
Multi-Hop-Enabled Energy-Efficient MAC Protocol for Underwater Acoustic Sensor Networks



Abstract
:1. Introduction
2. Related Works
3. Proposed MAC Protocol Design

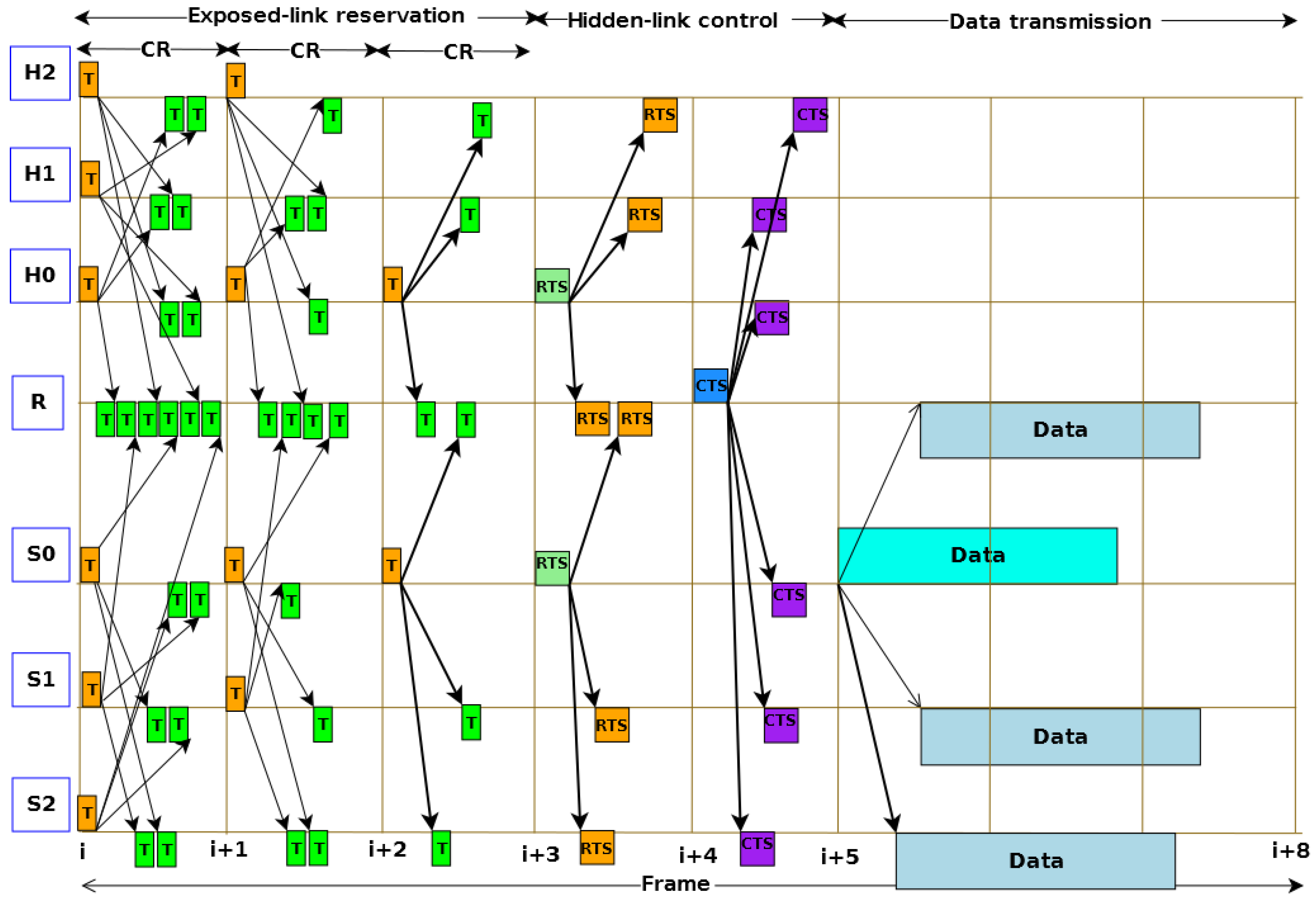
3.1. Protocol Description
- Local link reservation;
- Hidden link control;
