
Recent Robots in STEAM Education



Department of Computer Science, School of Sciences, International Hellenic University (IHU), 65404 Kavala, Greece
*
Author to whom correspondence should be addressed.
Educ. Sci. 2023, 13(3), 272; https://doi.org/10.3390/educsci13030272
Submission received: 22 January 2023
/
Revised: 26 February 2023
/
Accepted: 28 February 2023
/
Published: 3 March 2023
Abstract
:Robotics is increasingly entering the field of education. The tools, methods, and approaches of robotics contribute to the development of all areas of STEAM education, both individually and interdisciplinary. The present work aims to highlight the robots that are most effective in STEAM education and to classify robots used in education in terms of their frequency of use, features, flexibility, manufacturer, sensors, software, programming language, connection, recommended age, usefulness in education, and their cost. It turned out that there are packages for building robots, pre-assembled robots, and social robots. Their form can be animal, human, car, etc., and they have various properties; for example, they can move and fly. Moreover, most of the robots proposed for education use block-based programming; for example, the Scratch language. Common features of robots are that the robot follows a path, reacts to sounds, and recognizes obstacles, with various sensors; for example, vision. Finally, it turned out to be necessary to design an activity guide for each lesson, which will be accompanied by instructions and specific steps for teachers and students.
1. Introduction
The use of new technologies motivates students to learn at different educational levels. Robotics is one of the expressions of technology and takes place in various contexts of life [1]. Interest in robotics in education is growing more and more. In general, robots can be used as intelligent mobile learning objects that facilitate the understanding of complex and abstract concepts and phenomena, and students can touch them. That is why they have been the subject of much research [2,3,4,5]. The introduction of robots to school reality goes hand in hand with modern learning theories (e.g., social constructivism) which claim that knowledge arises through the interaction of the individual with the environment and is enhanced by practical activities and active involvement of the individual [6]. Robotics promotes student-centered learning, its interests, and the demands of society using innovative methods, and it is related to critical education, as it aims to develop active citizens in today’s society [7,8]. In addition, robot learning activities can provide environments that promote teamwork, collaboration, communication, and creativity. Therefore, it contributes to the development of all the basic skills of the 21st century.
Robotics can take place in a school in two ways, either as a learning object or as a means of teaching other cognitive subjects. It is inextricably linked to STEAM education. The term STEAM education means a set of educational activities focused on the fields of Natural Sciences, Technology, Engineering, Arts, and Mathematics. Robotics is one of the sections of STEAM education and, at the same time, it can contribute as a means for the development and understanding of its other fields; the tools, methods, and approaches of robotics contribute to the development of all areas of STEAM education, both individually and interdisciplinary.
The present work aims to highlight the robots that are most effective in STEAM education and to classify the robots used in education research in recent years (2016–2022) by their frequency of use, features, flexibility, manufacturer, sensors, software, programming language, connection, recommended age, usefulness in education, and their cost.
Then, it presents what STEAM education is, how robotics relates to it, and which robots have been used in education. The paper focuses on robots used in education to teach other subjects rather than robotics or programming. An attempt is then made to classify these robots and the results of the work are presented. Finally, the results are discussed, linked to the literature, and the conclusions of the paper are drawn.
2. STEAM Education
STEAM education attempts the transition from traditional teacher-centered teaching to teaching where exploratory learning plays a dominant role. Students collaborate in groups to solve problems through projects, using the scientific method (observation, hypothesis, experiment, theory, and law).
This is a general philosophy of adapting the whole educational system to combine Science and Technology. One field penetrates the other offering it its tools. Science offers the method of observation, prediction, experimentation, discovery, and reflection. Technology gives the technological means and the method of the invention of new ideas. Engineering provides information about the motion of physical bodies and the interaction of forces. The Arts offer creative expression through, for example, music, theater, painting, etc. Finally, Mathematics (Math) gives the methods of measurement, the concepts of Geometry, etc. [9].
