
Fault Detection of Wheelset Bearings through Vibration-Sound Fusion Data Based on Grey Wolf Optimizer and Support Vector Machine

Abstract
:1. Introduction
2. Methodology
2.1. Overview of the Proposed Method
2.2. The Description of the GWO-SVM Model
- Select the current candidate i: Choose the i-th wolf from the pack.
- Train SVM model using current candidate: (1) Extract the SVM hyperparameters and from the current candidate; (2) Initialize an SVM model with these parameters; (3) Train the SVM model on the training dataset.
- Evaluate the model on the validation set: (1) Use the validation dataset to predict outcomes; (2) Calculate the accuracy of the predictions, which represents the fitness of the current candidate
- Record the fitness value of the current candidate: Save the fitness value for the current candidate.
- Increment the index i: Move to the next candidate ().
- Repeat Step 3: Continue evaluating the next candidate until all candidates are evaluated.
2.2.1. Basic SVM Formula
2.2.2. GWO Formulas
- -
- D represents the distance between the current wolf and the , , and .
- -
- is the position of the , , and , representing the best solution found so far.
- -
- is the updated position of the wolf, the elements in are essentially combinations of SVM hyperparameters, optimized through the GWO process to find the best parameter settings.
2.2.3. GWO Algorithm Steps
- -
- w is the weight vector that determines the hyperplane for classification.
- -
- b is the bias term.
- -
- is the square norm of the weight vector used to control the complexity of the model.
- -
- is a regularization parameter used to balance the misclassification of training data and model complexity.
- -
- is a slack variable that allows certain samples to be misclassified.
