1. Introduction
The capabilities of existing Intelligent Transportation Systems (ITS) can significantly be improved by enabling advanced low-latency infrastructure to vehicular (I2V), vehicular to vehicular (V2V) and vehicular to infrastructure (V2I) communications, which could offer active road safety applications by assisting drivers in critical moments. In order to enable fast and robust vehicular communications several technologies and techniques [
1] have been proposed and tested, but most efforts focus on dedicated short range communications (DSRC) and IEEE standard 802.11p, which forms the regulations for wireless access in vehicular environments (WAVE) [
2,
3]. These standards use dedicated frequency bands for ITS in Europe and the United States to provide the potential solutions for future implementations of communication-based ITS safety applications [
4,
5]. On the other hand, the Third Generation Partnership Project (3GPP) introduced a new standard commonly referred to as LTE-V, LTE-V2X, or cellular V2X. This vehicular communications standard is based on well known cellular standard long-term evolution (LTE), which supports a side link or V2V communications using LTE’s direct interface named PC5 [
6,
7,
8]. For safety-critical applications, vehicles must be equipped with ultra-reliable and ultra-low latency communication systems to share information with infrastructures and other vehicles for triggering appropriate actions, for example, through their electronic driving assistance systems.
In this context, LED-based visible light communication (VLC) has recently drawn huge attention from the communications community due to exciting features which are lacking in common RF-based communication systems, such as, the high degree of integrability in existing infrastructures and the intrinsic directionality of the VLC channel. The latter could allow for the implementation of agile and highly-reconfigurable ad-hoc I2V and V2V subnetworks via directional interconnectivity among endpoints [
9], and becomes a prominent factor in recent laser-based VLC implementations, besides the very large attainable bandwidths exceeding the GHz range [
10,
11]. VLC uses the unregulated visible light spectrum (400–790 THz) for communication, which can be exploited for either high data rates for indoor Li-Fi or pervasive broadcast of short information packets with very low latency, which is especially important in ITS safety-critical applications [
12,
13]. Furthermore, VLC can find applications where radio waves do not provide a suitable solution for wireless connectivity, for instance, due to the presence of strong electromagnetic (EM) interference (heavy industrial facilities), or of particularly sensitive EM equipment (planes, operating rooms, etc.).
Focusing on VLC in ITS, two types of receivers, namely, camera-based and photodiode-based are considered in the literature. Camera based prototypes exploit the tendency of modern vehicles to be equipped with cameras for lane and pedestrian detection, and the limited framerate and noise performances could. However, to overwhelm such issues, several works introduced complex image processing architectures with dedicated image processing hardware [
14] and tracking mechanisms [
15] to attain long cast and reasonable bitrate, often using non-regulated, custom LED arrays as the source to increase the bitrate of the VLC link [
16,
17,
18]. High-speed cameras can also be used to improve the performance of camera-based VLC systems, but they are too expensive and computationally complex to be exploited in the current automotive industry. On the other hand, low-cost dedicated photodetectors are quite efficient regarding noise performances and data rates, and they seem to provide a good, lower-cost alternative for vehicular communications. Recent works focused on either V2V applications with data rates ranging from 20 kbaud [
19] up to 115 kbaud [
20], or I2V [
21,
22,
23] implementations. In particular, in ref. [
24], an I2V2V prototype featured message relaying capabilities to further nodes, with a total distance limited to 18 m and a maximum rate of 15 kbaud. None of the above-mentioned works employed a regular traffic light infrastructure as a VLC source. Furthermore, the end-to-end latency of the VLC chain has not been measured. In photodiode-based VLC, the optical gain of the receiver is typically provided by an additional optical collection system, that reduces the FOV of the receiver, hence limiting the interfering light coming from sides. This system englobes optical concentrators or lenses to focus the incoming light on the photodetector, hence, more energy is collected on the detection area. Consequently, more Signal-to-Noise ratio (SNR) is available at the receiver to perform a demodulation of bits. Therefore, optical lenses can be used to increase the communication distance as well as the performance, in terms of Packet Error Rate (PER), of VLC systems. Fresnel lenses offer good optical performances at a competitive price with respect to standard molded glass aspheric lenses, featuring reduced thickness and weight. Their usage in receiver stages has been reported in former works, reporting attainable distances of few meters at 1kbps in a laboratory prototype [
25], whilst other works focused on design methods for Fresnel lenses in indoor VLC applications [
26]. However, a detailed characterization of performances of photodiode-based VLC systems is lacking, and it would be essential towards the deployment of VLC in realistic ITS applications.
