CrossRef]
- Magdalena, I.; Pudjaprasetya, S.R.; Wiryanto, L. Wave interaction with an Immerged Porous Media. Adv. Appl. Math. Mech. 2014, 6, 680–692. [Google Scholar] [CrossRef]
- Hadadpour, S.; Paul, M.; Oumeraci, H. Numerical Investigation of Wave Attenuation by Rigid Vegetation Based on a Porous Media Approach. J. Coast. Res. 2019, 92. [Google Scholar] [CrossRef]
- Verhagen, H. The use of mangroves in coastal protection. In Proceedings of the 8th International Conference on Coastal and Port Engineering in Developing Countries, Chennai, India, 20–24 February 2012. [Google Scholar]
- Augustin, L.N.; Irish, J.L.; Lynett, P. Laboratory and numerical studies of wave damping by emergent and near-emergent wetland vegetation. Coast. Eng. 2009, 56, 332–340. [Google Scholar] [CrossRef]
- Cao, H.; Feng, W.; Hu, Z.; Suzuki, T.; Stive, M.J.F. Numerical modeling of vegetation induced dissipation using an extended mild-slope equation. Coast. Eng. 2015, 110, 258–269. [Google Scholar] [CrossRef]
- Maza, M.; Lara, J.L.; Losada, I.J. A coupled model of submerged vegetation under oscillatory flow using Navier-Stokes equations. Coast. Eng. 2013, 80, 16–34. [Google Scholar] [CrossRef]
- Suzuki, T.; Hu, Z.; Kumada, K.; Phan, L.K.; Zijlema, M. Non-hydrostatic modeling of drag, inertia and porous effects in wave propagation over dense vegetation fields. Coast. Eng. 2019, 149, 49–64. [Google Scholar] [CrossRef]
- Thuy, N.B.; Tanimoto, K.; Tanaka, N.; Harada, K.; Limura, K. Effect of open gap in coastal forest on tsunami run-up – investigations by experiment and numerical simulation. Coast. Eng. 2009, 36, 1258–1269. [Google Scholar] [CrossRef]
- Limura, K.; Tanaka, N. Numerical simulation estimating effects of tree density distribution in coastal forest on tsunami mitigation. Coast. Eng. 2012, 54, 223–232. [Google Scholar] [CrossRef]
- Mancheña, A.G.; Jansen, W.; Uijttewaal, W.S.J.; Reniers, A.J.H.M.; van Rooijen, A.A.; Suzuki, T.; Etminan, V.; Winterwerp, J.C. Wave transmission and drag coefficients through dense cylinder arrays: Implications for designing structures for mangrove restoration. Ecol. Eng. 2021, 54, 223–232. [Google Scholar] [CrossRef]
- Altaie, H.; Dreyfuss, P. Numerical Solution for 2D Depth-Averaged Shallow Water Equations. Int. Math. Forum 2018, 13, 79–90. [Google Scholar] [CrossRef]
- Anastasiou, K.; Chan, C.T. Solution of the 2D Shallow Water Equations Using the Finite Volume Method on Unstructured Triangular Meshes. Int. J. Numer. Methods Fluids 1999, 24, 1225–1245. [Google Scholar] [CrossRef]
- Arakawa, A.; Lamb, V.R. A Potential Enstrophy and Energy Conserving Scheme for the Shallow Water Equations. Mon. Weather Rev. 1981, 109, 18–36. [Google Scholar] [CrossRef] [Green Version]
- Holmes, M.H. Introduction to Numerical Methods in Differential Equations, 1st ed.; Springer: New York, NY, USA, 2007; Volume 52. [Google Scholar] [CrossRef] [Green Version]
- Kurganov, A. Finite-volume schemes for shallow-water-equations. Acta Numer. 2018, 27, 289–351. [Google Scholar] [CrossRef] [Green Version]
- Kurganov, A.; Levy, D. Central-Upwind Schemes for the Saint-Venant System. Math. Model. Numer. Anal. 2002, 36, 397–425. [Google Scholar] [CrossRef] [Green Version]
- Pudjaprasetya, S.R.; Magdalena, I.; Tjandra, S.S. A Nonhydrostatic Two-Layer Staggered Scheme for Transient Waves due to Anti-Symmetric Seabed Thrust. J. Earthq. Tsunami 2016, 11. [Google Scholar] [CrossRef] [Green Version]
- Stelling, G.; Duinmeijer, A. A staggered conservative scheme for every Froude number in rapidly varied shallow water flows. Int. J. Numer. Methods Fluids 2003, 43, 1329–1354. [Google Scholar] [CrossRef]
- Toro, E.F. Riemann Solvers and Numerical Methods for Fluid Dynamics, A Practical Introduction, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Randall, D. The Shallow Water Equations. 2006. Available online: https://www.semanticscholar.org/paper/The-Shallow-Water-Equations-Randall/5b3e977b10cc34444063ed1e38888b86c227f76d (accessed on 21 May 2021).
