

A High-Performance Strain Sensor for the Detection of Human Motion and Subtle Strain Based on Liquid Metal Microwire

Abstract
1. Introduction
2. Materials and Methods
2.1. Materials and Instruments
2.2. Synthesis of LMNPs
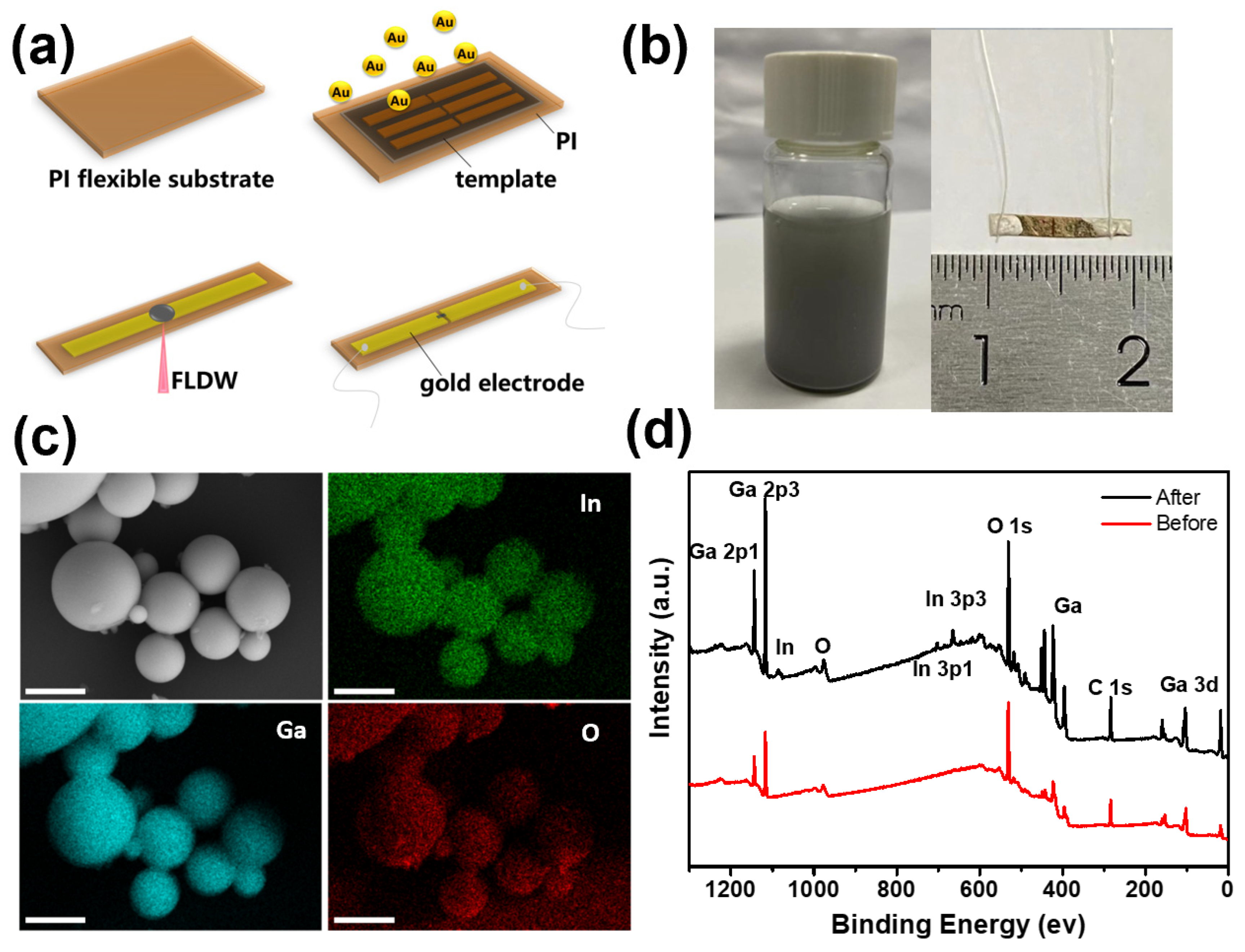
2.3. Fabrication Process and Test Instruments
3. Results and Discussion
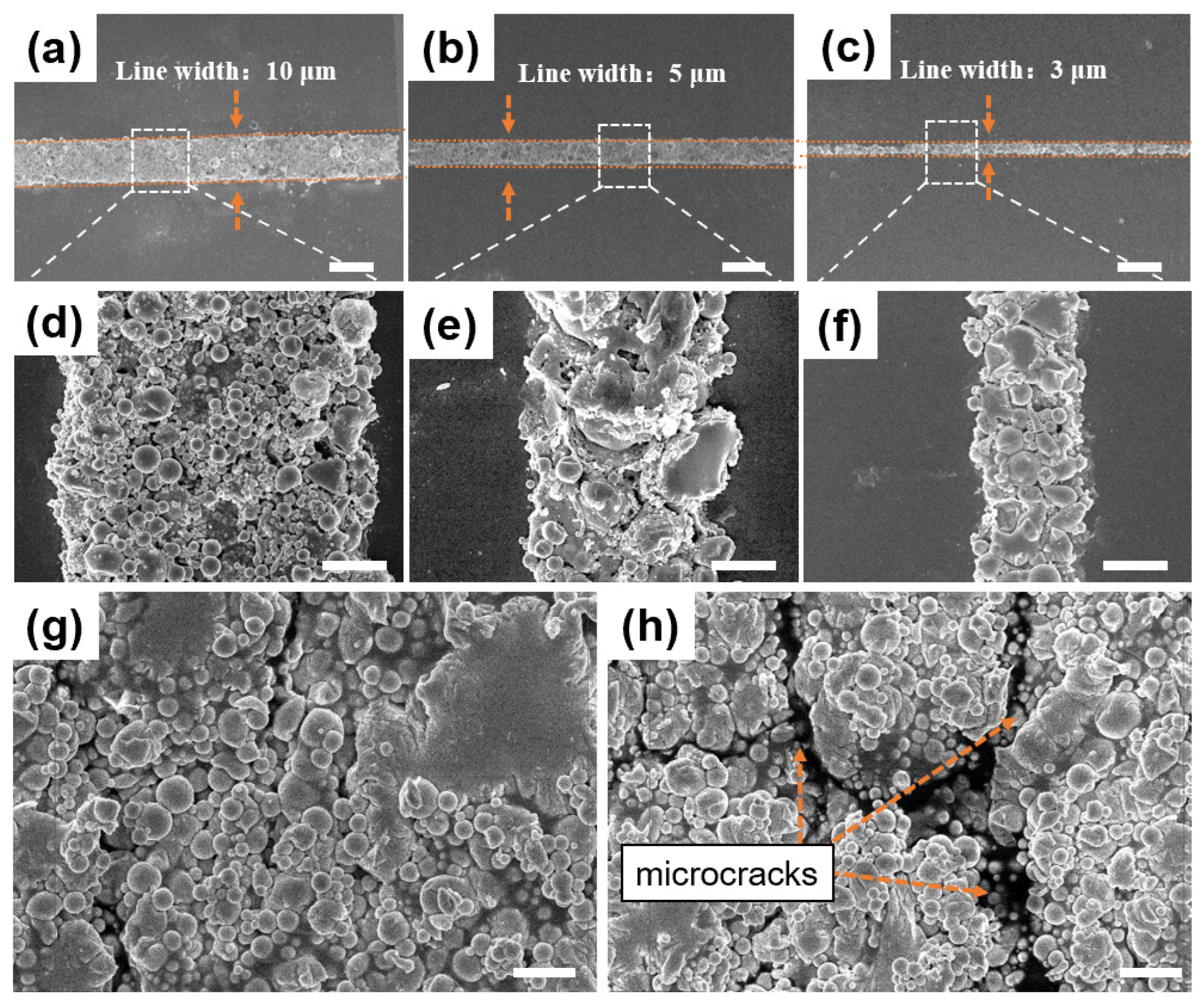
3.1. Characterization of the Strain Sensor Based on LMNPs
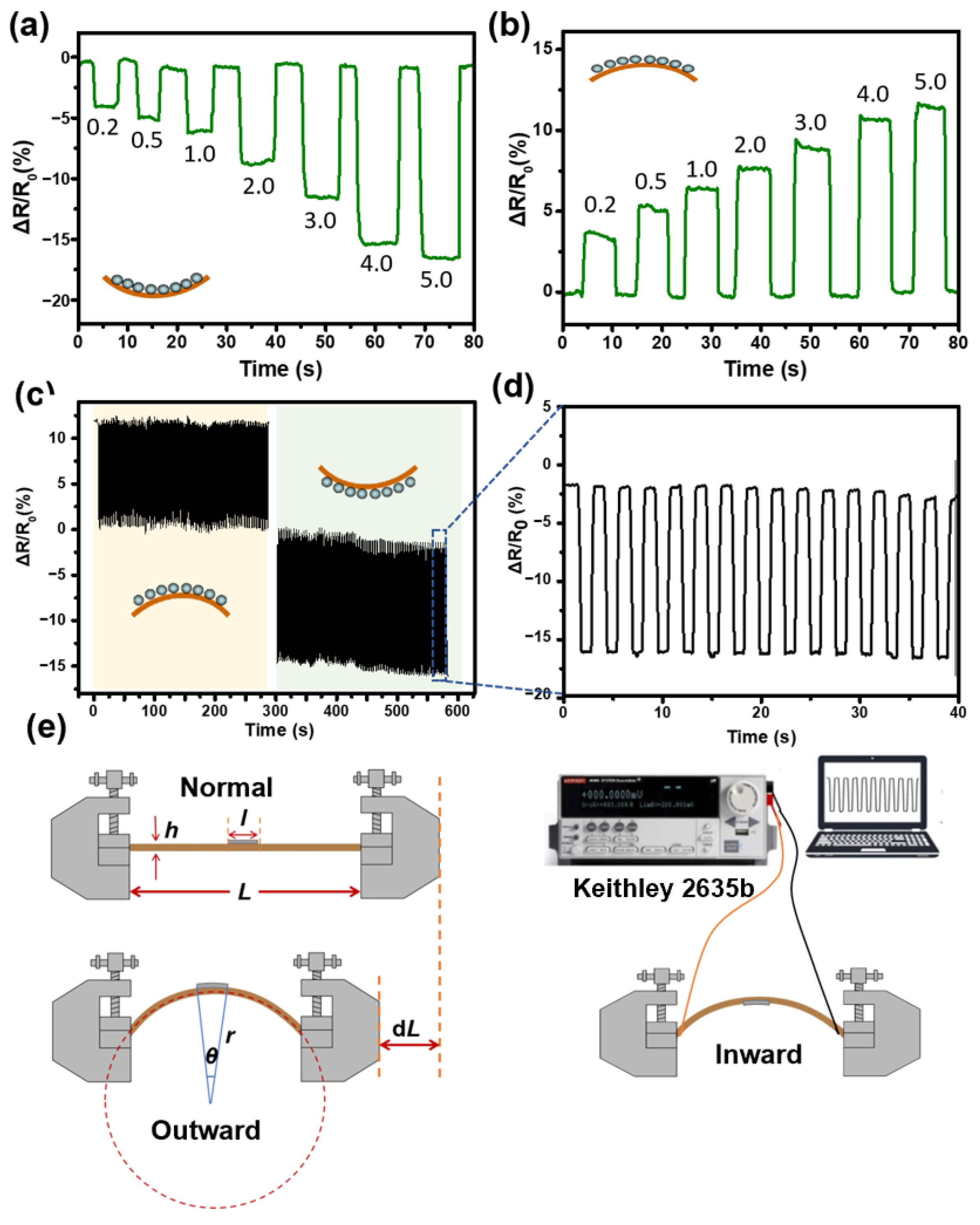
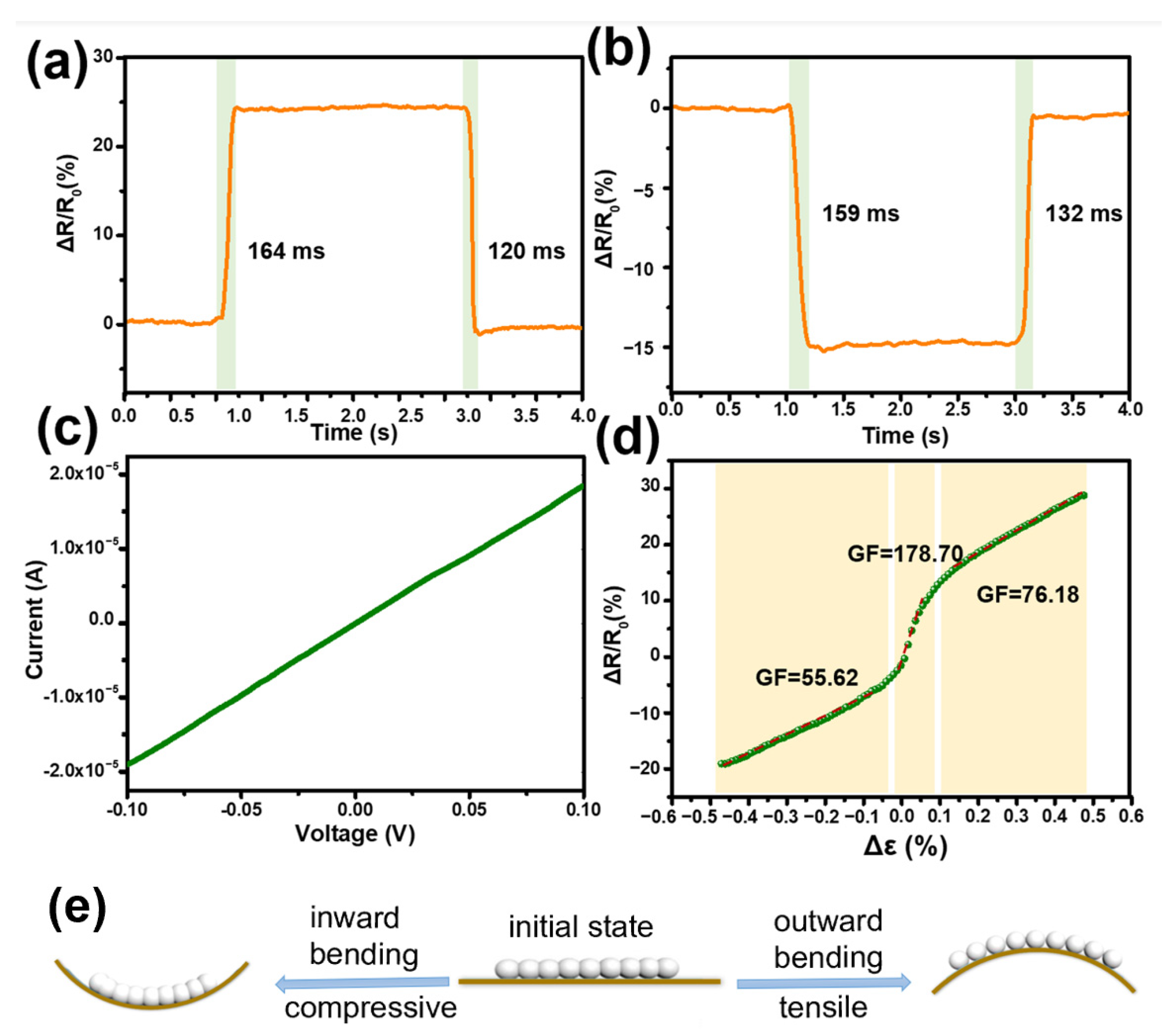
3.2. Strain Sensitivity Investigation of the Strain Sensor Based on LMNPs
3.3. Strain Sensor Based on LMNPs for Human Motion Detection
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, L.; Zhang, Z.; Gao, F.; Zhao, X.; Xun, X.; Kang, Z.; Liao, Q.; Zhang, Y. Self-powered ultrasensitive pulse sensors for noninvasive multi-indicators cardiovascular monitoring. Nano Energy 2021, 81, 105614. [Google Scholar] [CrossRef]
- Li, L.; Sheng, S.; Liu, Y.; Wen, J.; Song, C.; Chen, Z.; Xu, W.; Zhang, Z.; Fan, W.; Chen, C.; et al. Automatic and continuous blood pressure monitoring via an optical-fiber-sensor-assisted smartwatch. PhotoniX 2023, 4, 21. [Google Scholar] [CrossRef]
- Qiu, A.; Li, P.; Yang, Z.; Yao, Y.; Lee, I.; Ma, J. A path beyond metal and silicon:Polymer/nanomaterial composites for stretchable strain sensors. Adv. Funct. Mater. 2019, 29, 1806306. [Google Scholar] [CrossRef]
