

Door-Opening Technologies: Search for Affordable Assistive Technology

Abstract
:1. Introduction
2. Door-Opening Technologies
2.1. Doorknob Accessories
2.2. Wheelchair-Mounted Door-Opening Accessories
2.3. Door-Opening Robots
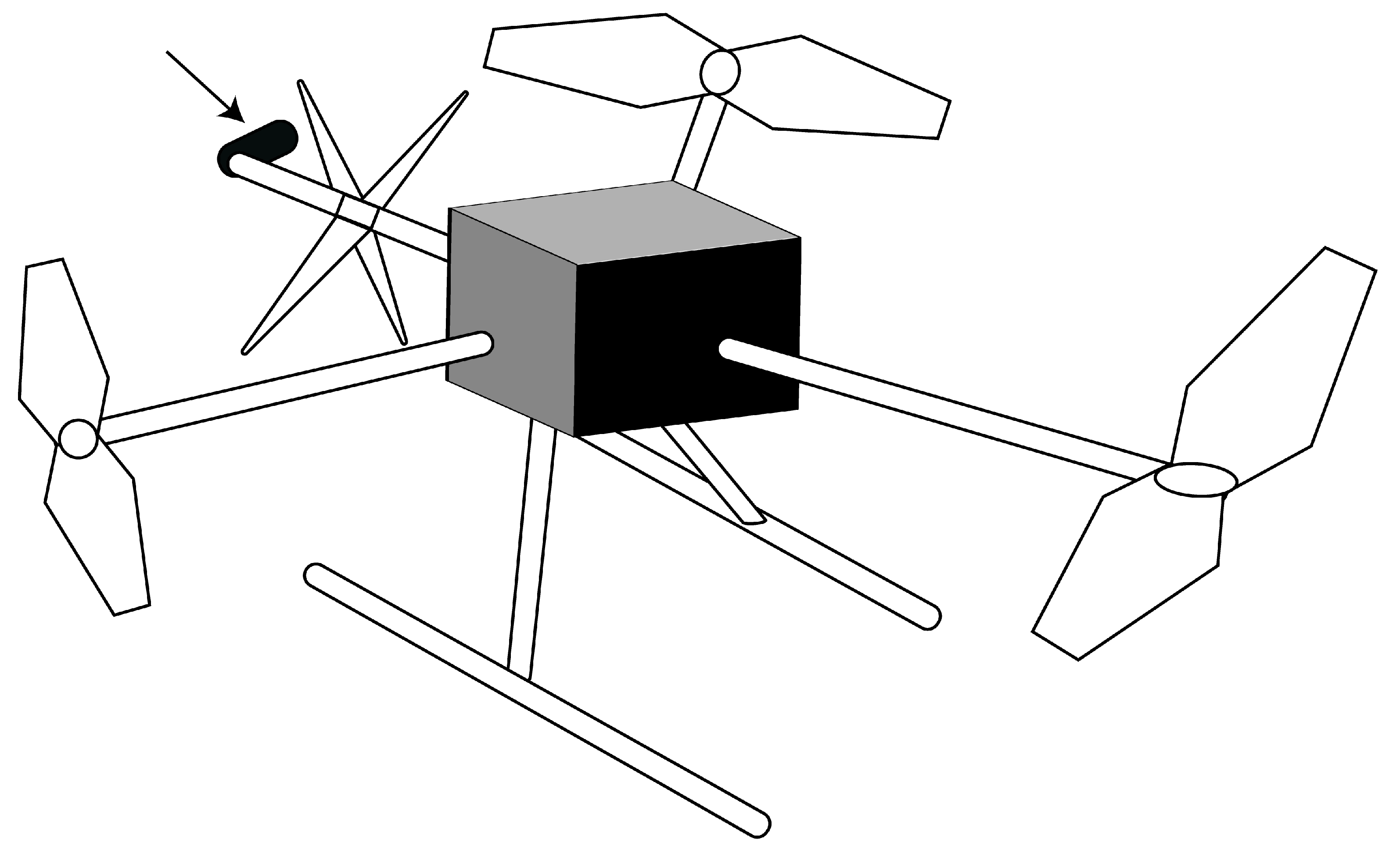
2.4. Door-Opening Drones
3. Discussion
4. Conclusions
5. Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organisation. Disability. Available online: https://www.who.int/news-room/fact-sheets/detail/disability-and-health (accessed on 7 June 2023).
