1. Introduction
Artificial intelligence and the use of robots in sorting could, in the future, make a significant contribution to the production of high-quality secondary raw materials from waste, in the sense of a recycling economy. Within the framework of a pilot study financed by the European Institute of Innovation and Technology (EIT) Climate-KIC, a European research consortium led by Ferrovial Services, NTU International and the Wuppertal Institute tested and evaluated such an AI solution. The robot was installed near Barcelona in an existing municipal waste sorting plant and tested on real municipal waste. The results have been evaluated with regard to sorting quality and purity of the relevant material flows, as well as initial estimates from a socio-economic perspective. The results allowed first conclusions to be drawn on both opportunities and risks of digital waste management: heterogeneous waste streams, such as household waste, still pose considerable challenges for robotic systems but also offer impressive learning curves for the development of sorting quality during the test phase. Overall, it is clear that technological solutions alone cannot make the leap to recycling management—but they are becoming an increasingly important part of a transformation of the entire value chain, from product design to disposal.
Transforming our current linear patterns of production and consumption towards a circular system, in which the value and quality of products, components and raw materials are optimally preserved at the end of their use phase, is increasingly seen as a key challenge for achieving sustainability goals as well as ensuring future industrial competitiveness [
1,
2,
3]. Against this background, the European Commission in 2015 initiated its Circular Economy Action Plan that indicated key action fields for this complex transformation. Although the circular economy clearly goes beyond a waste perspective, waste management will also have to be radically improved in order to recover high-quality secondary raw materials that can be re-fed into industrial processes. A particular challenge is the optimization of sorting plants for various types of municipal waste, which increasingly seem to be reaching their limits. It is therefore not surprising that the efficiency of waste sorting is stagnating, although at a high level. Current European municipal waste sorting plants are highly automated, thanks to equipment such as bag openers, trommels, ballistic separators, optical sorters, magnets, eddy current separators and pneumatic collection systems. However, some sorting tasks still have to be carried out manually (manual picking), e.g., the quality control of recovered material, and the manual sorting of oversize and waste streams that still contain a significant number of recyclables that are incinerated or disposed of if not properly sorted out. In both cases, these are tasks performed in low ergonomic work environments (noise, direct contact with waste, lifting and moving heavy objects) and performance decreases during the work shift. Key barriers to material recovery in sorting plants include sharp objects and odors, low ergonomics and efficiency losses [
4].
Against this background, the use of digitalization technologies such as robotics in waste management, and especially the sorting of municipal waste, will become decisive next steps in the transformation towards a circular economy [
5]. Many of the identified barriers could be addressed with the help of computer vision, machine learning and robotics (based on optical recognition and intelligent evaluation algorithms). The arrival of artificial intelligence and robotic technology has the potential to revolutionize the design and operation of municipal waste sorting plants [
6]. This could lead to increased operational efficiency and thus to a more sustainable management of municipal waste.
Nevertheless, an initial review of the existing literature has shown a clear lack of empirical data on how exactly artificial intelligence improves waste sorting. Most of the available literature either stays on a purely conceptional level, and simply describes how or which specific activities could be used, or it doesn’t provide actual data that would allow assessing the strengths and weaknesses of specific robot installations [
7,
8,
9,
10,
11]. Leif (2018) for example describes five potential key advantages of robotic sorting, e.g., an improved alignment with recycling markets, but also emphasizes the need for pilot studies and economic validation [
10]. This paper aims to address this specific gap by providing data based on a transparent evaluation protocol with a variety of data points for different materials.
The guiding research question for this paper, and the underlying research, has been the empirical validation of the often-claimed contributions of artificial intelligence for the circular economy. By evaluating the initial training phase of such a robot under real-life conditions it aims to provide new insights into how exactly robots could be used as enablers of closing material loops.
2. Opportunities of Digitalization in Waste Sorting
Waste sorting plants, together with the disposal infrastructure, serve as filters in the value chain of waste management by removing more or less precisely sorted material fractions, which can be diverted directly into production or sold as raw materials on the local or global market, and reducing the amount of waste from final disposal. For this reason, the sorting of municipal waste has become a relevant research topic in recent decades. In general, there are two technical approaches to sorting waste into individual material streams: manual sorting and automated/mechanical sorting. In most cases, sorting plants use a combination of manual and automated sorting techniques, as some steps in the sorting process are best handled manually. Other steps, on the other hand, benefit from more targeted, safer and cost-effective automation. There are various technologies that can be used to sort different waste streams. These depend on the type of waste stream, e.g., waste screening (trommel, disc or oscillating screen), air separation (zigzag, rotary and crossflow classifiers, or suction hood), ballistic separation, film grippers, magnetic sorting, eddy current separation, sensor technology and manual sorting. Most of the time, these technologies are used in combination [
11].
