
An Ultrahigh-Sensitivity Graphene Resonant Gyroscope

Abstract
:1. Introduction
2. The Operating Principle
2.1. Theoretical Basis of Resonant Gyroscope with Direct Frequency Output
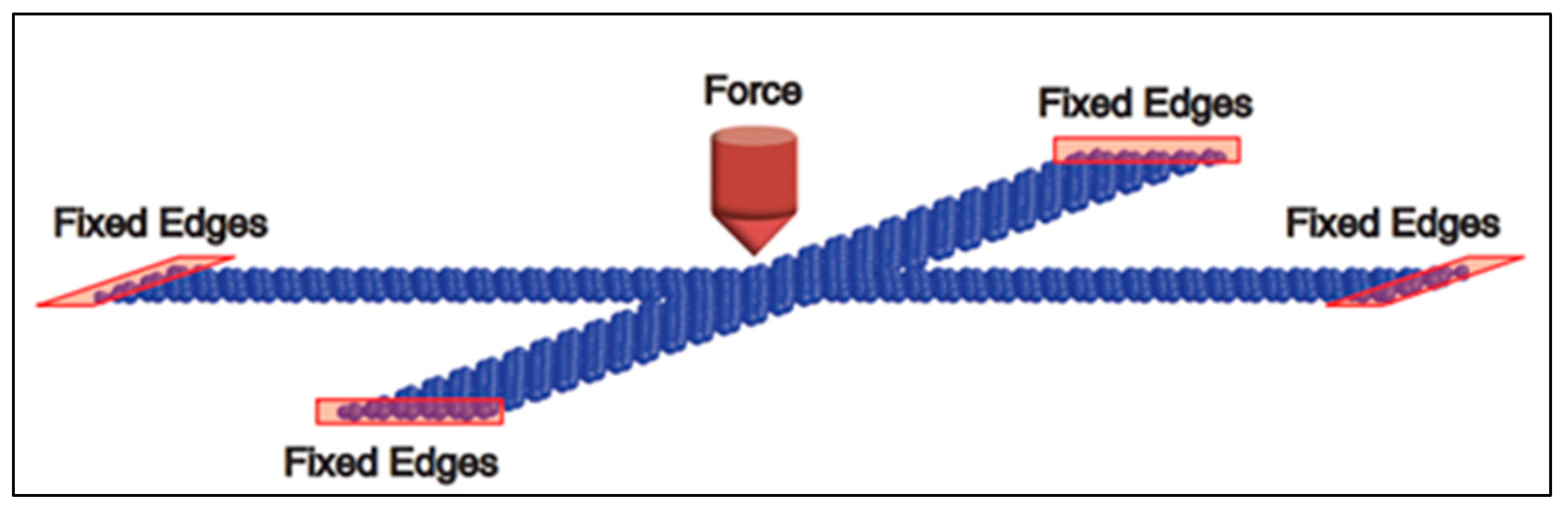
2.2. Theoretical Analysis of Double-Clamped Graphene Resonant Beam
- (a)
- The central inertia axis of each section of the beam is in the same plane, and the beam moves laterally in this plane.
- (b)
- The ratio of the cross-sectional area size of the beam to its length is relatively small, and the influence of shear deformation and the moment of inertia around the central axis of the section can be ignored.
- (c)
- The transverse vibration of the beam conforms to the assumption of small deflection plane bending, i.e., the amplitude of the transverse vibration is very small and within the linear range.
