1. Introduction
In recent years, with the rise of environmental protection awareness and the exhaustion of petroleum, natural gas, coal mines and other forms of energy, scientists have begun searching for environmentally-friendly and sustainable alternative energy. For scientists, solar power has become one of the ideal forms of alternative energy as it is not bound by geographical conditions and is easily installed. In order to realize energy independence and reduce carbon emissions to alleviate global warming, photovoltaic power generation that does not rely on imports has become one of the renewable energies actively developed by the world’s governments. The governments around the world have also set their own capacity goals. In order to achieve these goals, an appropriate MPPT controller has been designed to increase the power generation utilization of photovoltaic power generation systems.
The conventional algorithms generally applied to track the maximum power of PVMAs include perturbation and observation (P&O) [
1,
2,
3] and incremental conductance (INC) [
4,
5]. These two conventional approaches, while being able to effectively track the MPPs when PVMAs operate under normal working conditions, when PVMAs are shaded, these conventional approaches may only track the LMPPs rather than the GMPP. Thus, the power generation efficiency of PVMAs is reduced. Therefore, the problem of tracking the maximum power point when shading occurs in the photovoltaic module cannot be solved [
6].
To address the aforesaid issue, in recent years, some solutions for determining the optimal values have been proposed which reduce the probability that local optimal solutions are obtained during the solution process. For instance, an efficient hybrid starling murmuration optimizer that combines dynamic opposition, a Taylor-based optimal neighborhood strategy, and a crossover operator (DTCSMO) [
7], an efficient enhanced modified chameleon swarm algorithm termed MCSA [
8] and an enhanced hierarchical guided slime mould algorithm called HG-SMA [
9] etc. have been developed. While these optimization algorithms may effectively address the issue of optimal solutions, there is no practical case for tracking the GMPP of PVMAs when multiple peak values appear in the P-V characteristic curves.
In order to solve the GMPP tracking problem under the condition that the PVMA module is partially shaded, many practical smart maximum power tracking controllers have been proposed and applied to solve the problem [
10,
11,
12,
13,
14,
15,
16,
17]. This is because the smart maximum power tracking controller can search the GMPP generated in the nonlinear multi-peak P-V characteristic curve under the condition that the PVMA module is partially shaded. The more commonly used smart methods include particle swarm optimization (PSO) [
11,
12,
13], ant colony optimization (ACO) [
14,
15,
16], genetic algorithms (GA) [
17,
18,
19,
20], and cuckoo search algorithms (CSA) [
21,
22], etc. The literature indicates that the smart algorithm-based MPPT controllers have a better steady-state response and tracking response compared with traditional methods. Additionally, when the photovoltaic module is partially shaded, the GMPP can be accurately and quickly tracked, unlike traditional method-based MPPT controllers that can only track the LMPP. However, these smart maximum power tracking controllers adopt fixed parameter values in the iterative formulas adopted, so there is still room for improvement in terms of the speed of dynamic tracking responses and the performance of steady-state tracking.
The improved artificial bee colony (I-ABC algorithm) [
23] combining the artificial bee colony algorithm and the perturb and observe (P&O) method has the advantage that the GMPP is searched via the bee colony algorithm, and the correct direction for the next tracking is determined by the P&O method. While this approach reduces the issue of tendency where local optimal solutions are obtained during the solution process and addresses the issue that the P&O method is unable to track the MPPs if the PVMAs are abnormal, the computation is more complex, and the tracking responses are not fast enough. Additionally, the conventional cuckoo search (CS) can be improved by adjusting the step factors of CS depending on the slopes and iterations of the PVMAs’ P-V characteristic curves [
24]. While the GMPPs may be tracked faster and more precisely when partial modules are shaded in a PVMA and multiple peak values are generated for the P-V characteristic curve, the improved CS is only applicable in the simulation phase. Practical testing results for PVMAs under different connection configurations and shading ratios may enable the improved CS to track the GMPP in less time and improve the power generation efficiency of the photovoltaic power generation system.
Although Chao and Rizal [
25] proposed a MPPT controller with a new GA and ACO hybrid algorithm, the proposed MPPT controller also demonstrates the characteristics of GA and ACO algorithms. In particular, the GA has excellent features when searching for the best solution and enabling the system to slowly converge. When used independently, more computation time is needed, possibly because there are more populations, resulting in the disadvantage of a longer tracking time [
19]. On the other hand, ACO features the ability to quickly search the subspace and converge to the best non-global solution in advance. Hence, the incorporation of GA can complement the ACO algorithm, thereby enhancing the speed of maximum power tracking and enabling the PVMA to output the global maximum power. Based on the above reasons, an improved GA-ACO MPPT controller is proposed in this paper. The same circuit structure and tracking steps as [
25] were also employed. The optimization of the GA-ACO parameters differs depending on the P-V characteristic curves generated under different shading conditions of PVMAs, and thus, no principle can be found for the parameter optimization. Therefore, it is learnt in tests that when the tracking approaches the MPP and as the slope of the P-V characteristic curve declines, the Pheromone evaporation rate
ρ and the Gaussian standard deviation
x increase; and the
ρ and
x parameters are required to be greater as MPP is approached. In contrast, the farther the MPP is, the more
ρ and
x must decrease as the slope of the P-V characteristic curve increases. Therefore, the optimal adjusted value of the Pheromone evaporation rate, Δ
ρ, and the optimal adjusted value of Gaussian standard deviation, Δ
x, may be obtained via multiple simulations based on the slope values of P-V characteristic curves of PVMAs. Through the location of the work point, the slope of the P-V characteristic curve was calculated to automatically adjust the Pheromone evaporation rate
ρ and the Gaussian standard deviation
x in the iterative formula. The global maximum power tracking time was reduced to obtain better steady-state responses.
2. The Shading Characteristics of a PVMA
The output power of a photovoltaic module changes with the environment, weather and temperature. In the PVMA, any shaded module will affect the total output power, because each part of the module in the PVMA is connected in series [
26]. Therefore, even if a photovoltaic module is shaded in series, the output current of the entire PVMA is also affected. Using MATLAB software and under the standard test conditions (STC) (solar irradiance: 1000 W/m
2, air mass (AM): 1.5 and temperature: 25 °C), the I-V and P-V characteristic curves of the photovoltaic module array were simulated.