- Data transmission.


4. Quantitative Analysis
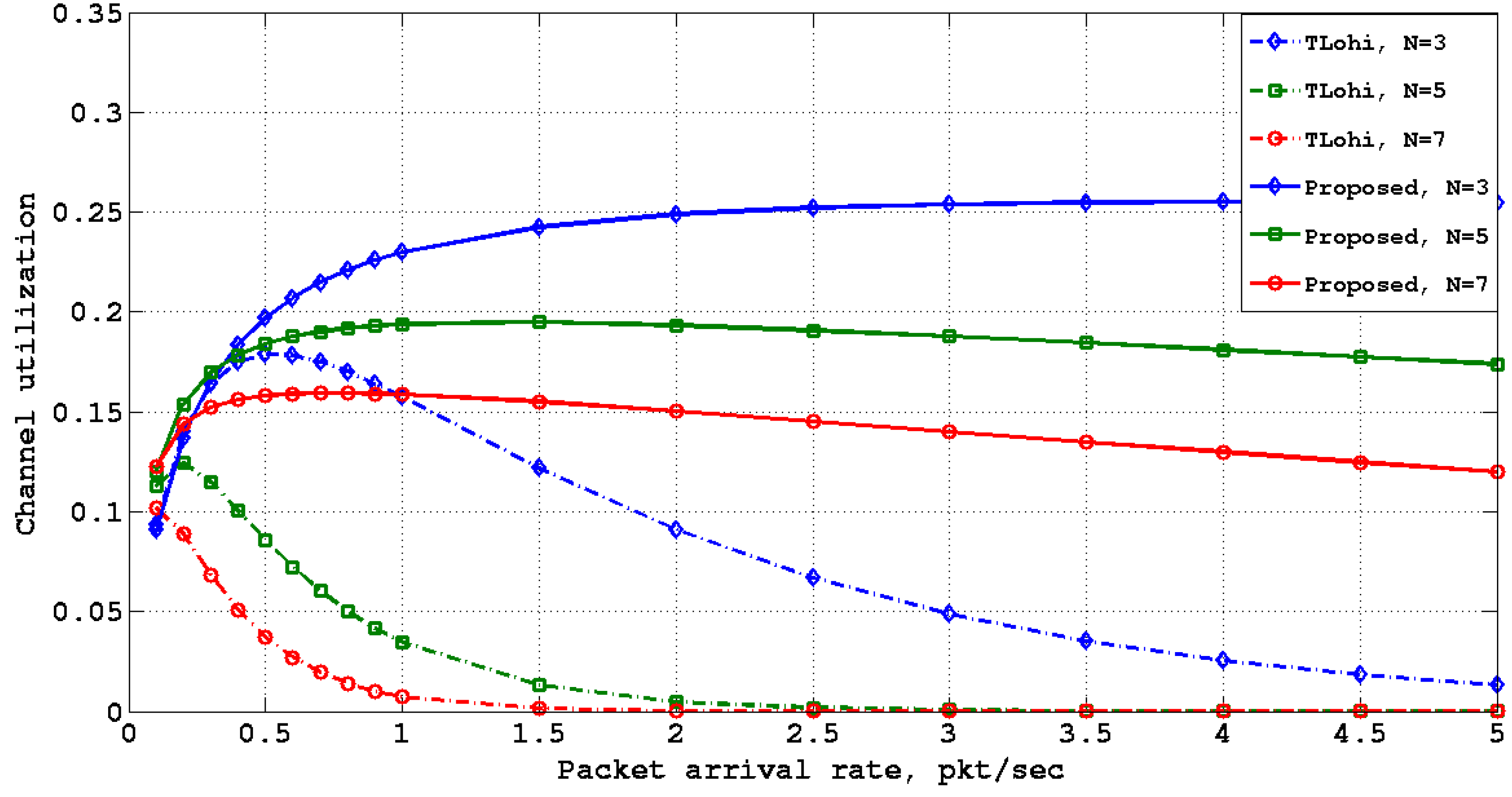
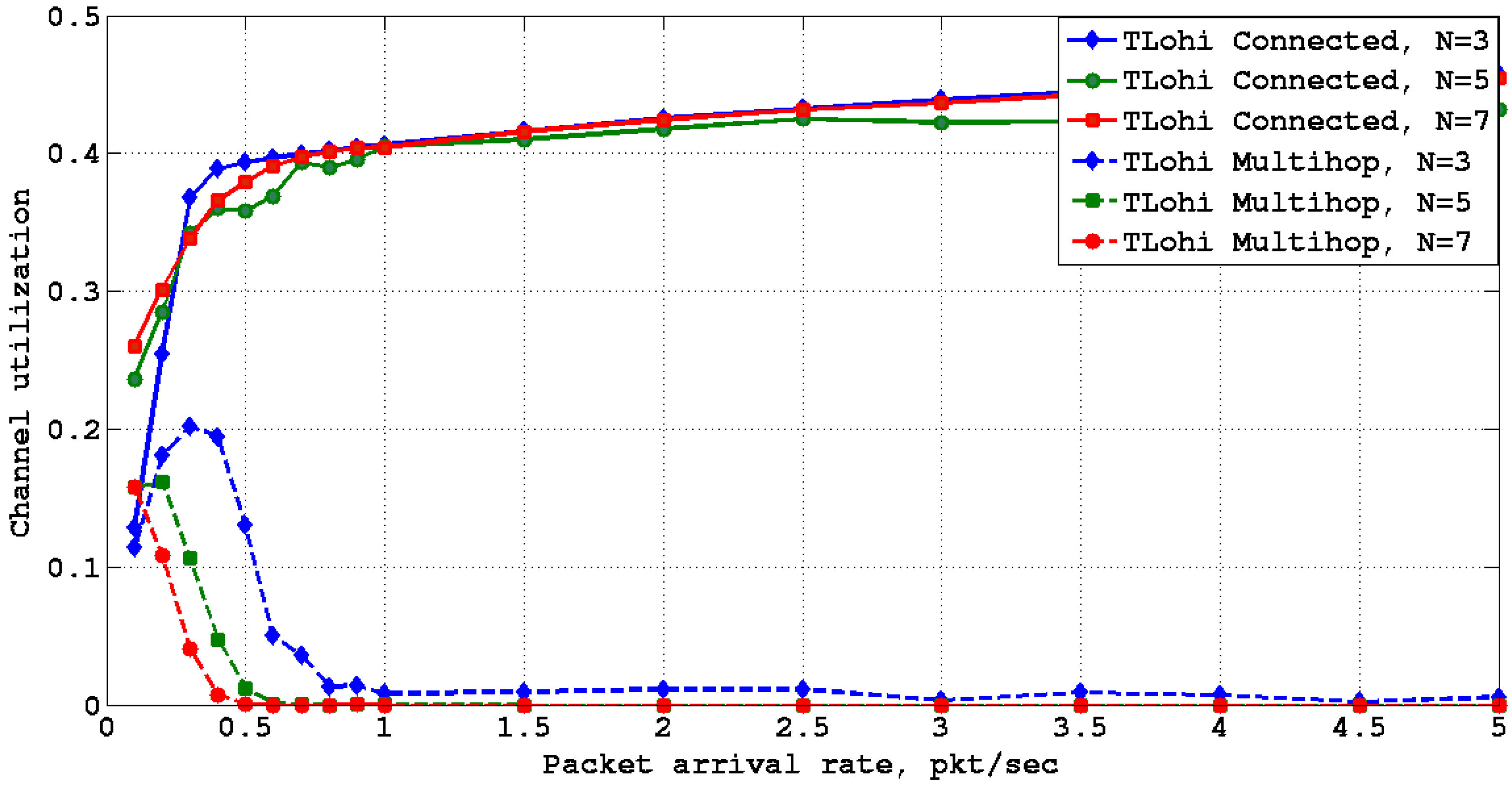
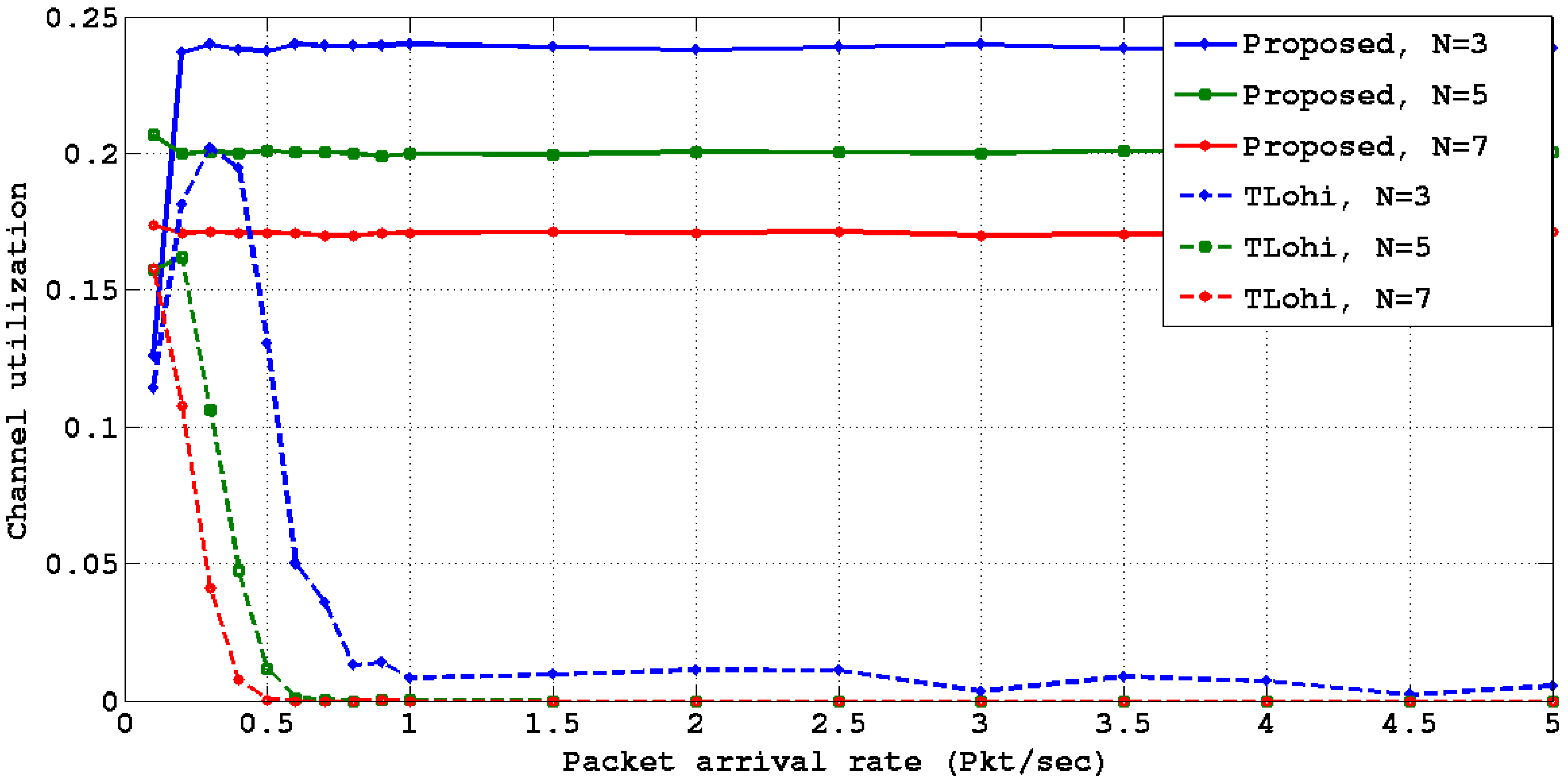
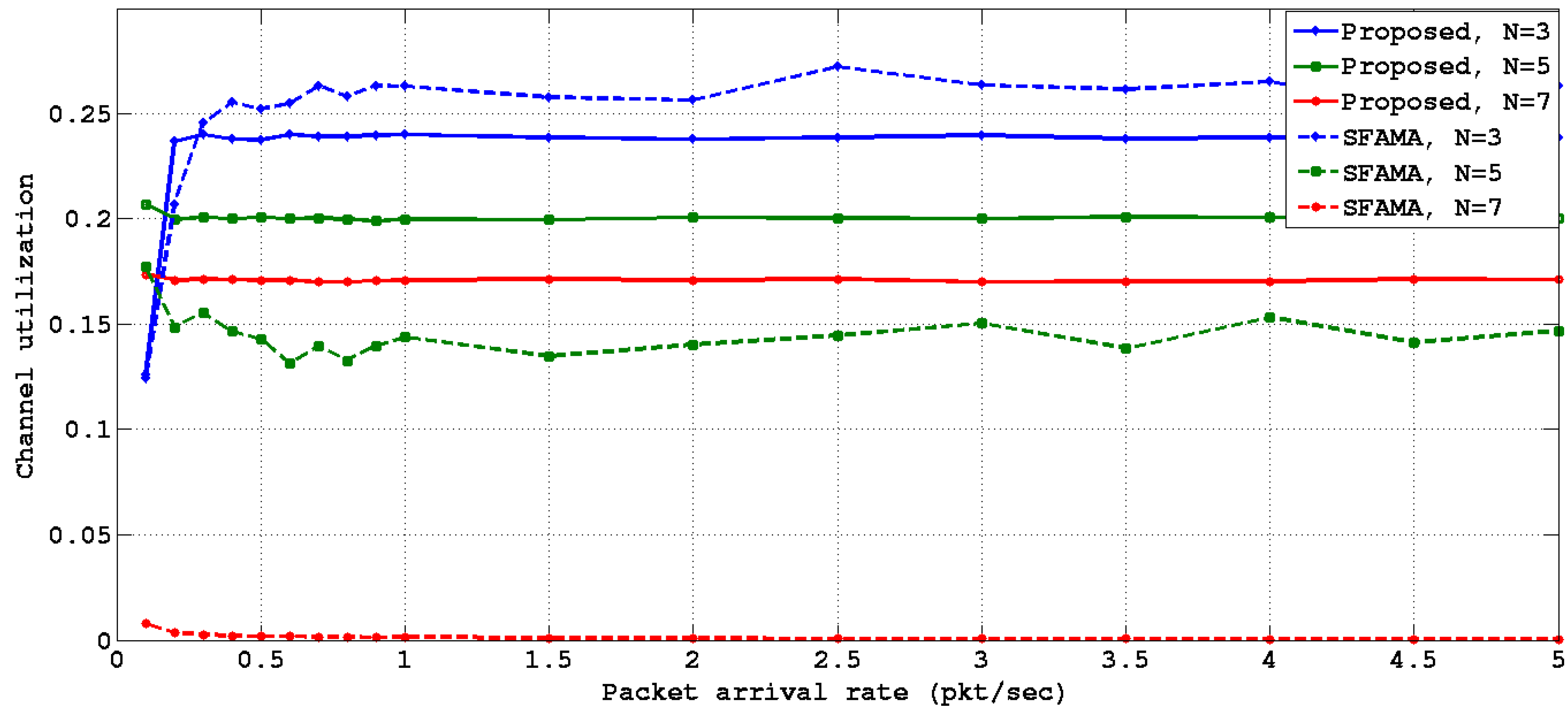
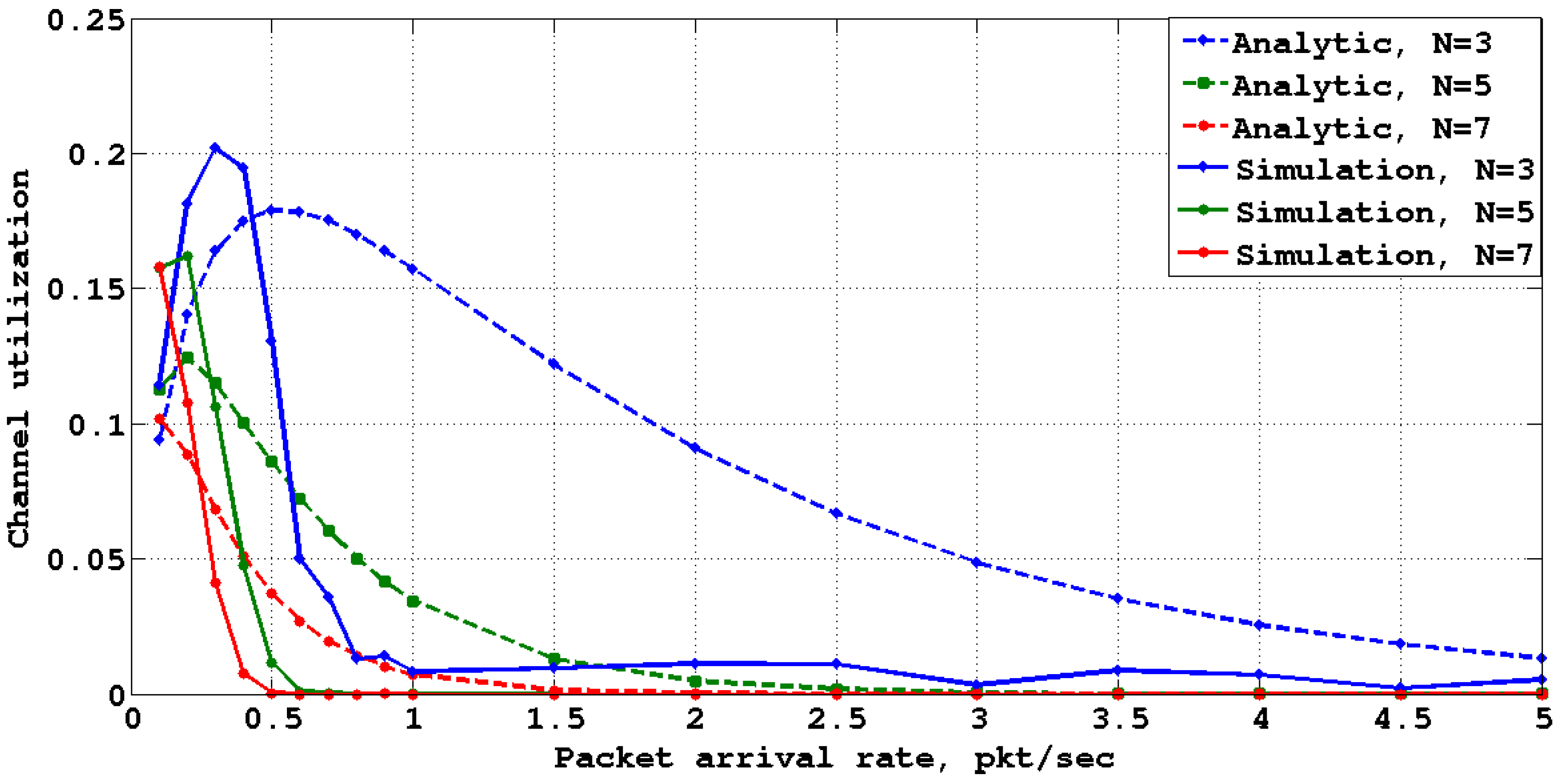
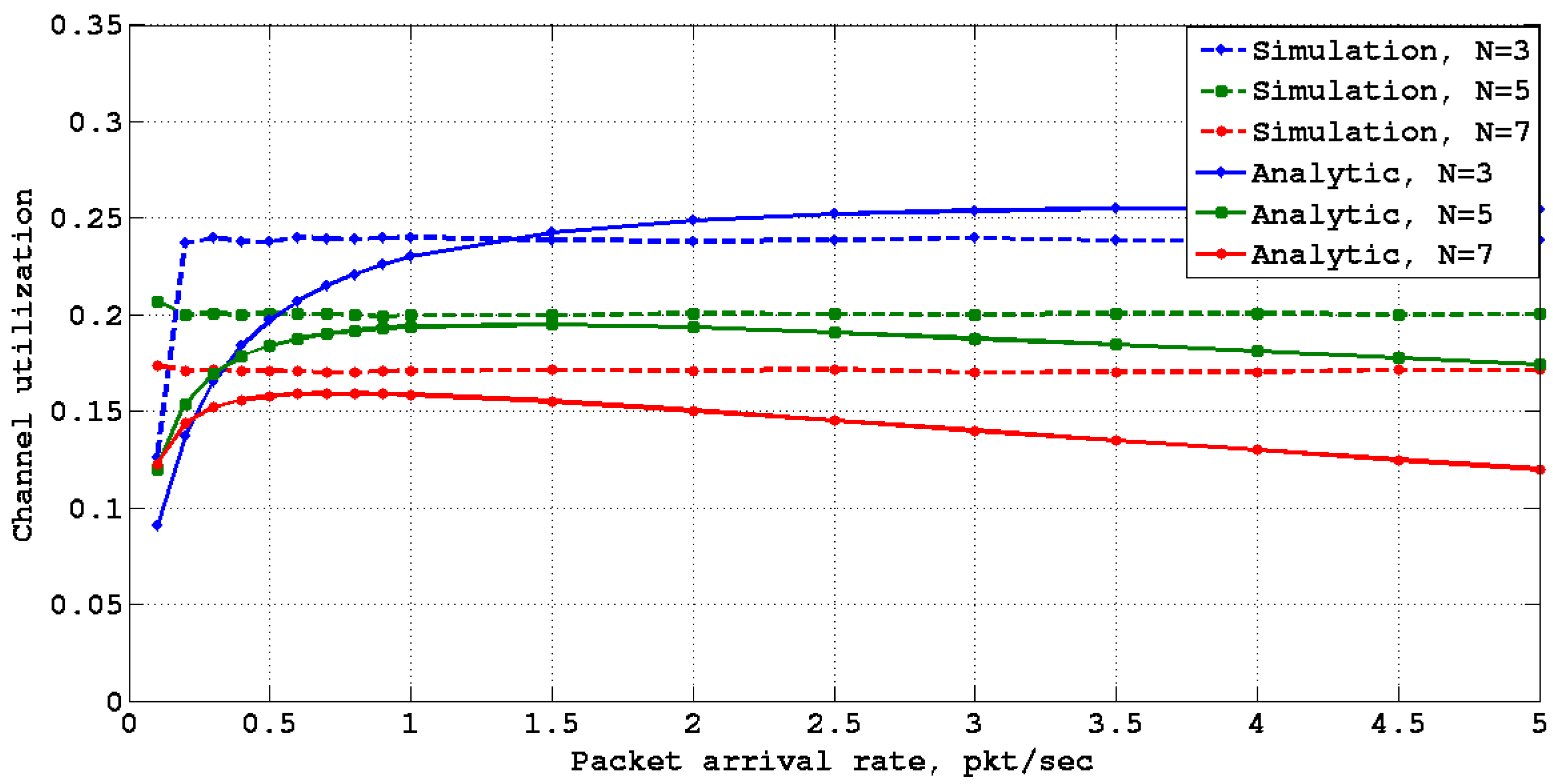