- United Nations. Factsheet on Persons with Disabilities. Available online: https://www.un.org/development/desa/disabilities/resources/factsheet-on-persons-with-disabilities.html (accessed on 7 October 2023).
- International Labour Organization. Disability and Work. Available online: https://www.ilo.org/global/topics/disability-and-work/lang--en/index.htm (accessed on 8 August 2023).
- World Health Organization. Guidelines on the Provision of Manual Wheelchairs in Less Resourced Settings; World Health Organization: Geneva, Switzerland, 2008; ISBN 978-92-4-154748-2. [Google Scholar]
- World Health Organisation. Wheelchair Service Training Package—Basic Level; World Health Organization: Geneva, Switzerland, 2012; ISBN 978-92-4-150347-1. [Google Scholar]
- Gentleman Door Home. Available online: https://www.gentlemandoorautomation.com/ (accessed on 22 November 2023).
- Open Sesame Handicap Automatic Door Openers. Available online: http://www.discovermymobility.com/facebook/ (accessed on 22 November 2023).
- Senior Safety Equipment Adaptive Door Knob Grips For Arthritis. Available online: https://www.seniorsafetyequipment.com/adaptive-door-knob-grips-for-arthritis/ (accessed on 17 November 2023).
- Able Life Solutions EZ Door Knob Grips. Available online: https://ablelifesolutions.com/product/ez-doorknob-grips/ (accessed on 17 November 2023).
- U.S. Department of Justice. 2010 ADA Standards for Accessible Design. Available online: https://www.ada.gov/law-and-regs/design-standards/2010-stds/ (accessed on 22 August 2023).
- Remap 2010 Universal Extended Door Handles. Available online: https://remap.org.uk/solutions/universal-extended-door-handles/ (accessed on 17 November 2023).
- Mobility-Aids. Long Reach Door Opener: Helps Wheelchair Users Reach and Open Locked Doors. Available online: https://www.mobility-aids.com/long-reach-door-opener.html (accessed on 4 August 2023).
- Independent Living. Aids Doorknob Extender (2Pk). Available online: https://independentliving.com/doorknob-extender-2pk/ (accessed on 20 October 2023).
- Kim, D.-J.; Wang, Z.; Paperno, N.; Behal, A. System Design and Implementation of UCF-MANUS—An Intelligent Assistive Robotic Manipulator. IEEE/ASME Trans. Mechatron. 2014, 19, 225–237. [Google Scholar] [CrossRef]
- Evan Ackerman Jaco Is a Low-Power Robot Arm That Hooks to Your Wheelchair—IEEE Spectrum. Available online: https://spectrum.ieee.org/robot-arm-helps-disabled-11-year-old-girl-show-horse-in-competition (accessed on 22 August 2023).
- Alqasemi, R.M.; McCaffrey, E.J.; Edwards, K.D.; Dubey, R.V. Analysis, Evaluation and Development of Wheelchair-Mounted Robotic Arms; IEEE: Piscataway, NJ, USA, 2005; pp. 469–472. [Google Scholar]
- Bengtson, S.H.; Bak, T.; Andreasen Struijk, L.N.; Moeslund, T.B. A Review of Computer Vision for Semi-Autonomous Control of Assistive Robotic Manipulators (ARMs). Disabil. Rehabil. Assist. Technol. 2020, 15, 731–745. [Google Scholar] [CrossRef]
- Chi, M.; Liu, Y.; Yao, Y.; Liu, Y.; Li, S.; Zeng, C.; Zhong, M. Development and Evaluation of Demonstration Information Recording Approach for Wheelchair Mounted Robotic Arm. Complex Intell. Syst. 2022, 8, 2843–2857. [Google Scholar] [CrossRef]
- Exact Dynamics Exact Dynamics. Available online: http://www.exactdynamics.nl/site/ (accessed on 23 October 2023).
- Kinova Inc. Robotic Arm. Available online: https://assistive.kinovarobotics.com/product/jaco-robotic-arm (accessed on 22 August 2023).