3. Robotics in STEAM Education
In recent years, the use of robotics as a tool for learning other subjects, such as Mathematics, Physics, Language, Visual Arts, etc., has begun to be explored [10]. Robots enable the student to understand complex and abstract concepts as they make them clearer and more specific. This is achieved through the student’s contact with the robot. The robot has the role of facilitator in learning; that is, it becomes the student’s assistant [11]. The authors in Ref. [12] note in their research that few articles explore robotics approaches and methodologies for STEAM education. Therefore, there are great research opportunities in this field. Research typically examines robotics approaches in STEAM education, proposes robotic machines, explores low-cost solutions, and looks for applications that are directly related to the real world, from elementary to high school [13,14,15]. At the same time, many studies have shown that the concepts of robotics and STEAM education are inextricably linked [10,16,17,18,19,20,21]. One is the other’s helper in fulfilling their goals. Both promote teamwork, and the development of creativity and imagination in students, based on testing, experimentation, and the discovery of new knowledge. Robotics helps to teach all STEAM fields simultaneously in an applied way [22].
4. Robots That Can Be Used in Education
Currently, on the market, there is a wide variety of robotic platforms (commercial or research-derived) for STEAM education and robotics that are usually offered “ready to use”. For example, Lego Mindstorms EV3, NAO, mBot, etc. Most include a microcontroller, which is the control unit, i.e., the brain of the robot system; various sensors that detect or measure the physical properties of the environment, such as temperature, light, touch, sound, humidity, etc.; various actuators for the conversion of energy into motion, sound, light, heat, etc.; materials such as cables, batteries, gears, wheels, plastic bricks, plastic or metal parts for the assembly of various mechanical structures, e.g., robot cars, cranes, drones, watermills, and many more. They also include a software application loaded on the microcontroller and a guide to support teachers and students [23]. However, in most cases, they are not accompanied by flexible and varied lesson plans and activities. A systematic literature review was carried out in major international journals (MDPI (Basel, Switzerland), IEEE (New York USA), etc.), online digital libraries, and