- Initialize the positions of the wolves, for linear kernel, train the SVM with the linear kernel using the wolf’s position parameter ; train the SVM with the RBF kernel using the wolf’s position parameters , , and train the SVM with the Polynomial kernel using the wolf’s position parameters and coefficient term , the degree of polynomial Kernel in this study is confirmed.
- Evaluate the fitness of each wolf based on the classification accuracy of the SVM.
- Update the positions of , , and .
- Update the positions of the other wolves.
- Repeat the above steps until the maximum number of iterations is reached.
2.2.4. Summary
- -
- determines the balance between minimizing the error on the training data and reducing the complexity of the model. A larger value tries to classify every sample correctly, which may lead to overfitting, while a smaller value allows some misclassifications, potentially improving generalization.
- -
- controls the width of the Gaussian kernel. A larger value means higher sensitivity to individual data points, making the model focus more on local patterns, while a smaller value makes the model consider a broader range of data points.
- -
- r adjusts the influence of higher-order terms in the polynomial kernel.
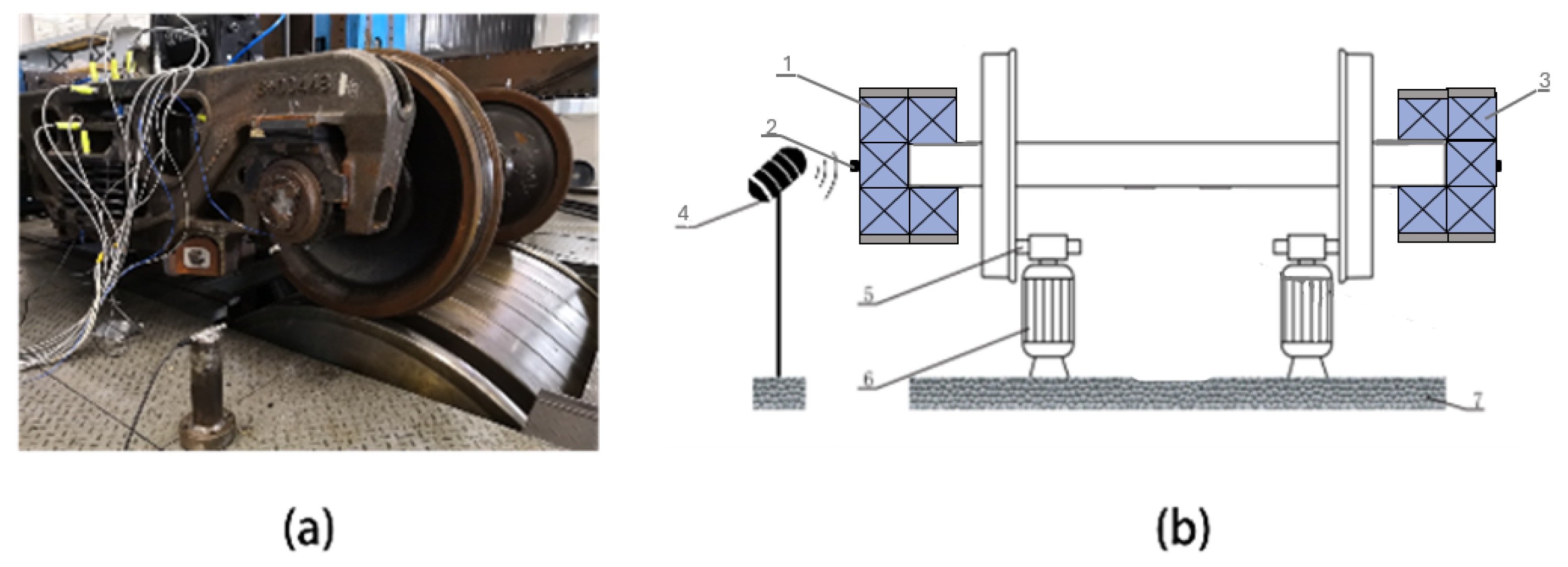
3. Experimental Section
3.1. Experimental Setup and Dataset
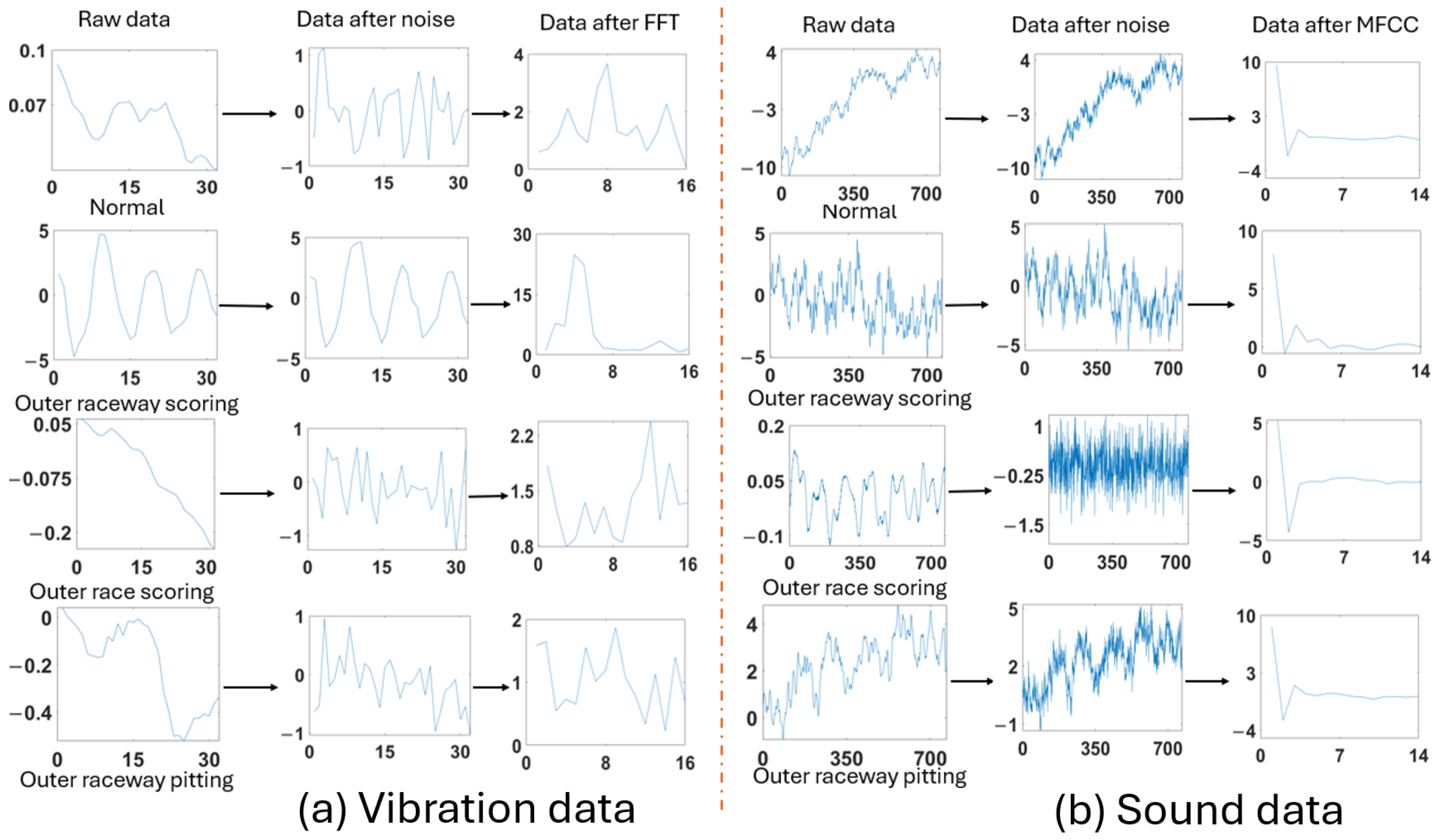
3.2. Data Analysis
3.3. Experimental Results
3.3.1. Comparison Performance
3.3.2. Training Loss
4. Discussion
4.1. Evaluation of Different Lengths in Each Segment
4.2. Evaluation of Proposed Method Performance
4.3. Evaluation of Testing Speed
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yadav, O.P.; Pahuja, G.L. Bearing health assessment using time domain analysis of vibration signal. Int. J. Image Graph. Signal Process. 2020, 10, 27. [Google Scholar] [CrossRef]
- NCD.IO. Bearing Fault Detection Vibration Analysis-How to Measure Vibration Frequency Domain Predictive Analysis. Available online: https://ncd.io/blog/bearing-fault-detection-vibration-analysis/ (accessed on 23 June 2023).