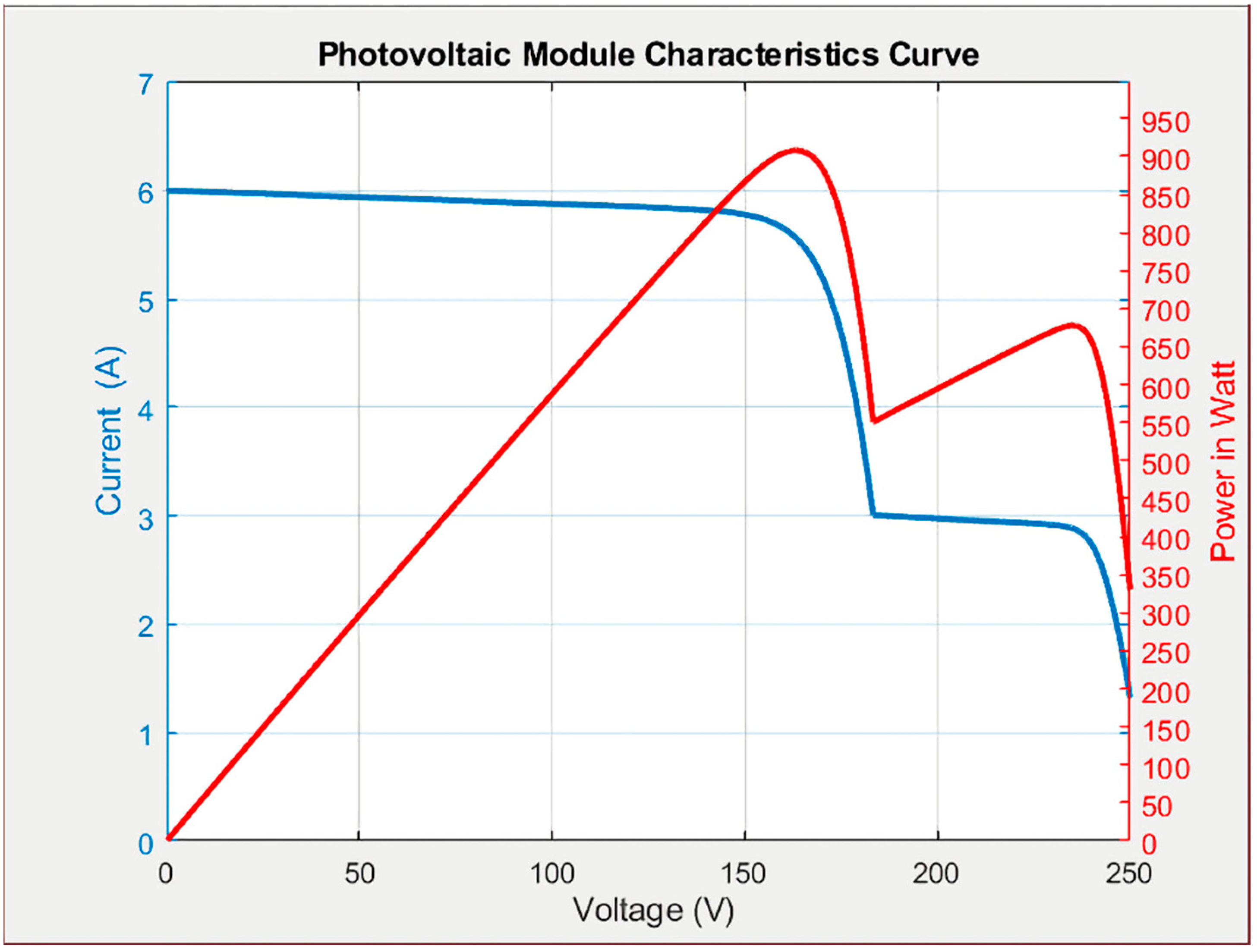
Figure 1 illustrates the P-V and I-V characteristic curves of a four photovoltaic module array with one module under 50% shade [
26]. Because the photovoltaic module array consists of four photovoltaic modules in series, one of which is shaded by 50%, with the rest unshaded, two peaks appear in the P-V characteristic curve of the PV module array, and there is a considerable decrease in the maximum power output, as shown in the P-V characteristic curve. A similar pattern is observed in other situations. For any shading occurring on a photovoltaic module array, there will be more than one maximum power point (MPP) observed in the power-voltage (P-V) characteristic curve of the photovoltaic module array. However, only the local maximum power point (LMPP) can be tracked by the traditional maximum power point tracker, but not the global maximum power point (GMPP). Therefore, in this paper, an intelligent maximum power point tracker based on an improved GA-ACO algorithm is presented to overcome this problem.
4. Simulation Results
First, the MATLAB software was adopted to carry out maximum power tracking simulation by applying the improved GA-ACO algorithm to the photovoltaic module array (PVMA). The simulation results obtained from traditional GA-ACO, ACO and P&O MPPT controllers were compared for performance. The electrical parameter specifications of the photovoltaic module in this paper are shown in
