
An Energy Harvester Coupled with a Triboelectric Mechanism and Electrostatic Mechanism for Biomechanical Energy Harvesting




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results and Discussion
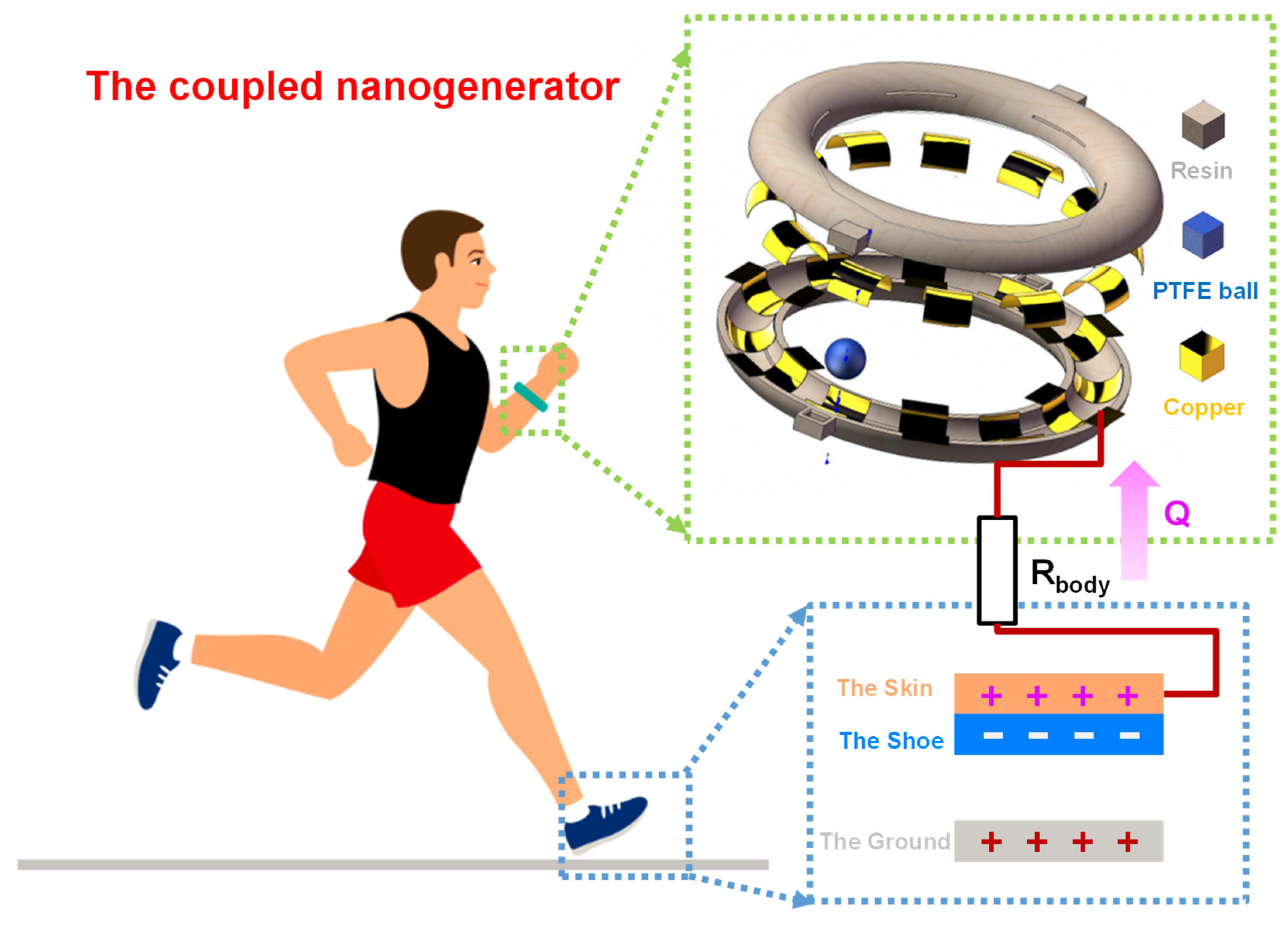
2.1. Working Principle
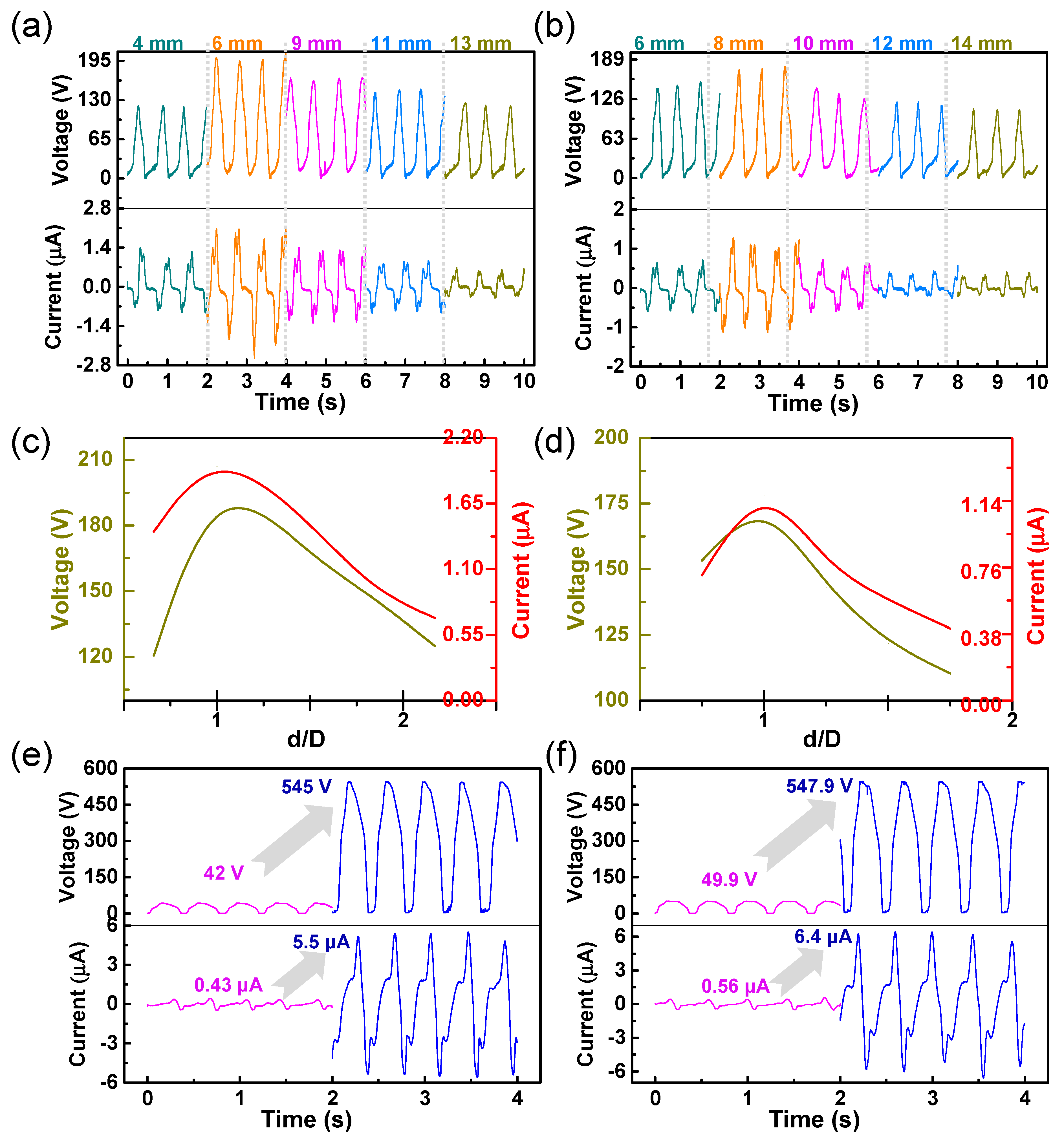
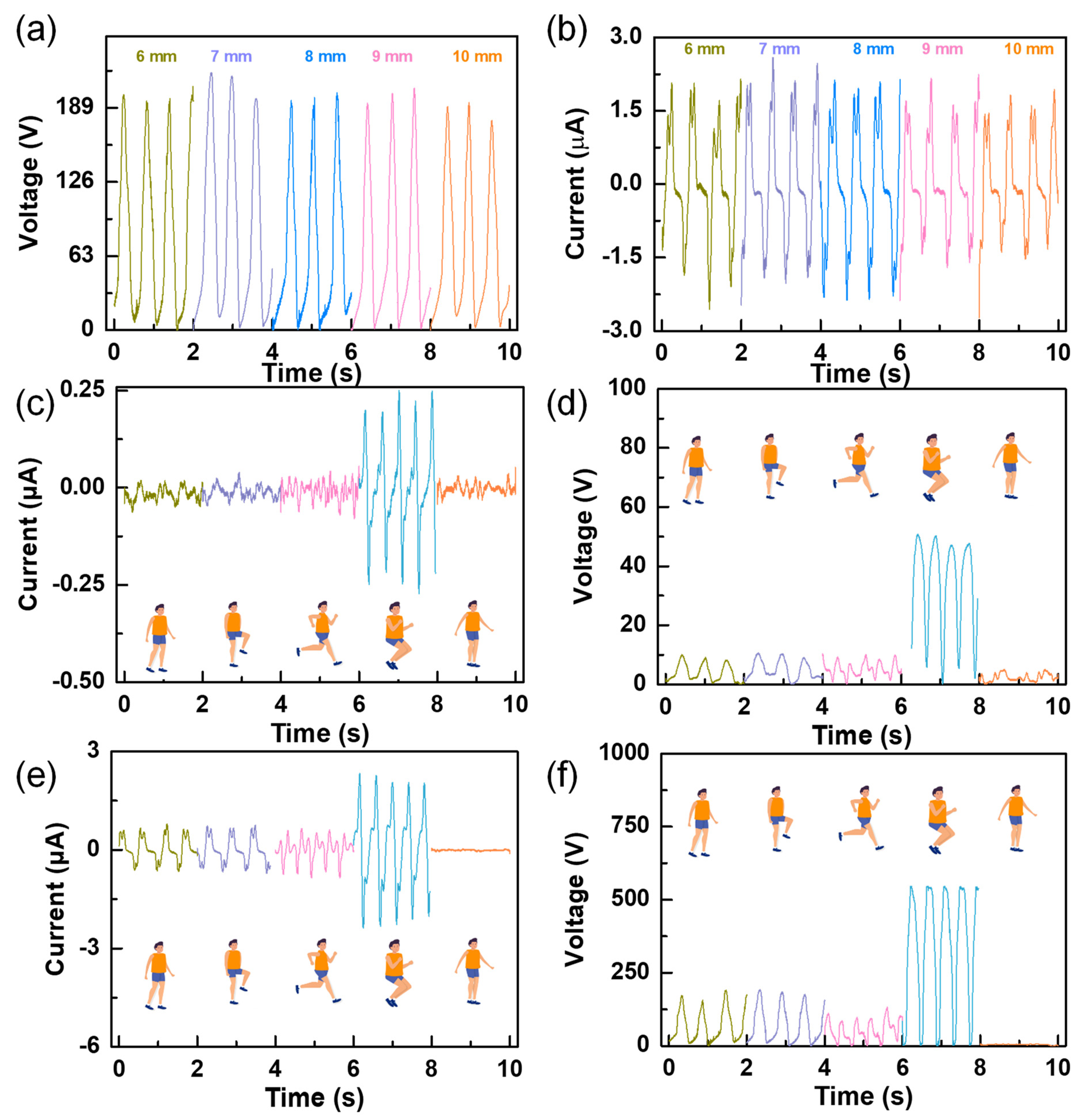
2.2. Electrical Characterization
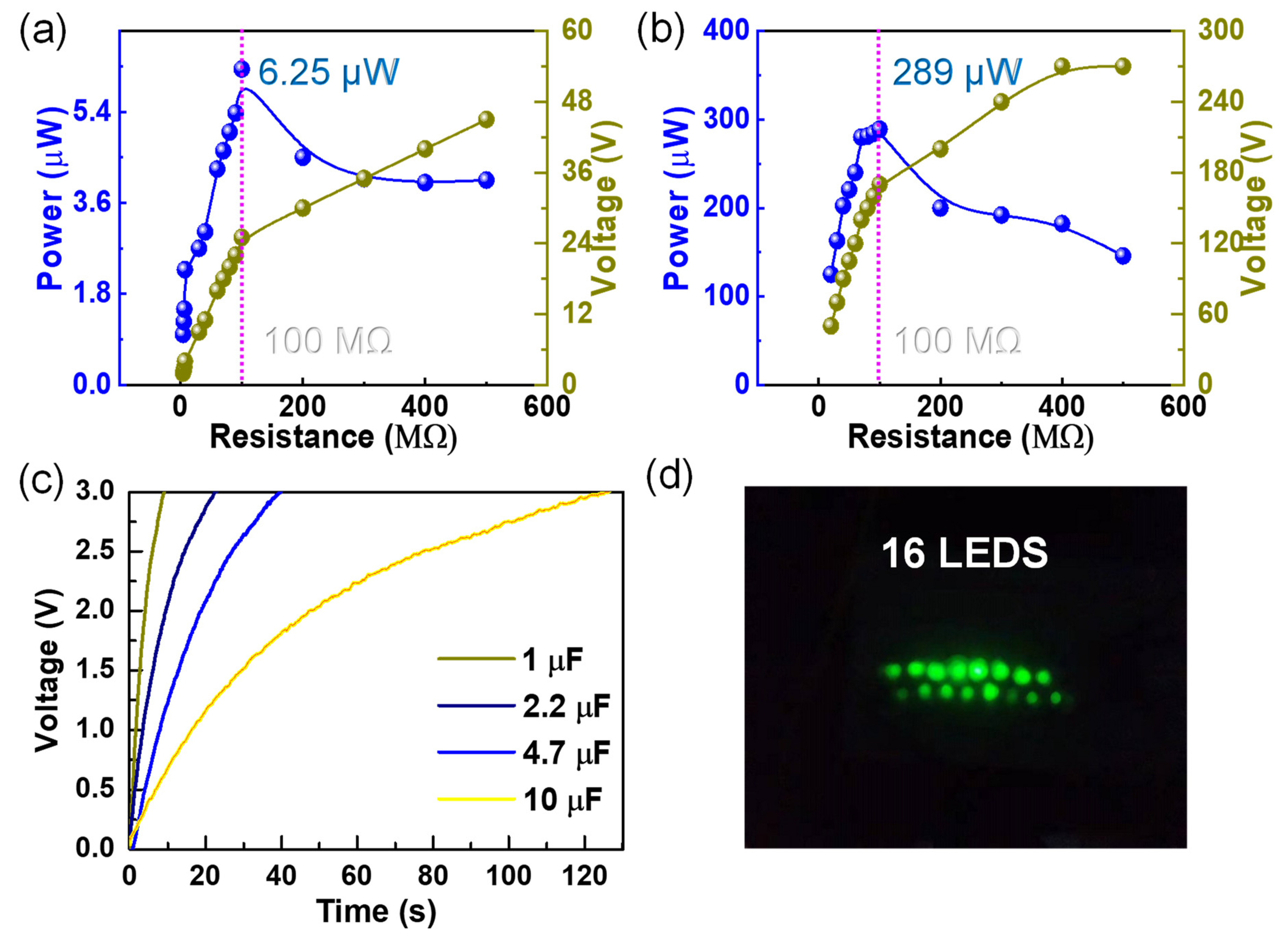
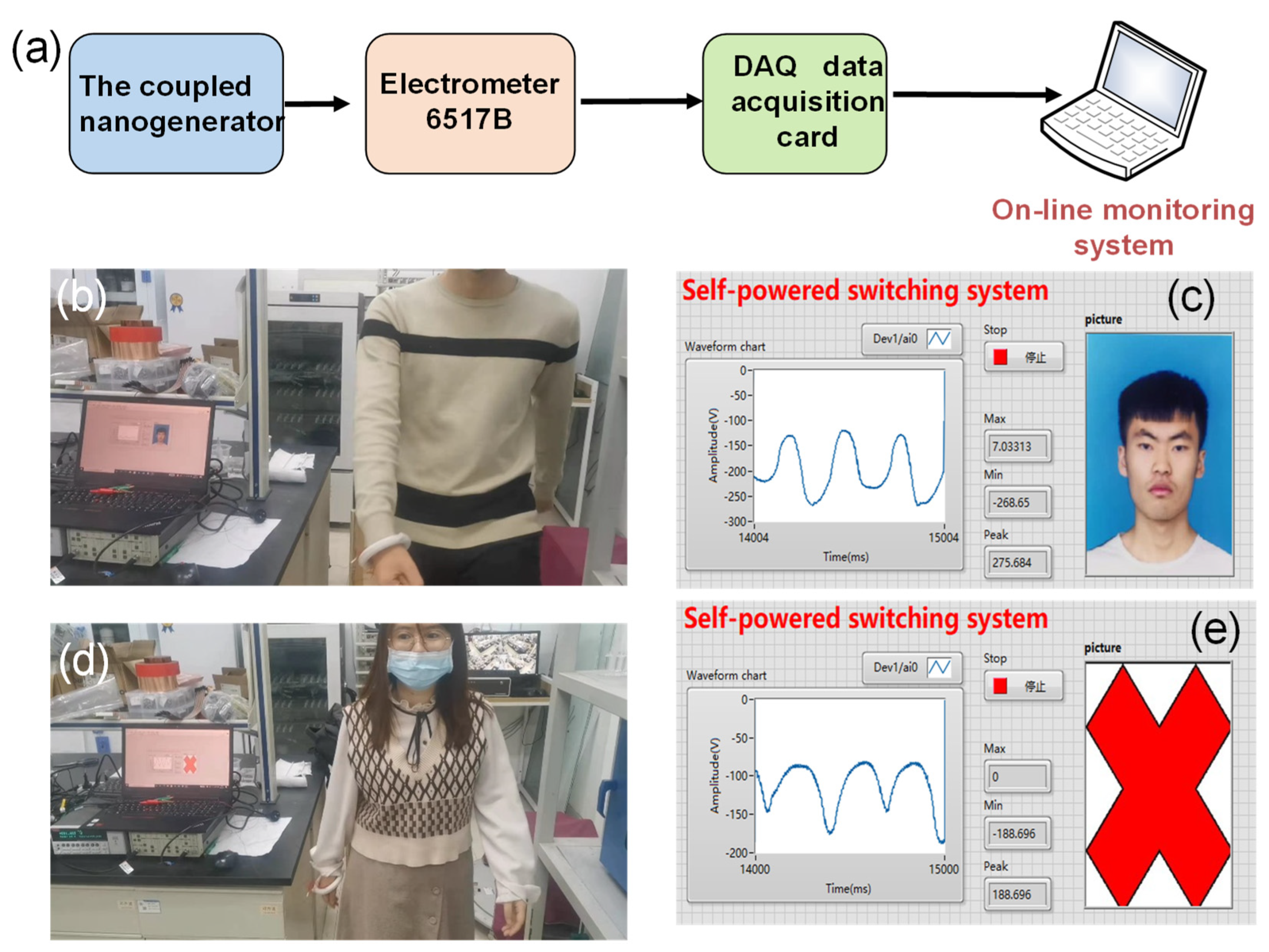
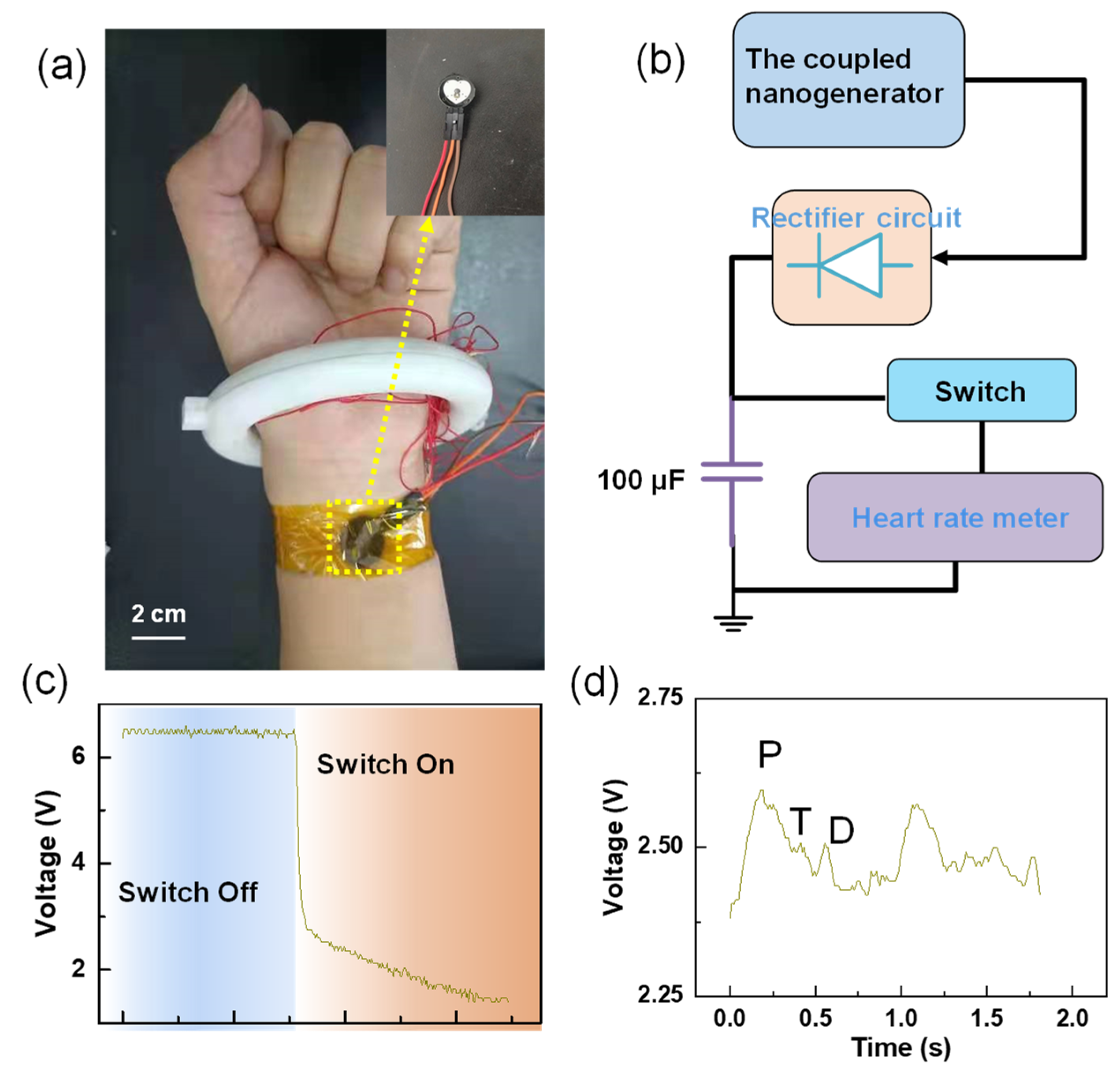
2.3. The Applications
3. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wei, Z.; Lin, S.; Li, Q.; Song, C.; Wang, F.; Tao, X.M. Fiber-based wearable electronics: A review of materials, fabrication, devices, and applications. Adv. Mater. 2014, 26, 5310. [Google Scholar]
- Han, Y.Z.; Yi, F.; Jiang, C.; Dai, K.R.; Xu, Y.C.; Wang, X.F.; You, Z. Self-powered gait pattern-based identity recognition by a soft and stretchable triboelectric band. Nano Energy 2019, 56, 516–523. [Google Scholar] [CrossRef]