- Altaf, M.; Akram, T.; Khan, M.A.; Iqbal, M.; Ch, M.M.I.; Hsu, C.H. A new statistical features based approach for bearing fault diagnosis using vibration signals. Sensors 2022, 22, 2012. [Google Scholar] [CrossRef]
- Kumar, J.P.; Chauhan, P.S.; Pandit, P.P. Time domain vibration analysis techniques for condition monitoring of rolling element bearing: A review. Mater. Today Proc. 2022, 62, 6336–6340. [Google Scholar] [CrossRef]
- Wang, T.; Qin, R.; Meng, H.; Li, M.; Cheng, M.; Liu, Y. Frequency Domain Feature Extraction and Long Short-Term Memory for Rolling Bearing Fault Diagnosis. In Proceedings of the 2022 International Conference on Machine Learning, Control, and Robotics (MLCR), Suzhou, China, 29–31 October 2022. [Google Scholar]
- Chen, B.; Gu, F.; Zhang, W.; Song, D.; Cheng, Y.; Zhou, Z. Power function-based Gini indices: New sparsity measures using power function-based quasi-arithmetic means for bearing condition monitoring. Struct. Health Monit. 2022, 22, 3677–3706. [Google Scholar] [CrossRef]
- Huang, P.; Pan, Z.; Qi, X.; Lei, J. Bearing fault diagnosis based on EMD and PSD. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 1300–1304. [Google Scholar]
- Chen, B.; Zhang, W.; Song, D.; Cheng, Y.; Gu, F.; Ball, A.D. Squared envelope sparsification via blind deconvolution and its application to railway axle bearing diagnostics. Struct. Health Monit. 2023, 22, 3637–3658. [Google Scholar] [CrossRef]
- Baba, T. Time-frequency analysis using short time Fourier transform. Open Acoust. J. 2012, 5, 32–38. [Google Scholar] [CrossRef]
- Zhang, D. Wavelet transform. In Fundamentals of Image Data Mining: Analysis, Features, Classification and Retrieval; Springer: Cham, Switerland, 2019; pp. 35–44. [Google Scholar]
- Yu, G. A concentrated time–frequency analysis tool for bearing fault diagnosis. IEEE Trans. Instrum. Meas. 2019, 69, 371–381. [Google Scholar] [CrossRef]
- Zhang, Q.; Yang, J.; An, Q. Noise calculation method for deep groove ball bearing with considering raceway surface waviness and roller size error. Front. Mech. Eng. 2018, 4, 13. [Google Scholar] [CrossRef]
- BearingNews. Diagnosing Bearing Failures Using Ultrasound Spectrum Analysis. 2022. Available online: https://www.bearing-news.com/diagnosing-bearing-failures-using-ultrasound-spectrum-analysis/ (accessed on 26 April 2022).