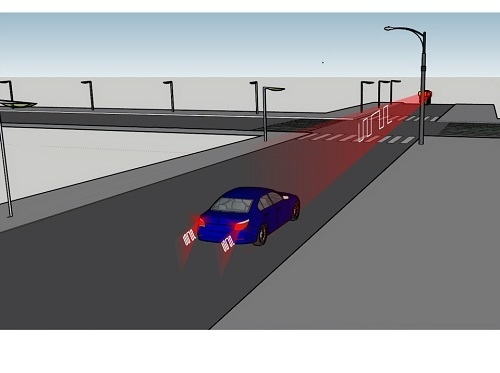
In this paper, we perform an experimental evaluation of a low-cost, Fresnel-lens based VLC I2V prototype system (see
Figure 1) for ITS employing a commercial, regulatory LED traffic light as the source. Data are sent to an incoming receiving node, which consists of a photodetector, incorporating two different low-cost, most commonly available plastic lenses, namely, 2
Fresnel (FR2) and 1
Fresnel (FR1). The receiving node is able to perform Active Decode and Relay (ADR) of messages received from the traffic light to a further incoming node. Data are transmitted at two rates, i.e., 115 and 230 kbaud. Our results show that
outperforms the
lens while offering an error free communication (PER =
) for a range of distances of 6–50 m for 115 kbaud and 6–36 m for 230 kbaud. We find critical configurations in the relative position of traffic light and receiving units, possibly helping in the design of novel, realistic ITS based on VLC wireless links. We also report sub-millisecond latencies in the whole ADR process for both beaconing and message broadcasting in ITS protocols, making it virtually suitable for integrability with 5G technology.
The rest of the paper is organized as follows:
Section 2 introduces the experimental setup. The experimental results are presented and discussed in
Section 3 and then we conclude this paper in
Section 4.
2. Experimental Configuration
The experiments are carried out in a 55 m-long corridor in the Department of Physics and Astronomy of the University of Florence. The experimental setup used to validate our newly developed prototype is shown in
Figure 2. A block diagram of the VLC system is reported in
Figure 2d. The equipment is composed of two main units, Transmitter unit (TX) and Receiver unit (RX).
TX is composed of two sub-units, modulator and light source. The modulator/encoder is realized through a low-cost open source microcontroller-based platform (Arduino DUE) and analog custom-designed current modulator. A commercial traffic light, provided by the company ILES srl in Prato (
https://ilessrl.com), is used as an optical source, which converts the electrical signals to optical signals. The transmitter directly casts the UART data stream through On-Off Keying (OOK) modulation and Non-Return-to-Zero (NRZ) data coding [
27].
RX unit is composed of a photodetector mounted on 105 cm-high tripod, emulating car dashboard height, a comparator/digitizer and a demodulator. The photodetector consists of a photodiode (Thorlabs PDA36A2) with a variable gain and of a lens used to concentrate the light on the area of the photodiode to increase the SNR at the receiver. Two lenses, namely,
(Thorlabs FRP125) and
(Thorlabs FRP232) with different size and focal length, are used as condensing elements. A digital comparator with hysteresis converts the received analog signal to digital, then feeding it to Arduino DUE, which performs demodulation and recovers the information. A 1 Gs/s digital oscilloscope is used for signal recording and analysis. Details on the electro-optical TX-RX system are given in ref. [
13], as they are out of the scope of this paper.
The TX board produces a predefined bit sequence through one of its UART ports, and arranges it into a packet of 6 bytes (2 bytes preamble + 4 bytes payload). Each packet is preceded by 3 equalization bytes, to limit the effects of low-frequency transients on the digitizer/comparator stage, which would otherwise lose the first bits of each packet due to the presence of the AC coupling stage (see below and also Figures 5 and 6). Data packets are encoded using NRZ line coding, carrying 1 bit/symbol and allowing a maximum data rate of 230 Kbps. These encoded data are then fed to the current modulator, which modulates the current supplying the red LED lamp (Lux Potentia, 3 LEDs, 6.5 W nominal) of the traffic light using OOK modulation.
The transmitted signal propagates through the optical channel towards the RX stage. The latter is AC-coupled before the first amplification stage to reject the DC stray light components such as sunlight (during the day a large amount of sunlight can enter the corridor through the windows) or low-frequency, 100 Hz intensity fluctuations coming from artificial lights which are present in the corridor. The amplified signal is then digitized, decoded and analyzed by the Arduino DUE board, which decodes the incoming message and compares it with a stored reference message to determine the PER. As the RX is equipped with ADR capabilities [
13], if a message is correctly received, it can be forwarded to a second modulator for relaying towards the incoming unit through, for example, rear lamps (not taken into account in the present work).