- Liu, H.; Li, Q.; Zhang, S.; Yin, R.; Liu, X.; He, Y.; Dai, K.; Shan, C.; Guo, J.; Liu, C.; et al. Electrically conductive polymer composites for smart flexible strain sensors: A critical review. J. Mater. Chem. C 2018, 6, 12121–12141. [Google Scholar] [CrossRef]
- Miranda, B.; Rea, I.; Dardano, P.; De Stefano, L.; Forestiere, C. Recent advances in the fabrication and functionalization of flexible optical biosensors: Toward smart life-sciences applications. Biosensors 2021, 11, 107. [Google Scholar] [CrossRef] [PubMed]
- Miranda, B.; Moretta, R.; Dardano, P.; Rea, I.; Forestiere, C.; De Stefano, L. H3 (hydrogel-based, high-sensitivity, hybrid) plasmonic transducers for biomolecular interactions monitoring. Adv. Mater. Technol. 2022, 7, 2101425. [Google Scholar] [CrossRef]
- Wang, T.; Yang, H.; Qi, D.; Liu, Z.; Cai, P.; Zhang, H.; Chen, X. Mechano-based transductive sensing for wearable healthcare. Small 2018, 14, 1702933. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.-U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Yang, T.; Li, X.; Jiang, X.; Lin, S.; Lao, J.; Shi, J.; Zhen, Z.; Li, Z.; Zhu, H. Structural engineering of gold thin films with channel cracks for ultrasensitive strain sensing. Mater. Horiz. 2016, 3, 248–255. [Google Scholar] [CrossRef]