search engines such as Eric, Google Scholar, etc., regarding robots that have been used in education. A wide variety of educational robots were identified, most of which focused on teaching computer science and programming. Of these, only robots that have been used to teach other subjects, such as Mathematics and Physics, were selected. The type of robots was considered, and both commercial and research robots were included. Next, some of these selected robots are described in detail and their effectiveness is highlighted. The study concerns the cost of each robot, its capabilities, its use in education, and its manufacturer.
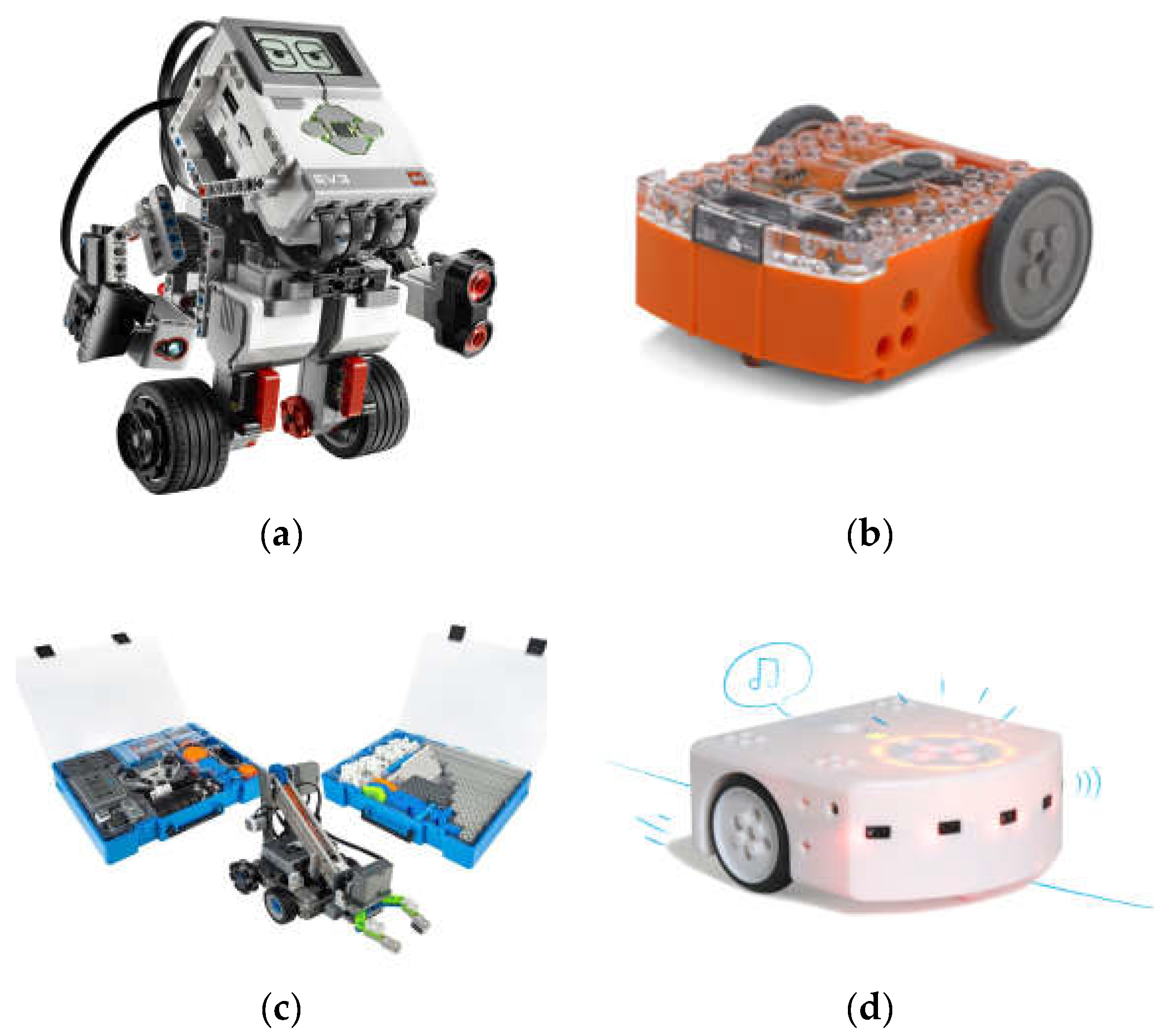
A Lego robot is the Mindstorms EV3 (Figure 1a). The Mindstorms EV3 has coded wheels, and wireless communication with the computer and costs about EUR 450 [24]. There are a variety of Lego construction kits available on the market that allow students to build and program robots quickly and easily. They consist of building materials (bricks, gears, pulleys, and shafts) and programming software with an efficient graphical interface for the development of robotic applications based on Lego robots. Robot programming results in the juxtaposition of a sequence of visualized actions, possibly related to events and/or situations generated by the applied sensors. These actions are easily configured via the graphical user interface [25]. It has color, speech, touch and gyroscope sensors, and motors. Lego robotic kits are the most commonly used robots in education, from Kindergarten to University. Assembly is their main feature. Modular design allows students to create their own robots, thus helping them improve their visual–spatial skills and motivating them to experiment and innovate [1].
The vision of the Lego Mindstorms for Schools series is to provide a powerful learning platform that will enable students to develop 21st century skills, while its mission is to enhance important problem-solving skills and social skills that are critical to success in further studies and further careers. These skills include problem-solving, creative thinking, interpersonal communication, and collaborative and teamwork skills [26]. Most research work is based on this robotic package [27]. Various concepts that have been approached with Lego packages are the concepts of power and motion in Physics [26], the concepts of functions and ratios in Algebra [28], and concepts of Geometry in classes of 5th and 6th year of primary schools.