3. Results and Discussion
Experiments are performed by placing the RX stage in various positions in front of a traffic light, for two system configurations; (a) the photodetector optical axis always aims to the traffic light red lamp, known as Optimal system configuration; (b) the photodetector axis is parallel to the floor, known as Flat system configuration (See
Figure 1). Whilst the first configuration features the best SNR (as no angular misalignment between TX and RX optical axes is involved), the latter configuration is the most similar to a realistic scenario where no adaptive tracking mechanism is involved. Two low-cost Fresnel plastic lenses
with a focal length of 25 mm and
with focal length 32 mm are used in RX to focus the incoming light from traffic lamp on the area of the photodiode. The RX is mounted on a precision vertical rotational platform. The performances of the system are evaluated through PER. The reason why we adopt the PER characterization rather than the Bit Error Rate (BER) in this specific application relies on the fact that in ITS applications one of the most critical aspects is the statistical value of latency in critical messages delivery. The latter, in turn, can be directly connected to the average number of lost packets [
13], which is what is measured in a PER analysis.
Also, the PER analysis is typically less demanding from the hardware point of view and does not need for a post-processing of data. Anyhow, we notice that for low error rates and uniform error distribution, PER provides a very good approximation for BER through PER
BER, where N is the packet length [
28]. We measure PER as a function of communication distances between TX and RX, and we quantify the minimum latency of the whole ADR process, which is here defined as the time elapsed between the transmission of first bit in a packet sent by TX and the last bit of the corresponding relayed packet by the ADR stage of RX. The system is tested for both
and
lenses in each configuration in order to compare their performances. The traffic light is placed in a static position and photodetector is moved from 1 to 50 m. To retrieve the PER, a predefined message is sent for
times from traffic light to photodetector. In such configuration, an error-free communication gives an upper bound for PER to
.
In the first set of experiments, the received signal amplitude is recorded for various communication distances up to 50 m for both
and
, and results are shown in
Figure 3. It can be noticed from
Figure 3a that in Optimal system configuration, when no angular misalignment is present, the received signal strength with
is globally higher than with
. This is due to the reason that the diameter of
is twice the diameter of
. The larger optical gain allows the condenser stage to collect more light and convey a larger intensity on the area of photodiode. After a steady increase in the region 3–6 m, which is related to the intensity map cast by the traffic light lamp [
29], the signal strength reduces as distance increases for both lenses reaching 12 mV and 40 mV at 50 m for
and
, respectively. On the other hand, in Flat system configuration, as shown in
Figure 3b, for near distances up to 25 m, the amplitude of the received signal with
is significantly higher than the one received with
. This due to the fact that lenses with shorter focal length provide the RX stage with larger Field of View (FOV), hence more easily collecting light coming from off-axis sources, as it happens, for example, when a car is very close the traffic light. However, for long distances the trend is similar to that of Optimal system configuration (
Figure 3a), the
outperforms the
. At large distances, indeed, the relative angle between RX and TX optical axis reduces to very low values, de facto making this configuration to approach the Optimal case, where no angular misalignment is involved. An amplitude of 10 and 25 mV is recorded at 50 m for
and
, respectively. It is worth noticing that
Figure 3 highlights a remarkable deviation from the pristine 1/
decay behavior in the optical intensity. The 1/
dependency is related to the solid angle given by the input aperture of the RX stage optical element when dealing with spherical sources. Here, the presence of beam-shaping elements (lenses) at the optical source, along with the variable TX-RX and emission angles on the measurement grid make the 1/
decay not necessarily a valid approximation in general (see also [
29]), especially at short distances where the angles in play are large. We also note that one could eventually obtain an indication of the expected performances of the system using the green lamp as TX (not available at the time of measurements) by simply rescaling the amplitude measured for the red lamp by a correction factor (0.6) which could be retrieved from the photosensitivity VS wavelength graphs on the constructor’s website (
www.thorlabs.com). Partial compensation for this decrease in the received amplitude is provided by the larger nominal green lamp power (9 W), to be compared to the 6.5 W provided by the red lamp. Neglecting the different height among the red and green lamps slots in the traffic light case, we expect a global correction factor in the received amplitude of ≃0.83 when a green lamp is used.
We characterize the PER in a second set of experiments. As PER depends on the received signal strength, it only depends, given a certain baudrate, on the detected signal amplitude, which we measure after the RX stage. Hence, we first measure PER as a function of received signal’s amplitude for two baud rates, 115 and 230 kbaud, respectively. Then, this calibration procedure allows us to retrieve the experimental characterization of PER by accurately measuring the signal amplitude map along the whole measurement grid (6–50 m).