- Mohammed Ali, M.; Maddipatla, D.; Narakathu, B.B.; Chlaihawi, A.A.; Emamian, S.; Janabi, F.; Bazuin, B.J.; Atashbar, M.Z. Printed strain sensor based on silver nanowire/silver flake composite on flexible and stretchable tpu substrate. Sens. Actuators A Phys. 2018, 274, 109–115. [Google Scholar] [CrossRef]
- Zhan, Z.; Sun, Q.; Tang, C.; Wu, H.; Lu, Y. Ultra-highly sensitive and self-healing flexible strain sensor with a wide measuring range based on a bilayer structure. Sens. Actuators A Phys. 2023, 360, 114510. [Google Scholar] [CrossRef]
- Zhou, C.-G.; Sun, W.-J.; Jia, L.-C.; Xu, L.; Dai, K.; Yan, D.-X.; Li, Z.-M. Highly stretchable and sensitive strain sensor with porous segregated conductive network. ACS Appl. Mater. Interfaces 2019, 11, 37094–37102. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Guo, F.; Cao, P.; Liu, J.; Li, D.; Wu, J.; Wang, N.; Su, Y.; Zhao, Y. Winding-locked carbon nanotubes/polymer nanofibers helical yarn for ultrastretchable conductor and strain sensor. ACS Nano 2020, 14, 3442–3450. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Hao, J.; Huang, Z.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. Flexible electrically resistive-type strain sensors based on reduced graphene oxide-decorated electrospun polymer fibrous mats for human motion monitoring. Carbon 2018, 126, 360–371. [Google Scholar] [CrossRef]
