Adapting Probabilistic Flooding in Energy Harvesting Wireless Sensor Networks




Abstract
:1. Introduction
2. Past Related Work
3. The Energy Harvesting Network System
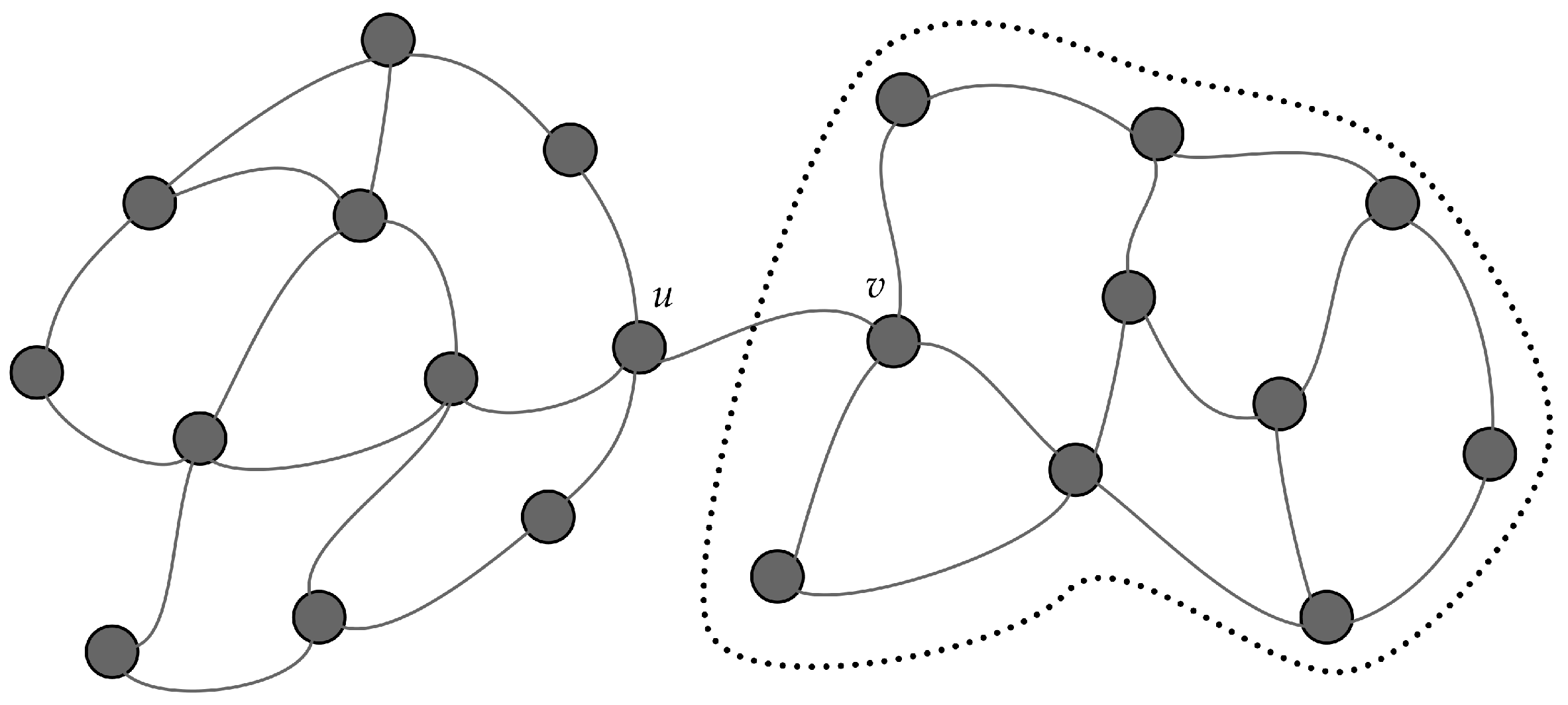
4. Probabilistic Information Dissemination
| Algorithm 1 Robust Probabilistic Flooding RPF(s,q) |
|
|
|
|
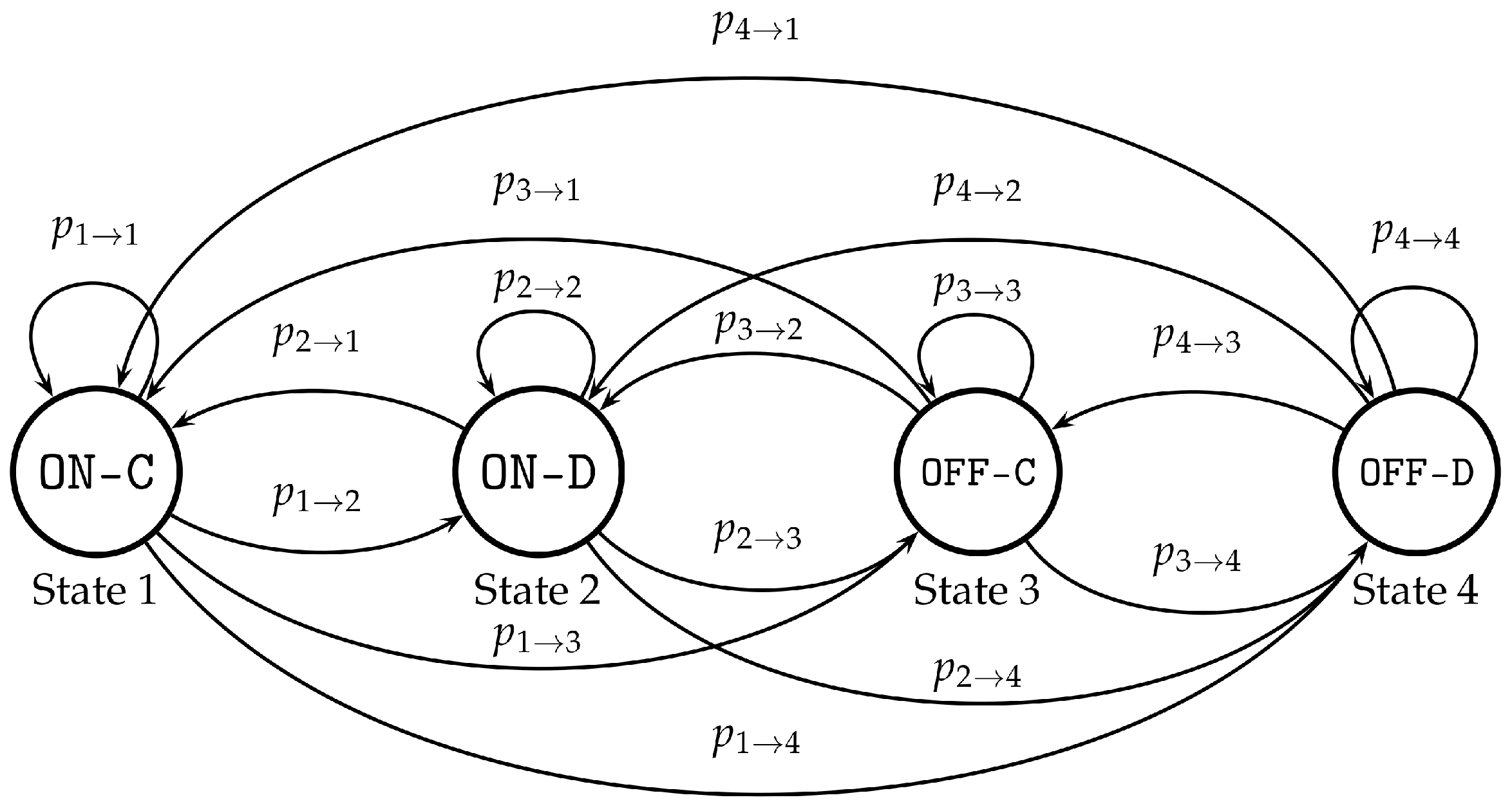
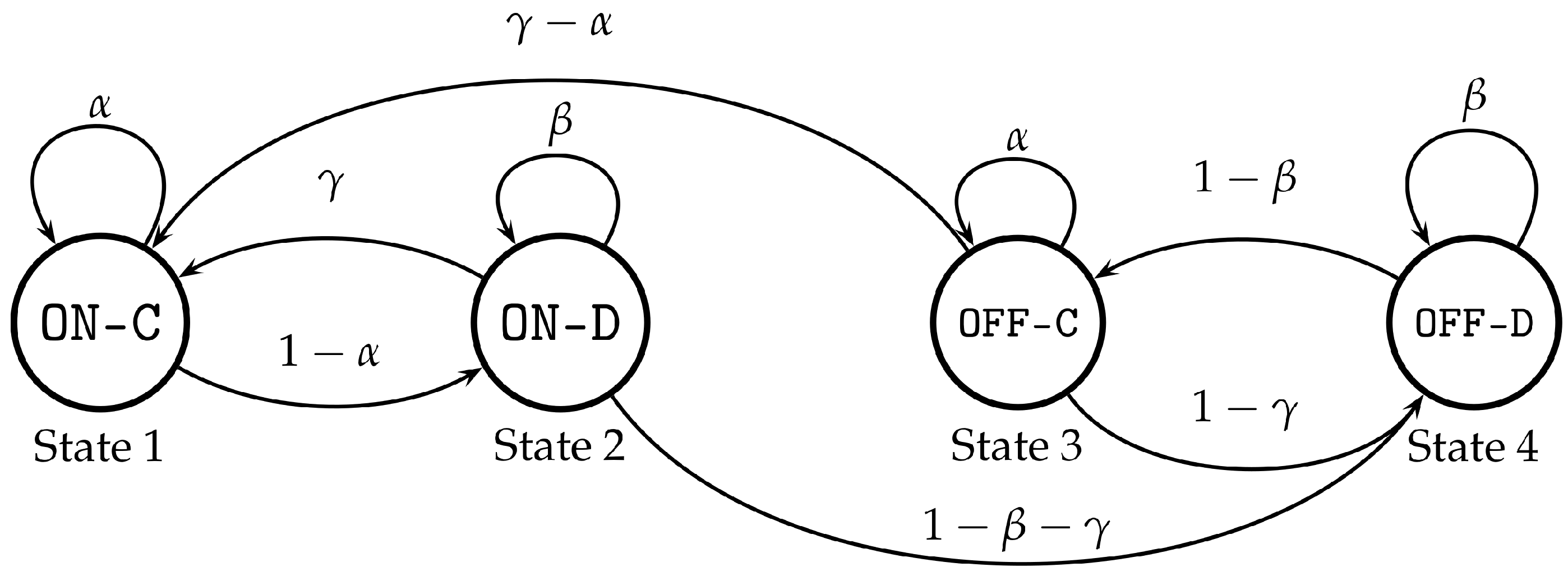
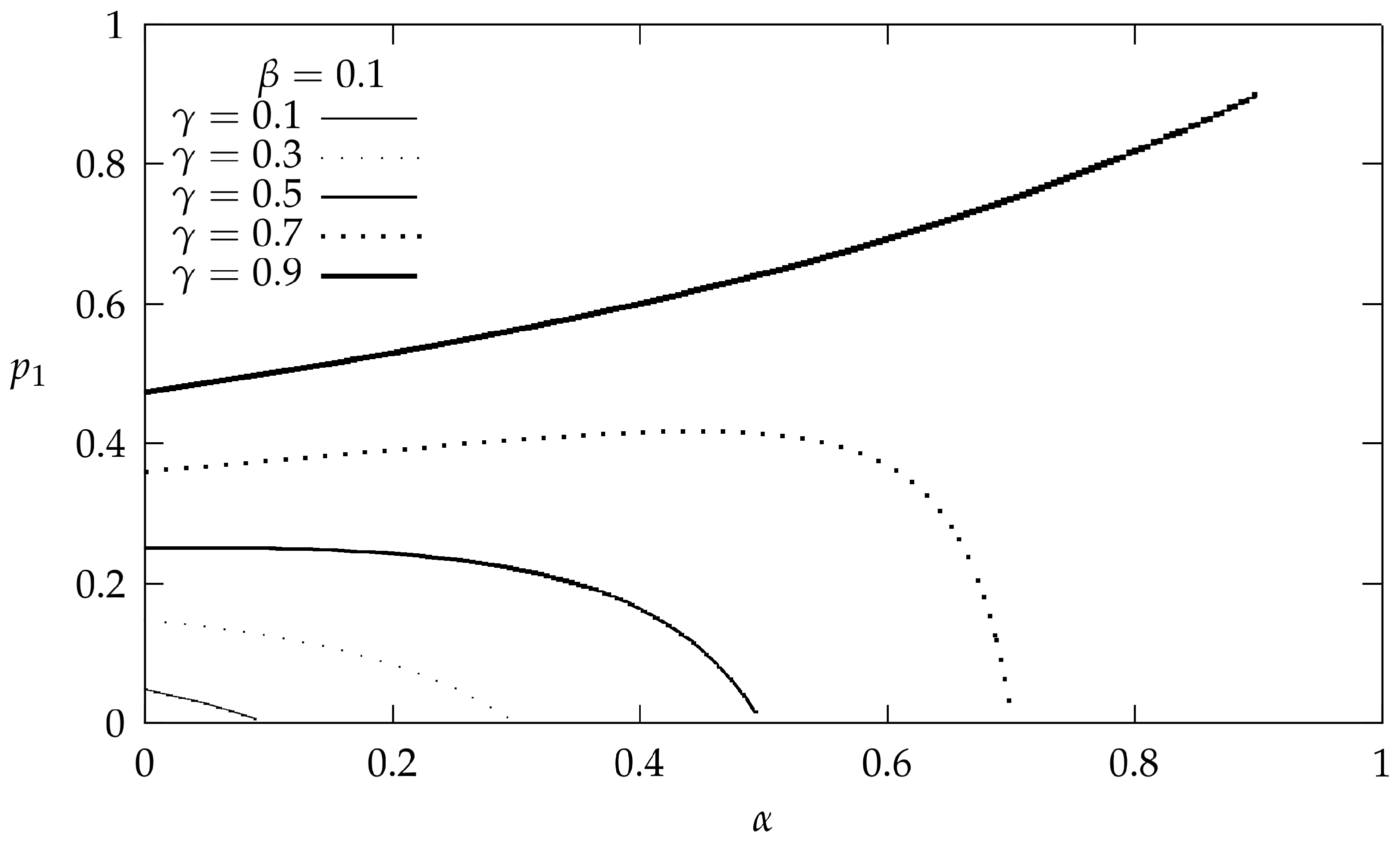
5. Markov Chain Analysis