- Petrich, L.; Jin, J.; Dehghan, M.; Jagersand, M. Assistive Arm and Hand Manipulation: How Does Current Research Intersect with Actual Healthcare Needs? arXiv 2021, arXiv:2101.02750. [Google Scholar] [CrossRef]
- Simpson, R.C. Smart Wheelchairs: A Literature Review. J. Rehabil. Res. Dev. 2005, 42, 423. [Google Scholar] [CrossRef]
- Kyle Wiggers Intel Details Robotic Assistive Arm for Wheelchair Users. Available online: https://venturebeat.com/ai/intel-details-robotic-assistive-arm-for-wheelchair-users/ (accessed on 22 August 2023).
- Ehrlich, M.; Zaidel, Y.; Weiss, P.L.; Melamed Yekel, A.; Gefen, N.; Supic, L.; Ezra Tsur, E. Adaptive Control of a Wheelchair Mounted Robotic Arm with Neuromorphically Integrated Velocity Readings and Online-Learning. Front. Neurosci. 2022, 16, 1007736. [Google Scholar] [CrossRef]
- Abdullah, S.J.; Shaikh Mohammed, J. Low-Cost Low-Tech Obstacle Pushing/Gliding Wheelchair Accessory. Disabil. Rehabil. Assist. Technol. 2018, 14, 849–858. [Google Scholar] [CrossRef]
- Abdullah, S.J.; Shaikh Mohammed, J. Modeling and Simulation of Two Wheelchair Accessories for Pushing Doors. Assist. Technol. 2018, 30, 165–175. [Google Scholar] [CrossRef]
- Abdullah, S.J.; Mohammed, J. 3D-Printed Design Iteration of a Low-Tech Positive Obstacle Pushing/Gliding Wheelchair Accessory. Disabil. Rehabil. Assist. Technol. 2023. [Google Scholar] [CrossRef] [PubMed]
- Graf, B.; Reiser, U.; Hägele, M.; Mauz, K.; Klein, P. Robotic Home Assistant Care-o-Bot® 3-Product Vision and Innovation Platform; IEEE: Piscataway, NJ, USA, 2009; pp. 139–144. [Google Scholar]
- Bohren, J.; Rusu, R.B.; Jones, E.G.; Marder-Eppstein, E.; Pantofaru, C.; Wise, M.; Mösenlechner, L.; Meeussen, W.; Holzer, S. Towards Autonomous Robotic Butlers: Lessons Learned with the PR2; IEEE: Piscataway, NJ, USA, 2011; pp. 5568–5575. [Google Scholar]
- Srinivasa, S.S.; Berenson, D.; Cakmak, M.; Collet, A.; Dogar, M.R.; Dragan, A.D.; Knepper, R.A.; Niemueller, T.; Strabala, K.; Weghe, M.V. Herb 2.0: Lessons Learned from Developing a Mobile Manipulator for the Home. Proc. IEEE 2012, 100, 2410–2428. [Google Scholar] [CrossRef]
- Arduengo, M.; Torras, C.; Sentis, L. Robust and Adaptive Door Operation with a Mobile Robot. Intell. Serv. Robot. 2021, 14, 409–425. [Google Scholar] [CrossRef]
- Christoforou, E.G.; Panayides, A.S.; Avgousti, S.; Masouras, P.; Pattichis, C.S. An Overview of Assistive Robotics and Technologies for Elderly Care; Springer: Berlin/Heidelberg, Germany, 2020; pp. 971–976. [Google Scholar]
- Ma, X.; Wang, C. Autonomous Control of Mobile Robots for Opening Doors Based on Multi-Sensor Fusion; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1–8. [Google Scholar]
- Su, H.-R.; Chen, K.-Y. Design and Implementation of a Mobile Robot with Autonomous Door Opening Ability. Int. J. Fuzzy Syst. 2019, 21, 333–342. [Google Scholar] [CrossRef]
- Hans, M.; Graf, B.; Schraft, R. Robotic Home Assistant Care-o-Bot: Past-Present-Future; IEEE: Piscataway, NJ, USA, 2002; pp. 380–385. [Google Scholar]
- Srinivasa, S.S.; Ferguson, D.; Helfrich, C.J.; Berenson, D.; Collet, A.; Diankov, R.; Gallagher, G.; Hollinger, G.; Kuffner, J.; Weghe, M.V. HERB: A Home Exploring Robotic Butler. Auton. Robot. 2010, 28, 5–20. [Google Scholar] [CrossRef]
- Cha, E.; Dragan, A.D.; Srinivasa, S.S. Effects of Robot Capability on User Acceptance; IEEE: Piscataway, NJ, USA, 2013; pp. 97–98. [Google Scholar]
- Prieto, S.A.; Adán, A.; Vázquez, A.S.; Quintana, B. Passing through Open/Closed Doors: A Solution for 3D Scanning Robots. Sensors 2019, 19, 4740. [Google Scholar] [CrossRef]
- Savarese, F.; Quer, S.; Tatsuya, H. Detecting, Opening and Navigating through Doors: A Unified Framework for Human Service Robots. In ICSOFT 2019; SCITEPRESS: Setúbal, Portugal, 2019; pp. 416–427. ISBN 989-758-379-3. [Google Scholar]
- Matthew Sparkes Robot Learns to Open Doors by Splitting the Task into Three Easy Steps | New Scientist. Available online: https://www.newscientist.com/article/2315030-robot-learns-to-open-doors-by-splitting-the-task-into-three-easy-steps/ (accessed on 4 August 2023).