3. Design and Simulation of Graphene Resonator Gyroscope
- (a)
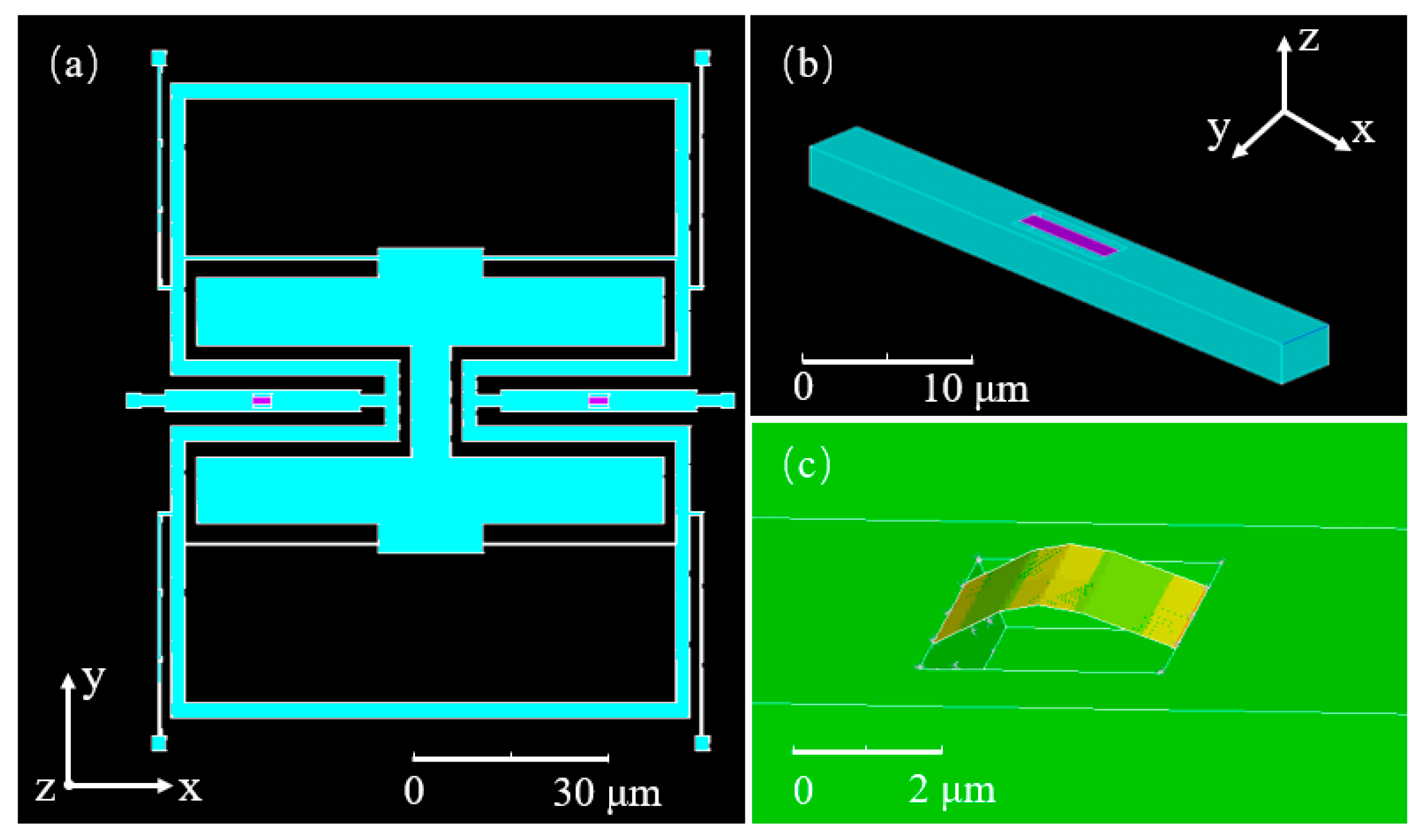
- On the basis of silicon-based materials, single graphene beams are supported by intermolecular van der Waals forces in the etched grooves of the Si transfer beams, as shown in Figure 6b.
- (b)
- The mass block is driven to move in a simple and harmonic way in the y-axis direction. When the angular velocity in the z-axis direction is generated, as stated in Equation (1), the Coriolis force is generated in the x-axis direction.
- (c)
- The Coriolis force passes through the x-axis direction of the symmetrical Si transfer beam, which causes the Si transfer beam to generate axial strain, which in turn causes an axial stress change in the double-clamped graphene beam on the Si transmission beam, effectively changing the resonant frequency state of the graphene.