Robotic technology promises a significant increase in the sorting performance of some waste streams and could be particularly valuable in waste streams containing hazardous substances, as it could allow fine sorting without human intervention. Typically, a conveyor belt passes the waste past a bundle of sensors, for example, cameras with visible spectral range, spectroscopic near-infrared cameras, 3D laser scanners, and metal sensors, while robot arms work above the conveyor belt and remove materials as the waste passes underneath. One of the main advantages of robotics is that it does not have to focus on a single type of waste but can collect different types at the same time and store them in separate containers. Sorting techniques that do not rely on the physical properties of a material for separation require material identification. As the accuracy and sensitivity of these technologies continue to improve, new technologies are being developed to identify different materials in waste streams. For example, the use of RFID tags in packaging has been considered to enable the identification and classification of individually packaging items. The concept envisages embedding RFID tags in individual packaging items, which can then be read either at pick up or in the sorting system to enable the precise sorting of different types of plastic [
12].
Gundupalli et al. (2017) carried out a comprehensive market analysis that identifies different commercial solutions available to fully automate the mechanical waste treatment process [
13]. Among the options analyzed is the ZRR2 system: a recycling robot that is considered to be the world’s first robot-driven waste sorting device with artificial intelligence (AI). These robots, equipped with computer vision and deep learning algorithms, separate precisely selected waste fractions from solid construction and demolition (C&D) waste. A single ZRR robot arm is capable of handling up to four different fractions with a purity of up to 98%. However, the ZRR robot has so far only been used for construction and demolition waste, and has been specially developed to increase its efficiency and reduce the cost of waste separation for typical construction materials. As part of this research project, the ZRR robot was used for the first time to sort municipal household waste streams. This is a very demanding scenario due to the different sorting conditions, waste compositions and morphology, which requires an extension of the scope of the technology. In particular, the ZRR robot must be able to identify and sort the following materials: Metals (ferrous and non-ferrous), wood, hard plastics (mixed plastics and hoses and pipes), hard materials (mixed materials, concrete, bricks, limestone, asphalt, etc.), cardboard, and plastic bags by color. In addition, the technology must also adapt the gripping system to the new waste conditions. To work with a municipal waste stream the robot must be trained in this project to recognize and sort new materials: textile, cardboard (OCC), high-density polyethylene (HDPE), low-density polyethylene (LDPE), polypropylene (PP), Tetra Pak, and printing and green waste. In its application with municipal waste, the robot also works under more demanding conditions that could interfere with detection: higher conveying speeds, multilayer distribution of the waste over the conveyor belt, the presence of dust, alkalis and organic waste.
3. Materials and Methods
As outlined above, this paper aims to provide systematically recorded empirical data on the strengths and weaknesses of such robot systems. In order to develop an empirical basis for the assessment of artificial intelligence as an enabler of improved sorting of municipal solid waste, an industrial-scale pilot plant has been set up. The system was installed at the Ecorparc4 municipal waste sorting plant in Barcelona that receives an average of 300,000 tons of municipal waste per year.
The following describes the installation of the system and its key characteristics, as well as the methodological approach for a systematic evaluation of sorting accuracy and efficiency. This required the development of a standardized data recording protocol.
