
Stiffness Modulation in Flexible Rotational Triboelectric Nanogenerators for Dual Enhancement of Power and Reliability

Abstract
:1. Introduction
2. Methods
2.1. Fabrication of Rotors and Stators
2.2. Assembly of FR-TENG Devices
2.3. Characterization and Measurements
3. Results and Discussion
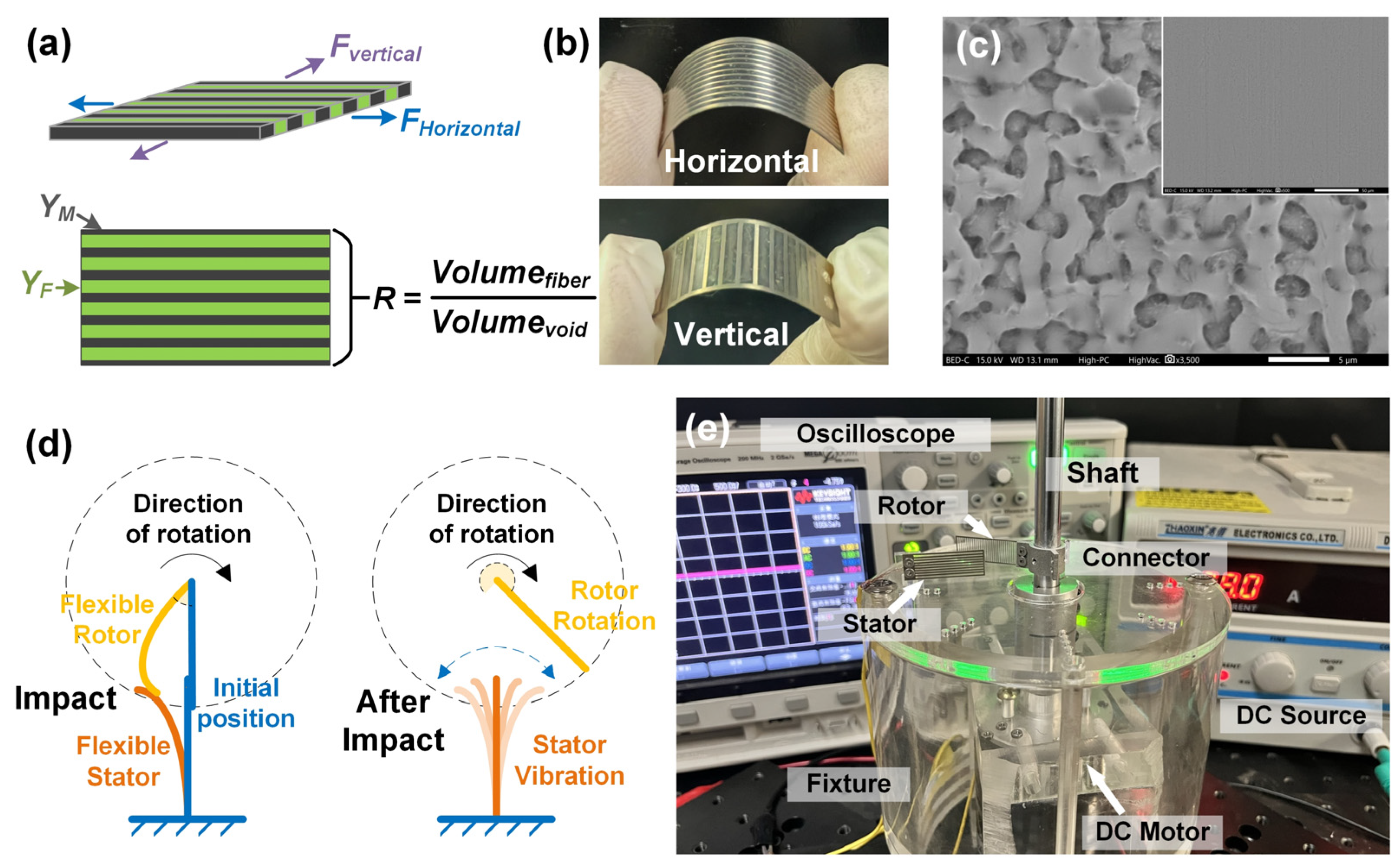
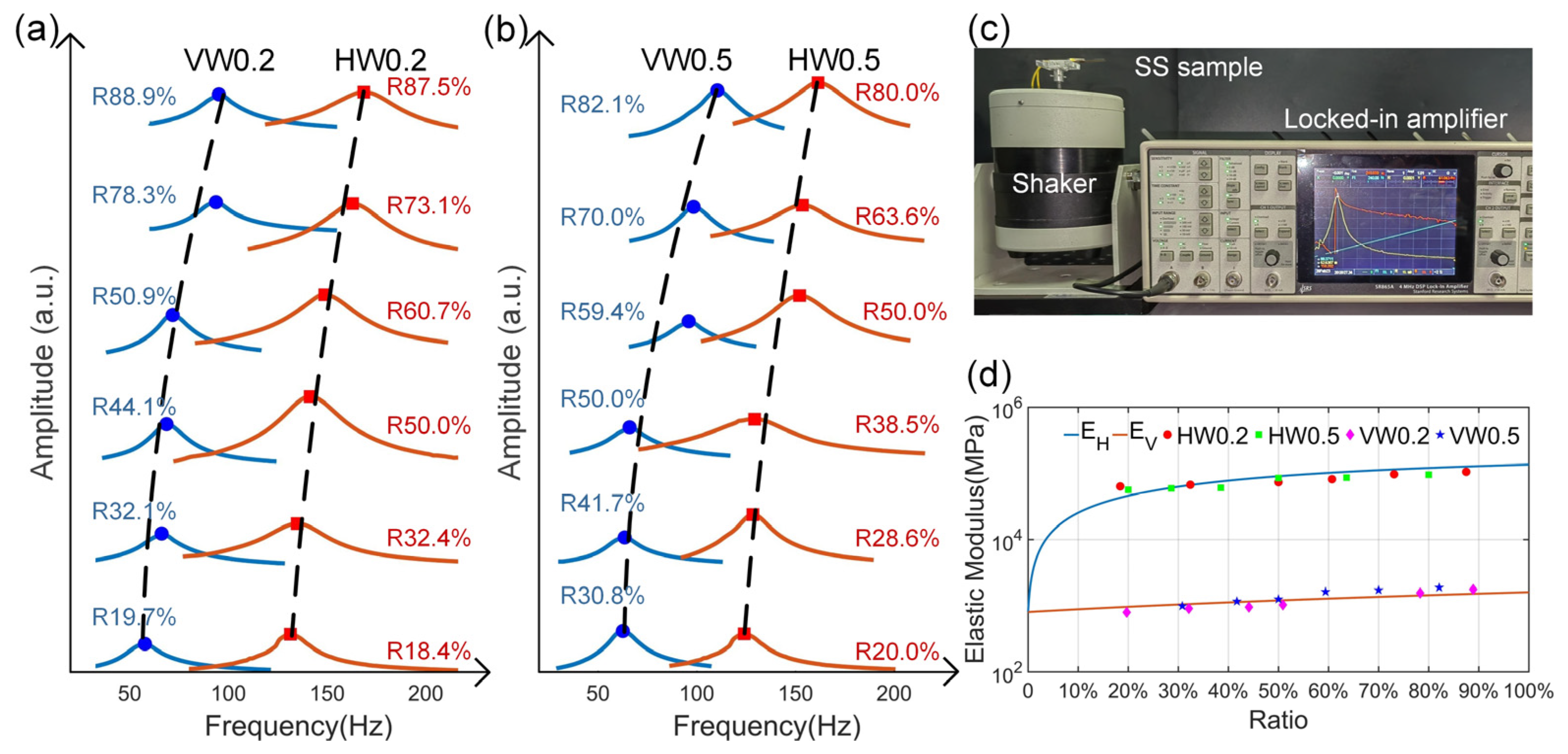
3.1. Design and Implementation
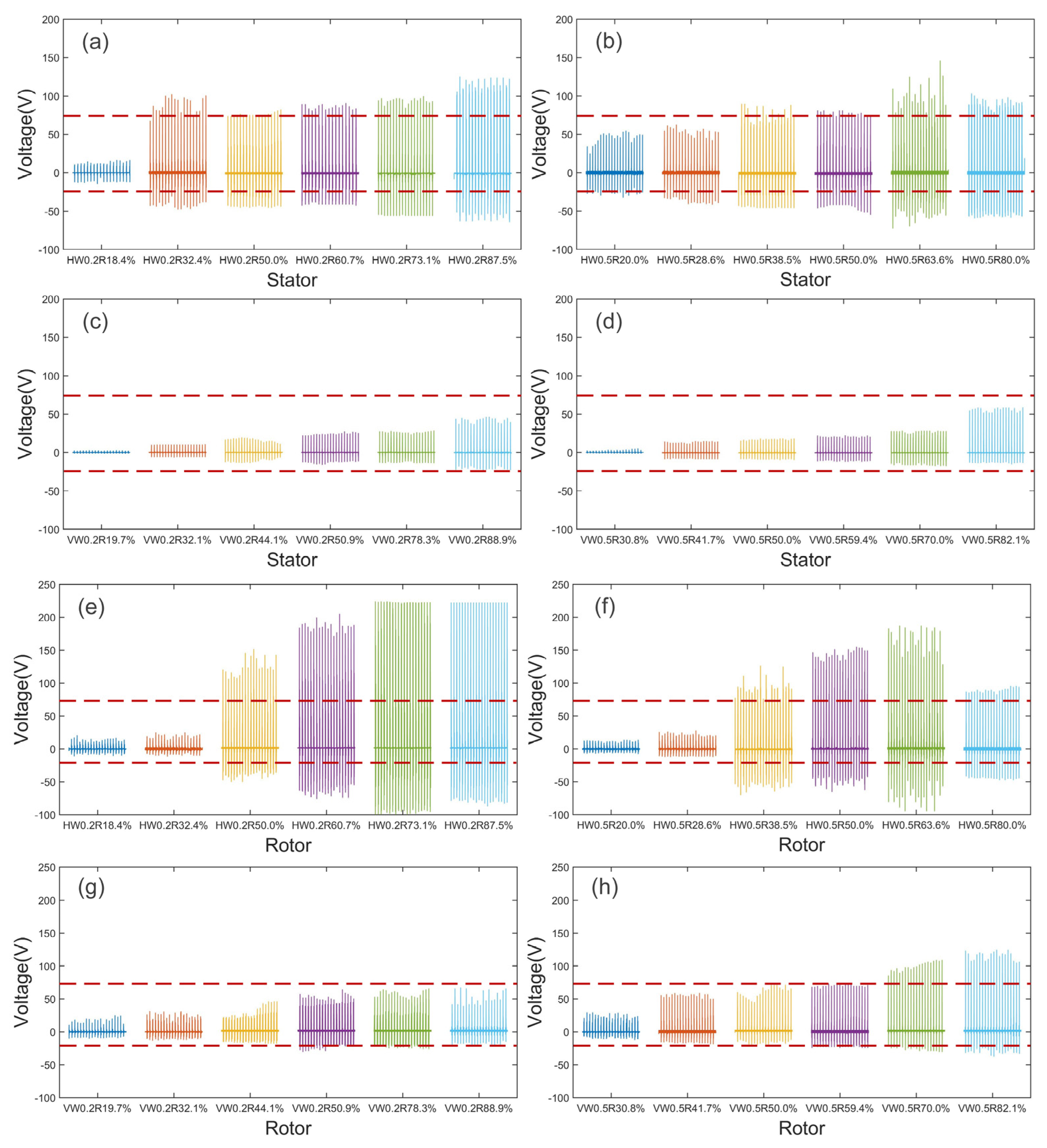
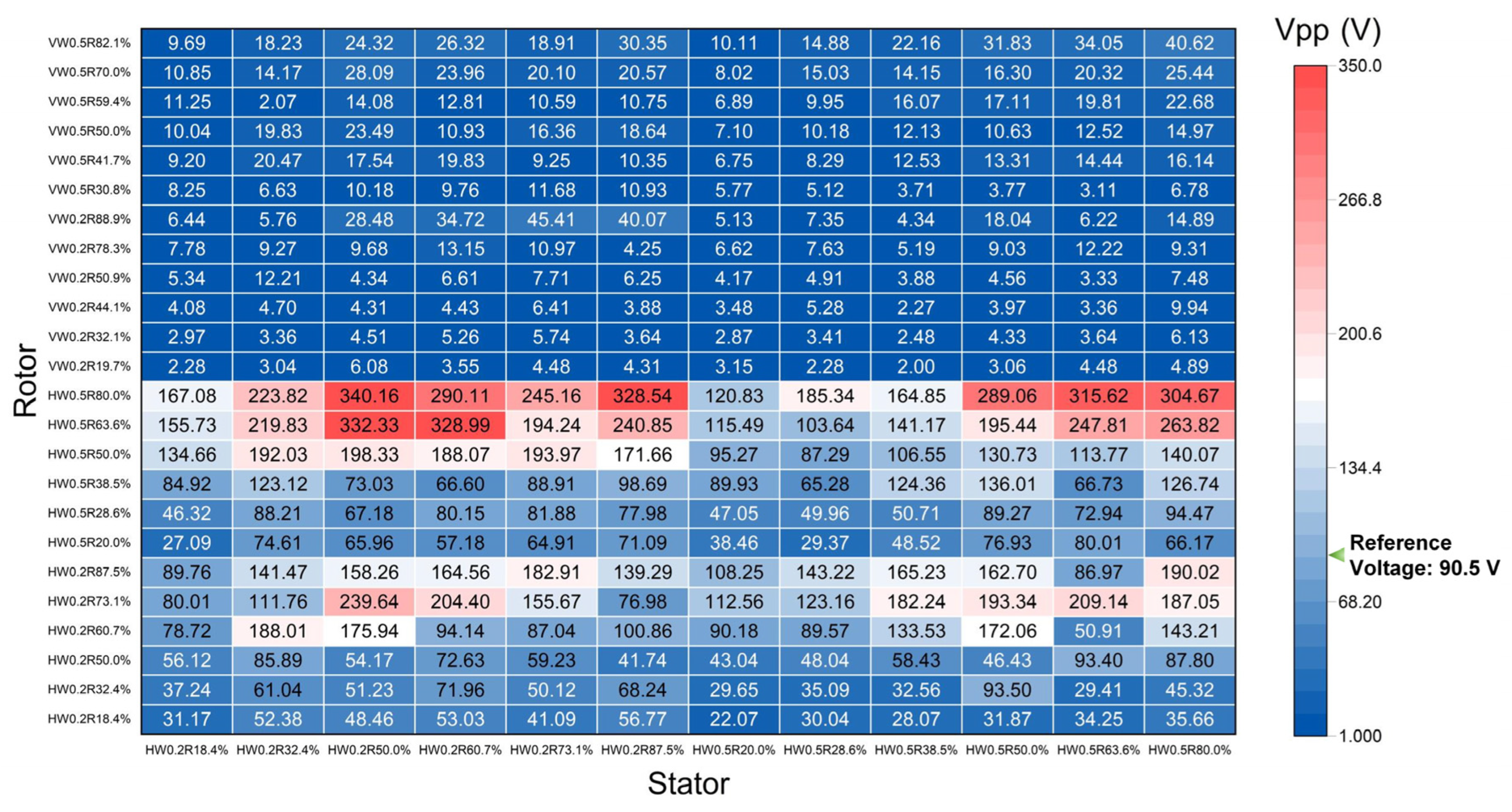
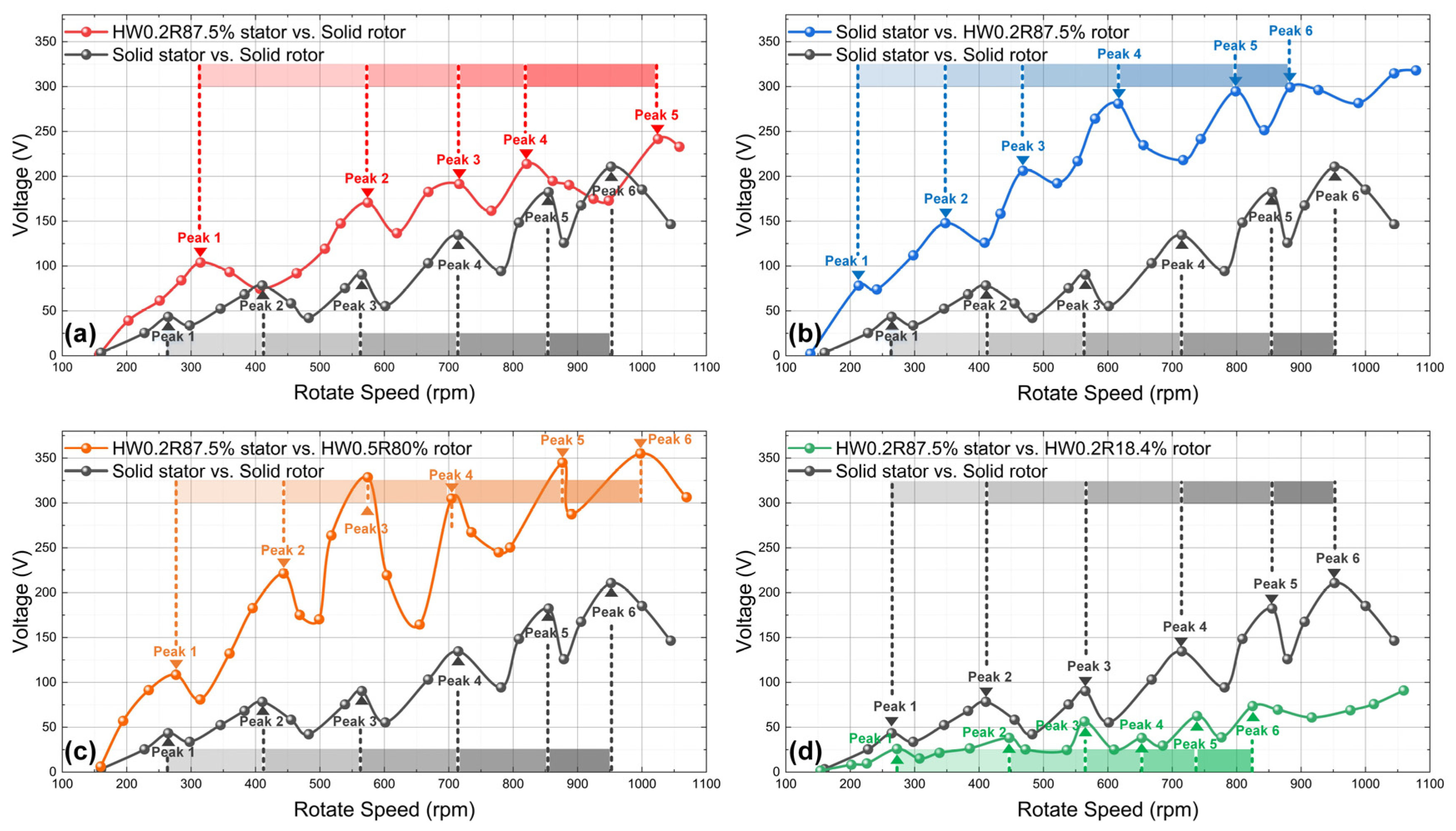
3.2. Electrical Output Characteristics
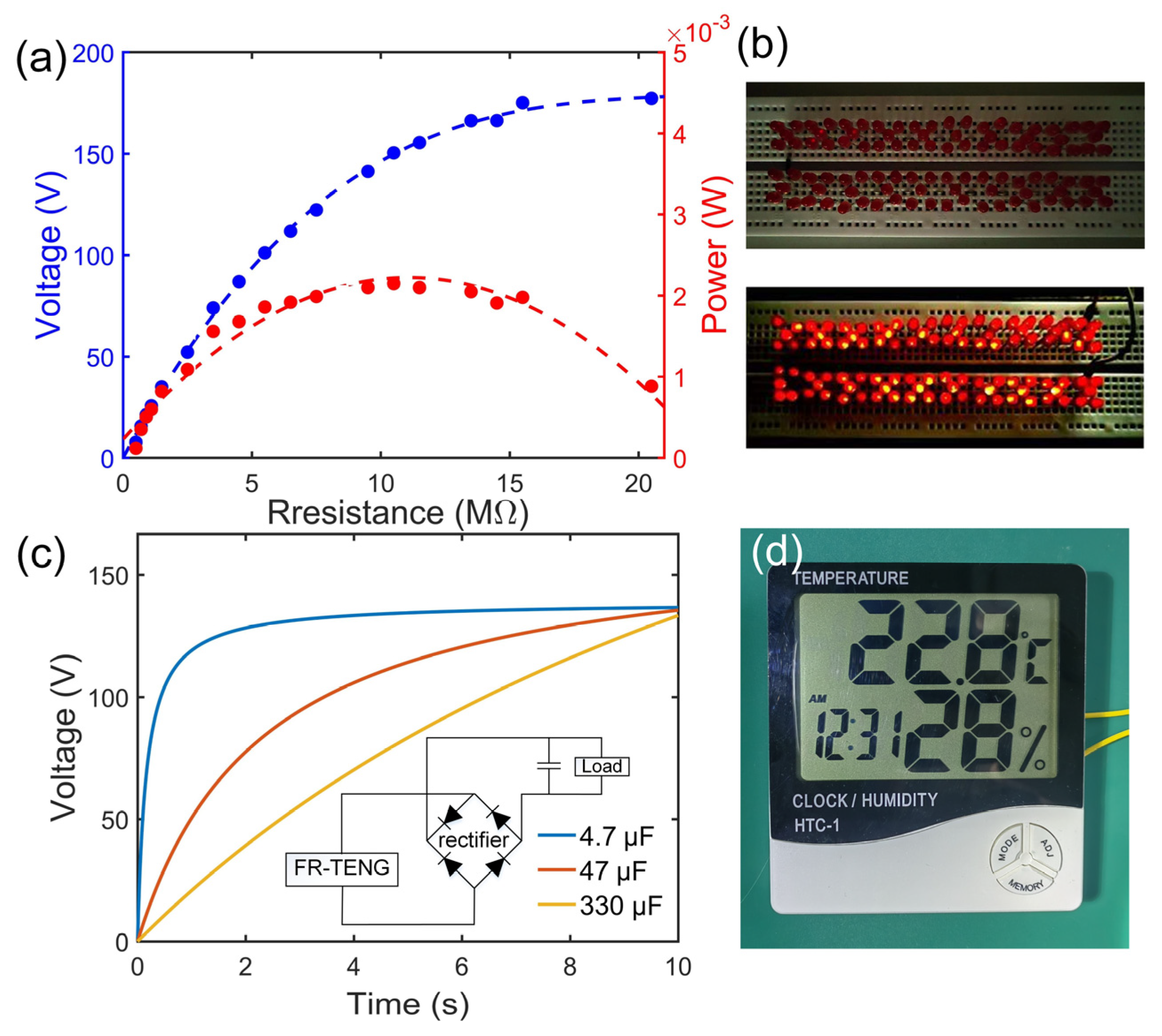
3.3. Application
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, D.; Zhang, D.; Tang, M.; Zhang, H.; Chen, F.; Wang, T.; Li, Z.; Zhao, P. Rotating Triboelectric-Electromagnetic Nanogenerator Driven by Tires for Self-Powered MXene-Based Flexible Wearable Electronics. Chem. Eng. J. 2022, 446, 136914. [Google Scholar] [CrossRef]
- Bai, S.; Cui, J.; Zheng, Y.; Li, G.; Liu, T.; Liu, Y.; Hao, C.; Xue, C. Electromagnetic-Triboelectric Energy Harvester Based on Vibration-to-Rotation Conversion for Human Motion Energy Exploitation. Appl. Energy 2023, 329, 120292. [Google Scholar] [CrossRef]
- Wang, N.; Wang, X.-X.; Yan, K.; Song, W.; Fan, Z.; Yu, M.; Long, Y.-Z. Anisotropic Triboelectric Nanogenerator Based on Ordered Electrospinning. ACS Appl. Mater. Interfaces 2020, 12, 46205–46211. [Google Scholar] [CrossRef]