Another modular robotics platform that allows students to perform traditional-style programming is the Vex IQ Robotics (Figure 1c), which costs around EUR 400. It includes simple programming languages and has a sufficient number of ports and a variety of sensors. One of the downsides of Vex IQ Robotics is its modular design, which does not appeal to a wide range of kids [1].
Edison Robot V2 (Figure 1b) [29] is another learning platform, but of low cost (about EUR 60), which also has special notches for placing Lego bricks. It is flexible and its size is the size of a palm (7.5 × 4 × 8.5 cm). With its sensors, it can follow a light source or a black line, move when students clap, detect obstacles, and can be programmed to be remotely controlled [30]. Depending on the age, it can be programmed with EdBlocks, EdScratch, and EdPy, which are based on familiar programming languages but are designed to work with Edison. With Edison, each student can have a robot in the classroom.
In terms of fully assembled mobile robots, the EPFL Thymio (Figure 1d) [31] is a commercially assembled robot. Thymio’s platform is reprogrammable, rich in sensors and actuators, rechargeable, and appreciated by many students as it promotes creativity and fun learning, and it is cheap and durable [32]. Thymio has five basic components, these are the following: cables, wheels, a proximity sensor, a battery, and a button unit [33]. It has a thermometer and a three-axis accelerometer. It is open-source at the software level but also at the hardware level. Thymio II has been used both at the university level and in primary and secondary education students as a teaching tool. It can be programmed with VPL, Scratch, Blockly, and Aseba programming languages. Today, its price ranges from EUR 150 to 200 [34]. Of course, this is a good price in proportion to what it offers, as it can be used for both simple and complex activities. It can be transformed and adapted to the needs of any teaching [33] and is a valuable teaching tool.
On 5 June 2014, Softbank Mobile, a Japanese company, in collaboration with Aldebaran Robotics, a French company, unveiled Pepper (Figure 2a) [35,36], the first personal humanoid robot in the world capable of helping people by reading and responding to human emotions. Pepper was scheduled to sell for less than USD 2000 in the US in February 2015 [37]. Of course, Peppers robots are only sold with the required network data and equipment security for 36 months. This costs USD 360 per month, which brings the total cost of ownership to over USD 14,000. It generally ranges from USD 14,000 to USD 14,600 [36]. The price also is approximately EUR 13,600. It has a height of 1.2 m and weighs 28 kg. It can be programmed to speak 15 languages, including Greek. Finally, it is equipped with a fully functional tablet and is an open and fully programmable platform. He is quite popular with children and is capable of conducting an entire lesson in the role of a teacher. He responds to human emotions and promotes the inclusion of students with special educational needs.
Another humanoid assembled robot is the SoftBankRobotics NAO robot (Figure 2b). The NAO robot is 58 cm in size, weighs no more than 5 kg, speaks, hears, sees, relates to the environment as programmed, and interacts naturally. It is able to perceive its environment through many sensors. It consists of two cameras, four microphones, nine touch sensors, two ultrasonic sensors, eight pressure sensors, an accelerometer, a gyroscope, a voice synthesizer, and two speakers. The robot is programmed by a block-based graphical software, Choregraphe, which communicates with NAO. This software is a graphical blockchain programming interface that provides specific tasks for NAO [38].
The use of NAO in education seems to be effective in STEAM education; it facilitates the development of scientific concepts and creates a rich framework for the development of research skills in students, such as observation, formulation of hypotheses, testing of these hypotheses with conducting experiments, data analysis and concluding, creates a positive classroom environment, and improves students’ attention and motivation [12]. However, programming is demanding; therefore, it is intimidating for teachers and students. In addition, its price (EUR 12,300) [39] is not affordable for many teachers. For this reason, NAO is more appropriate at the university and research level than in standard K-12 education [1]. This conclusion has also come up for Pepper which is even more expensive.