Table 4. As shown in
Table 4, four photovoltaic modules were configured as four-series/one-parallel arrays and a two-series/two-parallel array. Under the same temperature condition, maximum power tracking simulation under five different shading conditions was carried out. It can be observed in
Table 5 that under the five different shading conditions, the P-V characteristic curves obtained from the simulation showed different numbers of peaks. Then, through simulation, the proposed improved GA-ACO MPPT method under five different shading conditions was verified to be superior to the other traditional methods.
The parameter setting values of the improved GA-ACO, traditional GA-ACO, ACO and P&O MPPT methods adopted for the simulations in this paper are shown in
Table 6.
4.1. Case 1: 0% Shading + 0% Shading + 0% Shading + 0% Shading
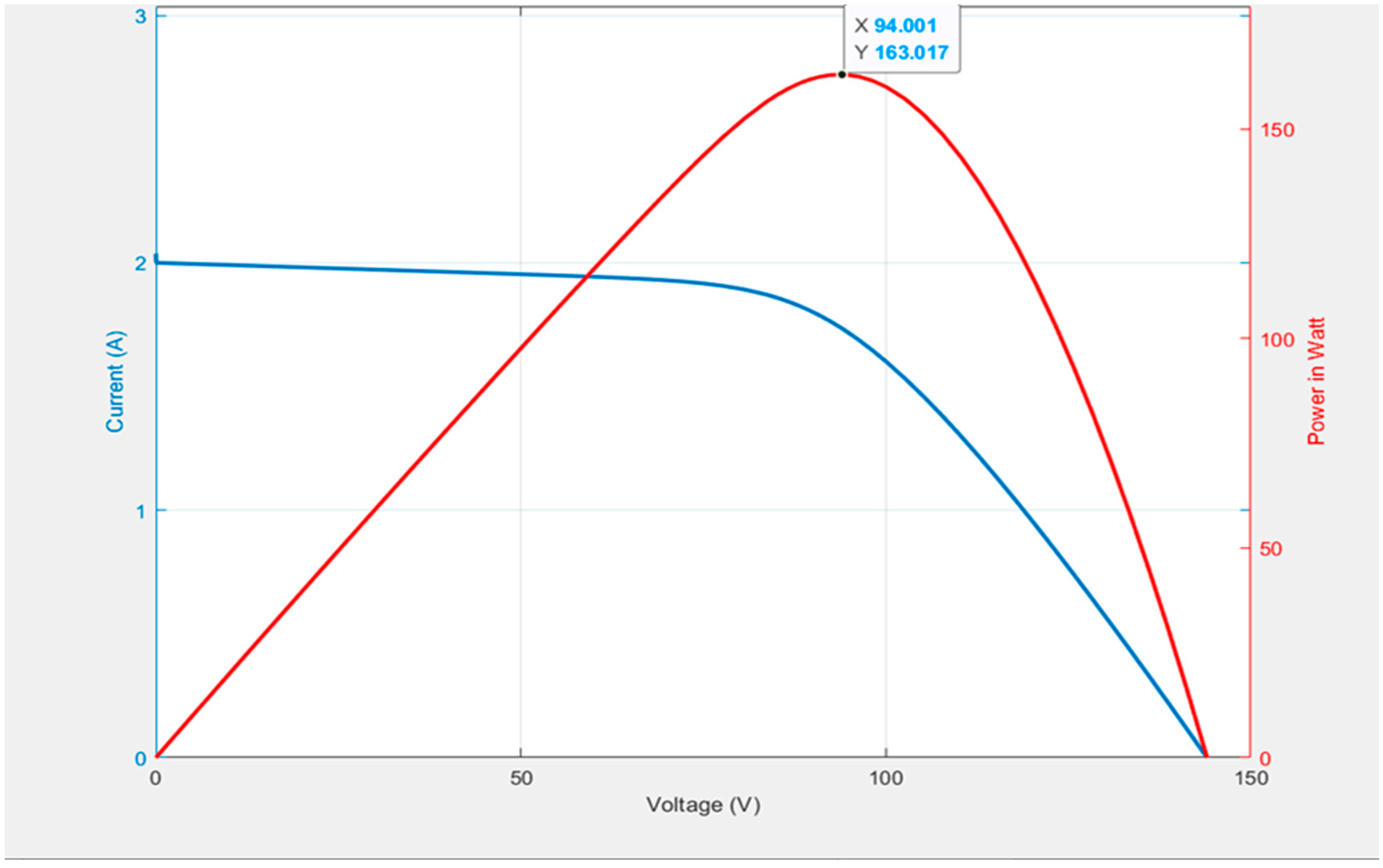
Figure 4 shows the four modules in series adopted to simulate the P-V and I-V characteristic curves of the photovoltaic module array under the condition of no shading through the MATLAB software. Since the photovoltaic module is in series, the voltages and powers are added. Therefore, it can be observed from
