Tactile Feels in Grasping/Cutting Processes with Scissors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
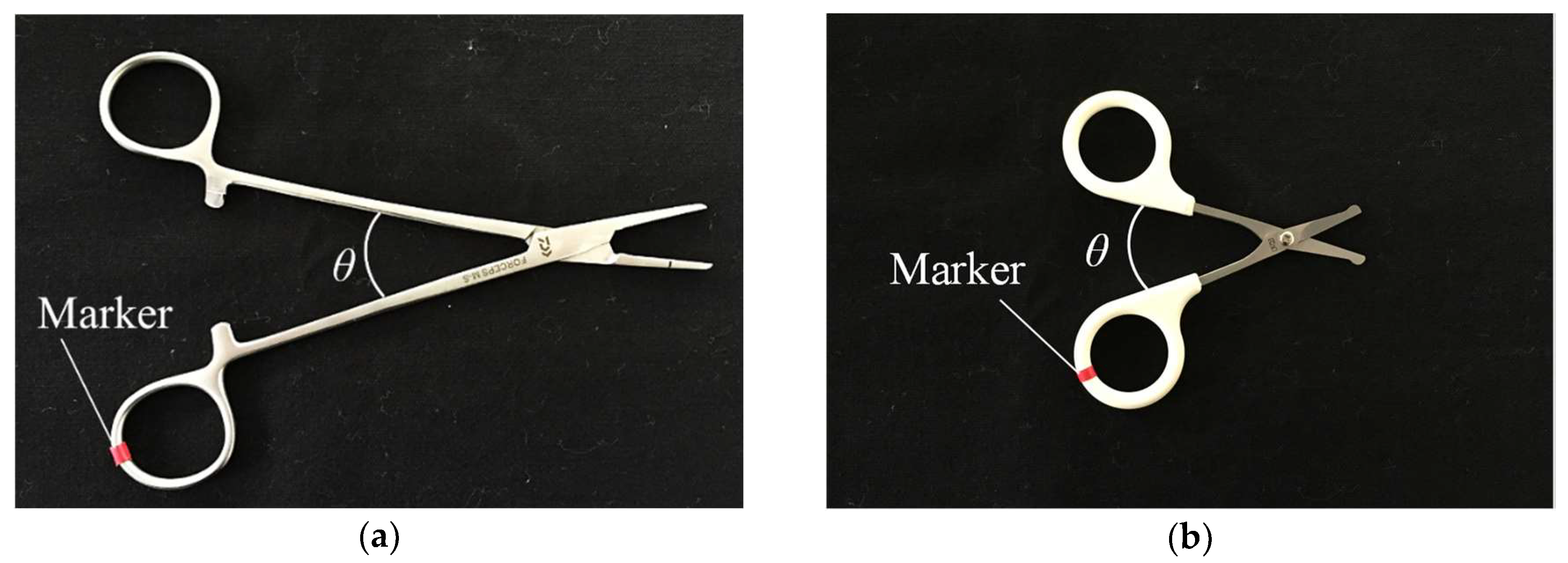
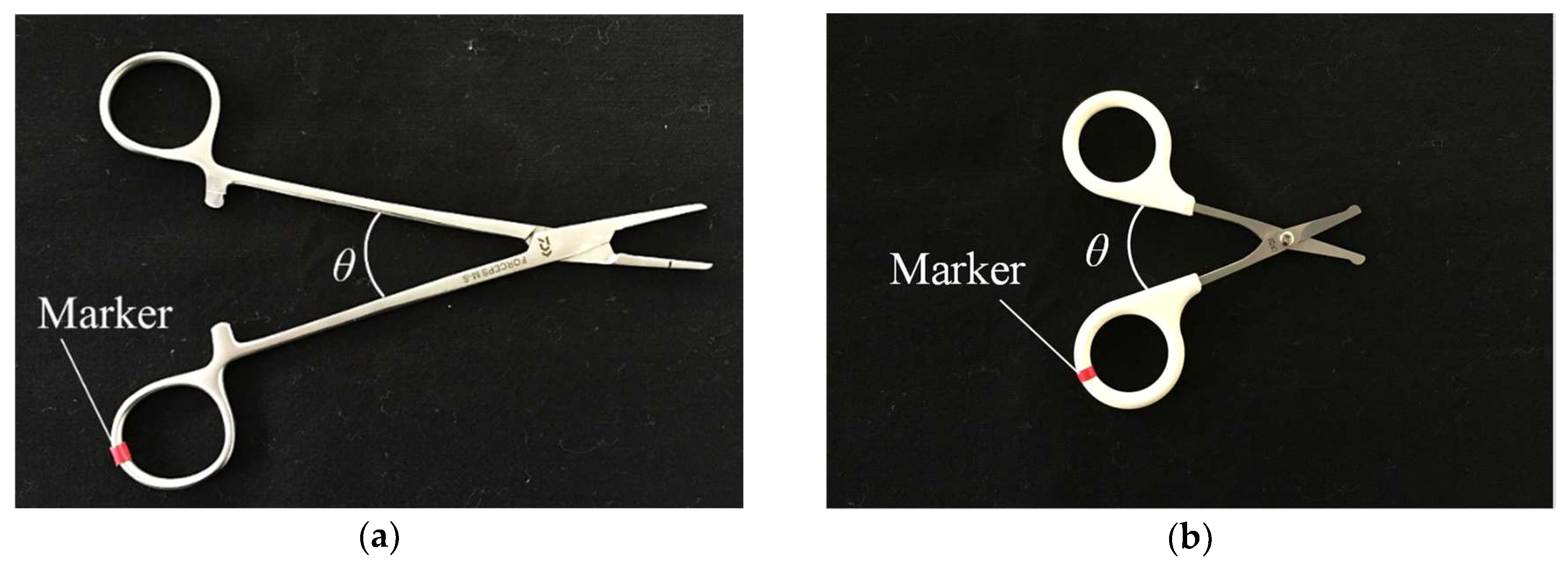
2.1. Scissors and Objects
2.2. Tactile Evaluation Tests
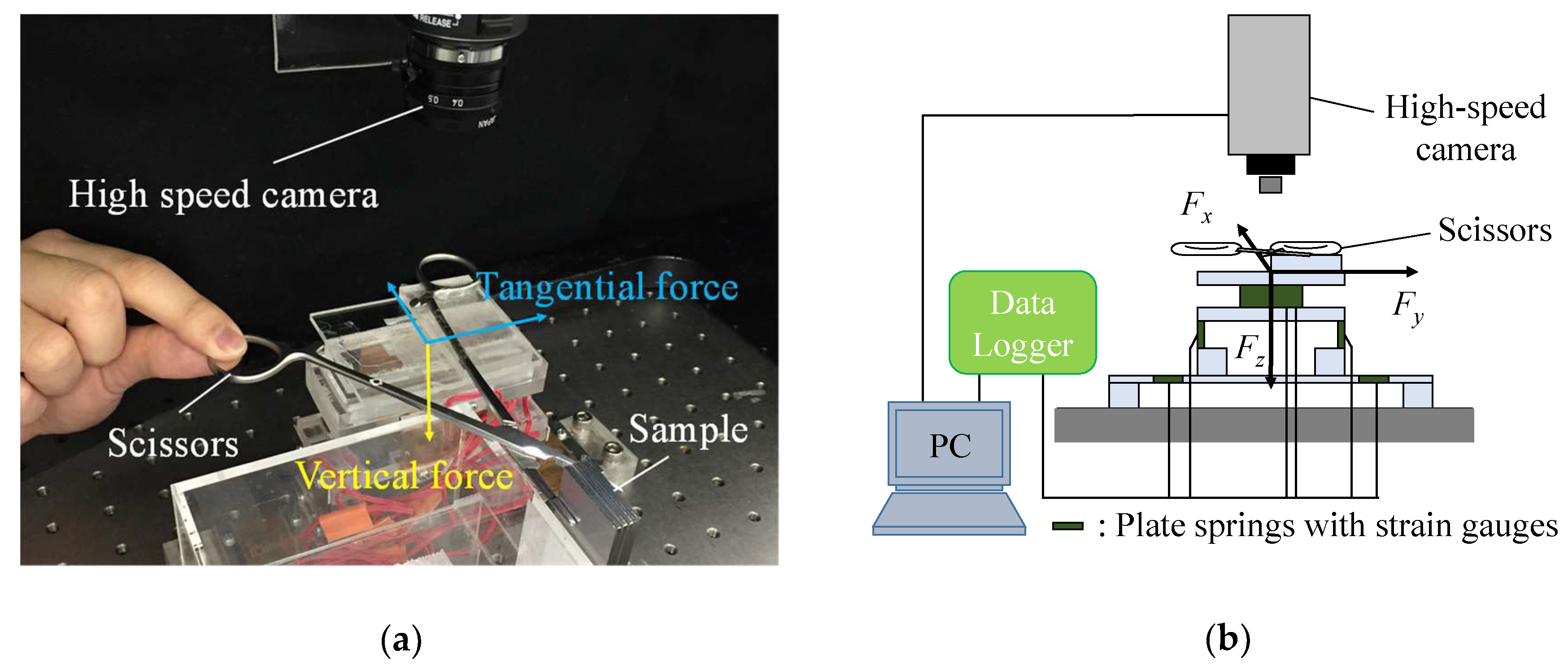
2.3. Mechanical Evaluation Tests
3. Results
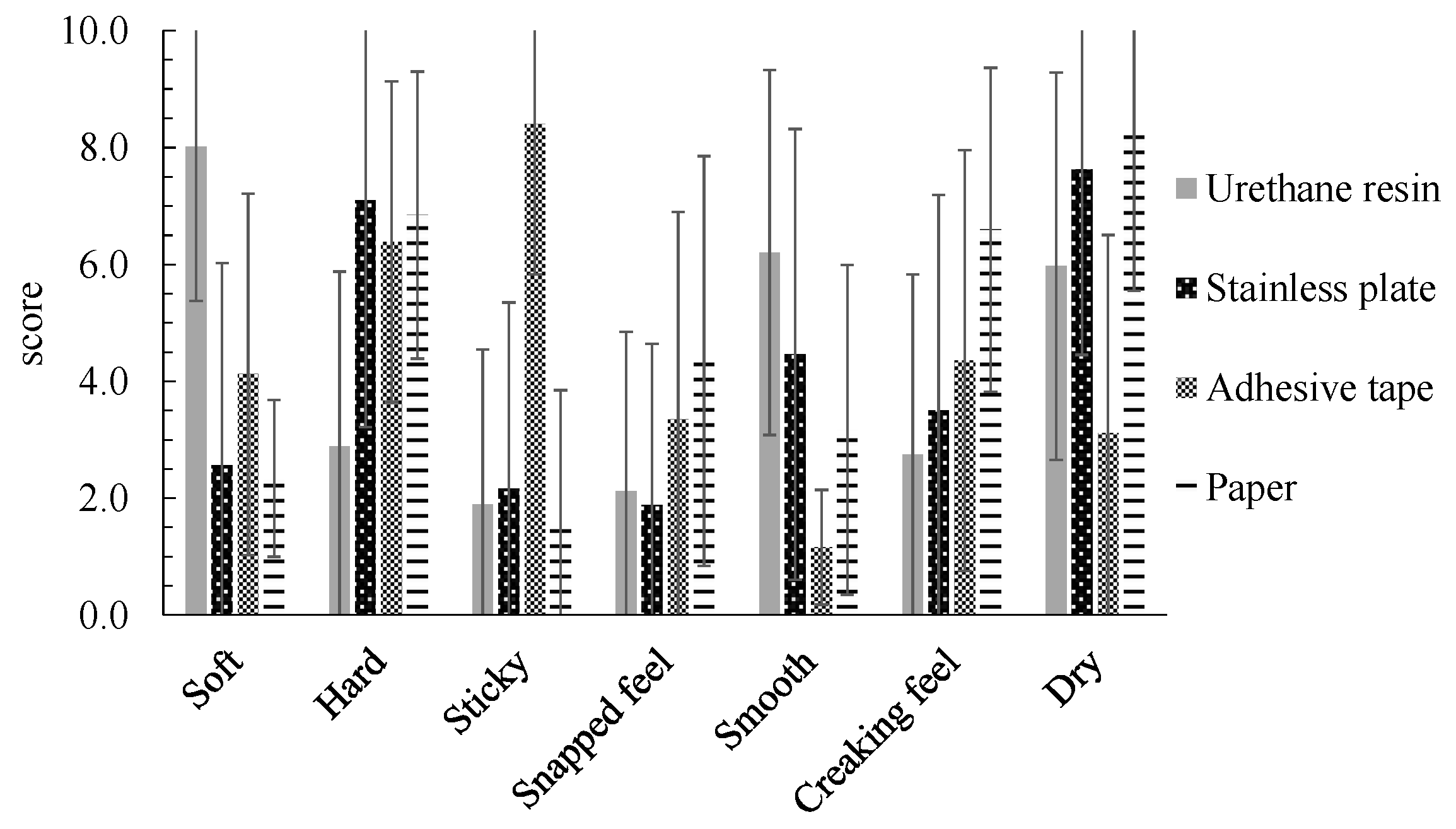
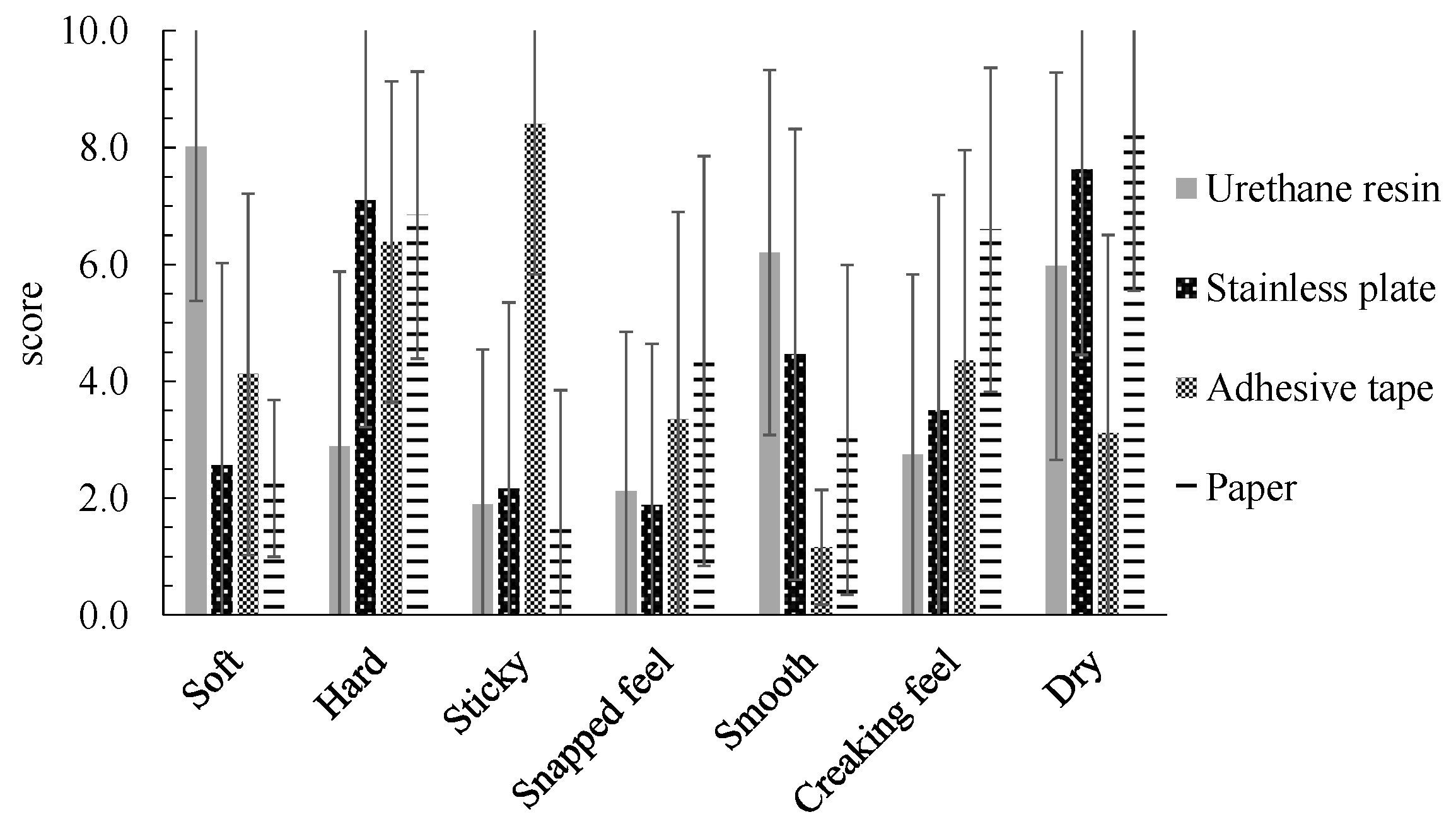
3.1. Tactile Evaluation Tests
3.2. Mechanical Evaluation Tests
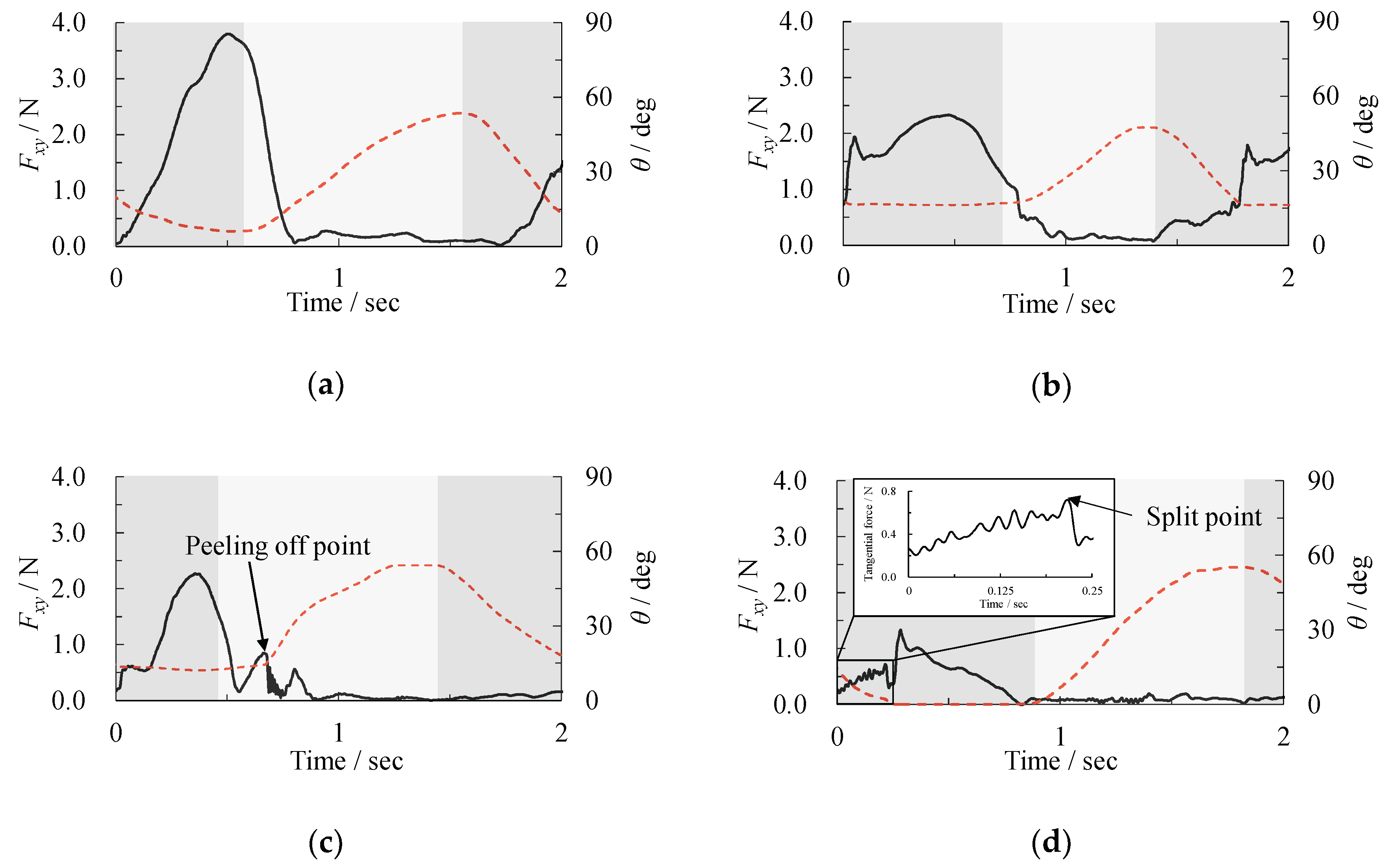
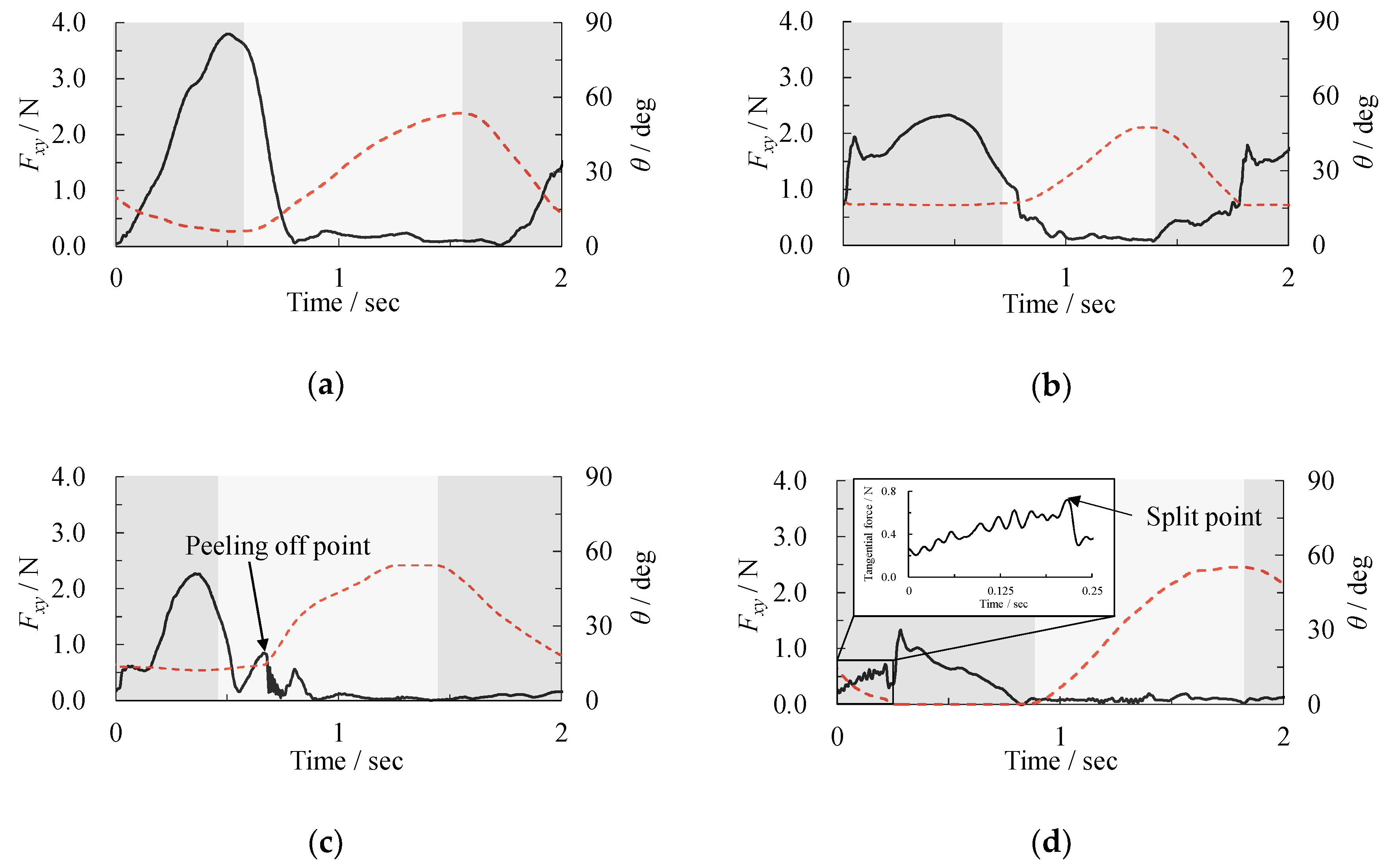
- One-step increase pattern: As shown in Figure 4a, when subjects grasped the soft urethane resin, a pattern in