- Heckbert, P. Fourier transforms and the fast Fourier transform (FFT) algorithm. Comput. Graph. 1995, 2, 15–463. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Hiremath, N.; Reddy, D.M. Bearing fault detection using acoustic emission signals analyzed by empirical mode decomposition. Int. J. Res. Eng. Technol. 2014, 3, 426–431. [Google Scholar]
- Grebenik, J.; Zhang, Y.; Bingham, C.; Srivastava, S. Roller element bearing acoustic fault detection using smartphone and consumer microphones comparing with vibration techniques. In Proceedings of the 2016 17th International Conference on Mechatronics-Mechatronika (ME), Prague, Czech Republic, 7–9 December 2016; pp. 1–7. [Google Scholar]
- Li, C.; Chen, C.; Gu, X. Acoustic-Based Rolling Bearing Fault Diagnosis Using a Co-Prime Circular Microphone Array. Sensors 2023, 23, 3050. [Google Scholar] [CrossRef]
- Orman, M.; Rzeszucinski, P.; Tkaczyk, A.; Krishnamoorthi, K.; Pinto, C.T.; Sulowicz, M. Bearing fault detection with the use of acoustic signals recorded by a hand-held mobile phone. In Proceedings of the 2015 International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Bangalore, India, 10–12 December 2015; pp. 252–256. [Google Scholar]
- Attal, E.; Asseko, E.O.; Sekko, E.; Sbai, N.; Ravier, P. Study of bearing fault detectability on a rotating machine by vibro-acoustic characterisation as a function of a noisy surrounding machine. In Surveillance, Vibrations, Shock and Noise; Institut Supérieur de l’Aéronautique et de l’Espace: Toulouse, France, 2023. [Google Scholar]
- Mey, O.; Schneider, A.; Enge-Rosenblatt, O.; Mayer, D.; Schmidt, C.; Klein, S.; Herrmann, H.-G. Condition Monitoring of Drive Trains by Data Fusion of Acoustic Emission and Vibration Sensors. Processes 2021, 9, 1108. [Google Scholar] [CrossRef]
- Kaicheng, Y.; Chaosheng, Z. Vibration data fusion algorithm of auxiliaries in power plants based on wireless sensor networks. In Proceedings of the 2011 International Conference on Computer Science and Service System (CSSS), Nanjing, China, 27–29 June 2011; pp. 935–938. [Google Scholar]
- Xuejun, L.; Guangfu, B.; Dhillon, B.S. A new method of multi-sensor vibration signals data fusion based on correlation function. In Proceedings of the 2009 WRI World Congress on Computer Science and Information Engineering, Los Angeles, CA, USA, 31 March–2 April 2009; Voulme 6, pp. 170–174. [Google Scholar]
- Al-Haddad, L.A.; Jaber, A.A.; Hamzah, M.N.; Fayad, M.A. Vibration-current data fusion and gradient boosting classifier for enhanced stator fault diagnosis in three-phase permanent magnet synchronous motors. Electr. Eng. 2024, 106, 3253–3268. [Google Scholar] [CrossRef]
- Wan, H.; Gu, X.; Yang, S.; Fu, Y. A Sound and Vibration Fusion Method for Fault Diagnosis of Rolling Bearings under Speed-Varying Conditions. Sensors 2023, 23, 3130. [Google Scholar] [CrossRef] [PubMed]
- Shi, H.; Li, Y.; Bai, X.; Zhang, K.; Sun, X. A two-stage sound-vibration signal fusion method for weak fault detection in rolling bearing systems. Mech. Syst. Signal Process. 2022, 172, 109012. [Google Scholar] [CrossRef]
- Duan, Z.; Wu, T.; Guo, S.; Shao, T.; Malekian, R.; Li, Z. Development and trend of condition monitoring and fault diagnosis of multi-sensors information fusion for rolling bearings: A review. Int. J. Adv. Manuf. Technol. 2018, 96, 803–819. [Google Scholar] [CrossRef]
- Wang, X.; Mao, D.; Li, X. Bearing fault diagnosis based on vibro-acoustic data fusion and 1D-CNN network. Measurement 2021, 173, 108518. [Google Scholar] [CrossRef]
- Gu, X.; Tian, Y.; Li, C.; Wei, Y.; Li, D. Improved SE-ResNet Acoustic–Vibration Fusion for Rolling Bearing Composite Fault Diagnosis. Appl. Sci. 2024, 14, 2182. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Hearst, M.A.; Dumais, S.T.; Osuna, E.; Scholkopf, B. Support vector machines. IEEE Intell. Syst. Their Appl. 1998, 13, 18–28. [Google Scholar] [CrossRef]