Figure 4 that the voltage of the maximum power point and the maximum power point value are four times those of a single photovoltaic module. The simulation results in
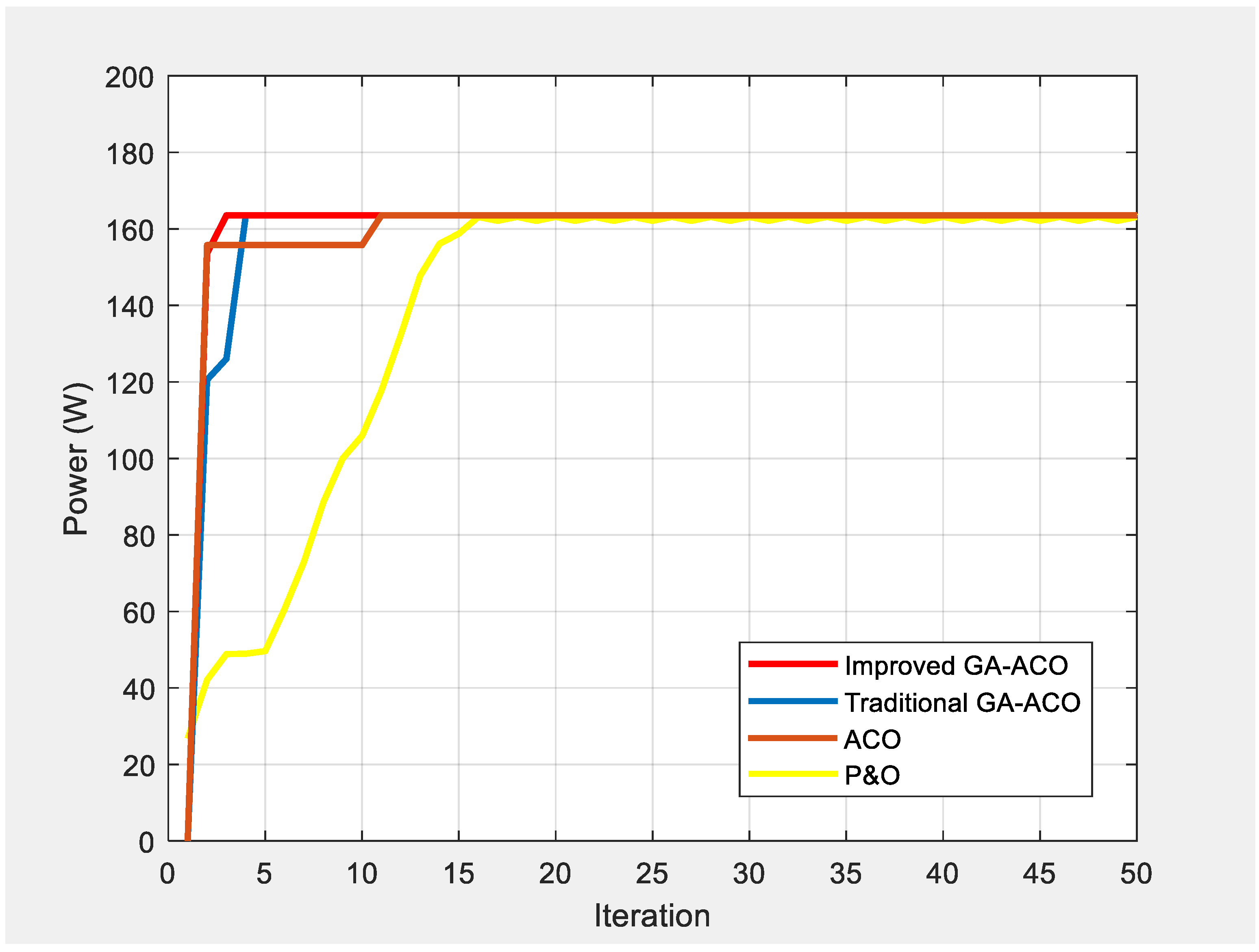
Figure 5 show that the improved GA-ACO managed to track the GMPP through just one iteration. On the other hand, the traditional GA-ACO, ACO, and P&O methods required 3, 10 and 16 iterations to track the GMPP. In addition, the P&O method continued to oscillate near the maximum power point.
4.2. Case 2: 0% Shading + 35% Shading + 35% Shading + 35% Shading
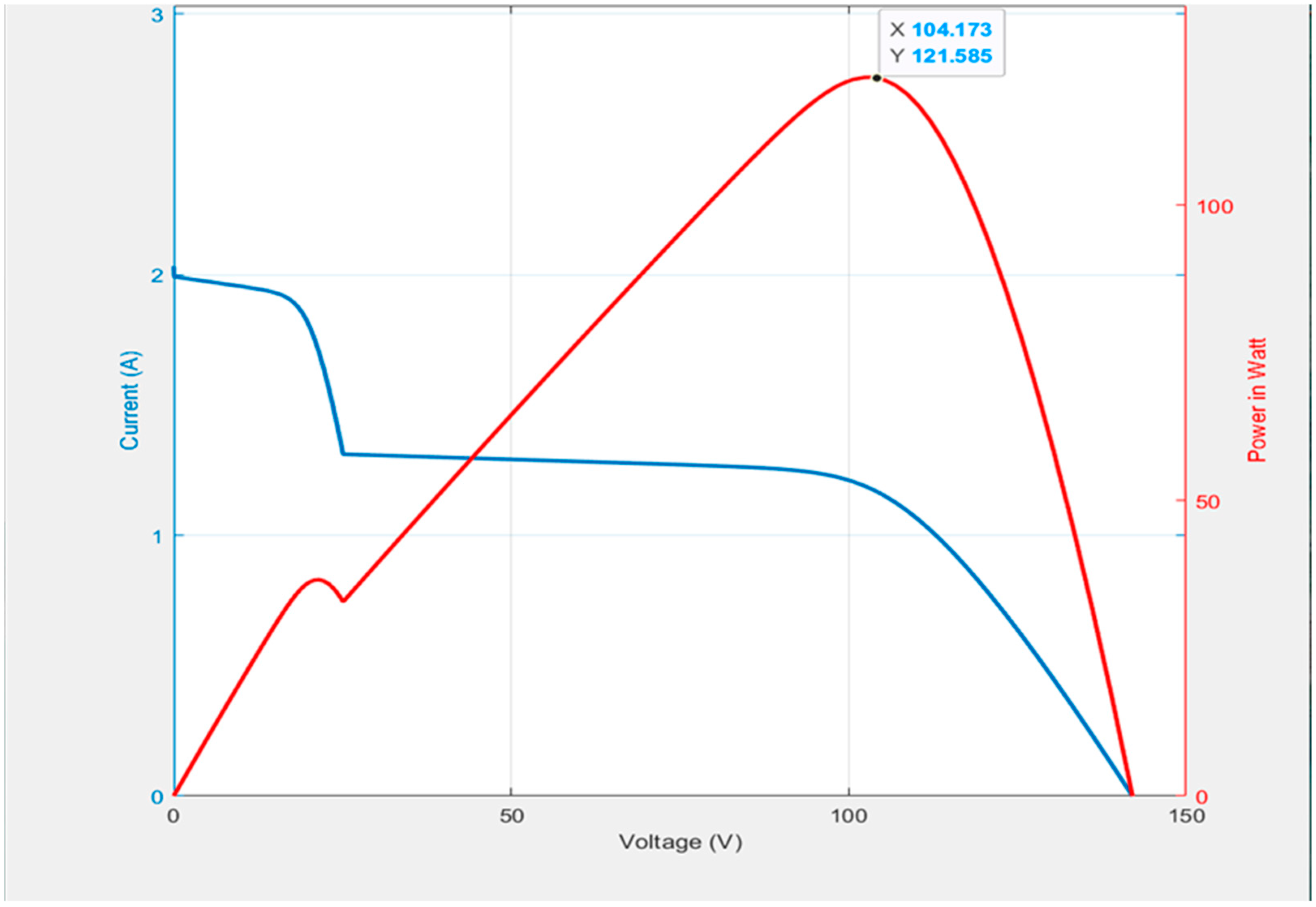
Figure 6 shows the simulation results when four photovoltaic modules in series are adopted and the shading ratio of the three photovoltaic modules is 35%. When one photovoltaic module is completely unshaded, the P-V and I-V characteristic curves are simulated through MATLAB software. It can be observed in
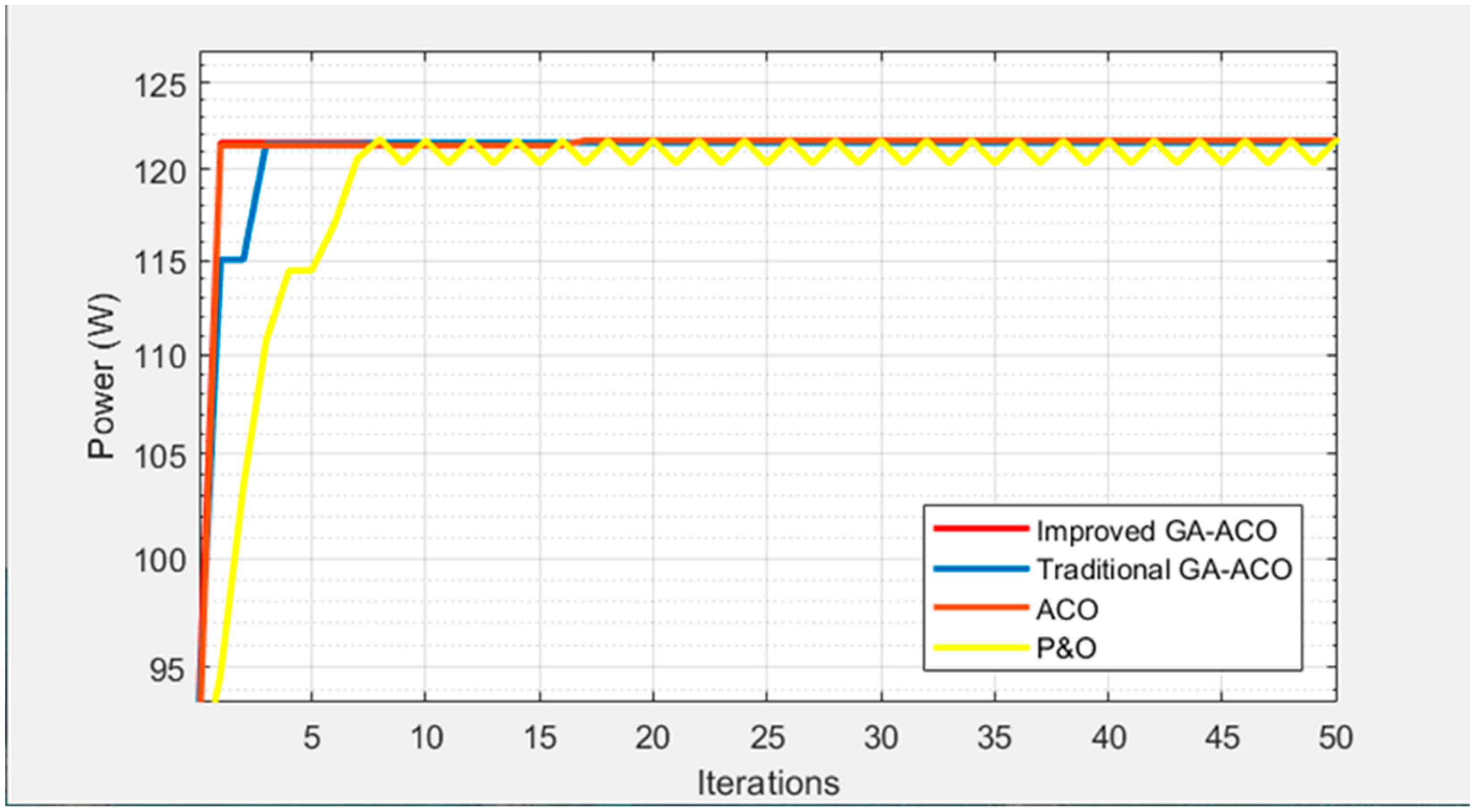
Figure 6 that double-peak values appeared with a GMPP of 121.6 W and a GMPP voltage of 104.2 V. It can be observed from the simulation results in
Figure 7 that the improved GA-ACO managed to track the GMPP with just one iteration. On the other hand, the traditional GA-ACO and ACO methods required 3 and 17 iterations to track the GMPP. As for the P&O method, the GMPP could not even be tracked.