3.1. Installation of the Test System
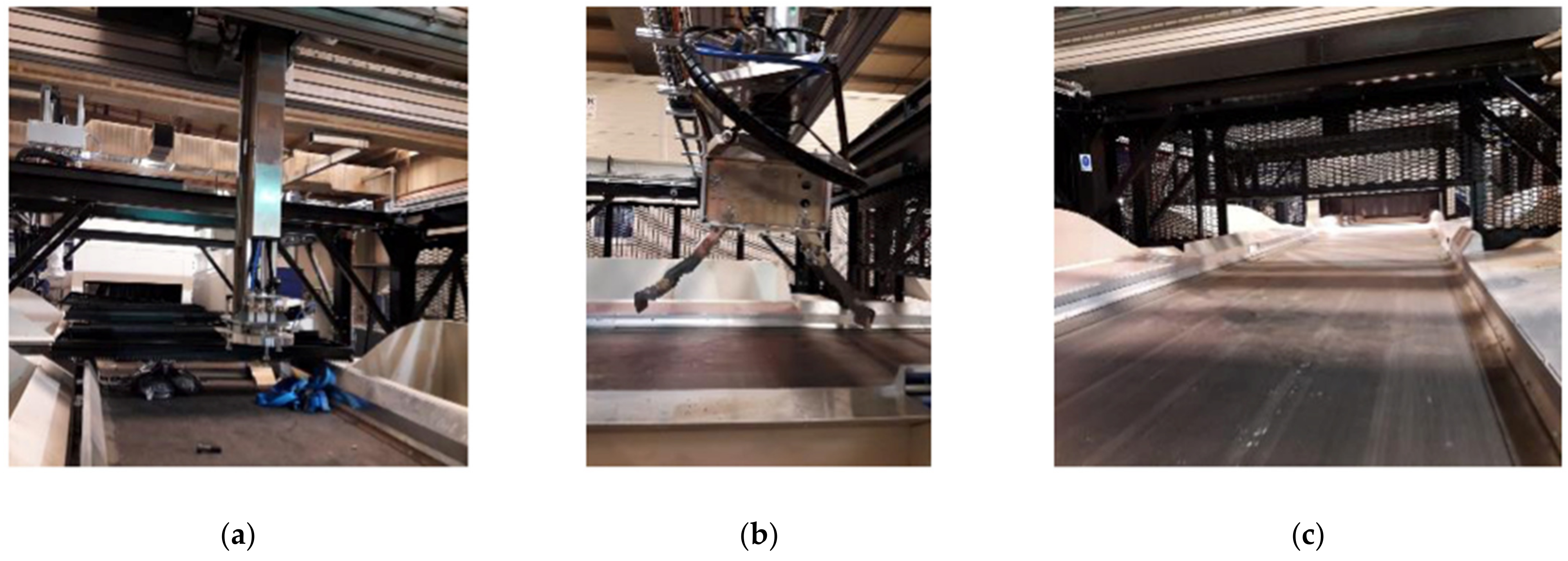
The empirical tests within the project were carried out with a ZRR2 robot system from ZenRobotics from Finland. The robot consisted of two robot arms equipped with several sensors (placed above a conveyor belt), including a truck, a metal detector, a high-resolution RGB camera, an NIR sensor (near-infrared spectrum), a VIS sensor (visual light spectrum) and a deep learning-based software. Within the plant, the robot was installed above the bulky waste conveyor belt (see
Figure 1), and a waste stream that had not yet been recycled in this plant. The entire system is located on a platform with over eight different hoppers (four hoppers per robot arm) and is integrated into the current plant sorting process in order to take into account aspects such as ensuring a monolayer flow to the robot inlet or the possibility of testing the technology with other waste streams.
At the beginning of the project, an evaluation methodology and concrete test protocols were developed on the basis of literature evaluations and expert interviews. This should enable an assessment of the sorting quality of the robot. In this context, key parameters for the input materials, the process and the starting materials were defined. The product groups were PET bottles, plastic films (LDPE), aluminum, ferrous metals, PE boxes, large PE bottles, paper/cardboard, PP, (untreated) wood, textiles, Tetra Pak and vegetable substances. Within the project, samples of 250kg each were used for training and evaluation. For the process parameters, the sorting belt speed (m/s), the configuration of the hopper position for the selected materials, the priority settings and the gripper system settings were recorded. The output parameters were divided into robot throughput (global for two arms) in kg/min (picks/min) and in percentage of effective picks on the one hand and sorting efficiency on the other hand. The selection efficiency of the pre-processing system was analyzed in terms of sorting quality/purity (impurities in the target materials as a percentage of weight, as well as the occurrence of target materials in the unsorted residual waste), the color and size of incorrectly sorted products and the recovery rate (kg of recovery per kg of fraction in the input stream as a percentage). The tests with the ZRR2 started with training the robot, then the sorting was tested under optimal feeding conditions (i.e., optimal speed and amount of waste stream). The last test consisted of a continuous test in which the flow of the waste streams was continuously increased up to the amount required in practice
3.2. Training of the Robot
In a first training phase, the robot was trained to recognize and sort the desired waste products. Once the correct feeding conditions were reached, the artificial intelligence of the ZRR robot had to be trained to identify the 13 different materials or waste streams: Ferrous metals, non-ferrous metals, textiles, cardboard, HDPE, LDPE, PP, wood, PET, paper, other mixed plastics, Tetra Pak, printing and green waste. The robot was fed two hours a day with the selected material. The training procedure was divided into 10 steps:
Gather samples of the new fraction to avoid 1000 articles of different sizes, shapes and material types.