6. Performance Evaluation
6.1. Simulation Scenarios Evaluation
6.2. Realistic Environment Evaluation
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Akyildiz, I.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Anastasi, G.; Conti, M.; Di Francesco, M.; Passarella, A. Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef] [Green Version]
- Sudevalayam, S.; Kulkarni, P. Energy Harvesting Sensor Nodes: Survey and Implications. IEEE Commun. Surv. Tutor. 2011, 13, 443–461. [Google Scholar] [CrossRef] [Green Version]
- Koufoudakis, G.; Oikonomou, K.; Giannakis, K.; Aïssa, S. Probabilistic flooding coverage analysis for efficient information dissemination in wireless networks. Comput. Netw. 2018, 140, 51–61. [Google Scholar] [CrossRef]
- Kavvadia, E.; Koufoudakis, G.; Oikonomou, K. Robust probabilistic information dissemination in energy harvesting wireless sensor networks. In Proceedings of the 2014 13th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Piran, Slovenia, 2–4 June 2014; pp. 63–70. [Google Scholar]
- Stackhouse, P.W.; Whitlock, C. Surface meteorology and Solar Energy (SSE) release 6.0, NASA SSE 6.0. In Earth Science Enterprise Program, National Aeronautic and Space Administration (NASA), Langley; NASA Langley Research Center: Hampton, VA, USA, 2008. Available online: http://eosweb.larc.nasa.gov/sse (accessed on 5 February 2018).