- Zhang, Q.; Jin, T.; Cai, J.G.; Xu, L.; He, T.Y.Y.; Wang, T.H.; Tian, Y.Z.; Li, L.; Peng, Y.; Lee, C.K. Wearable triboelectric sensors enabled gait analysis and waist motion capture for iot-based smart healthcare applications. Adv. Sci. 2021, 9, 2103694. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Yuan, F.; Sang, M.; Zhou, J.Y.; Zhang, J.S.; Wang, S.; Li, J.S.; Xuan, S.H.; Gong, X.L. Functional sponge-based triboelectric nanogenerators with energy harvesting, oil–water separating and multi-mode sensing performance. J. Mater. Chem. A 2021, 9, 6913–6923. [Google Scholar] [CrossRef]
- Lin, Z.M.; Wu, Z.Y.; Zhang, B.B.; Wang, Y.C.; Guo, H.Y.; Liu, G.L.; Chen, C.Y.; Chen, Y.L.; Yang, J.; Wang, Z.L. A Triboelectric nanogenerator-based smart insole for multifunctional gait monitoring. Adv. Mater. Technol. 2018, 4, 1800360. [Google Scholar] [CrossRef]
- Wang, H.; Cheng, J.; Wang, Z.; Ji, L.; Wang, Z.L. Triboelectric nanogenerators for human-health care. Sci. Bull. 2020, 66, 490–511. [Google Scholar] [CrossRef]
- Maiti, S.; Karan, S.K.; Kim, J.K.; Khatua, B.H. Nature driven bio-piezoelectric/triboelectric nanogenerator as next-generation green energy harvester for smart and pollution free society. Adv. Energy Mater. 2019, 9, 1803027. [Google Scholar] [CrossRef]