- Ito, H.; Yamamoto, K.; Mori, H.; Ogata, T. Efficient Multitask Learning with an Embodied Predictive Model for Door Opening and Entry with Whole-Body Control. Sci. Robot. 2022, 7, eaax8177. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, L.; Ma, O. Force-Vision Sensor Fusion Improves Learning-Based Approach for Self-Closing Door Pulling. IEEE Access 2021, 9, 137188–137197. [Google Scholar] [CrossRef]
- Sun, E. An Autonomous Robot for Self-Closing Door Opening. Available online: https://www.youtube.com/watch?v=O_FV47hIRus (accessed on 4 August 2023).
- Guardian News. Human v Robot Dog: Boston Dynamics Takes on Its Door-Opening SpotMini. Available online: https://www.youtube.com/watch?v=W1LWMk7JB80 (accessed on 4 August 2023).
- Chen, Z.-J.; Gao, F.; Pan, Y. Novel Door-Opening Method for Six-Legged Robots Based on Only Force Sensing. Chin. J. Mech. Eng. 2017, 30, 1227–1238. [Google Scholar] [CrossRef]
- MECAI Care-O-Bot 4. Available online: https://mecai.org/careobot.html (accessed on 23 October 2023).
- CNET. This One-Armed Robot Won’t Cost an Arm and a Leg. Available online: https://www.cnet.com/science/this-one-armed-robot-wont-cost-an-arm-and-a-leg/ (accessed on 23 October 2023).
- Evan Ackerman Boston Dynamics’ Spot Robot Dog Now Available for $74,500—IEEE Spectrum. Available online: https://spectrum.ieee.org/boston-dynamics-spot-robot-dog-now-available (accessed on 7 June 2023).
- The Stack How Much Does Boston Dynamics’ Spot Cost? This Contract Reveals. Available online: https://www.thestack.technology/how-much-does-boston-dynamics-spot-cost-uk/ (accessed on 21 October 2023).
- Choi, H.-W.; Kim, H.-J.; Kim, S.-K.; Na, W.S. An Overview of Drone Applications in the Construction Industry. Drones 2023, 7, 515. [Google Scholar] [CrossRef]
- Daud, S.M.S.M.; Yusof, M.Y.P.M.; Heo, C.C.; Khoo, L.S.; Singh, M.K.C.; Mahmood, M.S.; Nawawi, H. Applications of Drone in Disaster Management: A Scoping Review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research Avenues for Drone-Based Models in Logistics: A Classification and Review. Expert Syst. Appl. 2021, 177, 114854. [Google Scholar] [CrossRef]
- Rosser Jr, J.C.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and Medical Applications of Drones: A Comprehensive Review. JSLS J. Soc. Laparoendosc. Surg. 2018, 22, e2018.00018. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- JEREMY HSU Tiny Drones Team Up to Open Doors—IEEE Spectrum. Available online: https://spectrum.ieee.org/tiny-drones-team-up-to-open-doors (accessed on 4 August 2023).
- National Safety Council Drones—National Safety Council. Available online: https://www.nsc.org/workplace/safety-topics/work-to-zero/safety-technologies/drones (accessed on 4 August 2023).