4.3. Case 3: 0% Shading + 25% Shading + 40% Shading + 40% Shading
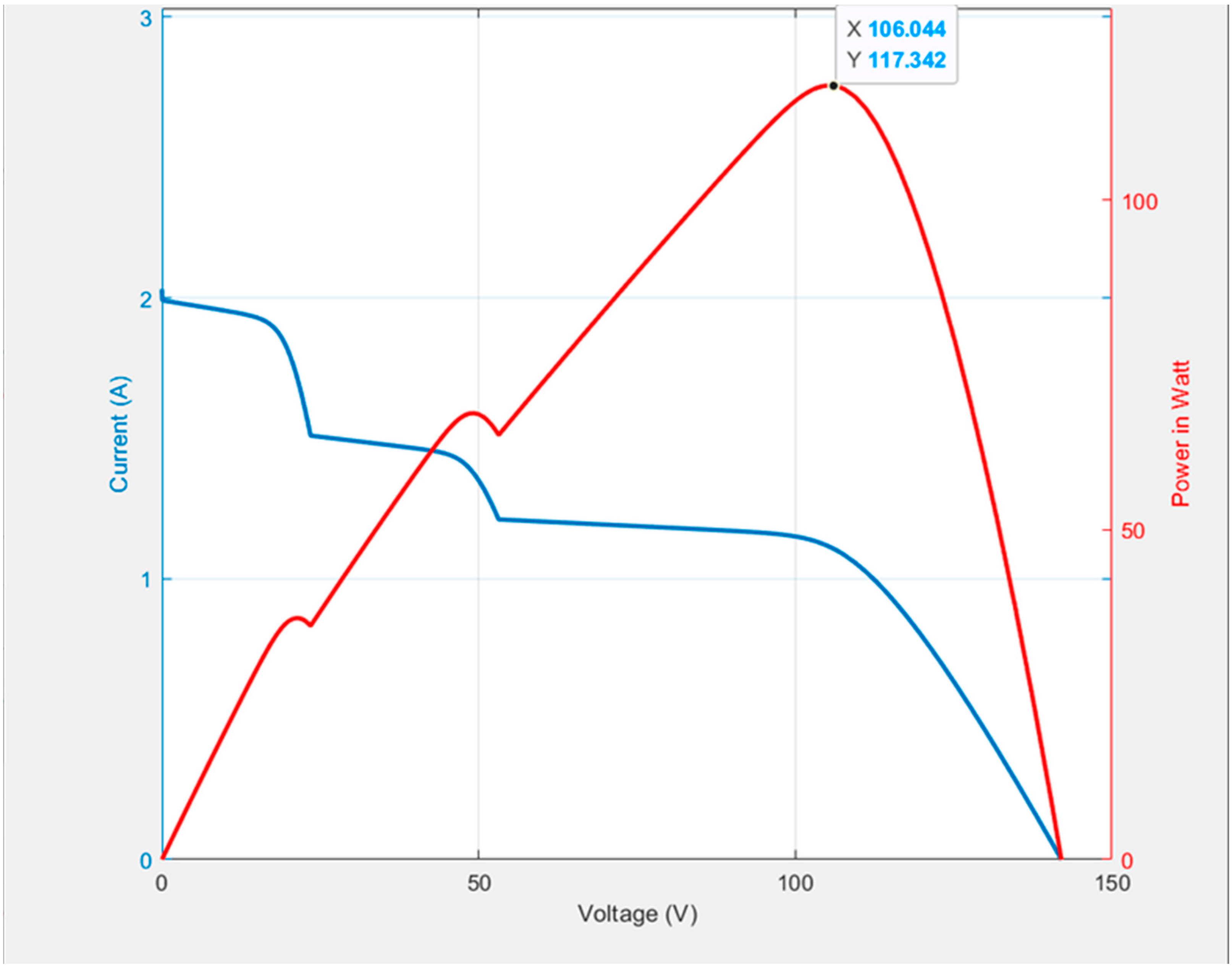
When four photovoltaic modules in series are adopted, the shading ratios of the three photovoltaic modules are 40%, 40% and 25%, respectively. When one photovoltaic module is completely unshaded, the P-V and I-V characteristic curves simulated through MATLAB software are shown in
Figure 8. It can be observed from
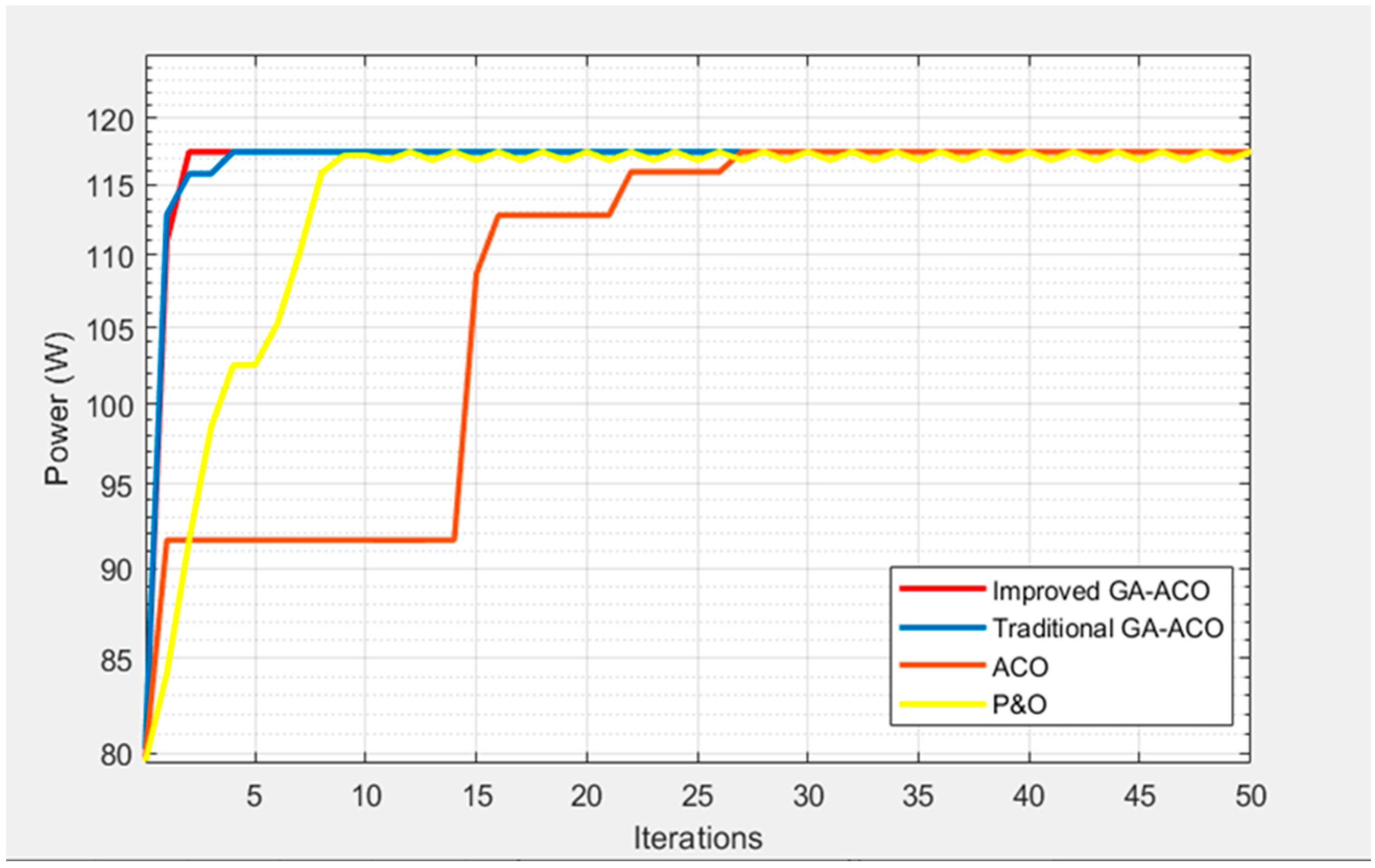
Figure 8 that three-peak values appeared in the P-V characteristic curve, with the GMPP of 117.8 W and the GMPP voltage of 106.1 V. The simulation results in
Figure 9 show that the improved GA-ACO method managed to track the GMPP after just two iterations. On the other hand, the traditional GA-ACO and ACO methods required 4 and 27 iterations to track the GMPP. As for the P&O method, the GMPP still failed to be tracked.
4.4. Case 4: 0% Shading + 20% Shading + 35% Shading + 50% Shading
The shading ratios of the three modules set in this case are 20%, 35% and 50%, respectively. One module is without shading.