4.1. Channel Utilization
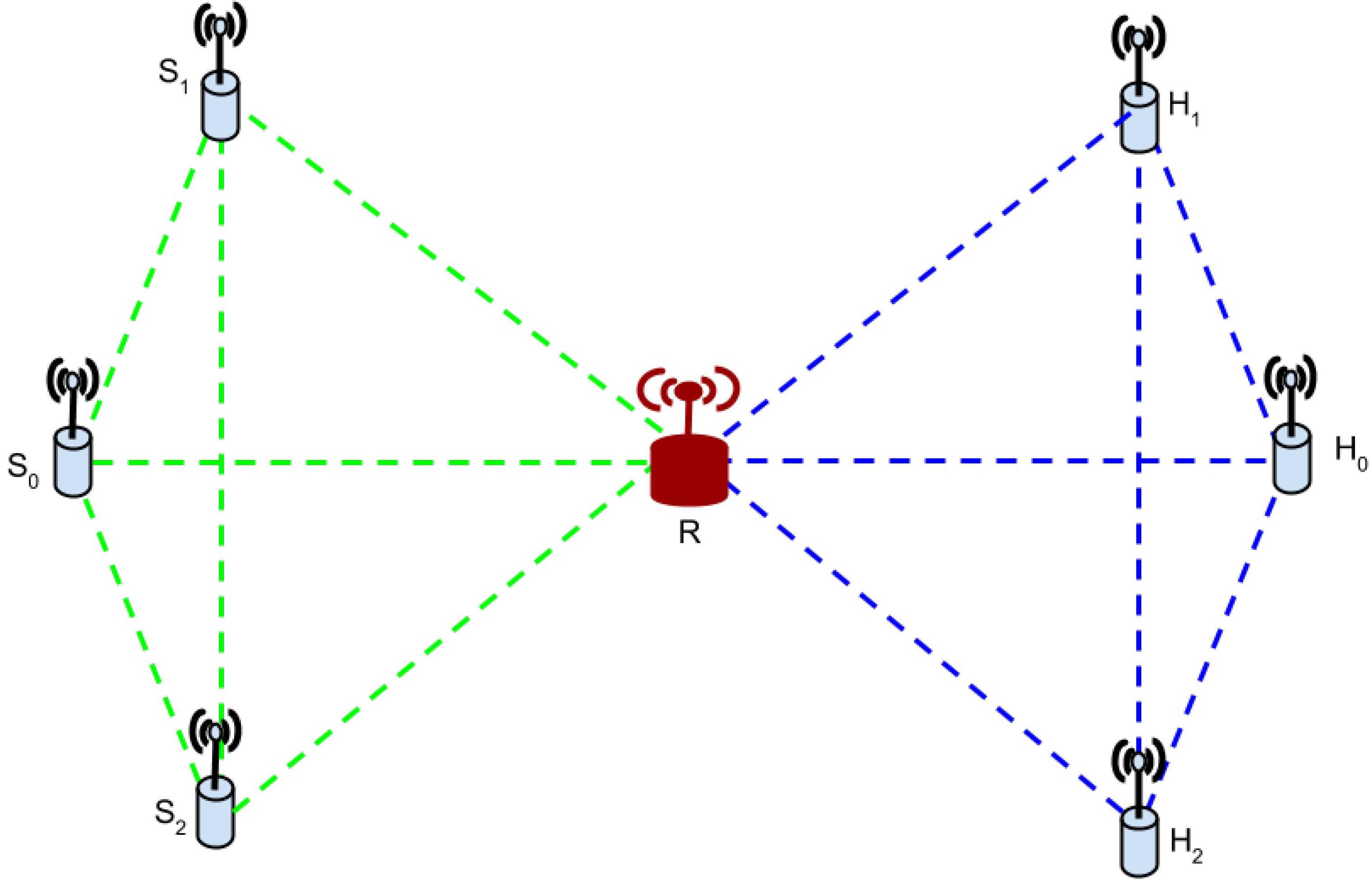
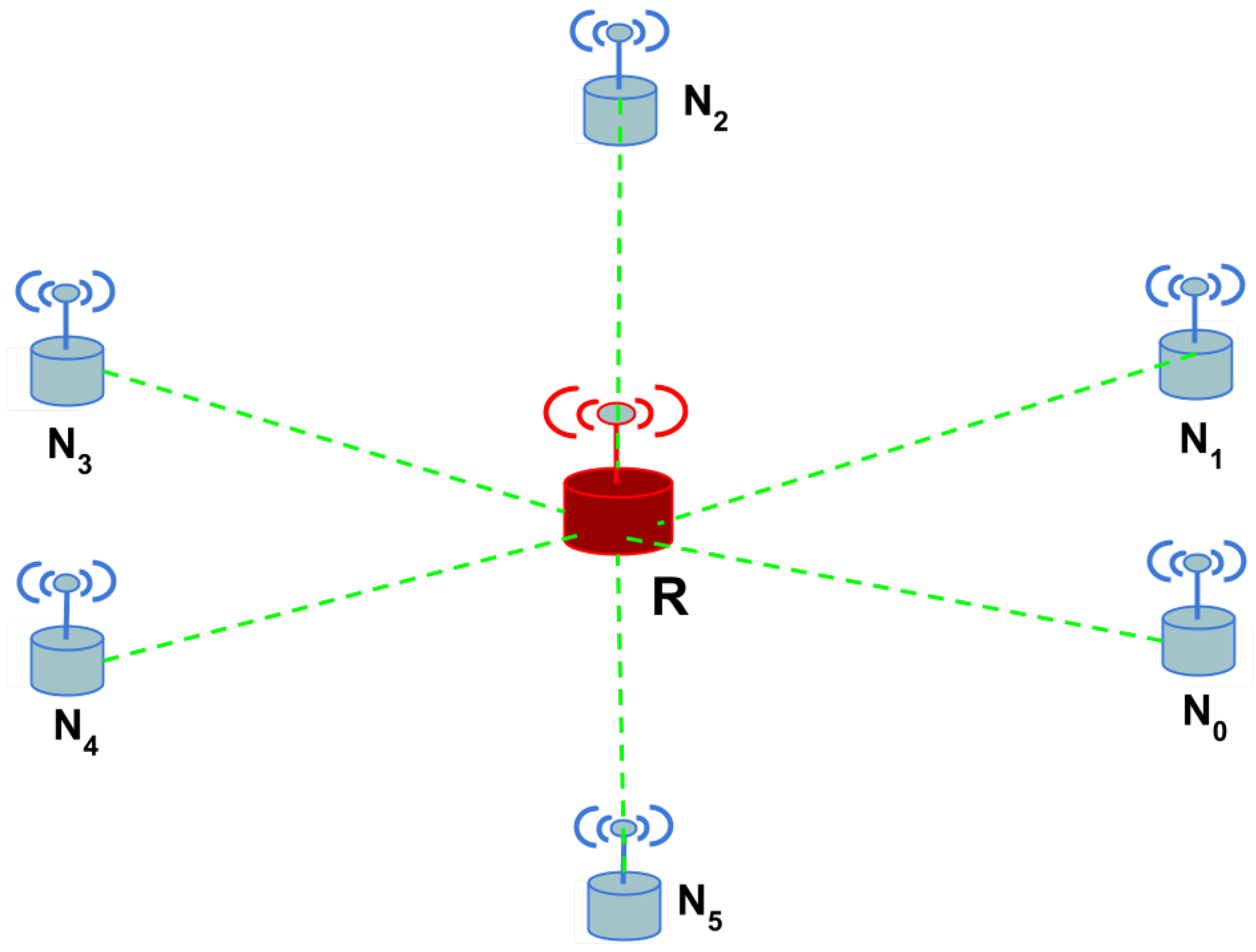
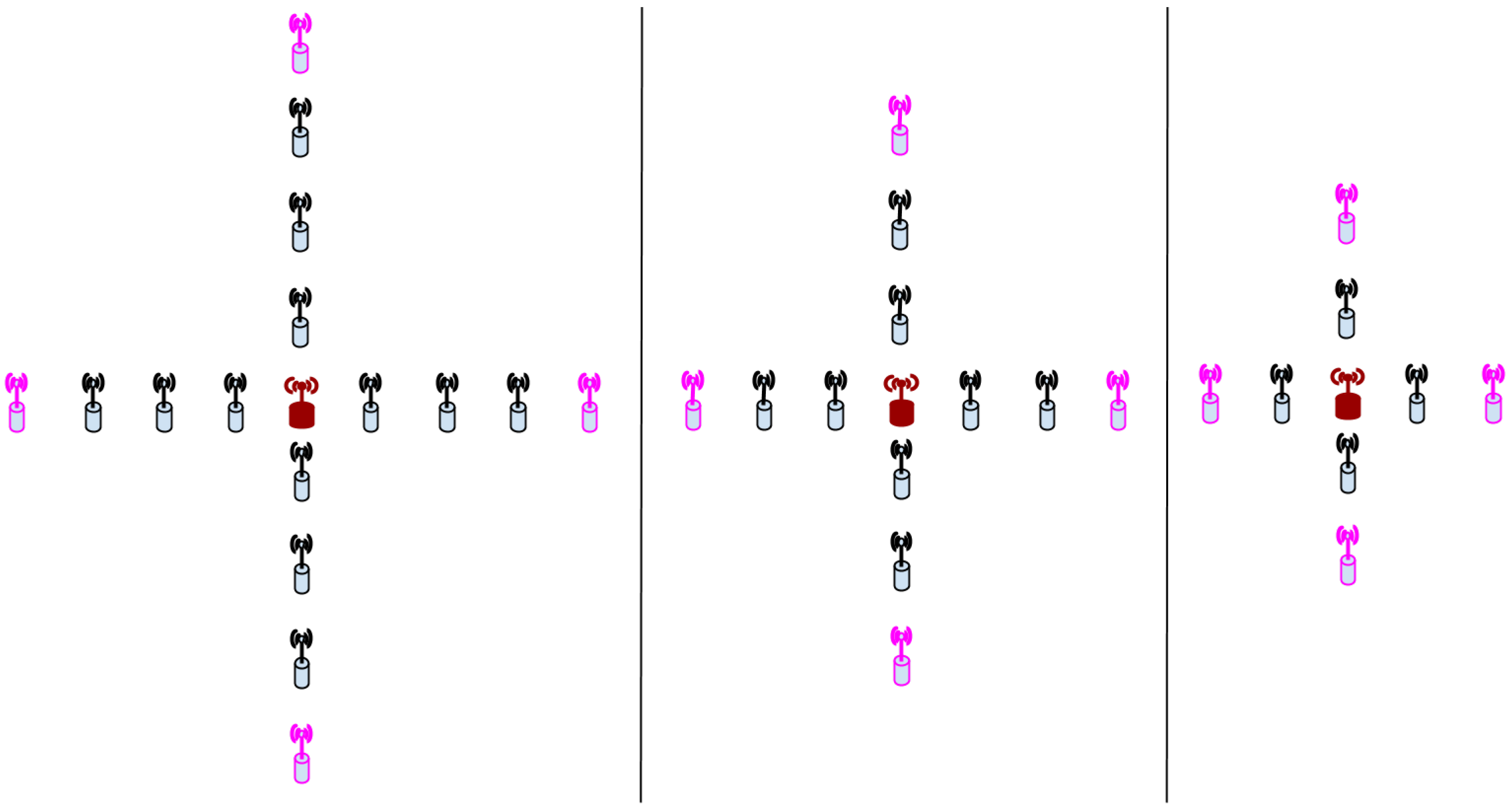
- The network consists of a set of source nodes and a single receiving node. Each node is hidden from the rest of the nodes, but connected to the receiving node. We assume that there are nodes, including the receiving node. In this setup, each source node experiences hidden nodes. Each source node with a receiving node forms a collision domain.
- The packet arrival rate to the MAC layer is assumed to have a Poisson distribution with a mean arrival rate of λ packets/seconds.
- Each data packet has a constant transmission duration of seconds.
- The inter-arrival time between two consecutive data packets is exponentially distributed with a mean of seconds.
- Each sending node acts as a source, and the receiving node acts as a sink.