- Mao, S.; Cheung, M.H.; Wong, V.W. An optimal energy allocation algorithm for energy harvesting wireless sensor networks. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 265–270. [Google Scholar]
- Mohammed, H.M.G.E.D.; El, M.A.E.A.S.; Guindi, R. Novel radio frequency energy harvesting model. In Proceedings of the 2012 IEEE International Power Engineering and Optimization Conference Melaka, Malaysia, Melaka, Malaysia, 6–7 June 2012; pp. 209–213. [Google Scholar]
- Elanzeery, H.; Guindi, R. Frequency survey simulation for developing novel radio frequency energy harvesting model. In Proceedings of the 2012 UKSim 14th International Conference on Computer Modelling and Simulation, Cambridge, UK, 28–30 March 2012; pp. 476–479. [Google Scholar]
- Gorlatova, M.; Wallwater, A.; Zussman, G. Networking low-power energy harvesting devices: Measurements and algorithms. IEEE Trans. Mob. Comput. 2013, 12, 1853–1865. [Google Scholar] [CrossRef]
- Cammarano, A.; Petrioli, C.; Spenza, D. Pro-Energy: A novel energy prediction model for solar and wind energy-harvesting wireless sensor networks. In Proceedings of the 2012 IEEE 9th International Conference on Mobile Ad-Hoc and Sensor Systems (MASS 2012), Las Vegas, NV, USA, 8–11 October 2012; pp. 75–83. [Google Scholar]
- Miozzo, M.; Zordan, D.; Dini, P.; Rossi, M. SolarStat: Modeling photovoltaic sources through stochastic Markov processes. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Cavtat, Croatia, 13–16 May 2014; pp. 688–695. [Google Scholar]
- Ventura, J.; Chowdhury, K. Markov modeling of energy harvesting body sensor networks. In Proceedings of the 2011 IEEE 22nd International Symposium on Personal, Indoor and Mobile Radio Communications, Toronto, ON, Canada, 11–14 September 2011; pp. 2168–2172. [Google Scholar]
- Yang, G.Z.; Yang, G. Body Sensor Networks; Springer: Berlin, Germany, 2006; Volume 1. [Google Scholar]
- Hsu, J.; Zahedi, S.; Kansal, A.; Srivastava, M.; Raghunathan, V. Adaptive duty cycling for energy harvesting systems. In Proceedings of the 2006 International Symposium on Low Power Electronics and Design, Tegernsee, Bavaria, Germany, 4–6 October 2006; pp. 180–185. [Google Scholar]
- Vigorito, C.M.; Ganesan, D.; Barto, A.G. Adaptive control of duty cycling in energy-harvesting wireless sensor networks. In Proceedings of the 2007 4th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Diego, CA, USA, 18–21 June 2007; pp. 21–30. [Google Scholar]
- Elmes, J.; Gaydarzhiev, V.; Mensah, A.; Rustom, K.; Shen, J.; Batarseh, I. Maximum energy harvesting control for oscillating energy harvesting systems. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 2792–2798. [Google Scholar]
- Pimentel, D.; Musílek, P. Power management with energy harvesting devices. In Proceedings of the 2010 23rd Canadian Conference on Electrical and Computer Engineering (CCECE), Calgary, AB, Canada, 2–5 May 2010; pp. 1–4. [Google Scholar]
- Akyildiz, I.F.; Brunetti, F.; Blázquez, C. Nanonetworks: A new communication paradigm. Comput. Netw. 2008, 52, 2260–2279. [Google Scholar] [CrossRef]
- Wang, P.; Jornet, J.M.; Malik, M.A.; Akkari, N.; Akyildiz, I.F. Energy and spectrum-aware MAC protocol for perpetual wireless nanosensor networks in the Terahertz Band. Ad Hoc Netw. 2013, 11, 2541–2555. [Google Scholar] [CrossRef]
- Gurakan, B.; Ozel, O.; Yang, J.; Ulukus, S. Energy cooperation in energy harvesting communications. IEEE Trans. Commun. 2013, 61, 4884–4898. [Google Scholar] [CrossRef]
- Yin, S.; Zhang, E.; Li, J.; Yin, L.; Li, S. Throughput optimization for self-powered wireless communications with variable energy harvesting rate. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 830–835. [Google Scholar]