which Fxy increased slowly was observed in many cases. We defined this profile as a “one-step increase pattern.” From the moment when the blade touched the resin, the tangential force increased substantially with a constant slope. At 0.5 s, the force attained 3.8 N. At the start of the grasping process, θ was 18°. Then, as the force achieved maximum value, the θ decreased to 6°;
- Two-step increase pattern: As shown in Figure 4b, when a hard stainless plate was grasped by the forceps, a pattern in which Fxy increased through a two-step process was observed in many cases. The slope was mild in the second step, while it was steep in the first step. We defined this profile as a “two-step increase pattern”. After the resultant force increased to 1.9 N at 0.06 s, the force increased to 2.3 N at 0.5 s. At the start of the grasping process, θ was 17°; then, as the force achieved the maximum value, θ decreased to 16°;
- Double peak pattern: A characteristic profile was obtained when the adhesive tape was grasped (Figure 4c). We defined this profile as a “double peak pattern.” A peak, which was caused by the peeling of the tape from the blade, was observed during the handle opening. Fxy increased to 0.8 N at 0.65 s in the process of opening the handle and decreased to 0.1 N at the moment when the tape was peeled from the blade (at 0.75 s); and
- Drastic decrease pattern: When a subject cut the paper, the Fxy decreased sharply and then increased again to reach the maximum value (Figure 4d). We defined this profile as a “drastic decrease pattern.” On average, the cutting process began when the θ was 13°. The resultant force fluctuated (amplitude of 0.07 ± 0.05 N), increased to 0.7 N at 0.2 s, and then decreased to 0.3 N at the moment the cutting was completed (when θ was 1°). After that, the θ decreased to 0° and the force became 1.3 N at 0.3 s. During the cutting process, the Fxy fluctuated finely due to the friction among the scissor components and the paper.
3.3. Relationship Between the Tactile and Mechanical Evaluations