- He, L.; Zhang, C.; Zhang, B.; Yang, O.; Yuan, W.; Zhou, L.; Zhao, Z.; Wu, Z.; Wang, J.; Wang, Z.L. A Dual-Mode Triboelectric Nanogenerator for Wind Energy Harvesting and Self-Powered Wind Speed Monitoring. ACS Nano 2022, 16, 6244–6254. [Google Scholar] [CrossRef]
- Rui, P.; Li, D.; Zi, Z.; Zhao, Y. Highly Durable Compact Sleeve Triboelectric–Electromagnetic Hybrid Nanogenerator for Broadband Triggered Energy Harvesting and Active Wind Speed Sensing. Adv. Mater. Technol. 2023, 8, 2200860. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, S.; Li, W.; Gao, Q.; Zhao, D.; Wang, Z.L.; Cheng, T. Self-Powered Sensing for Smart Agriculture by Electromagnetic–Triboelectric Hybrid Generator. ACS Nano 2021, 15, 20278–20286. [Google Scholar] [CrossRef]
- Han, J.; Liu, Y.; Feng, Y.; Jiang, T.; Wang, Z.L. Achieving a Large Driving Force on Triboelectric Nanogenerator by Wave-Driven Linkage Mechanism for Harvesting Blue Energy toward Marine Environment Monitoring. Adv. Energy Mater. 2023, 13, 2203219. [Google Scholar] [CrossRef]
- Xi, Y.; Guo, H.; Zi, Y.; Li, X.; Wang, J.; Deng, J.; Li, S.; Hu, C.; Cao, X.; Wang, Z.L. Multifunctional TENG for Blue Energy Scavenging and Self-Powered Wind-Speed Sensor. Adv. Energy Mater. 2017, 7, 1602397. [Google Scholar] [CrossRef]