- Lim, J.; Choi, D.S.; Lee, G.Y.; Lee, H.J.; Sasikala, S.P.; Lee, K.E.; Kang, S.H.; Kim, S.O. Omnidirectional deformable energy textile for human joint movement compatible energy storage. ACS Appl. Mater. Interfaces 2017, 9, 41363–41370. [Google Scholar] [CrossRef]
- Wu, H.Z.; Tatarenko, A.; Bichurin, M.I.; Wang, Y.J. A multiferroic module for biomechanical energy harvesting. Nano Energy 2021, 83, 105777. [Google Scholar] [CrossRef]
- Gao, L.X.; Chen, X.; Lu, S.; Zhou, H.; Xie, W.B.; Chen, J.F.; Qi, M.K.; Yu, H.; Mu, X.J.; Wang, Z.L.; et al. Enhancing the output performance of triboelectric nanogenerator via grating-electrode enabled surface plasmon excitation. Adv. Energy Mater. 2019, 9, 1902725. [Google Scholar] [CrossRef]
- Tcho, I.W.; Kim, W.G.; Choi, Y.K. A self-powered character recognition device based on a triboelectric nanogenerator. Nano Energy 2020, 70, 104534. [Google Scholar] [CrossRef]
- Zhen, W.; Shen, Q.; Sun, X. Nanogenerators for self-powered gas sensing. Nano-Micro Lett. 2017, 9, 1–19. [Google Scholar]