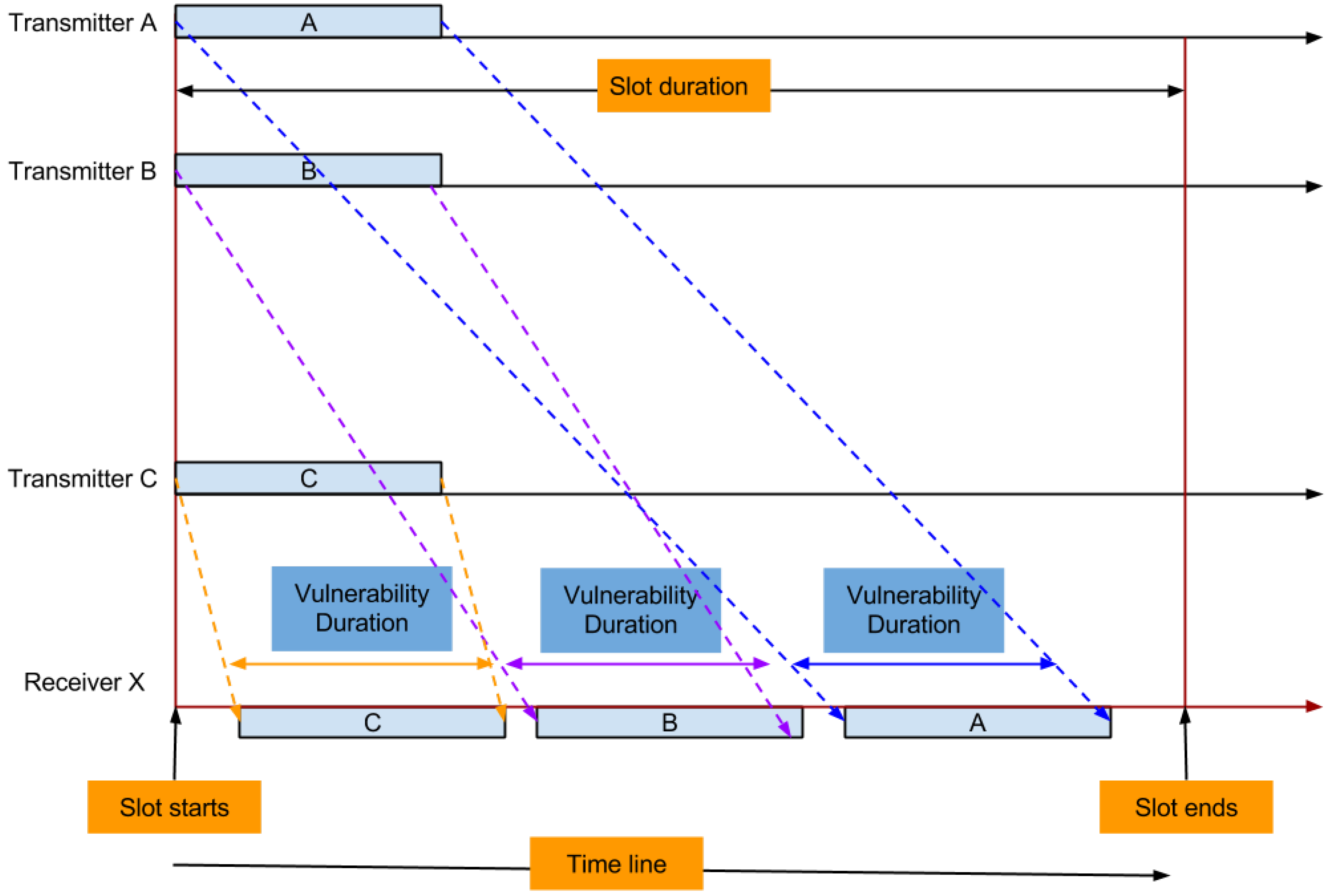
- Busy due to successful data transmission, ;
- Busy due to collisions of data packets at the receiver, ;
- Time spent in local link reservation, .
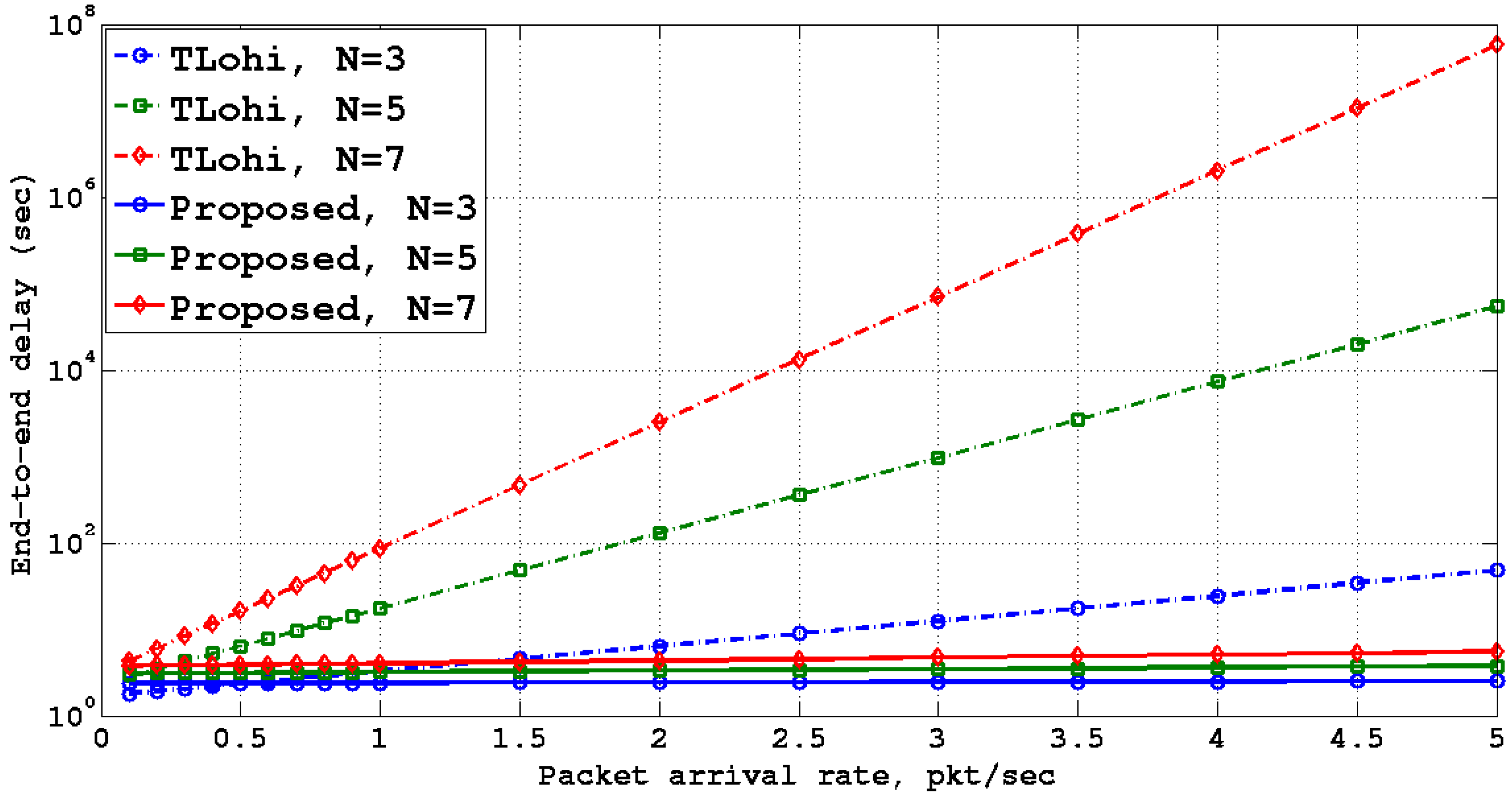
4.2. End-to-End Delay
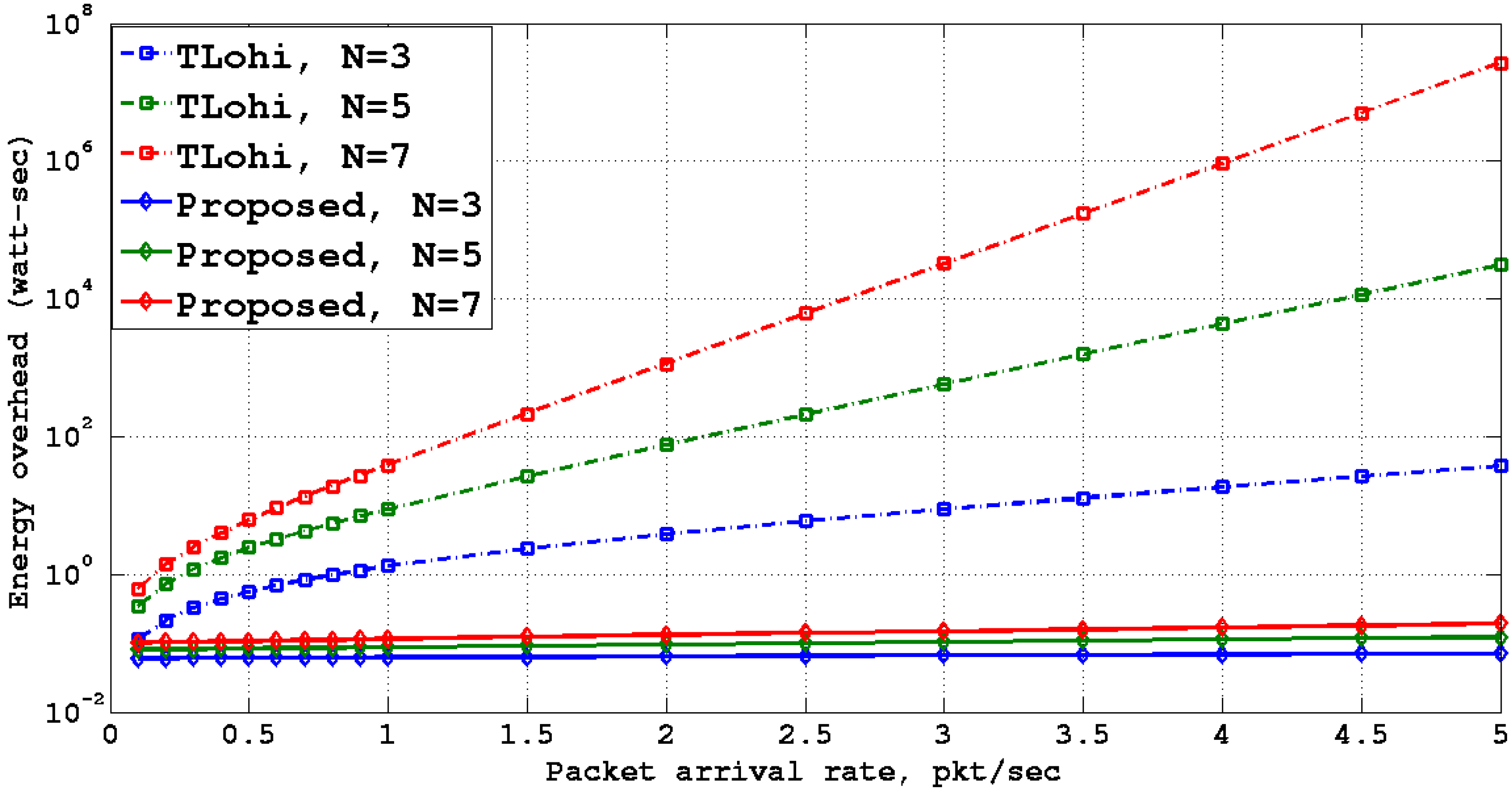
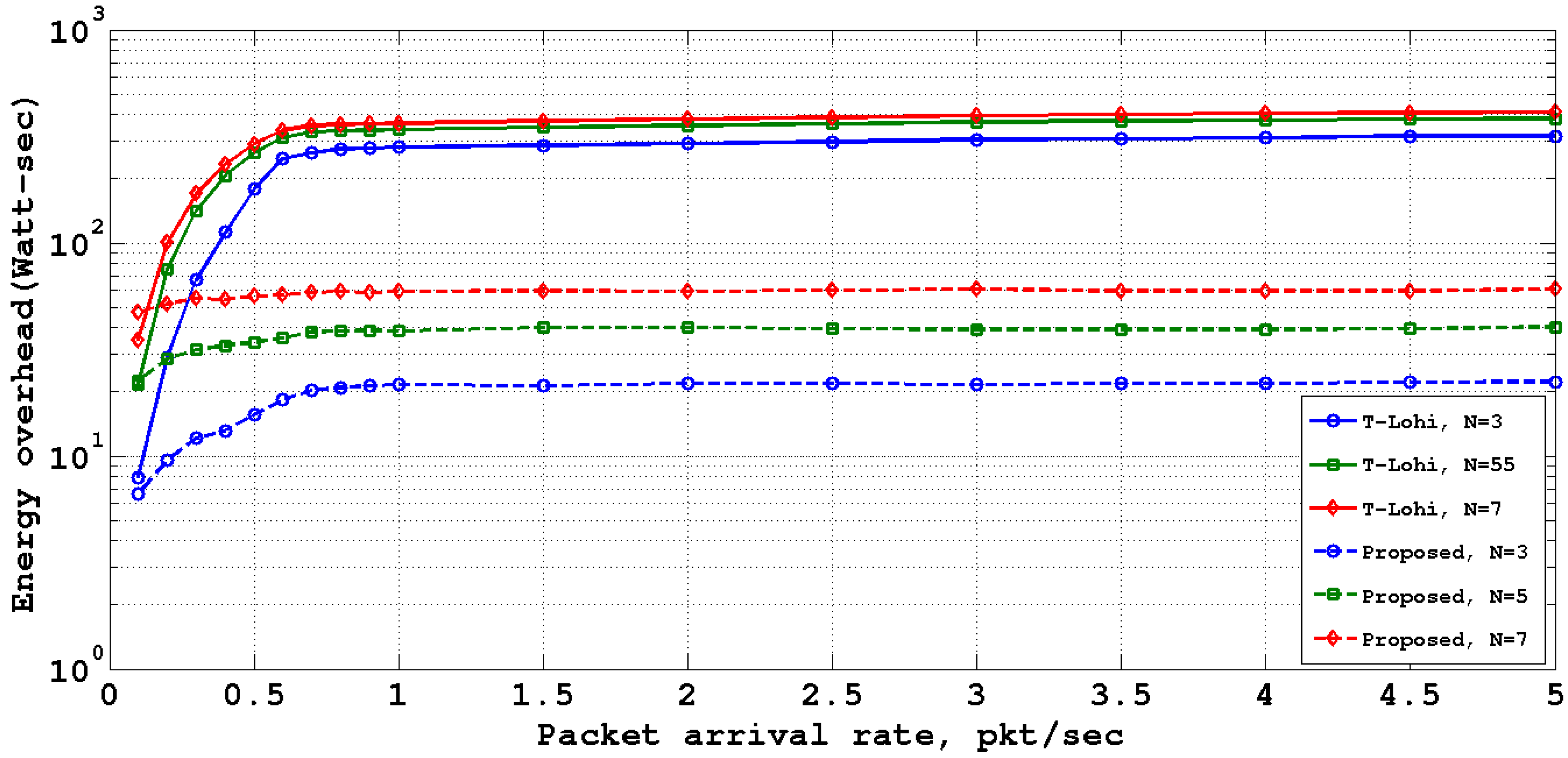
4.3. Energy Consumption
4.4. Quantitative Evaluation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Length (in Bytes) |
|---|---|
| Payload | 625 |
| AppHeader | 5 |
| NetwHeader | 5 |
| MAC Header | 5 |
| PhyHeader | 5 |
| Tone | 5 |
| CTS | 10 |
| RTS | 10 |
| Bit-Rate: 8000 bps | ||
|---|---|---|
| Mode | Data | Wake-Up Tone |
| Transmit (max) | 2 W | 2 W |
| Receive | 20 mW | 0.5 mW |
| Idle/Listen | 20 mW | 0.5 mW |



5. Simulation Results
5.1. Experimental Setup

5.2. Protocol Parameters
5.3. Results for the Single-Hop Star Topology






5.4. Results for the Multi-hop Star Topology



5.5. Results for the Multi-Hop Topology with Multiple Sinks and Relays


6. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Rossing, T.D. Springer Handbook of Acoustics; Springer-Verlag: Berlin, Germany, 2007. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. State of the art in protocol research for underwater acoustic sensor networks. SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 11–22. [Google Scholar] [CrossRef]
- Partan, J.; Levine, J.K.B.N. A Survey of Practical Issues in Underwater Networks. In Proceedings of the ACM WUWNet, Los Angeles, CA, USA, 29 September 2006; pp. 17–24.