- Li, X.; Tao, J.; Wang, X.; Zhu, J.; Pan, C.; Wang, Z.L. Networks of High Performance Triboelectric Nanogenerators Based on Liquid–Solid Interface Contact Electrification for Harvesting Low-Frequency Blue Energy. Adv. Energy Mater. 2018, 8, 1800705. [Google Scholar] [CrossRef]
- Zhu, G.; Chen, J.; Zhang, T.; Jing, Q.; Wang, Z.L. Radial-Arrayed Rotary Electrification for High Performance Triboelectric Generator. Nat. Commun. 2014, 5, 3426. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Su, J.; Wei, X.; Wang, M.; Tian, M.; Jiang, T.; Wang, Z.L. Self-Powered Electrochemical Oxidation of 4-Aminoazobenzene Driven by a Triboelectric Nanogenerator. ACS Nano 2017, 11, 770–778. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, Y.; Tian, M.; Chen, C.; Jia, X.; Gao, S. Sustainable Self-Powered Electro-Fenton Degradation of Organic Pollutants in Wastewater Using Carbon Catalyst with Controllable Pore Activated by EDTA-2Na. Nano Energy 2019, 59, 346–353. [Google Scholar] [CrossRef]
- Yong, S.; Wang, J.; Yang, L.; Wang, H.; Luo, H.; Liao, R.; Wang, Z.L. Auto-Switching Self-Powered System for Efficient Broad-Band Wind Energy Harvesting Based on Dual-Rotation Shaft Triboelectric Nanogenerator. Adv. Energy Mater. 2021, 11, 2101194. [Google Scholar] [CrossRef]
- Chen, J.; Wei, X.; Wang, B.; Li, R.; Sun, Y.; Peng, Y.; Wu, Z.; Wang, P.; Wang, Z.L. Design Optimization of Soft-Contact Freestanding Rotary Triboelectric Nanogenerator for High-Output Performance. Adv. Energy Mater. 2021, 11, 2102106. [Google Scholar] [CrossRef]