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Haag, R.; Storz, W. Surgical Scissors. In Springer Handbook of Medical Technology, 2nd ed.; Kramme, R., Hoffmann, K.P., Pozos, R.S., Eds.; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; pp. 1291–1319. ISBN 978-3-540-74658-4. [Google Scholar]
- Sergeeva, A.; Huysman, M.; Faraj, S. Transforming work practices of operating room teams: the case of the Da Vinci robot. In Proceedings of the 36th International Conference on Information Systems, Fort Worth, TX, USA, 20–22 September 2015; pp. 1–10. [Google Scholar]
- Gandevia, S.C.; McCloskey, D.I. Changes in motor commands, as shown by changes in perceived heaviness, during partial curarization and peripheral anaesthesia in man. J. Physiol. 1997, 272, 673–689. [Google Scholar] [CrossRef]
- Henningsen, H.; Ende-Henningsen, B.; Gordon, A.M. Contribution of tactile afferent information to the control of isometric finger forces. Exp. Brain Res. 1995, 105, 312–317. [Google Scholar] [CrossRef] [PubMed]
- Jones, L.A.; Piateski, E. Contribution of tactile feedback from the hand to the perception of force. Exp. Brain Res. 2006, 168, 298–302. [Google Scholar] [CrossRef] [PubMed]
- Mahvash, M.; Voo, L.; Kim, D.; Jeung, K.; Wainer, J.; Okamura, A. Modeling the forces of cutting with scissors. IEEE Trans. Biomed. Eng. 2008, 55, 848–856. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, A.; Hirota, K.; Kaneko, T. Representation of force during virtual cutting operation. EMNLP. Trans. IPS. Japan. 1999, 40, 2978–2987. [Google Scholar]
- Greenish, S.; Hayward, V.; Chial, V.; Okamura, A.; Steffen, T. Measurement, analysis, and display of haptic signals during surgical cutting. Presence 2002, 11, 626–651. [Google Scholar] [CrossRef]
- Mahvash, M.; Hayward, V. Haptic rendering of cutting: A fracture mechanics approach. Available online: https://digital.lib.washington.edu/researchworks/bitstream/handle/1773/34885/he-v2n3.pdf?sequence=1&isAllowed=y (accessed on 11 July 2018).