Name the new fraction in the Intelligence Unit.
Feed samples manually to the sorting belt.
ZRR sensor unit scans the new material.
ZRR brain analyses data.
ZRR smart gripper picks the objects.
Take any rejected objects.
Feed those objects again to the sorting belt.
ZRR sensor unit scans those objects again.
The ZRR learned a new fraction.
Depending on the complexity of the waste stream, the process described above was repeated several times until the desired results were obtained for this particular material stream.
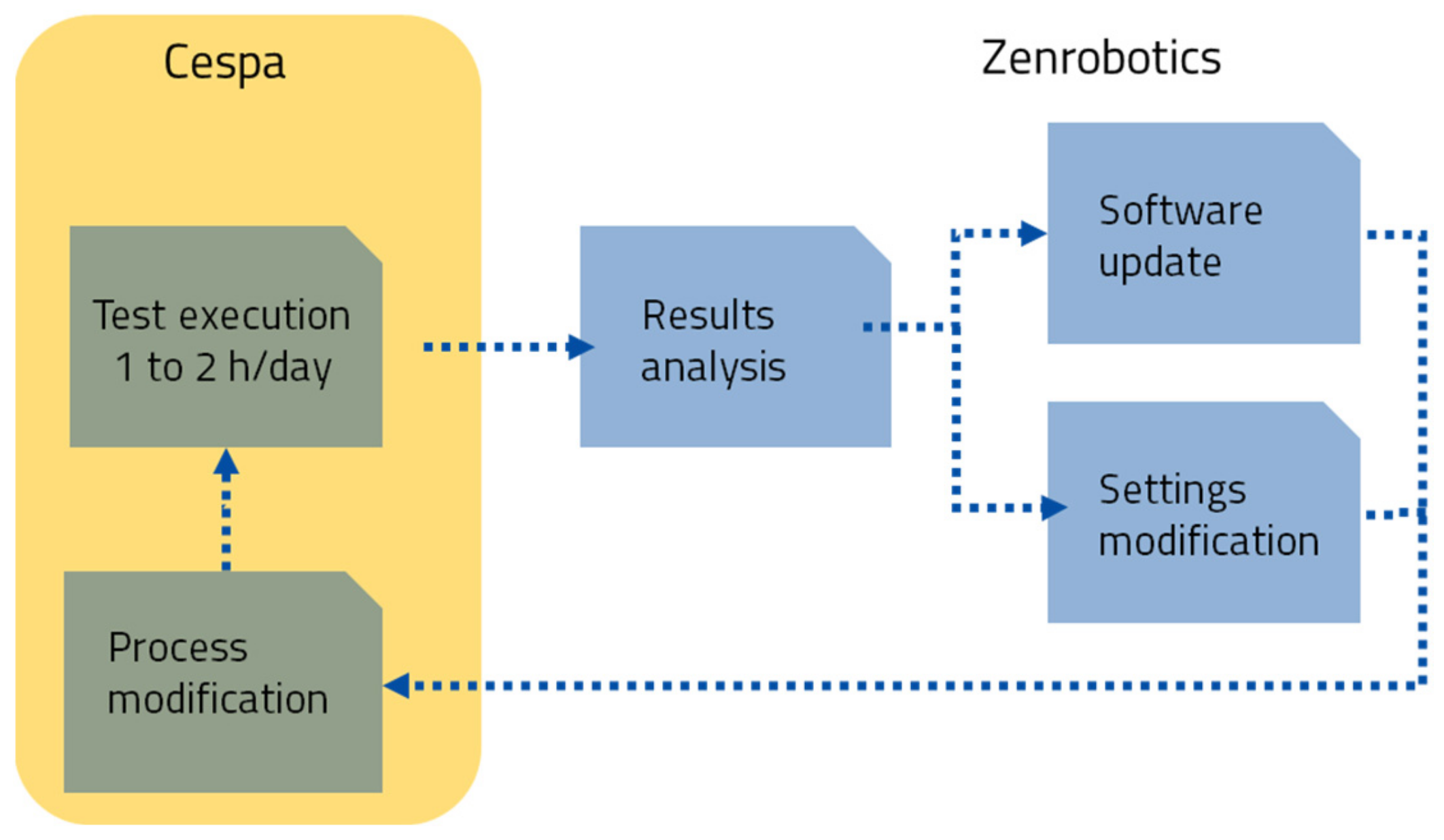
Figure 2 below illustrates the procedure of this robot training.