- Lau, K.Y.; Qiu, J. Broad applications of sensors based on laser-scribed graphene. Light Sci. Appl. 2023, 12, 168. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Zhang, J.; Qin, M.; Zhang, J.; Zou, X.; Weng, X. A flexible piezoresistive strain sensor based on black phosphorus/gold nanocomposites interspersed sponge for motion sensing. Sens. Actuators A Phys. 2023, 356, 114359. [Google Scholar] [CrossRef]
- Ho, M.D.; Ling, Y.; Yap, L.W.; Wang, Y.; Dong, D.; Zhao, Y.; Cheng, W. Percolating network of ultrathin gold nanowires and silver nanowires toward “invisible” wearable sensors for detecting emotional expression and apexcardiogram. Adv. Funct. Mater. 2017, 27, 1700845. [Google Scholar] [CrossRef]
- Lan, L.; Yin, T.; Jiang, C.; Li, X.; Yao, Y.; Wang, Z.; Qu, S.; Ye, Z.; Ping, J.; Ying, Y. Highly conductive 1d-2d composite film for skin-mountable strain sensor and stretchable triboelectric nanogenerator. Nano Energy 2019, 62, 319–328. [Google Scholar] [CrossRef]
- Tang, L.; Yang, S.; Zhang, K.; Jiang, X. Skin electronics from biocompatible in situ welding enabled by intrinsically sticky conductors. Adv. Sci. 2022, 9, 2202043. [Google Scholar] [CrossRef]
- Zhang, S.-H.; Wang, F.-X.; Li, J.-J.; Peng, H.-D.; Yan, J.-H.; Pan, G.-B. Wearable wide-range strain sensors based on ionic liquids and monitoring of human activities. Sensors 2017, 17, 2621. [Google Scholar] [CrossRef]
- Seyedin, M.Z.; Razal, J.M.; Innis, P.C.; Wallace, G.G. Strain-responsive polyurethane/pedot:Pss elastomeric composite fibers with high electrical conductivity. Adv. Funct. Mater. 2014, 24, 2957–2966. [Google Scholar] [CrossRef]