- Sigari, C.; Biberthaler, P. Medical Drones: Disruptive Technology Makes the Future Happen. Der Unfallchirurg 2021, 124, 974. [Google Scholar] [CrossRef] [PubMed]
- BRINC LEMUR 2. Available online: https://brincdrones.com/lemur-2/ (accessed on 10 October 2023).
- Mechanical Engineering—Purdue University Boomcopter Is a Drone That Can Open Doors. Available online: https://engineering.purdue.edu/ME/News/boomcopter-is-a-drone-that-can-open-doors (accessed on 4 August 2023).
- Mechanical Engineering—Purdue University Boomcopter: The Drone That Can Open Doors. Available online: https://www.youtube.com/watch?v=3Q1dXuMWzTw (accessed on 4 August 2023).
- McArthur, D.R.; An, Z.; Cappelleri, D.J. Pose-Estimate-Based Target Tracking for Human-Guided Remote Sensor Mounting with a UAV; IEEE: Piscataway, NJ, USA, 2020; pp. 10636–10642. [Google Scholar]
- Lee, D.; Seo, H.; Jang, I.; Lee, S.J.; Kim, H.J. Aerial Manipulator Pushing a Movable Structure Using a DOB-Based Robust Controller. IEEE Robot. Autom. Lett. 2020, 6, 723–730. [Google Scholar] [CrossRef]
- Brunner, M.; Rizzi, G.; Studiger, M.; Siegwart, R.; Tognon, M. A Planning-and-Control Framework for Aerial Manipulation of Articulated Objects. IEEE Robot. Autom. Lett. 2022, 7, 10689–10696. [Google Scholar] [CrossRef]
- Cuniato, E.; Geles, I.; Zhang, W.; Andersson, O.; Tognon, M.; Siegwart, R. Learning to Open Doors with an Aerial Manipulator. arXiv 2023, arXiv:2307.15581. [Google Scholar]
- The Verge Micro-Drones with Winches Can Open Doors and Lift 40 Times Their Own Weight. Available online: https://www.theverge.com/2018/10/24/18018984/micro-drones-winches-lift-40-times-own-weight-stanford-epfl (accessed on 4 August 2023).
- IEEE Spectrum “FlyCroTug” Drones Work Together to Open a Door. Available online: https://www.youtube.com/watch?v=GhrpWggIbSM (accessed on 4 August 2023).
- Estrada, M.A.; Mintchev, S.; Christensen, D.L.; Cutkosky, M.R.; Floreano, D. Forceful Manipulation with Micro Air Vehicles. Sci. Robot. 2018, 3, eaau6903. [Google Scholar] [CrossRef]
- Davis, B. BRINC Aims Lemur 2 and BRINC Ball at Police, SWAT. Available online: https://insideunmannedsystems.com/brinc-aims-lemur-2-and-brinc-ball-at-police-swat/ (accessed on 21 October 2023).
- Edwards, K.; Alqasemi, R.; Dubey, R. Wheelchair-Mounted Robotic Arms: Design and Development; IEEE: Piscataway, NJ, USA, 2006; pp. 613–618. [Google Scholar]
- Robert Garbett Using Drones to Keep Workers Safe|British Safety Council. Available online: https://www.britsafe.org/publications/safety-management-magazine/safety-management-magazine/2021/flying-away-from-risks/ (accessed on 4 August 2023).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Door Opening AT | Features/Specifications | Commercial Availability | Cost |
|---|---|---|---|
| Non-slip doorknob grips | Attach to doorknob; Improve doorknob gripping and turning; Materials: Silicone or rubber; Dimensions: 2–3″ L × 1.6–2″ D | Yes | <USD 50 |
| Doorknob extenders | Attach to doorknob; Reduce doorknob turning effort; Materials: Rubber or plastic; Dimensions: 4.25–7″ L × 2″ W | Yes | <USD 50 |
| Long-reach doorknob turners | Aid reach to doorknobs; Materials: Aluminum and rubber; Dimensions 23.5″ L × 2.25″ W | Yes | <USD 50 |
| Door Opening AT | Features/Specifications | Commercial Availability | Cost |
|---|---|---|---|