3.3. Test under Optimal Feeding Conditions
The subsequent tests under optimal feeding conditions consisted of providing the robot with a singularized monolayer in which all objects were arranged in a single layer and did not overlap, i.e., under ideal feeding conditions. Under such conditions, it was possible to find out to what extent the training of the recycler and the database setup was successful and how the reference purity and the degree of recovery of the sorted fractions could be estimated.
After the training, the performance of the robot was tested in five tests between November 2018 and March 2019 with regard to fraction purity and waste recovery. Two different types of test methods were used in these five tests. On the one hand, tests were carried out with a low feeding rate (about 1000 picks/h)—giving the robot more time to identify the materials—and on the other hand, with a low sorting rate (sorting of only 3 to 6 materials per test).
In this first phase, the robot was manually supplied with previously classified waste from the waste stream over a period of 15–30 min. At the end of the experiment, all the recovered fractions were weighed, as well as the waste separations, the performance was calculated and any necessary adjustments were made. In the operational tests, the robot was supplied or fed with the designed material flows over a longer period of time under real process conditions.
The designed tests evaluated the robot’s performance by measuring detection efficiency, picking efficiency, robot availability and fraction purity, as well as the influence of key operating variables on the robot’s performance. First, the robot test was performed by changing the process parameters. The results were then analyzed and ZenRobotics updated the robot software based on deep learning algorithms. The objectives of the tests were the following:
Train the ZRR to recognize fractions of interest.
Determine the purity and recovery rate in ideal conditions.