- Yan, X.; Lin, Z.; Lin, Z.; Vucetic, B. A Novel Exploitative and Explorative GWO-SVM Algorithm for Smart Emotion Recognition. IEEE Internet Things J. 2023, 10, 9999–10011. [Google Scholar] [CrossRef]
- Davis, S.; Mermelstein, P. Comparison of parametric representations for monosyllabic word recognition in continuously spoken sentences. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 357–366. [Google Scholar] [CrossRef]
- Pule, M.; Matsebe, O.; Samikannu, R. Application of PCA and SVM in fault detection and diagnosis of bearings with varying speed. Math. Probl. Eng. 2022, 2022, 5266054. [Google Scholar] [CrossRef]
- Yang, K.; Zhao, L.; Wang, C. A new intelligent bearing fault diagnosis model based on triplet network and SVM. Sci. Rep. 2022, 12, 5234. [Google Scholar] [CrossRef] [PubMed]
- Mo, C.; Han, H.; Liu, M.; Zhang, Q.; Yang, T.; Zhang, F. Research on SVM-Based Bearing Fault Diagnosis Modeling and Multiple Swarm Genetic Algorithm Parameter Identification Method. Mathematics 2023, 11, 2864. [Google Scholar] [CrossRef]
- Selvi, M.S.; Rani, S.J. Classification of admission data using classification learner toolbox. J. Phys. Conf. Ser. 2021, 1979, 12043. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviations | Description |
|---|---|
| CNN | Convolutional Neural Network |
| FFT | Fast Fourier Transform |
| GWO | Grey Wolf Optimizer |
| MFCC | Mel-Frequency Cepstral Coefficients |
| PCA | Principal Component Analysis |
| PSD | Power Spectral Density |
| RBF | Radial Basis Function |
| SPL | Sound Pressure Level |
| STFT | Short-Time Fourier Transform |
| SVM | Support Vector Machine |
| Training Group | Testing Group | |
|---|---|---|
| Validation 1 | 2, 3, 4 | 1 |
| Validation 2 | 1, 3, 4 | 2 |
| Validation 3 | 1, 2, 4 | 3 |
| Validation 4 | 1, 2, 3 | 4 |
| SVM Method | Data Types | Length | |||
|---|---|---|---|---|---|
| 256 | 128 | 64 | 32 | ||
| Linear SVM | Vibration | 100% | 98% | 98% | 97% |
| Sound | 99% | 100% | 99% | 97% | |
| Cubic SVM | Vibration | 100% | 100% | 99% | 98% |
| Sound | 99% | 100% | 98% | 97% | |
| Quadratic SVM | Vibration | 100% | 100% | 98% | 98% |
| Sound | 99% | 100% | 98% | 97% | |
| Coarse Guassian SVM | Vibration | 100% | 99% | 99% | 97% |
| Sound | 99% | 100% | 97% | 93% | |
| Medium Gaussian SVM | Vibration | 99% | 99% | 99% | 96% |
| Sound | 99% | 100% | 100% | 98% | |
| Kernel of SVM | Training Model | Vibration Accuracy | Sound Accuracy | Fusion Accuracy |
|---|---|---|---|---|
| Linear SVM | Matlab | 67.6% | 97.4% | 97.8% |
| GWO-SVM | 68% | 97.6% | 98.3% | |
| Quadratic SVM | Matlab | 67.4% | 97.2% | 97.9% |
| GWO-SVM | 67.7% | 97.3% | 98% | |
| Cubic SVM | Matlab | 66.8% | 95.5% | 97.5% |
| GWO-SVM | 66.8% | 97.2% | 97.7% | |
| Gaussian SVM | Matlab-Medium Gaussian SVM | 68% | 97.6% | 97% |
| Matlab-Coarse Gaussian SVM | 67.9% | 95.2% | 94.3% | |
| GWO-SVM | 68.1% | 97.7% | 98.1% |
| Different Kernel of GWO-SVM | Accuracy | Testing Time for Each Segment | Sampling Time |
|---|---|---|---|
| Linear SVM | 98.3% | 0.0027 ms | 31.25 ms |
| Quadratic SVM | 98% | 0.0034 ms | |
| Cubic SVM | 97.7% | 0.0035 ms | |
| Gaussian SVM | 98.1% | 0.016 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Meng, H.; Zhang, F.; Qin, R. Fault Detection of Wheelset Bearings through Vibration-Sound Fusion Data Based on Grey Wolf Optimizer and Support Vector Machine. Technologies 2024, 12, 144. https://doi.org/10.3390/technologies12090144
Wang T, Meng H, Zhang F, Qin R. Fault Detection of Wheelset Bearings through Vibration-Sound Fusion Data Based on Grey Wolf Optimizer and Support Vector Machine. Technologies. 2024; 12(9):144. https://doi.org/10.3390/technologies12090144
Chicago/Turabian StyleWang, Tianhao, Hongying Meng, Fan Zhang, and Rui Qin. 2024. "Fault Detection of Wheelset Bearings through Vibration-Sound Fusion Data Based on Grey Wolf Optimizer and Support Vector Machine" Technologies 12, no. 9: 144. https://doi.org/10.3390/technologies12090144