- Zhou, H.; Liu, G.; Gao, Y.; Wang, Z.; Qin, Y.; Wang, Y.; Lin, Y.; Xie, Y.; Chen, Y.; Zhang, C. Dual Mode Rotary Triboelectric Nanogenerator for Collecting Kinetic Energy from Bicycle Brake. Adv. Energy Sustain. Res. 2021, 2, 2000113. [Google Scholar] [CrossRef]
- Wang, X.; Yin, G.; Sun, T.; Rasool, G.; Abbas, K. Triboelectric Nanogenerator with a Rotational Freestanding Mode for Multi-Directional Vibration Energy Harvesting. ACS Appl. Energy Mater. 2023, 6, 7607–7619. [Google Scholar] [CrossRef]
- Wang, Z.; Bu, T.; Li, Y.; Wei, D.; Tao, B.; Yin, Z.; Zhang, C.; Wu, H. Multidimensional Force Sensors Based on Triboelectric Nanogenerators for Electronic Skin. ACS Appl. Mater. Interfaces 2021, 13, 56320–56328. [Google Scholar] [CrossRef]
- Ma, J.; Zhu, J.; Ma, P.; Jie, Y.; Wang, Z.L.; Cao, X. Fish Bladder Film-Based Triboelectric Nanogenerator for Noncontact Position Monitoring. ACS Energy Lett. 2020, 5, 3005–3011. [Google Scholar] [CrossRef]
- Song, L.; Zhang, Z.; Xun, X.; Xu, L.; Gao, F.; Zhao, X.; Kang, Z.; Liao, Q.; Zhang, Y. Fully Organic Self-Powered Electronic Skin with Multifunctional and Highly Robust Sensing Capability. Research 2021, 2021, 9801832. [Google Scholar] [CrossRef]
- Yang, Z.W.; Pang, Y.; Zhang, L.; Lu, C.; Chen, J.; Zhou, T.; Zhang, C.; Wang, Z.L. Tribotronic Transistor Array as an Active Tactile Sensing System. ACS Nano 2016, 10, 10912–10920. [Google Scholar] [CrossRef]