- Fu, H.L.; Mei, X.T.; Yurchenko, D.; Zhou, S.X.; Theodossiades, S.; Nakano, K.; Yeatamn, E.M. Rotational energy harvesting for self-powered sensing. Joule 2021, 5, 1074–1118. [Google Scholar] [CrossRef]
- Chen, J.; Han, K.; Luo, J.J.; Xu, L.; Tang, W.; Wang, Z.L. Soft robots with self-powered configurational sensing. Nano Energy 2020, 77, 105171. [Google Scholar] [CrossRef]
- Zhang, B.S.; Zhang, S.; Li, W.B.; Gao, Q.; Zhao, D.; Wang, Z.L.; Cheng, T.H. Self-powered sensing for smart agriculture by electromagnetic–triboelectric hybrid generator. ACS Nano 2021, 15, 20278–20286. [Google Scholar] [CrossRef]
- Ma, M.Y.; Zhang, Z.; Liao, Q.L.; Yi, F.; Han, L.H.; Zhang, G.J.; Liu, S.; Liao, X.Q.; Zhang, Y. Self-powered artificial electronic skin for high-resolution pressure sensing. Nano Energy 2017, 32, 389–396. [Google Scholar] [CrossRef]
- Askari, H.; Hashemi, E.; Khajepour, A.; Khamesee, M.B.; Wang, Z.L. Towards self-powered sensing using nanogenerators for automotive systems. Nano Energy 2018, 53, 1003–1019. [Google Scholar] [CrossRef]