- Xs, A.; Bo, Y.B.; Lei, S.A.; Wei, R.A.; Jing, L. Liquid metal enabled injectable biomedical technologies and applications. Appl. Mater. Today 2020, 20, 100722. [Google Scholar]
- Andreev, Y.A.; Matt, G.E.; Brabec, C.J.; Sitter, H.; Badt, D.; Seyringer, H.; Sariciftci, N.S. Epidermal electronics. Science 2011, 333, 838–843. [Google Scholar]
- Li, J.; Yan, J.; Jiang, L.; Yu, J.; Guo, H.; Qu, L. Nanoscale multi-beam lithography of photonic crystals with ultrafast laser. Light Sci. Appl. 2023, 12, 164. [Google Scholar] [CrossRef] [PubMed]
- Yao, S.; Zhu, Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. Nanoscale 2014, 6, 2345–2352. [Google Scholar] [CrossRef] [PubMed]
- Dai, Y.-Z.; Liang, S.-Y.; Lv, C.; Wang, G.; Xia, H.; Zhang, T.; Sun, H.-B. Controllably fabricated single microwires from Pd-WO3•xH2O nanoparticles by femtosecond laser for faster response ammonia sensors at room temperature. Sens. Actuators B Chem. 2020, 316, 128122. [Google Scholar] [CrossRef]
- Zhu, H.; Dai, Y.-Z.; Sun, X.-C.; Xia, H. A fine single pd microwire h2 sensor fabricated by using a femtosecond laser for a wide detection range at room temperature. Nanoscale Adv. 2022, 4, 4162–4168. [Google Scholar] [CrossRef] [PubMed]