- (d)
- As stated in Equation (4), the magnitude of the angular velocity is demodulated by tuning the direct output frequency.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Novoselov, K.S.; Geim, A.K.; Morozov, S.V.; Jiang, D.; Zhang, Y.; Dubonos, S.V.; Grigorieva, I.V.; Firsov, A.A. Electric field effect in atomically thin carbon films. Science 2004, 306, 666–669. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, C.; Wei, X.; Kysar, J.W.; Hone, J. Measurement of the elastic properties and intrinsic strength of monolayer graphene. Science 2008, 321, 385–388. [Google Scholar] [CrossRef]
- Brahim, A.; Memon, N.; Adnan, A.; Marwan, K. Recent Progress in the Growth and Applications of Graphene as a Smart Material: A Review. Front. Mater. 2015, 2, 58. [Google Scholar]
- Zang, X.; Zhou, Q.; Chang, J.; Liu, Y.; Lin, L. Graphene and carbon nanotube (CNT) in MEMS/NEMS applications. Microelectron. Eng. 2015, 132, 192–206. [Google Scholar] [CrossRef]
- Khan, Z.H.; Kermany, A.R.; Öchsner, A.; Iacopi, F. Mechanical and electromechanical properties of graphene and their potential application in MEMS. J. Phys. D Appl. Phys. Europhys. 2017, 50, 053003. [Google Scholar] [CrossRef] [Green Version]
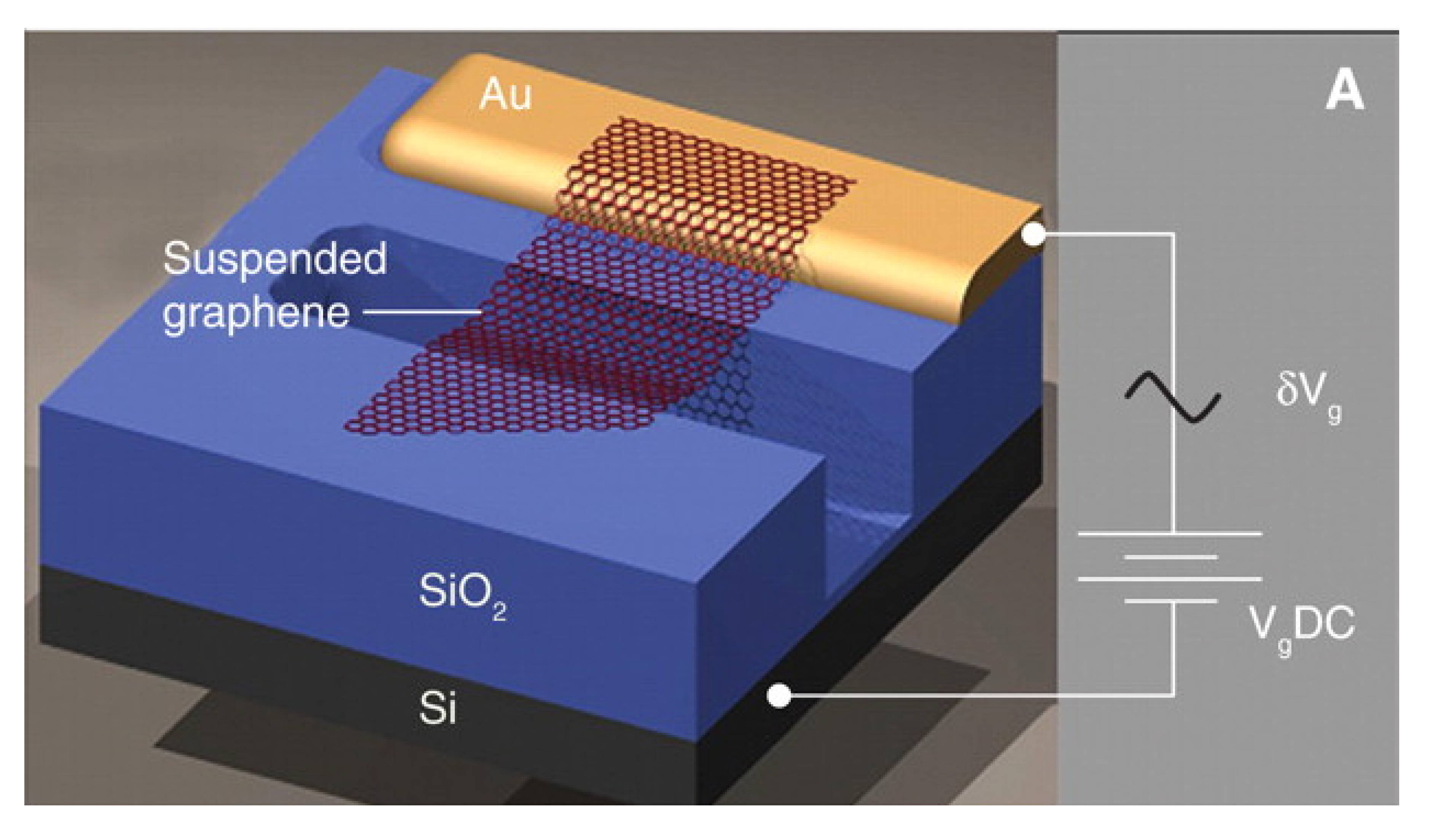
- Bunch, J.S.; van der Zande, A.M.; Verbridge, S.; Frank, I.W. Electromechanical Resonators from Graphene Sheets. Science 2007, 315, 490–493. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Rosenblatt, S.; Bolotin, K.I.; Kalb, W.; Kim, P.; Kymissis, I.; Stormer, H.L.; Heinz, T.F.; Hone, J. Performance of monolayer graphene nanomechanical resonators with electrical readout. Nat. Nanotechnol. 2009, 4, 861–867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kang, J.W.; Lee, J.H.; Hwang, H.J.; Kim, K.S. Developing accelerometer based on graphene nanoribbon resonators. Phys. Lett. A 2012, 376, 3248–3255. [Google Scholar] [CrossRef]
- Kwon, O.K.; Kim, K.S.; Park, J.; Kang, J.W. Molecular dynamics modeling and simulations of graphene-nanoribbon-resonator-based nanobalance as yoctogram resolution detector. Comput. Mater. Sci. 2013, 67, 329–333. [Google Scholar] [CrossRef]
- Natsuki, T.; Shi, J.X.; Ni, Q.Q. Vibration analysis of nanomechanical mass sensor using double-layered graphene sheets resonators. J. Appl. Phys. 2013, 114, 094307. [Google Scholar] [CrossRef]