- Xie, W.B.; Gao, L.X.; Wu, L.K.; Chen, X.; Wang, F.Y.; Tong, D.Q.; Zhang, J.; Lan, J.Y.; He, X.B.; Mu, X.J.; et al. A non-resonant hybridized electromagnetic-triboelectric nanogenerator for irregular and ultralow frequency blue energy harvesting. Research 2021, 1, 5963293. [Google Scholar]
- Islam, E.; Abdullah, A.M.; Chowdhury, A.R.; Tasnim, F.; Uddin, M.J. Electromagnetic-triboelectric-hybrid energy tile for biomechanical green energy harvesting. Nano Energy 2020, 77, 105250. [Google Scholar] [CrossRef]
- Zou, Y.J.; Raveendran, V.; Chen, J. Wearable triboelectric nanogenerators for biomechanical energy harvesting. Nano Energy 2020, 77, 105303. [Google Scholar] [CrossRef]
- Cheng, Y.; Gao, Y.Y.; Zhao, S.L.; Zhang, S.L.; Zhou, Y.H.; Deng, W.L.; Li, Z.W.; Jiang, G.; Jin, L.; Tian, G.; et al. A linear-to-rotary hybrid nanogenerator for high-performance wearable biomechanical energy harvesting. Nano Energy 2020, 67, 104235. [Google Scholar]
- Shen, J.L.; Li, Z.L.; Yu, J.Y.; Ding, B. Humidity-resisting triboelectric nanogenerator for high performance biomechanical energy harvesting. Nano Energy 2017, 40, 282–288. [Google Scholar] [CrossRef]