Figure 4 reports such analysis as a function of distance, for both
and
lenses, in the Optimal and Flat configurations (panels a–b and c–d, respectively), and for both 115 kbaud (a–c panels) and 230 kbaud (b–d panels). Error bars correspond to a variation of 1 mV in the detected amplitude at RX. We verified in key points at 36, 42 and 50 m that the calibration of PER obtained via the amplitude method agrees with the value obtained through direct measurement of PER within error bars. For better comparison with future outdoor implementations, we notice that our indoor setting could be prone to possible effects of multipath reflections. In our low-baudrate regime, the phase delay introduced by such processes would be negligible with respect to the minimum bit time, hence making eventual reflections positively contribute to the received amplitude, possibly leading to slightly better PERs with respect to the outdoor configuration. However, we expect that eventual reflections would give an appreciable contribution only in the low-SNR regime, i.e., in the very near and very far-field regions.
For performance analysis, the acceptable PER is set to
as recommended by most of the telecommunication applications. Therefore, PER performance for both the lenses is investigated against this threshold. It could be observed from the figure that in Optimal configuration, for both 115 and 230 kbaud,
outperforms
and could achieve a PER =
till 50 m (115 kbaud) and 40 m (230 kbaud). At the same baudrates,
attains such performances up to 42 and 26 m, respectively. In the Flat case, for 115 kbaud, a
is achieved in a range of 18–50 and 16–41 m for
and
, respectively. However, for 230 kbaud, the required PER is unattainable for both lenses and all distances. Our analysis shows that for our Fresnel-lens-based prototype, the most critical region not only corresponds to the far distant one, but also to the very near space surrounding the traffic light. This behavior, which is especially evident in panels c–d where the Flat case is reported, is intimately connected to the large angles involved, requiring very large FOVs, but also to the intrinsic intensity map projected by the traffic light lamp, which conveys very small intensities at short distances [
29].
The designed prototype is further tested for both continuous information broadcast (
Figure 5) and beaconing (
Figure 6), which makes it suitable for both situational information exchange, for example, traffic congestion and alternative routes information, and continuous message broadcast in emergency events, for example, road accidents, incoming rescue vehicles, and bridge breakdowns. The non-trivial difference among the broadcast and beaconing modes, from the optoelectronic point of view, is that the latter, differently from the former, does not grant a constant RMS value of the detected signal, so that the detection of isolated bursts is typically harder due to the presence of transients in the signal, which can be hardly filtered by the AC-coupling of the RX stage. So, the capability of our system to handle both transmission modes represents a key, non-trivial feature, which could be essential in the deployment of VLC technology in realistic ITS applications.
As clearly appearing from our characterization, a very promising aspect of this Fresnel-lens based prototype, besides what has been reported in ref. [
13] with different, more expensive aspheric condensers, is the capability to reliably deliver digital optical information up to 50 m in ITS applications despite the lighter, thinner and more economic optical condenser, yet granting ultra-low latency, that is measured as low as 820
s for 230 kbauds and 1.5 ms for 115 kbaud. Noticeably enough, our Fresnel lens-based VLC chain achieves very low latencies, even lower than those requested by IEEE802.11p standard and newly introduced C-V2X [
30]. Even if our latency values are relative to the final I2V branch of the ITS network and do not consider the core network segment, it is important to remark that latencies of the final segment are relevant in case of ad-hoc networks: whilst the directionality of the VLC channel avoids the need for complex handshaking protocols between an incoming vehicle and the specific infrastructure that is casting the information, latency times of the final segment could reach very large values in RF-based networks, much beyond the end-to-end latency values given in ref. [
30].
4. Conclusions
In this work, we designed and tested a low-cost, low-latency VLC prototype for I2V communications, using a commercial LED-based traffic light as transmitter and a conventional amplified photodiode with low-cost Fresnel lenses as a receiver. Our VLC-based system is based on an open-source microcontroller platform (Arduino Due) and is capable of Active Decode and Relay (ADR) of received information to a further modulation stage to propagate the information to incoming units through, for example, rear car lamps.
We evaluated the PER performance of the system in various configurations for both the 1 and 2 Fresnel lenses. Two baud rates of 115 and 230 kbaud are used for data transmissions. When embedding a 2 Fresnel lens in Optimal configuration, our system attains an error-free transmission (PER ) up to 36 m with sub-millisecond (820 s) latency of the full ADR process at 230 kbaud (50 m for 230 kbaud). For a more realistic Flat system configuration, simulating a car approaching the traffic light without an optical tracking mechanism, the error-free transmission is achieved at 115 kbaud with 2 lens and above 24 m. If only PER = is required, instead, the 18–50 m range can be covered. We also tested the VLC Fresnel-based system for both the beaconing of situational information and event-triggered message broadcast, finding it suitable for both modes of transmission. The noticeable low-latency feature of this prototype makes it integrable with current 5G-based C-V2X Intelligent Transportation Systems.
For the future, we are planning outdoor measurement campaigns for both I2V, V2V and Infrastructure-to-Vehicle-to-Vehicle (I2V2V) communications. In addition, our system will be tested for various environmental conditions.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