- Luo, S.; Zhang, R.; Lim, T.J. Optimal save-then-transmit protocol for energy harvesting wireless transmitters. IEEE Trans. Wirel. Commun. 2013, 12, 1196–1207. [Google Scholar] [CrossRef]
- Dang, N.; Bozorgzadeh, E.; Venkatasubramanian, N. QuARES: Quality-aware data collection in energy harvesting sensor networks. In Proceedings of the 2011 International Green Computing Conference and Workshops, Orlando, FL, USA, 25–28 July 2011; pp. 1–9. [Google Scholar]
- Edalat, N. Resource management and task allocation in energy harvesting sensor networks. In Proceedings of the 2012 IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), San Francisco, CA, USA, 25–28 June 2012; pp. 1–2. [Google Scholar]
- Zeng, K.; Ren, K.; Lou, W.; Moran, P.J. Energy-aware geographic routing in lossy wireless sensor networks with environmental energy supply. In Proceedings of the 3rd International Conference on Quality of Service in Heterogeneous Wired/Wireless Networks, Waterloo, ON, Canada, 7–9 August 2006; p. 8. [Google Scholar]
- Hasenfratz, D.; Meier, A.; Moser, C.; Chen, J.J.; Thiele, L. Analysis, comparison, and optimization of routing protocols for energy harvesting wireless sensor networks. In Proceedings of the 2010 IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Computing, Newport Beach, CA, USA, 7–9 June 2010; pp. 19–26. [Google Scholar]
- Lattanzi, E.; Regini, E.; Acquaviva, A.; Bogliolo, A. Energetic sustainability of routing algorithms for energy-harvesting wireless sensor networks. Comput. Commun. 2007, 30, 2976–2986. [Google Scholar] [CrossRef]
- Ren, X.; Liang, W.; Xu, W. Use of a mobile sink for maximizing data collection in energy harvesting sensor networks. In Proceedings of the 2013 42nd International Conference on Parallel Processing, Lyon, France, 1–4 October 2013; pp. 439–448. [Google Scholar]
- Yoshida, M.; Kitani, T.; Bandai, M.; Watanabe, T.; Chou, P.; Seah, W.K.G. Probabilistic data collection protocols for energy harvesting sensor networks. In Proceedings of the 2011 IEEE 36th Conference on Local Computer Networks, Bonn, Germany, 4–7 October 2011; pp. 366–373. [Google Scholar]
- Han, G.; Dong, Y.; Guo, H.; Shu, L.; Wu, D. Cross-layer optimized routing in wireless sensor networks with duty cycle and energy harvesting. Wirel. Commun. Mob. Comput. 2015, 15, 1957–1981. [Google Scholar] [CrossRef]
- Shafieirad, H.; Adve, R.S.; ShahbazPanahi, S. Max-SNR opportunistic routing for large-scale energy harvesting sensor networks. IEEE Trans. Green Commun. Netw. 2018, 2, 506–516. [Google Scholar] [CrossRef]
- Gu, Y.; He, T. Bounding communication delay in energy harvesting sensor networks. In Proceedings of the 2010 IEEE 30th International Conference on Distributed Computing Systems, Genova, Italy, 21–25 June 2010; pp. 837–847. [Google Scholar]
- Cao, Q.; Abdelzaher, T.F.; He, T.; Stankovic, J.A. Towards optimal sleep scheduling in sensor networks for rare-event detection. In Proceedings of the Fourth International Symposium on Information Processing in Sensor Networks (IPSN 2005), Boise, ID, USA, 15 April 2005; pp. 20–27. [Google Scholar]
- Segall, A. Distributed network protocols. IEEE Trans. Inf. Theory 1983, 29, 23–35. [Google Scholar] [CrossRef]
- Stauffer, A.O.; Barbosa, V.C. Probabilistic heuristics for disseminating information in networks. IEEE/ACM Trans. Netw. 2007, 15, 425–435. [Google Scholar] [CrossRef]
- Crisóstomo, S.; Schilcher, U.; Bettstetter, C.; Barros, J. Probabilistic flooding in stochastic networks: Analysis of global information outreach. Comput. Netw. 2012, 56, 142–156. [Google Scholar] [CrossRef]