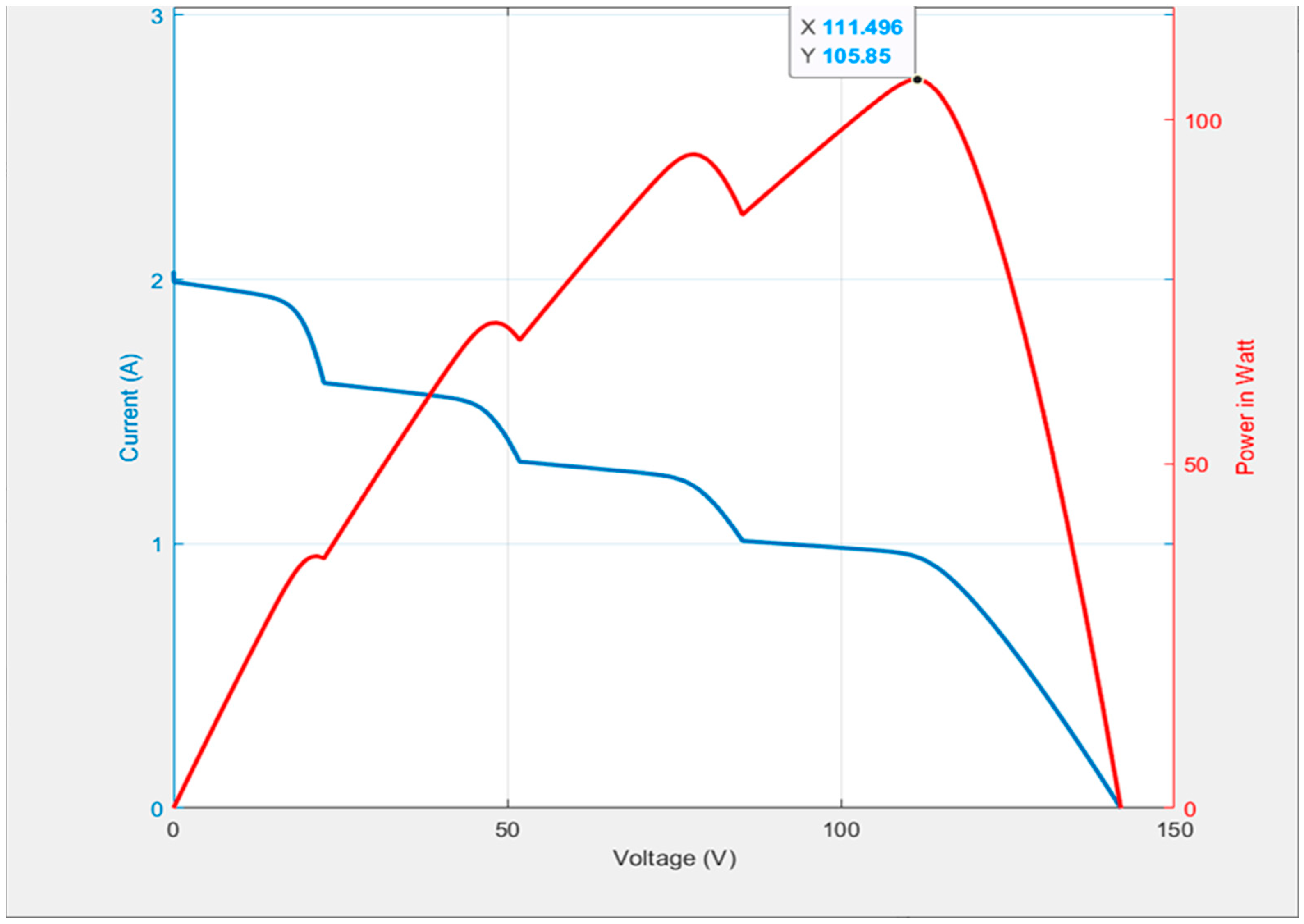
Figure 10 shows the Case 4 simulation results of the P-V and I-V characteristic curves. It can be observed from the simulation results that four peaks appeared in the P-V characteristic curve, while the GMPP occurred at 105.8 W.
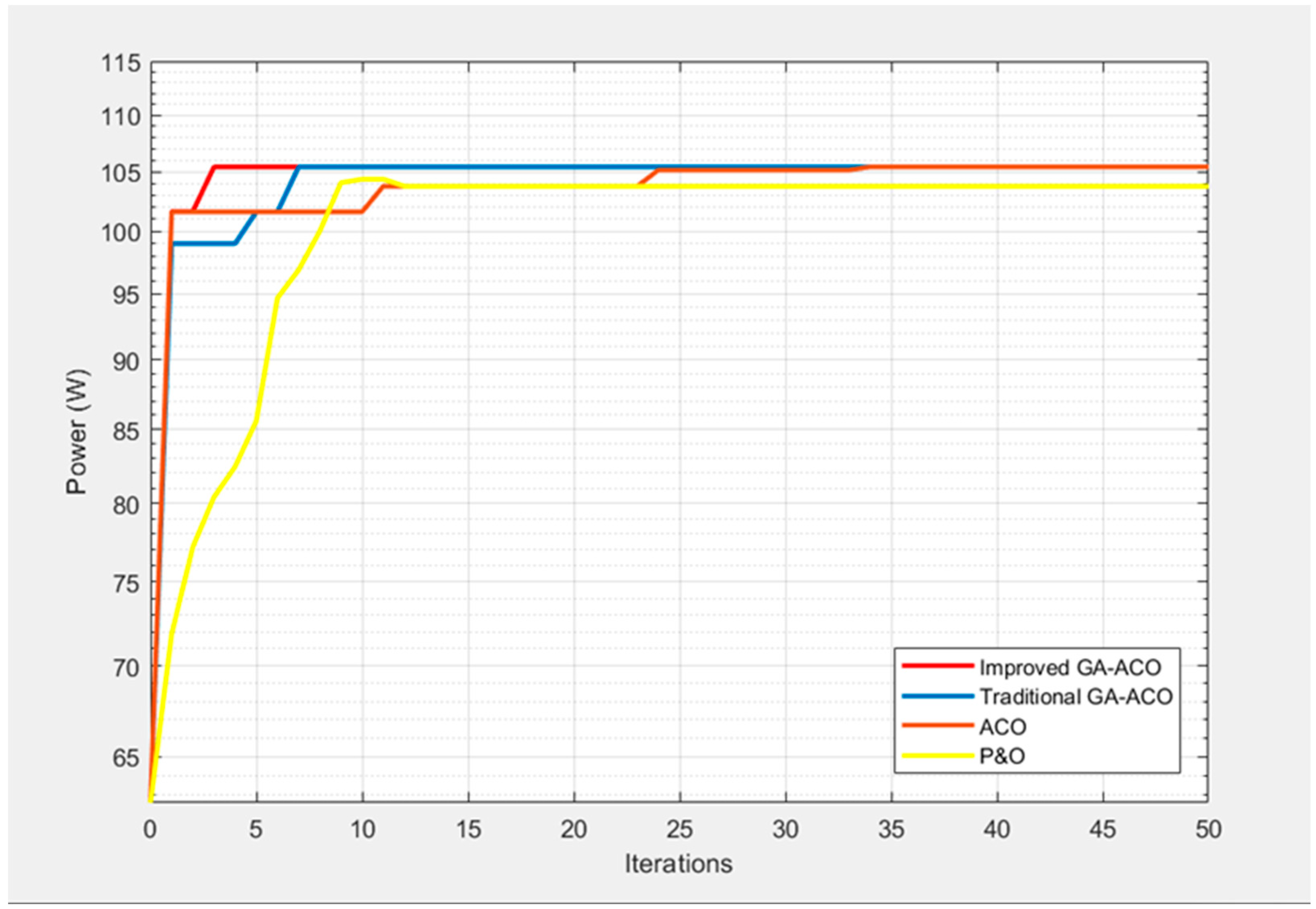
Figure 11 shows the simulation results of the improved GA-ACO, traditional GA-ACO, ACO and P&O MPPT methods. It can be observed from
Figure 11 that even though four peaks appeared in the P-V characteristic curve, the improved GA-ACO method managed to track the GMPP with just three iterations. On the other hand, the traditional GA-ACO and ACO methods required 7 and 34 iterations to track the GMPP. As for the P&O method, the GMPP still failed to be tracked with a limited set of iterations.