- Tang, N.; Zhou, C.; Qu, D.; Fang, Y.; Zheng, Y.; Hu, W.; Jin, K.; Wu, W.; Duan, X.; Haick, H. A highly aligned nanowire-based strain sensor for ultrasensitive monitoring of subtle human motion. Small 2020, 16, 2001363. [Google Scholar] [CrossRef]
- Han, Z.; Liu, L.; Zhang, J.; Han, Q.; Wang, K.; Song, H.; Wang, Z.; Jiao, Z.; Niu, S.; Ren, L. High-performance flexible strain sensor with bio-inspired crack arrays. Nanoscale 2018, 10, 15178–15186. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly stretchable and sensitive strain sensor based on silver nanowire-elastomer nanocomposite. Acs Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef]
- Han, D.-D.; Zhang, Y.-L.; Liu, Y.; Liu, Y.-Q.; Jiang, H.-B.; Han, B.; Fu, X.-Y.; Ding, H.; Xu, H.-L.; Sun, H.-B. Bioinspired graphene actuators prepared by unilateral uv irradiation of graphene oxide papers. Adv. Funct. Mater. 2015, 25, 4548–4557. [Google Scholar] [CrossRef]
- Xu, X.-L.; Li, S.-X.; Yang, Y.; Sun, X.-C.; Xia, H. High-performance strain sensor for detection of human motion and subtle strain by facile fabrication. Measurement 2022, 189, 110658. [Google Scholar] [CrossRef]
- Davoodi, E.; Montazerian, H.; Haghniaz, R.; Rashidi, A.; Ahadian, S.; Sheikhi, A.; Chen, J.; Khademhosseini, A.; Milani, A.S.; Hoorfar, M.; et al. 3d-printed ultra-robust surface-doped porous silicone sensors for wearable biomonitoring. ACS Nano 2020, 14, 1520–1532. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Methods | GF | Sensing | Ref. |
|---|---|---|---|---|