- Rehman, H.M.M.U.; Prasanna, A.P.S.; Rehman, M.M.; Khan, M.; Kim, S.-J.; Kim, W.Y. Edible Rice Paper-Based Multifunctional Humidity Sensor Powered by Triboelectricity. Sustain. Mater. Technol. 2023, 36, e00596. [Google Scholar] [CrossRef]
- Xuan, N.; Song, C.; Cheng, G.; Du, Z. Advanced Triboelectric Nanogenerator Based Self-Powered Electrochemical System. Chem. Eng. J. 2024, 481, 148640. [Google Scholar] [CrossRef]
- Xiong, Q.; Yang, Z.; Zhang, X. Flexible Triboelectric Nanogenerator Based on Silk Fibroin-Modified Carbon Nanotube Arrays. Chem. Eng. J. 2024, 482, 148986. [Google Scholar] [CrossRef]
- Yuan, F.; Liu, S.; Zhou, J.; Wang, S.; Wang, Y.; Xuan, S.; Gong, X. Smart Touchless Triboelectric Nanogenerator towards Safeguard and 3D Morphological Awareness. Nano Energy 2021, 86, 106071. [Google Scholar] [CrossRef]
- Li, W.; Liu, Y.; Wang, S.; Li, W.; Liu, G.; Zhao, J.; Zhang, X.; Zhang, C. Vibrational Triboelectric Nanogenerator-Based Multinode Self-Powered Sensor Network for Machine Fault Detection. IEEE/ASME Trans. Mechatron. 2020, 25, 2188–2196. [Google Scholar] [CrossRef]
- Zhou, Q.; Huang, H.; Wu, C.; Wen, G.; Liu, B. A Self-Powered Sensor for Drill Pipe Capable of Monitoring Rotation Speed and Direction Based on Triboelectric Nanogenerator. Rev. Sci. Instrum. 2021, 92, 055006. [Google Scholar] [CrossRef]
- Liu, J.; Huang, H.; Zhou, Q.; Wu, C. Self-Powered Downhole Drilling Tools Vibration Sensor Based on Triboelectric Nanogenerator. IEEE Sens. J. 2022, 22, 2250–2258. [Google Scholar] [CrossRef]