4.5. Case 5: (0% Shading + 35% Shading) // (35% Shading + 35% Shading)
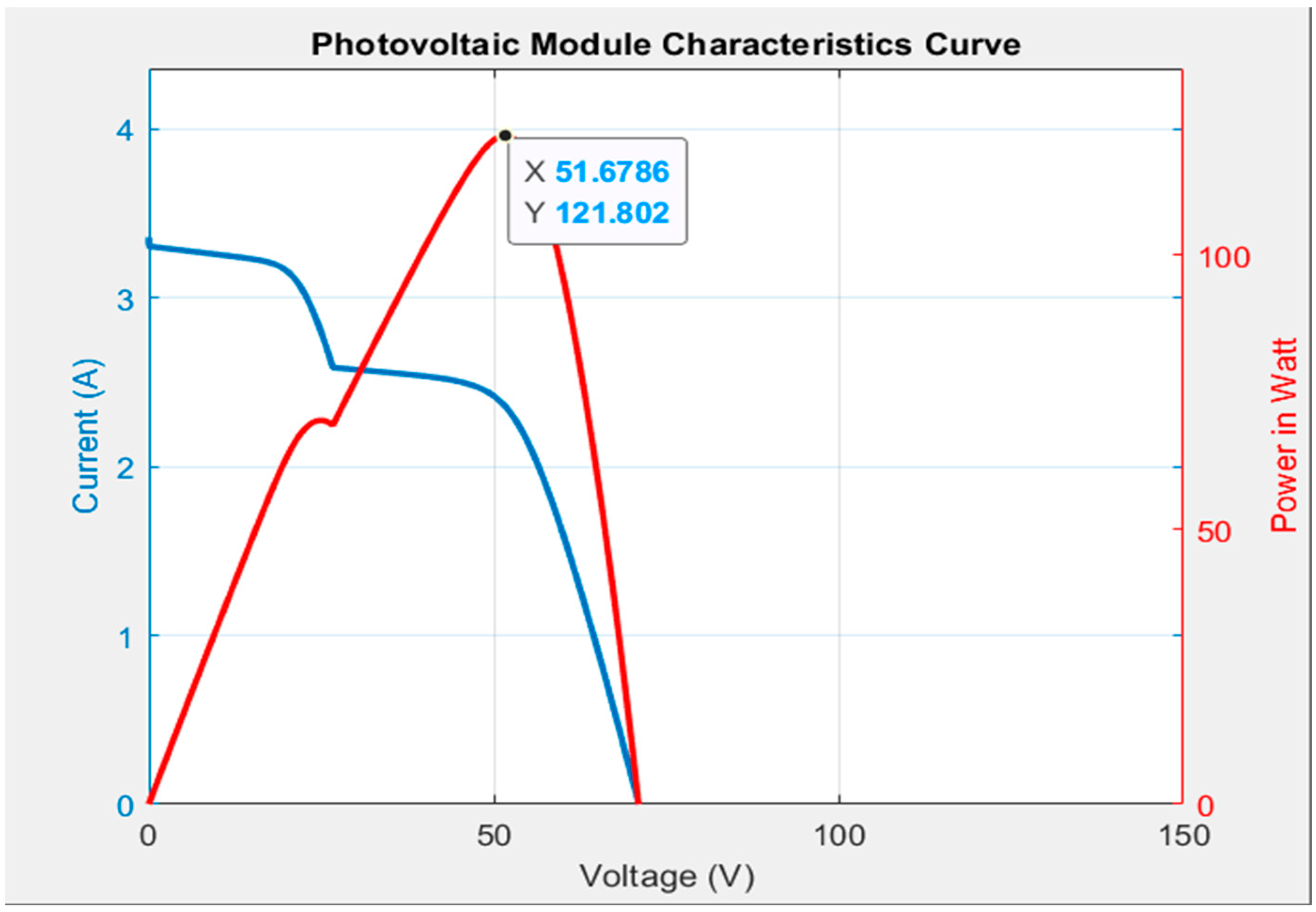
Figure 12 shows Case 5 P-V and I-V characteristic curves obtained from the simulation. The module array is configured as a two-series/two-parallel array. One of the modules is under the condition of 0% shading, while the rest of the modules are under the condition of 35% shading. Since the photovoltaic module is connected as a two-series/two-parallel array, only two peaks are produced in the P-V characteristic curve. The power values of two of the peaks are 69.29 W and 121.75 W, respectively.
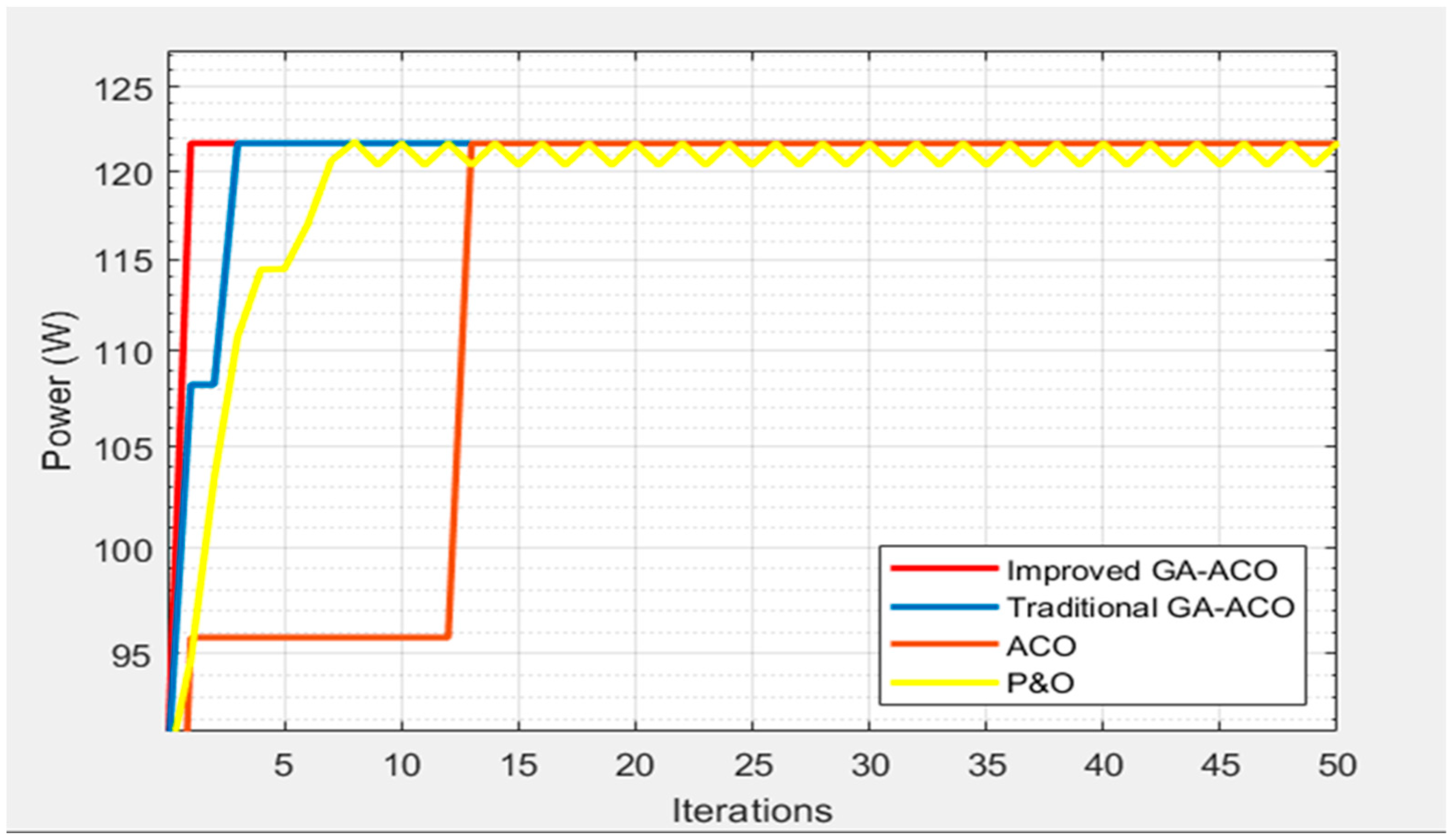
Figure 13 shows that the improved GA-ACO method managed to track the GMPP with just one iteration. On the other hand, the traditional GA-ACO and ACO methods required 3 and 13 iterations, respectively, to track the GMPP. On the other hand, the P&O method still failed to successfully track the GMPP. It can be observed from the simulation results in
Figure 13 that even though the PVMA in Case 5 was changed, it was also confirmed that the tracking speed using the improved GA-ACO method proposed in this paper was not affected by changes in the connection method.