Determine the maximum feeding rate and associated purity.
Train the robot to ignore large piles.
Find out how to feed the robot to satisfy operational criteria.
4. Results
Using the process presented, 500 to 1000 pieces per fraction were collected for the 13 different materials for robot identification training and then manually fed to the sorting belt. Several iterations were required to achieve adequate performance.
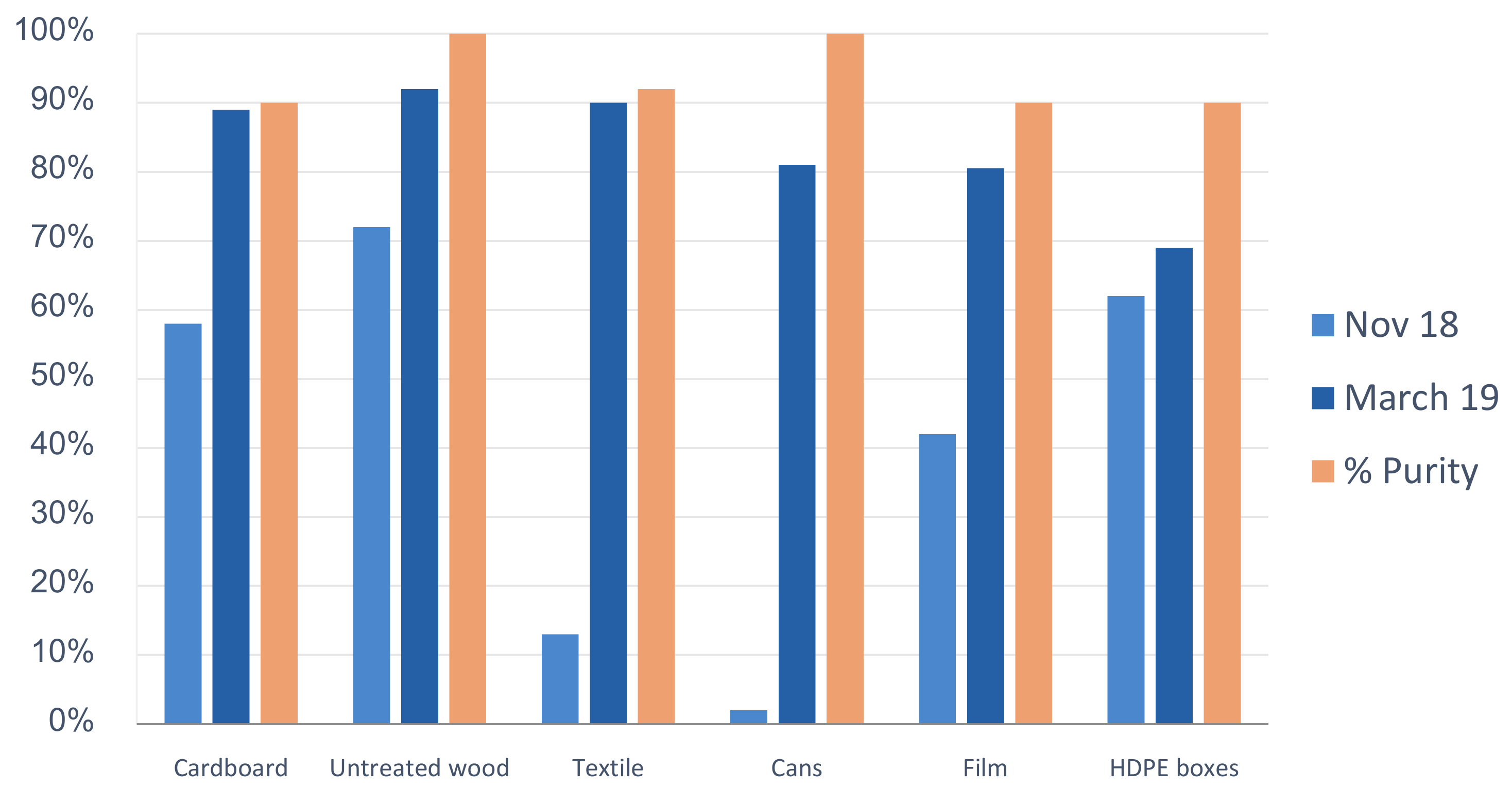
Figure 3 shows the results of the robot testing for the main material types, performed in single tests:
As a result of the systematic training and operation, the detection of the robot for all 13 materials could be increased, almost doubling the robot’s detection capability. It is then planned that the capacity of the system will be increased and that it will be able to identify new materials in the waste stream by implementing updatable, intelligent, self-learning software.
In the next phase, the throughput was gradually increased until the desired throughput for production was achieved. In some cases, a monolayer of the material could no longer be guaranteed, objects began to overlap, touch and cover each other. Under such conditions, the ZRR robot showed increasing difficulties in detecting and handling objects.
So far, an average purity of 90% has been achieved for the 13 materials in the tests carried out.
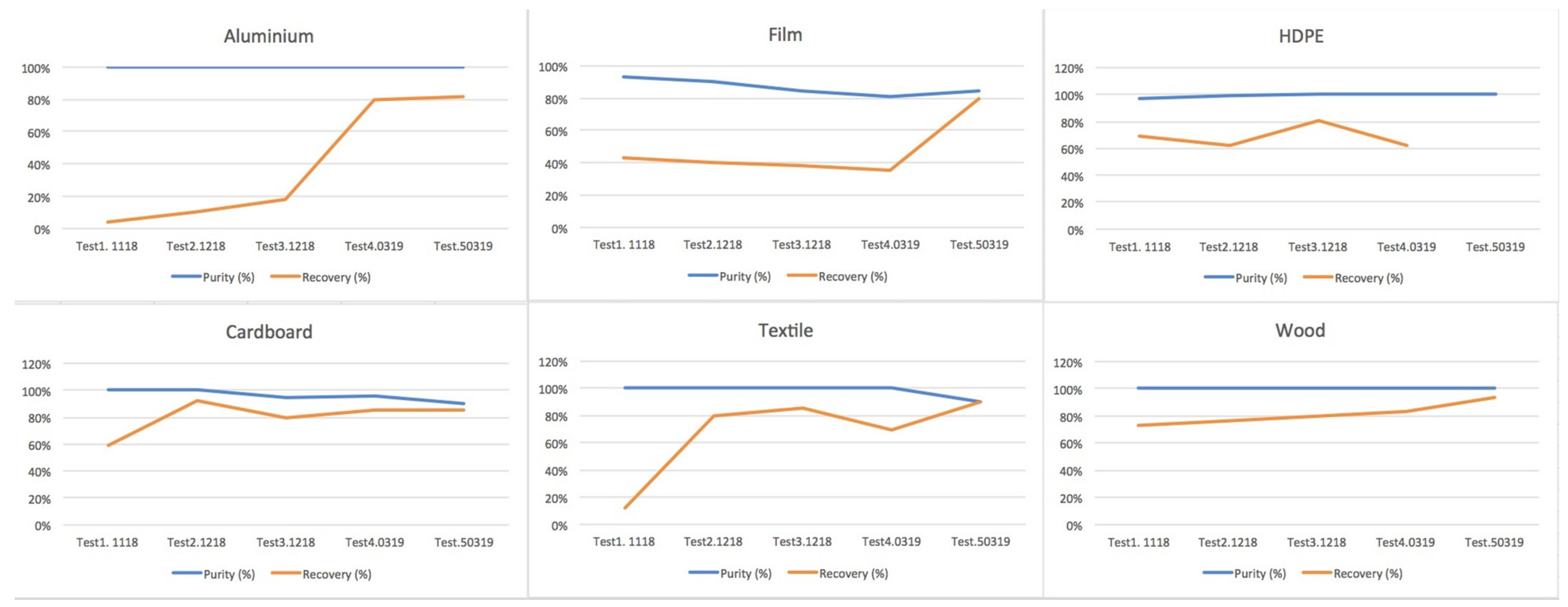
Figure 4 shows the overall results of the materials: aluminum, foil, high-density polyethylene (HDPE), cardboard, textiles and wood.
5. Discussion
The results obtained are promising with regard to the purity of the sorted waste fractions, as the purity in almost all separated materials clearly exceeded the original expectations with values up to 100%. However, the results for waste recovery were not so successful as there were certain proportions where only 13% of recovery (textiles) (or even less for aluminum) was achieved. The difficulties identified leading to these results are related to the different composition and morphology of municipal waste compared to construction and demolition waste, resulting in lower detection and therefore lower sorting performance.