- Okamura, A.M.; Webster Ⅲ, R.J.; Nolin, J.T.; Johnson, K.W.; Jafry, H. The haptic scissors: Cutting in virtual environments. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 3, pp. 828–833. [Google Scholar]
- Fujino, S.; Sato, D.; Abe, K.; Konno, A.; Uchiyama, M. Displaying feeling of cutting by a micro-scissors type haptic device. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 2067–2072. [Google Scholar]
- Weiss, D.J.; Okamura, A.M. Haptic rendering of tissue cutting with scissors. In Proceedings of the 12th Annual Medicine Meets Virtual Reality Conference, Newport Beach, CA, USA; 2004; pp. 407–409. [Google Scholar]
- Fratu, A.; Fratu, M. Analytical model of the cutting process with scissors-robot for haptic simulation. Bull. Transylv. Univ. Braşov, Ser. I 2011, 4, 113–120. [Google Scholar]
- Funahashi, K.; Kubotani, D.; Iwahori, Y.; Tanida, K. Virtual scissors in a thin haptic and force feedback environment. JACIII 2009, 13, 283–288. [Google Scholar] [CrossRef]
- Nonomura, Y.; Saito, R.; Takahashi, A. Friction at fingertip surface during water contact process. Bull. Chem. Soc. Jpn. 2015, 88, 949–954. [Google Scholar] [CrossRef]
- Srinivasan, M.A.; Lamotte, R.H. Tactual discrimination of softness. J. Neurophysiol. 1995, 73, 88–101. [Google Scholar] [CrossRef] [PubMed]
- Fujita, K.; Ohmori, H. A new softness display interface by dynamic fingertip contact area control. In Proceedings of the 5th World Multiconference on Systemics, Cybernetics and Informatics, Orlando, FL, USA, 22–25 July 2001; pp. 78–82. [Google Scholar]
- Nonomura, Y.; Arashi, Y.; Maeno, T. How do we recognize water and oil through our tactile sense? Colloids Surf. 2009, 73, 80–83. [Google Scholar] [CrossRef] [PubMed]
- Nonomura, Y.; Fujii, T.; Arashi, Y.; Miura, T.; Maeno, T.; Tashiro, K.; Kamikawa, Y.; Monchi, R. Tactile impression and friction of water on human skin. Colloids Surf. 2009, 69, 264–267. [Google Scholar] [CrossRef] [PubMed]
- Nonomura, Y.; Miura, T.; Miyashita, T.; Asao, Y.; Shirado, H.; Makino, Y.; Maeno, T. How to identify water from thickener aqueous solutions by touch. J. R. Soc. Interface 2011. [Google Scholar] [CrossRef] [PubMed]
- Yogeswaran, N.; Dang, W.; Navaraj, W.T.; Shakthivel, D.; Khan, S.; Polat, E.O.; Gupta, S.; Heidari, H.; Kaboli, M.; Lorenzelli, L.; et al. New materials and advances in making electronic skin for interactive robots. Adv. Robot. 2015, 29, 1359–1373. [Google Scholar] [CrossRef] [Green Version]
- Kaboli, M.; Yao, K.; Feng, D.; Cheng, G. Tactile-based active object discrimination and target object search in an unknown workspace. Auton. Robots 2018, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Feng, D.; Kaboli, M.; Cheng, G. Active prior tactile knowledge transfer for learning tactual properties of new objects. Sensors 2018, 18, 634. [Google Scholar] [CrossRef] [PubMed]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Waga, M.; Aita, Y.; Noma, J.; Nonomura, Y. Tactile Feels in Grasping/Cutting Processes with Scissors. Technologies 2018, 6, 66. https://doi.org/10.3390/technologies6030066
Waga M, Aita Y, Noma J, Nonomura Y. Tactile Feels in Grasping/Cutting Processes with Scissors. Technologies. 2018; 6(3):66. https://doi.org/10.3390/technologies6030066
Chicago/Turabian StyleWaga, Mioto, Yuuki Aita, Junichi Noma, and Yoshimune Nonomura. 2018. "Tactile Feels in Grasping/Cutting Processes with Scissors" Technologies 6, no. 3: 66. https://doi.org/10.3390/technologies6030066
APA StyleWaga, M., Aita, Y., Noma, J., & Nonomura, Y. (2018). Tactile Feels in Grasping/Cutting Processes with Scissors. Technologies, 6(3), 66. https://doi.org/10.3390/technologies6030066