- Zhou, Z.H.; Weng, L.; Tat, T.; Libanori, A.; Lin, Z.M.; Ge, L.J.; Yang, J.; Chen, J. Smart insole for robust wearable biomechanical energy harvesting in harsh environments. ACS Nano 2020, 14, 14126–14133. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.B.; Zhou, S.X.; Zu, J.; Inman, D. High-performance piezoelectric energy harvesters and their applications. Joule 2018, 2, 642–697. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.L.; Bick, M.; Xiao, X.; Chen, G.R.; Nashalian, A.; Chen, J. Leveraging triboelectric nanogenerators for bioengineering. Matter 2021, 4, 845–887. [Google Scholar] [CrossRef]
- Gao, L.X.; Lu, S.; Xie, W.B.; Chen, X.; Wu, L.K.; Wang, T.T.; Wang, A.B.; Yue, C.Q.; Tong, D.Q.; Lei, W.Q.; et al. A self-powered and self-functional tracking system based on triboelectric-electromagnetic hybridized blue energy harvesting module. Nano Energy 2020, 72, 104684. [Google Scholar] [CrossRef]
- Ezzitouni, S.; Fernández-Yáez, P.; Sánchez, L.; Armas, O. Global energy balance in a diesel engine with a thermoelectric generator. Appl. Energy 2020, 269, 115139. [Google Scholar] [CrossRef]