- Du, T.; Dong, F.; Xu, R.; Zou, Y.; Wang, H.; Jiang, X.; Xi, Z.; Yuan, H.; Zhang, Y.; Sun, P.; et al. A Drill Pipe-Embedded Vibration Energy Harvester and Self-Powered Sensor Based on Annular Type Triboelectric Nanogenerator for Measurement While Drilling System. Adv. Mater. Technol. 2022, 7, 2200003. [Google Scholar] [CrossRef]
- Rahman, M.T.; Salauddin, M.; Maharjan, P.; Rasel, M.S.; Cho, H.; Park, J.Y. Natural Wind-Driven Ultra-Compact and Highly Efficient Hybridized Nanogenerator for Self-Sustained Wireless Environmental Monitoring System. Nano Energy 2019, 57, 256–268. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, Q.; Zhang, W.; Du, X.; Zhang, Y.; Gong, S.; Ren, K.; Sun, Q.; Wang, Z.L. Hybrid Piezo/Triboelectric Nanogenerator for Highly Efficient and Stable Rotation Energy Harvesting. Nano Energy 2019, 57, 440–449. [Google Scholar] [CrossRef]
- Liu, S.; Liu, Y.; Chen, Y.; Wang, S.; Men, C.; Gao, S. Novel 3D Printed Vortex-like Flexible Roller-Compacted Triboelectric Nanogenerator for Self-Powered Electrochemical Degradation of Organic Contaminants. ACS Appl. Mater. Interfaces 2022, 14, 17426–17433. [Google Scholar] [CrossRef]
- Zhang, N.; Qin, C.; Feng, T.; Li, J.; Yang, Z.; Sun, X.; Liang, E.; Mao, Y.; Wang, X. Non-Contact Cylindrical Rotating Triboelectric Nanogenerator for Harvesting Kinetic Energy from Hydraulics. Nano Res. 2020, 13, 1903–1907. [Google Scholar] [CrossRef]