- Kang, J.W.; Park, J.H.; Lee, G.Y.; Kim, K.S. Molecular dynamics simulation on crossroad-type graphene-resonator accelerometer. J. Comput. Theor. Nanosci. 2015, 12, 4186–4190. [Google Scholar] [CrossRef]
- Shi, F.T.; Fan, S.C.; Li, C.; Peng, X.B. Modeling and Analysis of a Novel Ultrasensitive Differential Resonant Graphene Micro-Accelerometer with Wide Measurement Range. Sensors 2018, 18, 2266. [Google Scholar] [CrossRef] [Green Version]
- Xiao, X.; Fan, S.-C.; Li, C.; Xing, W.-W. Stress-Insensitive Resonant Graphene Mass Sensing via Frequency Ratio. Sensors 2019, 19, 3027. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.; Seeger, J.I.; Kraft, M.; Boser, B.E. A monolithic surface micromachined Z-axis gyroscope with digital output. Digest of Technical Papers. In Proceedings of the 2000 Symposium on VLSI Circuits, Honolulu, HI, USA, 15–17 June 2000; pp. 16–19. [Google Scholar]
- Seshia, A.A.; Howe, R.T.; Montague, S. An integrated microelectromechanical resonant output gyroscope. In Proceedings of the Fifteenth IEEE International Conference on Micro Electro Mechanical System (MEMS 2002), Las Vegas, NV, USA, 24 January 2002; pp. 722–726. [Google Scholar]
- Li, Y.; Fan, S.; Guo, Z.; Cao, L. Frequency measurement study of resonant vibratory gyroscopes. J. Sound Vib. 2012, 331, 4417–4424. [Google Scholar] [CrossRef]
- Yan, L.; Fan, S.; Guo, Z.; Jing, L.; Le, C. Study of dynamic characteristics of resonators for MEMS resonant vibratory gyroscopes. Microsyst. Technol. 2012, 18, 639–647. [Google Scholar] [CrossRef]
- Atalaya, J.; Isacsson, A.; Kinaret, J.M. Continuum elastic modeling of graphene resonators. Nano Lett. 2008, 8, 4196–4200. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kwon, O.K.; Lee, J.H.; Park, J.; Kim, K.S.; Kang, J.W. Molecular dynamics simulation study on graphene-nanoribbon-resonators tuned by adjusting axial strain. Curr. Appl. Phys. 2013, 13, 360–365. [Google Scholar] [CrossRef]
- Kang, J.W.; Kim, H.W.; Kim, K.S.; Lee, J.H. Molecular dynamics modeling and simulation of a graphene-based nanoelectromechanical resonator. Curr. Appl. Phys. 2013, 13, 789–794. [Google Scholar] [CrossRef]