In addition, some challenges for the use of robots could be identified. A high-performance communication data network is required that can be optimized by a 20 Mb/20 Mb data network. For long waste pieces (e.g., textiles, foils, paper and cardboard) there are also difficulties in the gripping process. The unstable inflow of waste is also a challenge that can be solved with a measuring sensor. Finally, there is the problem of multi-layer and non-uniform distribution of waste over the conveyor belt, which must be eliminated by adjusting the speed conveyor and redesigning the robotic waste feeding system [
4].
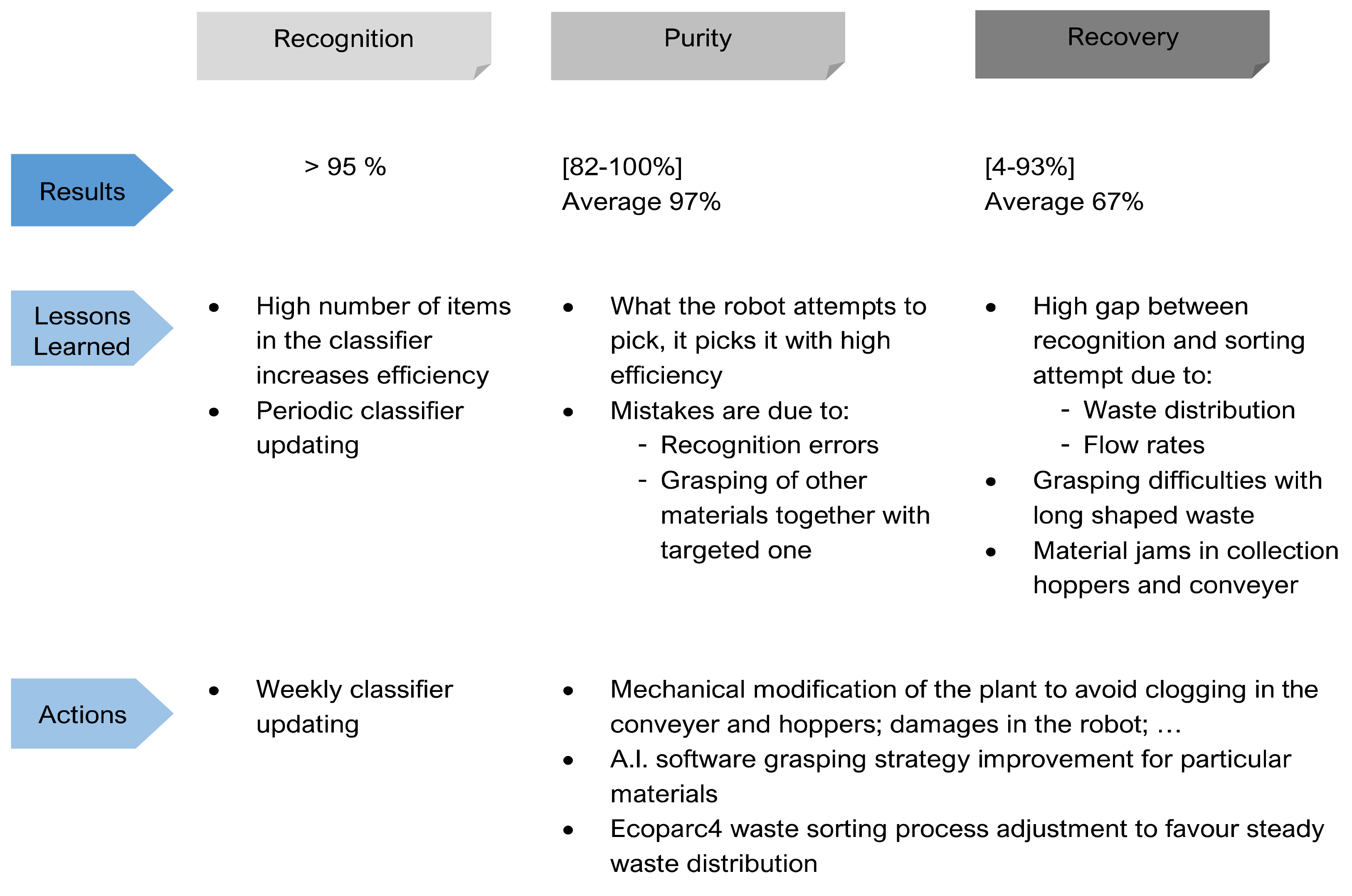
To date, the ZRR2 has achieved an average purity of 97% for all 13 waste streams tested.
Figure 5 shows the general results and the findings from the robot tests. In addition, some measures have been identified that could improve the results of the robot sorting, e.g., weekly updating of the sorter, mechanical modification of the plant, improvement of the software gripping strategy and adaptation of the waste sorting process, such as the installation of a roller chute to support waste during the disintegration process, or the redirection of part of the bulky waste stream (mainly closed bags) into the plant inlet, which also reduces the amount of waste the robot has to process.
To our knowledge, this is the first scientific publication that presents empirical data on the use of an AI-based robotic sorting system for mixed municipal waste, a comparison with other robot systems should be the next step to validate these results. Further tests should also investigate how the efficiency of recovery can be increased, by optimizing the process parameters of the waste disposal plant, e.g., adjustment of the speed belt, distributor belt and hopper arrangement. The main difficulties observed during the operation of the robot were associated with the different composition and morphology of municipal waste compared to construction and demolition waste, resulting in lower detection and sorting efficiency.
6. Conclusions
Based on the analysis of the empirical results presented in this paper, first conclusions can be drawn on the overall environmental impacts of artificial intelligence on waste sorting and recovery of raw materials from municipal solid waste. There seems to be significant evidence that if a further adaptation and optimization to the operating conditions of a real waste treatment plant will be successful, significant benefits could be realized: from an ecological point of view, it reduces the amount of waste deposited in landfills and increases the recovery of recyclable waste as highlighted in the specific test application in Barcelona.
Overall, there is still a need to integrate the increasing digitalization of waste management in its various forms and to not consider it solely from the perspective of material recovery quotas. The increasing use of robots, for example, is likely to lead to the loss of jobs with low qualification requirements, which will clearly lead to uncertainty among employees; who, at the same time, emphasize the opportunities for reduced accident risks.
However, the commercial use of data on the composition of household waste leads to conceivable conflicts with data protection. Further research on systemic effects of increased digitalization will be necessary as part of a future sustainability agenda for digitization; here, the topic of recycling could be used as an example to discuss which framework conditions, specifications and incentives will be needed in order to use digitization as an instrument both for future competitiveness and for achieving the set sustainability goals [
16].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