- Men, C.; Liu, X.; Chen, Y.; Liu, S.; Wang, S.; Gao, S. Cotton-Assisted Dual Rotor-Stator Triboelectric Nanogenerator for Real-Time Monitoring of Crop Growth Environment. Nano Energy 2022, 101, 107578. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, M.; Huang, J.; Jiang, T.; Zou, J.; Wang, N.; Wang, Z.L. Inductor-Free Wireless Energy Delivery via Maxwell’s Displacement Current from an Electrodeless Triboelectric Nanogenerator. Adv. Mater. 2018, 30, 1704077. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Wang, S.; Niu, S.; Liu, C.; Xie, Y.; Wang, Z.L. Noncontact Free-Rotating Disk Triboelectric Nanogenerator as a Sustainable Energy Harvester and Self-Powered Mechanical Sensor. ACS Appl. Mater. Interfaces 2014, 6, 3031–3038. [Google Scholar] [CrossRef]
- Li, Z.B.; Li, H.Y.; Fan, Y.J.; Liu, L.; Chen, Y.H.; Zhang, C.; Zhu, G. Small-Sized, Lightweight, and Flexible Triboelectric Nanogenerator Enhanced by PTFE/PDMS Nanocomposite Electret. ACS Appl. Mater. Interfaces 2019, 11, 20370–20377. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Fei, Z.; Wu, Z.; Ye, Y.; Qi, Y.; Wang, J.; Zhao, L.; Zhang, C.; Zhang, Y.; Qin, G.; et al. Wearable Bending Wireless Sensing with Autonomous Wake-up by Piezoelectric and Triboelectric Hybrid Nanogenerator. Nano Energy 2023, 112, 108504. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Rigid/Flexible Interfaces | Frequency (Hz) | Peak Power Density (W/m2) |