| Wheelchair-mounted robotic arm | Attached to wheelchair; Allows turning of doorknobs and pulling or pushing of door; Weight: ~5–9 kg (JACO–iARM); Payload: ~1.5 kg; Power consumption: ~25 Watts; Maximum reach: ~3 ft Degrees of freedom (DOF): 6 | Yes | USD 20k–35k |
| Wheelchair-mounted arc-shaped accessory | Attached to wheelchair; Only allows pushing of door; Weight: ~2.15 kg; Dimensions: 42″ L × 26.3″ W | No | <USD 100 |
| Specification | Care-O-Bot | PR2 | UBR-1 | HERB 2.0 | SpotMini |
|---|---|---|---|---|---|
| Weight (kg) | 140 | 226.8 | 73 | 127 | 31.7–32.7 |
| Dimensions (L/W/H) (″) | 28.3/28.3/62.2 | 26.3/26.3/65 | 19.5/19.5/38–52 | 24.4/25.8/55 | 43.3/19.7/24 |
| Payload (kg) | 5 | 1.8 | 1.5 | - | 5 |
| Maximum reach (″) | 35.4 | - | 29.75 | - | 70.9 |
| Degrees of freedom (DOF) | 7 (arm) 29 (overall) | 7 (arm) 20 (overall) | 7 (arm) 13 (overall) | 7 (arm) 27 (overall) | 7 (arm) 12 (overall) |
| Sensors | Camera; laser scanners; time-of-flight sensor | Camera; tilting laser range finder; fingertip pressure sensors | Laser scanner; tilting 3D depth sensor; telescopic spine | Cameras; spinning 3D laser; laser range finders; fingers (position, strain, tactile sensors); Segway base | Cameras; 3D depth sensors; time-of-flight sensor |
| Door Opening AT | Features | Commercial Availability | Cost |
|---|---|---|---|
| Door opening robots | Wheeled; Allows turning of doorknobs and pulling or pushing of door | Yes | USD 35k–500k |
| Four-legged robots | Legged; Allows turning of doorknobs and pulling or pushing of door | Yes | USD 75k–200k+ |
| Specification | Lemur-2 | BoomCopter | FlyCroTug |
|---|---|---|---|
| Weight (kg) | 1.5 | 2.3–2.9 | 0.1 |
| Dimensions (L/W/H) (″) | 13/16/4 | 23.6/27.6/11.4 | 4/4/- |
| Propeller design | Quadcopter | Tricopter with a horizontally mounted reversible propeller | Quadcopter |
| Payload (kg) | 0.45 | 1.86–1.2 | 0.02 (flight) ~4 (tugging) |
| Flight time (min) | 20 | 13–21.4 | 5 |
| Flight range (km) | - | 8.8–14.4 | - |
| Sensors | Forward and downward LiDAR (Light Detection and Ranging) sensor; dual tracking cameras (daytime, night vision, thermal) | GPS module; force sensor; sonar sensor; camera; flight management unit (FMU) | Autopilot module (inertial measurement unit, barometer) |
| Door opening AT | Features | Commercial Availability | Cost |
|---|---|---|---|
| Single drone | Attachment breaks glass; Drone can push doors already ajar | Yes | USD 10k–20k |
| Single drone | Attachment turns doorknobs and pulls or pushes door | No | – |
| Swarm of tiny drones | One drone turns doorknob; Another drone pulls the door | No | – |
| Door Opening AT | Average Cost | Accessibility | Acceptability |
|---|---|---|---|
| Doorknob accessories | + * | + | + |
| Wheelchair-mounted door-opening accessories | +++ | ++++ | ++++ |
| Door-opening robots | ++++ ** | ++ | ++ |
| Door-opening drones | ++ | +++ | +++ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaikh-Mohammed, J.; Alharbi, Y.; Alqahtani, A. Door-Opening Technologies: Search for Affordable Assistive Technology. Technologies 2023, 11, 177. https://doi.org/10.3390/technologies11060177
Shaikh-Mohammed J, Alharbi Y, Alqahtani A. Door-Opening Technologies: Search for Affordable Assistive Technology. Technologies. 2023; 11(6):177. https://doi.org/10.3390/technologies11060177
Chicago/Turabian StyleShaikh-Mohammed, Javeed, Yousef Alharbi, and Abdulrahman Alqahtani. 2023. "Door-Opening Technologies: Search for Affordable Assistive Technology" Technologies 11, no. 6: 177. https://doi.org/10.3390/technologies11060177