- Dragunov, V.P.; Ostertak, D.I.; Pelmenev, K.G.; Sinitskiy, R.E.; Dragunova, E.V. Electrostatic vibrational energy converter with two variable capacitors. Sens. Actuators A Phys. 2020, 318, 112501. [Google Scholar] [CrossRef]
- Feser, J.P.; Ravichandran, J. More power to pyroelectrics. Nat. Mater. 2018, 17, 385–386. [Google Scholar] [CrossRef]
- Garcia, C.; Trendafilova, I. Real-time diagnosis of small energy impacts using a triboelectric nanosensor. Sens. Actuators A Phys. 2019, 291, 196–203. [Google Scholar] [CrossRef] [Green Version]
- Garcia, C.; Trendafilova, I.; de Villoria, R.G.; del Rio, J.S. Self-powered pressure sensor based on the triboelectric effect and its analysis using dynamic mechanical analysis. Nano Energy 2018, 50, 401–409. [Google Scholar] [CrossRef] [Green Version]
- Zou, H.; Zhang, Y.; Guo, L.; Wang, P.; He, X.; Dai, G.; Zheng, H.; Chen, C.; Wang, A.C.; Xu, C.; et al. Quantifying the triboelectric series. Nat. Commun. 2019, 10, 1427. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Niu, S.; Zhou, Y.S.; Wang, S.; Liu, Y.; Lin, L.; Bando, Y.; Wang, Z.L. Simulation method for optimizing the performance of an integrated triboelectric nanogenerator energy harvesting system. Nano Energy 2014, 8, 150–156. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, L.; Gao, L.; Wang, Z.; Dai, K.; Wu, S.; Mu, X. An Energy Harvester Coupled with a Triboelectric Mechanism and Electrostatic Mechanism for Biomechanical Energy Harvesting. Nanomaterials 2022, 12, 933. https://doi.org/10.3390/nano12060933
Zhai L, Gao L, Wang Z, Dai K, Wu S, Mu X. An Energy Harvester Coupled with a Triboelectric Mechanism and Electrostatic Mechanism for Biomechanical Energy Harvesting. Nanomaterials. 2022; 12(6):933. https://doi.org/10.3390/nano12060933
Chicago/Turabian StyleZhai, Lei, Lingxiao Gao, Ziying Wang, Kejie Dai, Shuai Wu, and Xiaojing Mu. 2022. "An Energy Harvester Coupled with a Triboelectric Mechanism and Electrostatic Mechanism for Biomechanical Energy Harvesting" Nanomaterials 12, no. 6: 933. https://doi.org/10.3390/nano12060933
APA StyleZhai, L., Gao, L., Wang, Z., Dai, K., Wu, S., & Mu, X. (2022). An Energy Harvester Coupled with a Triboelectric Mechanism and Electrostatic Mechanism for Biomechanical Energy Harvesting. Nanomaterials, 12(6), 933. https://doi.org/10.3390/nano12060933