The simulation results of the five cases above show that the improved GA-ACO method is superior to the traditional GA-ACO, ACO and P&O methods in terms of performance. In addition, under each case, the improved GA-ACO algorithm managed to track the GMPP with fewer iterations. On the other hand, the traditional GA-ACO and ACO algorithms required more iterations to track the GMPP. As for Cases 1, 2, 3 and 5, although the P&O method managed to track GMPP, it oscillated to and fro near the maximum power point, while in Case 4, it was unable to track GMPP with a limited set of iterations. In addition, based on the five cases selected, maximum power tracking was conducted 50 times using the improved GA-ACO, traditional GA-ACO, ACO and P&O MPPT methods. The numbers of iterations of GMPP tracked each time were added up and averaged, as shown in
Table 7.
Table 7 shows that although the three algorithms of the improved GA-ACO, traditional GA-ACO and ACO can track the GMPP among the five cases, the improved GA-ACO method required on average fewer iterations compared with those of the traditional GA-ACO and ACO algorithms. This demonstrates that the proposed improved GA-ACO MPPT method has better tracking performance. In particular, the higher the number of peaks in the P-V characteristic curve, the greater the differences in the tracking performance.
In fact, the more complex the algorithm is, the slower the calculation will be. We can conclude from the calculation time comparison that the proposed improved GA-ACO MPPT has the slowest calculation time. Even though the proposed improved GA-ACO MPPT is the slowest to calculate an iteration, this algorithm is the fastest to reach the GMPP because it requires fewer iterations. The iterations of the proposed improved GA-ACO are the least compared with the other three algorithms. The detailed comparison is shown in
Table 7 which demonstrates that the proposed GA-ACO MPPT is an improvement on the conventional MPPT algorithm.
In addition, the proposed hybrid method was compared with different hybrid MPPT controllers including the improved artificial bee colony (I-ABC) algorithm [
23] and the improved cuckoo search (I-CS) algorithm [
24]. The comparison between the proposed hybrid MPPT and existing hybrid MPPTs [
23,
24] is shown in the
Table 8. The partial shading conditions that were tested in [
23,
24] were one peak, two peaks, three peaks, and four peaks of P-V curve peaks, yet they used different PV specifications and different exact irradiances. Their results are compared with the proposed hybrid MPPT in
Table 8. The proposed method is better than the I-ABC and I-CS MPPT methods [
23,
24] in all cases.
Based on the PVMA in
Table 7, the performance was compared in terms of the time response when using different MPPT methods under five different shades for tracking the maximum power point. The results show that the method proposed in this paper indeed provided a better tracking speed response. Therefore, it was verified that the Δ
ρ and Δ
x adjustment values selected from the slope range for the P-V characteristic curve in
Table 1 and
Table 2 led to performance of the MPPT response.
For each of the test cases, although the shading conditions for the selected simulation were set at fixed values, they could be seen as the change in equivalent shading ratio since all the shading conditions of the different test cases differed from each other. Furthermore, it can be observed from the simulation results that the proposed MPPT method could obtain better tracking performance under all the changes in shading conditions. Therefore, the five different test conditions listed in
Table 5 could be treated as the tests of changing between different shading conditions.
Since the slow change of actual irradiance seemed unable to reveal the superior performance of the MPPT methods proposed, irradiance levels with greater step changes were adopted in this paper for conducting the test and verifying the tracking response of the proposed methods. Under the condition of slow changes in irradiance, the MPPT methods proposed could also produce the same superior tracking performance, only not significant enough.
In this paper, the PVMA went through MPPT tests under five different shading conditions. From
Figure 4,
Figure 6,
Figure 8,
Figure 10 and
Figure 12, it can be observed that under such different shading conditions, the P-V characteristic curves show different local peak values, and the curve types differ accordingly. Moreover, from the simulation results in
Figure 5,
Figure 7,
Figure 9,
Figure 11 and
Figure 13, it can also be observed that with the proposed MPPT method, at any point in time during the tracking process, the power value tracked produces a minimum difference between all the compared MPPT methods and the global maximum power point (GMPP). Therefore, it can be determined that the integral of squared error (ISE), integral of time-squared error (ITSE), integral of absolute error (IAE) and integral of time-absolute error (ITAE), which are calculated according to references [
27,
28,
29], would be minimum throughout the simulation.
In this paper, the maximum power tracking test was conducted on the PVMA under five different shading conditions, where each shading condition was equivalent to certain changes in temperature and irradiance parameters. Therefore, the test was the same as the robustness test that considers the MPPT of parametric uncertainties [
30,
31]. As indicated by the test results in
Table 7, all the MPPT methods herein produced better tracking response performances compared with other methods, which demonstrates that the MPPT methods proposed did indeed show robustness.
5. Discussion
The proposed improved GA-ACO algorithm combining the ant colony optimization (ACO) and the genetic algorithm (GA) referred to in reference [
25] determine the initial value of the iterative parameters of the ant colony algorithm. To shorten the number of iterations needed to obtain the optimal value, it is necessary to address the issue that the conventional ACO tends to track the local maximum power point (LMPP) when the optimal value is applied to search the global maximum power point (GMPP) if the photovoltaic module arrays (PVMAs) are abnormal. However, the optimization of the GA-ACO parameters differs depending on the P-V characteristic curves generated from different shading conditions. Thus, no principle is to be found for parameter optimization. Provided that it is learned in tests that when the tracking approaches the MPP and as the slope of the P-V characteristic curve declines, the Pheromone evaporation rate
ρ and the Gaussian standard deviation
x increase, and the
ρ and
x parameters are required to be greater when approaching the MPP. In contrast, the farther the MPP is, the
ρ and
x must be decreased as the slope of the P-V characteristic curve increases. Therefore, the optimal adjusted value of the Pheromone evaporation rate, Δ
ρ, and the optimal adjusted value of Gaussian standard deviation, Δ
x, may be obtained via multiple simulations based on the slope values of the P-V characteristic curves of PVMAs, as indicated in
Table 1 and
Table 2. Comparing the responses of the time tracking to MPP with different MPPT approaches for the PVMA in
Table 7,
Section 4, under five different shading levels for their performances, it is observed that the improved GA-ACO algorithm proposed in this paper indeed has better tracking speed response. When five different peak values are found in the P-V characteristic curve in
Table 7, the proposed improved GA-ACO algorithm has 19.5~35.9% (average 29.2%) fewer iterations when tracking than the GA-ACO algorithm mentioned in [
25]. Compared with the ACO algorithm [
15], it has 74.9~79.7% (average 78.2%) fewer, and 75.0~92.5% (average 81.0%) fewer than the conventional P&O method [
3].






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}