- Park, S.K.; Gao, X.L. Bernoulli-Euler beam model based on a modified couple stress theory. J. Micromech. Microeng. 2006, 16, 2355. [Google Scholar] [CrossRef]
- Sun, C.T.; Zhang, H. Size-dependent elastic moduli of platelike nanomaterials. J. Appl. Phys. 2003, 93, 1212–1218. [Google Scholar] [CrossRef]
- Bao, F.; Yu, H.; Huang, Q. Elastic Modulus of Nanometer Silicon Membrane. In Proceedings of the IEEE International Conference on Information Acquisition, Veihai, China, 20–23 August 2006; pp. 85–90. [Google Scholar]
- Gao, S.; Shen, H. Vibration Mechanics, 2nd ed.; China Railway Press: Beijing, China, 2016; pp. 124–128. [Google Scholar]
- Garcia-Sanchez, D.; van der Zande, A.M.; Paulo, A.S.; Lassagne, B.; McEuen, P.L.; Bachtold, A. Imaging mechanical vibrations in suspended graphene sheets. Nano Lett. 2008, 8, 1399–1403. [Google Scholar] [CrossRef] [PubMed] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Si Geometric Parameters | Si Material Properties | ||||
| Length (μm) | Width (μm) | Thickness (μm) | Young’s modulus (GPa) | Poisson ratio | Density (kg/m3) |
| 30 | 3 | 3 | 130 | 0.28 | 2330 |
| Graphene Geometric Parameters | Graphene Material Properties | ||||
| Length (μm) | Width (μm) | Thickness (nm) | Young’s modulus (GPa) | Poisson ratio | Density (kg/m3) |
| 3 | 1 | 0.335 | 1000 | 0.16 | 2200 |
| Size (Length, Width, and Thickness) | Resonant Frequency of Experimental Data (MHz) | Resonant Frequency of Finite Element Simulation (MHz) | Error |
|---|---|---|---|
| 1.1 μm× 1.93 μm × 0.3 nm | 5.4 [6] | 5.4983 | 1.82% |
| 2.8 μm × 0.5 μm × 6 nm | 17 [25] (The first frequency) | 16.933 | 0.39% |
| 46 [25] (The second frequency) | 46.992 | 2.1% | |
| 2.8 μm × 0.3 μm × 11 nm | 31 [25] | 30.986 | 0.04% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Guo, Z.-S.; Fan, S.-C. An Ultrahigh-Sensitivity Graphene Resonant Gyroscope. Nanomaterials 2021, 11, 1890. https://doi.org/10.3390/nano11081890
Lu Y, Guo Z-S, Fan S-C. An Ultrahigh-Sensitivity Graphene Resonant Gyroscope. Nanomaterials. 2021; 11(8):1890. https://doi.org/10.3390/nano11081890
Chicago/Turabian StyleLu, Yang, Zhan-She Guo, and Shang-Chun Fan. 2021. "An Ultrahigh-Sensitivity Graphene Resonant Gyroscope" Nanomaterials 11, no. 8: 1890. https://doi.org/10.3390/nano11081890