- Oikonomou, K.; Kogias, D.; Stavrakakis, I. Probabilistic flooding for efficient information dissemination in random graph topologies. Comput. Netw. 2010, 54, 1615–1629. [Google Scholar] [CrossRef] [Green Version]
- Gaeta, R.; Sereno, M. Generalized probabilistic flooding in unstructured peer-to-peer networks. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 2055–2062. [Google Scholar] [CrossRef]
- Banaei-Kashani, F.; Shahabi, C. Criticality-based analysis and design of unstructured peer-to-peer networks as “Complex systems”. In Proceedings of the 3rd IEEE/ACM International Symposium on Cluster Computing and the Grid, Tokyo, Japan, 12–15 May 2003; pp. 351–358. [Google Scholar]
- Tsoumakos, D.; Roussopoulos, N. Adaptive probabilistic search for peer-to-peer networks. In Proceedings of the Third International Conference on Peer-to-Peer Computing (P2P2003), Linkoping, Sweden, 1–3 September 2003; pp. 102–109. [Google Scholar] [Green Version]
- Zanaj, E.; Baldi, M.; Chiaraluce, F. Efficiency of the gossip algorithm for wireless sensor networks. In Proceedings of the 2007 15th International Conference on Software, Telecommunications and Computer Networks, Split-Dubrovnik, Croatia, 27–29 September 2007; pp. 1–5. [Google Scholar]
- Chang, D.; Cho, K.; Choi, N.; Kwon, T.T.; Choi, Y. A probabilistic and opportunistic flooding algorithm in wireless sensor networks. Comput. Commun. 2012, 35, 500–506. [Google Scholar] [CrossRef]
- Hu, R. Efficient probabilistic information broadcast algorithm over random geometric topologies. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Sasson, Y.; Cavin, D.; Schiper, A. Probabilistic broadcast for flooding in wireless mobile ad hoc networks. In Proceedings of the 2003 IEEE Wireless Communications and Networking, New Orleans, LA, USA, 16–20 March 2003; Volume 2, pp. 1124–1130. [Google Scholar]
- Li, Q.; Rong, H.; Sun, W.; Wang, J.; Li, J. A correlation-based energy balanced probabilistic flooding algorithm in wireless sensor network. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Jianping, W.; Huihui, R.; Wei, S.; Qiyue, L. A correlation-based coverage-aware and energy-balanced probabilistic flooding algorithm. Int. J. Sens. Netw. 2017, 25, 207–217. [Google Scholar] [CrossRef]
- Drabkin, V.; Friedman, R.; Kliot, G.; Segal, M. On reliable dissemination in wireless ad hoc networks. IEEE Trans. Dependable Secure Comput. 2011, 8, 866–882. [Google Scholar] [CrossRef]
- Reina, D.; Toral, S.; Jonhson, P.; Barrero, F. Hybrid flooding scheme for mobile ad hoc networks. IEEE Commun. Lett. 2013, 17, 592–595. [Google Scholar] [CrossRef]
- Palmieri, F. A wave propagation-based adaptive probabilistic broadcast containment strategy for reactive MANET routing protocols. Pervasive Mob. Comput. 2017, 40, 628–638. [Google Scholar] [CrossRef]
- Agarwal, M.; Govil, M.; Sinha, M.; Jhankal, A. Energy conservation by improving flooding mechanism in MANET. J. Sci. Ind. Res. 2017, 76, 408–414. [Google Scholar]
- Saeed, T.; Lestas, M.; Pitsillides, A. Adaptive probabilistic flooding for nanonetworks employing molecular communication. In Proceedings of the 2016 23rd International Conference on Telecommunications (ICT), Thessaloniki, Greece, 16–18 May 2016; pp. 1–5. [Google Scholar]
- Saeed, T.; Lestas, M.; Pitsillides, A. Nature inspired node density estimation for molecular networks. Nano Commun. Netw. 2017, 12, 43–52. [Google Scholar] [CrossRef]
- Koseoglu, M.; Bereketli, A.; Yazgi, I.; Yeni, B. Probabilistic broadcast for dense AUV networks. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar]