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.A.; Li, Y. Research Challenges and Applications for Underwater Sensor Networking. In Proceedings of the IEEE Wireless Communications and Networking Conference, Las Vegas, NV, USA, 3–6 April 2006; pp. 228–235.
- Stojanovic, M. Acoustic (Underwater) Communications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar]
- Sozer, E.M.; Stojanovic, M.; Proakis, J.G. Underwater acoustic networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- IEEE Standard for Information Technology–Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks–Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. IEEE Std 802.11-2012 (Revision of IEEE Std 802.11-2007); The IEEE Standards Association: Piscataway, NJ, USA; pp. 1–2793.
- Syed, A.A.; Ye, W.; Heidemann, J.; Krishnamachari, B. Understanding spatio-temporal uncertainty in medium access with ALOHA protocols. In Proceedings of the Second Workshop on Underwater Networks (WuWNet ’07), Montreal, QC, Canada, 9–14 September 2007; pp. 41–48.
- Syed, A.; Ye, W.; Heidemann, J. T-Lohi: A New Class of MAC Protocols for Underwater Acoustic Sensor Networks. In Proceedings of the 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 231–235.
- Proakis, J.; Sozer, E.; Rice, J.; Stojanovic, M. Shallow water acoustic networks. IEEE Commun. Mag. 2001, 39, 114–119. [Google Scholar] [CrossRef]
- Rodoplu, V.; Park, M.K. An Energy-Efficient MAC Protocol for Underwater Wireless Acoustic Networks. In Proceedings of the MTS/IEEE OCEANS 2005, Washington, DC, USA, 17–23 September 2005.
- Ye, W.; Heidemann, J.; Estrin, D. An energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2002), New York, NY, USA, 23–27 June 2002; Volume 3, pp. 1567–1576.
- Gibson, J.; Xie, G.; Xiao, Y.; Chen, H. Analyzing the Performance of Multi-Hop Underwater Acoustic Sensor Networks. In Proceedings of the OCEANS 2007–Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6.
- Molins, M.; Stojanovic, M. Slotted FAMA: A MAC protocol for underwater acoustic networks. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, 16–19 May 2006; pp. 1–7.
- Garcia-Luna-Aceves, J.J.; Fullmer, C.L. Floor acquisition multiple access (FAMA) in single-channel wireless networks. Mob. Netw. Appl. 1999, 4, 157–174. [Google Scholar] [CrossRef]
- Fullmer, C.L.; Garcia-Luna-Aceves, J.J. Floor Acquisition Multiple Access (FAMA) for Packet-Radio Networks. In Proceedings of the Conference on Applications, Technologies, Architectures, and Protocols for Computer Communication (SIGCOMM ’95), Cambridge, MA, USA, 28 August–1 September 1995; pp. 262–273.
- Bharghavan, V. MACAW: A Media Access Protocol for Wireless LANs. In Proceedings of the ACM SIGCOMM’94 Conference, London, UK, 31 August–2 September 1994; pp. 212–225.
- WHOI. Acoustic Micro-Modem Overview, 2006–2013. Available online: http://acomms.whoi.edu/micro-modem/ (accessed on 24 August 2015).
- Hong, L.; Hong, F.; Guo, Z.; Li, Z. ECS: Efficient Communication Scheduling for Underwater Sensor Networks. Sensors 2011, 11, 2920–2938. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.W.; Cho, H.S. Cascading Multi-Hop Reservation and Transmission in Underwater Acoustic Sensor Networks. Sensors 2014, 14, 18390–18409. [Google Scholar] [CrossRef] [PubMed]
- Noh, Y.; Lee, U.; Han, S.; Wang, P.; Torres, D.; Kim, J.; Gerla, M. DOTS: A Propagation Delay-Aware Opportunistic MAC Protocol for Mobile Underwater Networks. IEEE Trans. Mob. Comput. 2014, 13, 766–782. [Google Scholar]
- Tobagi, F.; Kleinrock, L. Packet Switching in Radio Channels: Part II—The Hidden Terminal Problem in Carrier Sense Multiple-Access and the Busy-Tone Solution. IEEE Trans. Commun. 1975, 23, 1417–1433. [Google Scholar] [CrossRef]
- Syed, A.A.; Heidemann, J. Contention analysis of MAC protocols that count. In Proceedings of the Fifth ACM International Workshop on UnderWater Networks (WUWNet ’10), Woods Hole, MA, USA, 30 September–1 October 2010; pp. 2:1–2:8.
- Varga, A.; Hornig, R. An Overview of the OMNeT++ Simulation Environment. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops (Simutools ’08), Marseille, France, 3–7 March 2008; pp. 60:1–60:10.
- Köpke, A.; Swigulski, M.; Wessel, K.; Willkomm, D.; Haneveld, P.T.K.; Parker, T.E.V.; Visser, O.W.; Lichte, H.S.; Valentin, S. Simulating wireless and mobile networks in OMNeT++ the MiXiM vision. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops, (Simutools ’08), Marseille, France, 3–7 March 2008; pp. 71:1–71:8.
- Wessel, K.; Swigulski, M.; Köpke, A.; Willkomm, D. MiXiM: The physical layer an architecture overview. In Proceedings of the 2nd International Conference on Simulation Tools and Techniques (Simutools ’09), Rome, Italy, 2–6 March 2009; pp. 78:1–78:8.
- Viklund, A. MiXiM: A simulator for wireless and mobile networks using the OMNeT++ simulation engine, 2007–2013. Available online: http://mixim.sourceforge.net (accessed on 24 August 2015).
- Brekhovskikh, L.; Lysanov, Y. Fundamentals of Ocean Acoustics; Springer Series in Electrophysics; Springer: Berlin, Germany, 1982. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shazzad, K.; Tepe, K.; Abdel-Raheem, E. Multi-Hop-Enabled Energy-Efficient MAC Protocol for Underwater Acoustic Sensor Networks. J. Sens. Actuator Netw. 2015, 4, 226-250. https://doi.org/10.3390/jsan4030226
Shazzad K, Tepe K, Abdel-Raheem E. Multi-Hop-Enabled Energy-Efficient MAC Protocol for Underwater Acoustic Sensor Networks. Journal of Sensor and Actuator Networks. 2015; 4(3):226-250. https://doi.org/10.3390/jsan4030226
Chicago/Turabian StyleShazzad, Khaja, Kemal Tepe, and Esam Abdel-Raheem. 2015. "Multi-Hop-Enabled Energy-Efficient MAC Protocol for Underwater Acoustic Sensor Networks" Journal of Sensor and Actuator Networks 4, no. 3: 226-250. https://doi.org/10.3390/jsan4030226
APA StyleShazzad, K., Tepe, K., & Abdel-Raheem, E. (2015). Multi-Hop-Enabled Energy-Efficient MAC Protocol for Underwater Acoustic Sensor Networks. Journal of Sensor and Actuator Networks, 4(3), 226-250. https://doi.org/10.3390/jsan4030226