- Madsen, O.; Rosengaus, M. Spectral Wave Attenuation by Bottom Friction: Experiments. In Proceedings of the 21st International Conference on Coastal Engineering, Costa del Sol-Malaga, Spain, 20–25 June 1988; Volume 1, pp. 849–857. [Google Scholar] [CrossRef]
- Magdalena, I.; Erwina, N.; Pudjaprasetya, S.R. Staggered Momentum Conservative Scheme For Radial Dam Break Simulation. J. Sci. Comput. 2015, 65, 867–874. [Google Scholar] [CrossRef]
- Pudjaprasetya, S.R.; Magdalena, I. Momentum Conservative Schemes for Shallow Water Flows. East Asian J. Appl. Math. 2014, 4. [Google Scholar] [CrossRef]
- Magdalena, I.; Pudjaprasetya, S.R. Numerical Modeling of 2D Wave Refraction and Shoaling. AIP Conf. Proc. 2014, 1589, 480–483. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Time | Water Height | Experimental | Numerical | Error (%) | |||
|---|---|---|---|---|---|---|---|---|
| Land-Ward | Sea-Ward | Friction | Diffusion | Friction | Diffusion | |||
| 6 Feb | 18.00 | 63 | 97 | 0.65 | 0.64 | 0.68 | 2 | 4 |
| 18.30 | 66 | 100 | 0.66 | 0.64 | 0.68 | 3 | 2 | |
| 19.00 | 60 | 92 | 0.65 | 0.64 | 0.68 | 2 | 4 | |
| 19.30 | 58 | 89 | 0.65 | 0.64 | 0.68 | 2 | 4 | |
| 7 Feb | 18.30 | 91 | 142 | 0.64 | 0.64 | 0.68 | 0 | 5 |
| 19.00 | 43 | 69 | 0.62 | 0.64 | 0.68 | 2 | 8 | |
| 19.30 | 50 | 75 | 0.67 | 0.64 | 0.68 | 4 | 1 | |
| 20.00 | 57 | 86 | 0.66 | 0.64 | 0.68 | 4 | 2 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magdalena, I.; Kusnowo, V.; Azis, M.I.; Widowati. 1D–2D Numerical Model for Wave Attenuation by Mangroves as a Porous Structure. Computation 2021, 9, 66. https://doi.org/10.3390/computation9060066
Magdalena I, Kusnowo V, Azis MI, Widowati. 1D–2D Numerical Model for Wave Attenuation by Mangroves as a Porous Structure. Computation. 2021; 9(6):66. https://doi.org/10.3390/computation9060066
Chicago/Turabian StyleMagdalena, Ikha, Vivianne Kusnowo, Moh. Ivan Azis, and Widowati. 2021. "1D–2D Numerical Model for Wave Attenuation by Mangroves as a Porous Structure" Computation 9, no. 6: 66. https://doi.org/10.3390/computation9060066
APA StyleMagdalena, I., Kusnowo, V., Azis, M. I., & Widowati. (2021). 1D–2D Numerical Model for Wave Attenuation by Mangroves as a Porous Structure. Computation, 9(6), 66. https://doi.org/10.3390/computation9060066