| MXene/CNT | Layer-by-layer spraycoating | 4.35 | 0.1–0.6% | [31] |
| 4 nm AuNPs | Layer-by-layer spincoating and contact | 14 | 0–0.12% | [13] |
| Carbon Black and carboxymethyl cellulose | Dip-coating | 4.3 | 0–0.6% | [13] |
| AgNW/MoS2 | Mix two materials | 5.96 | 0–3 | [18] |
| AuNP thin film | Dip-coating | 19.94 | 0.1–0.5% | [32] |
| Graphene | 3D-printed | 10 | 2–10% | [33] |
| LMNPs | FsLDW | 76.18 | 0–0.48% | This work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Sun, Z.; Wang, X.; Xia, H. A High-Performance Strain Sensor for the Detection of Human Motion and Subtle Strain Based on Liquid Metal Microwire. Nanomaterials 2024, 14, 231. https://doi.org/10.3390/nano14020231
Zhu H, Sun Z, Wang X, Xia H. A High-Performance Strain Sensor for the Detection of Human Motion and Subtle Strain Based on Liquid Metal Microwire. Nanomaterials. 2024; 14(2):231. https://doi.org/10.3390/nano14020231
Chicago/Turabian StyleZhu, He, Zheng Sun, Xin Wang, and Hong Xia. 2024. "A High-Performance Strain Sensor for the Detection of Human Motion and Subtle Strain Based on Liquid Metal Microwire" Nanomaterials 14, no. 2: 231. https://doi.org/10.3390/nano14020231
APA StyleZhu, H., Sun, Z., Wang, X., & Xia, H. (2024). A High-Performance Strain Sensor for the Detection of Human Motion and Subtle Strain Based on Liquid Metal Microwire. Nanomaterials, 14(2), 231. https://doi.org/10.3390/nano14020231