- Xeros, A.; Lestas, M.; Andreou, M.; Pitsillides, A. Adaptive probabilistic flooding for information hovering in VANETs. In Proceedings of the Vehicular Networking Conference (VNC), Jersey City, NJ, USA, 13–15 December 2010; pp. 239–246. [Google Scholar]
- Mylonas, Y.; Lestas, M.; Pitsillides, A.; Ioannou, P.; Papadopoulou, V. Speed adaptive probabilistic flooding for vehicular ad hoc networks. IEEE Trans. Veh. Technol. 2015, 64, 1973–1990. [Google Scholar] [CrossRef]
- Betoule, C.; Bonald, T.; Clavier, R.; Rossi, D.; Rossini, G.; Thouenon, G. Adaptive probabilistic flooding for multipath routing. In Proceedings of the 2012 5th International Conference on New Technologies, Mobility and Security (NTMS), Istanbul, Turkey, 7–10 May 2012; pp. 1–6. [Google Scholar]
- Margariti, S.V.; Dimakopoulos, V.V. On probabilistic flooding search over unstructured peer-to-peer networks. Peer-to-Peer Netw. Appl. 2015, 8, 447–458. [Google Scholar] [CrossRef]
- Lichtblau, B.; Dittrich, A. Probabilistic breadth-first search-A method for evaluation of network-wide broadcast protocols. In Proceedings of the 2014 6th International Conference on New Technologies, Mobility and Security (NTMS), Dubai, United Arab Emirates, 30 March–2 April 2014; pp. 1–6. [Google Scholar]
- Badreddine, W.; Potop-Butucaru, M. Peak transmission rate resilient crosslayer broadcast for body area networks. arXiv, 2017; arXiv:1702.05031. [Google Scholar]
- Earth Observing Laboratory. MICA2—Wireless Measurement System, 2017. Available online: http://www.eol.ucar.edu (accessed on 27 November 2017).
- Papoulis, A. Probability, Random Variables, and Stochastic Processes; Mcgraw-Hill College: New York, NY, USA, 1999; ISBN 0070484775. [Google Scholar]
- Oikonomou, K.; Koufoudakis, G.; Aïssa, S. Probabilistic flooding coverage analysis in large scale wireless networks. In Proceedings of the 2012 19th International Conference on Telecommunications (ICT), Jounieh, Lebanon, 23–25 April 2012; pp. 1–6. [Google Scholar]
- Penrose, M. Random Geometric Graphs; Oxford University Press: Oxford, UK, 2003; ISBN 9780198506263. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging State | Charging | Discharging | |
|---|---|---|---|
| Operational State | |||
| Operating | ON-C | ON-D | |
| Non-Operating | OFF-C | OFF-D | |
| ℓ | #Neighbors | ||||
|---|---|---|---|---|---|
| Processing current draw | 400 mA |
| Transmit current draw | 27 mA |
| Receive current draw | 10 mA |
| Battery capacity | 100 mAh |
| Data rate | 38.4 kbps |
| Data packet size | 50 bytes |
| Output voltage | 5 v |
| Maximum current | 1000 mA |
| Surface area | 6 cm |
| Efficiency | 0.2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koufoudakis, G.; Oikonomou, K.; Tsoumanis, G. Adapting Probabilistic Flooding in Energy Harvesting Wireless Sensor Networks. J. Sens. Actuator Netw. 2018, 7, 39. https://doi.org/10.3390/jsan7030039
Koufoudakis G, Oikonomou K, Tsoumanis G. Adapting Probabilistic Flooding in Energy Harvesting Wireless Sensor Networks. Journal of Sensor and Actuator Networks. 2018; 7(3):39. https://doi.org/10.3390/jsan7030039
Chicago/Turabian StyleKoufoudakis, George, Konstantinos Oikonomou, and Georgios Tsoumanis. 2018. "Adapting Probabilistic Flooding in Energy Harvesting Wireless Sensor Networks" Journal of Sensor and Actuator Networks 7, no. 3: 39. https://doi.org/10.3390/jsan7030039
APA StyleKoufoudakis, G., Oikonomou, K., & Tsoumanis, G. (2018). Adapting Probabilistic Flooding in Energy Harvesting Wireless Sensor Networks. Journal of Sensor and Actuator Networks, 7(3), 39. https://doi.org/10.3390/jsan7030039