|---|---|---|---|
| [1] | Rigid–rigid | 5.6 | 7.74 a |
| [5] | Rigid–rigid | 6.7 | 1.91 a |
| [7] | Rigid–rigid | 2 | 3.25 |
| [11] | Rigid–rigid | 10 | 2.28 |
| [26] | Rigid–flexible | 16.7 | 0.002 a |
| [27] | Rigid–flexible | 13 | 0.0004 a |
| [28] | Rigid–flexible | 4 | 0.58 a |
| [31] | Rigid–flexible | 5.4 | 4.4 |
| [17] | Flexible–flexible | 2.5 | 0.02 a |
| [29] | Flexible–flexible | 6 | 0.64 a |
| [36] | Flexible–flexible | 1 | 0.3 |
| [37] | Flexible–flexible | 3 | 0.8 |
| This Work | Flexible–flexible | 9.6 | 18.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Yin, A.; Zhou, Y.; Liu, T.; Liu, Q.; Ruan, W.; Bu, L. Stiffness Modulation in Flexible Rotational Triboelectric Nanogenerators for Dual Enhancement of Power and Reliability. Nanomaterials 2024, 14, 380. https://doi.org/10.3390/nano14040380
Li F, Yin A, Zhou Y, Liu T, Liu Q, Ruan W, Bu L. Stiffness Modulation in Flexible Rotational Triboelectric Nanogenerators for Dual Enhancement of Power and Reliability. Nanomaterials. 2024; 14(4):380. https://doi.org/10.3390/nano14040380
Chicago/Turabian StyleLi, Feng, Ao Yin, Yaao Zhou, Tao Liu, Qingqing Liu, Weijie Ruan, and Ling Bu. 2024. "Stiffness Modulation in Flexible Rotational Triboelectric Nanogenerators for Dual Enhancement of Power and Reliability" Nanomaterials 14, no. 4: 380. https://doi.org/10.3390/nano14040380