Humanoid robots, such as Pepper or NAO, allow individualized learning activities either on an individual basis or in small groups. They introduce new and engaging pedagogical topics and apply project-based Learning approaches. At the same time, they are an effective solution for the inclusion of all students. NAO develops children’s empathy, inspires them, guides them to do various physical and mental exercises, and contributes to the development of their social and emotional skills [40,41]. Humanoid robots are already being used to implement effective practices for inclusive education and to promote individualized learning for students with special educational needs, such as autism, emotional disorders, and behavioral disorders [42].
A cheap robot is the Beebot (Figure 2c) which costs EUR 100 [43] and is suitable for kindergarten and elementary school students. It has a bee shape and at the top, it has buttons for its programming. It is small and can be moved forward, backward, right, and left. It does not use any special software to program. Due to its appearance, it attracts young students. According to [44], it is effective in developing working memory, spatial awareness, and problem-solving ability in young students. Beebot creates a play environment suitable for children from 3 to 5 years old and is an ideal tool for teaching programming for these ages [45]. Of course, it can be used equally satisfactorily for the acquisition of mathematical and geometrical concepts [46,47].
Another robot is the mBot [48], which is an Arduino-based robot. MBot (Figure 2d) is a small mobile robot, which is cheap and has many possible expansion options. It costs EUR 100 and can be programmed using a block-based programming environment. It is created by the Chinese company, Makeblock, and based on the Scratch language that contains blocks. It is equipped with two motors for the wheels, an ultrasonic sensor, and a line sensor, and is aimed at primary and secondary school students. Students must build the robot for the first time, which can be used as part of the original workshops [49]. One of its main advantages is that it allows the user to program in a block language.
The mBot Bluetooth/WiFi is an ideal educational robot and promotes STEAM education. It enables children to get started in robotics, programming, and electronics. It can be controlled and programmed from a mobile phone, tablet, or computer via a USB cable. It is compatible with mobile devices that has Bluetooth 4.0 and Apple iOS 7 and later. The advantage of this type of educational robotic kit is that it does not require external wiring, it has RJ25 sockets that allow the connection of any sensor or external Arduino device. It also includes a programmable infrared remote control.
As mentioned, the robot mBot uses the platform Arduino as a microcontroller. Arduino [50] is one of the most popular and fastest-growing general-purpose electronic platforms. The Arduino control platform is open-type and allows the selection of a wide variety of applications. It is the basis for many robotic machines and is low-cost. Other microcontrollers often used in education are Raspberry Pi, ESP32, Texas, and microbit. Choosing the right microcontroller is a challenge for researchers designing a robot [51].
Another small intelligent robot for children is the Ozobot (Figure 3a) [52]. It contributes to the learning of STEAM education and can read colored lines drawn on paper. It has the shape of a sphere, about two and a half centimeters in diameter, its movement is based on very small wheels, and, at its base, color sensors are located. Color sensors allow it to read the color codes designed. In this way, he can perfectly follow a color line and interpret the intersections of lines. It costs about EUR 100. With Ozobot, you can design a variety of games such as racetracks, puzzles, mazes, etc. These games aim to cultivate and develop in students important skills such as creativity, autonomy, logic, and programming. Not only can Ozobot be programmed using color bars; it can also be programmed on a tablet through a block-based application called OzoBlocky, which is similar to Scratch. Thus, students will be able to carry out more complex programming as they progress in their learning (Figure 3b) [8].
Cellulo (Figure 3c) is a new robotics platform that explores the intersection of three ideas for robotics in education. These ideas are designing robots to be flexible, blending robots into the classroom by designing them to be pervasive objects and creating close interactions with paper, and finally understanding the practical limitations of real classrooms at each stage of design. The platform emerged from these considerations and is based on a unique combination of technologies. The robot connects wirelessly to a tablet (or smartphone) via Bluetooth the activity is coordinated with the QtQuick app. It also comes with optional additional dynamic content and activity sheets printed on plain paper. It is an affordable robot since it costs around EUR 125 and is suitable for use in the classroom. The role of the robot and paper depends on the goal of each activity, which makes the robot flexible [55]. Various concepts that can be approached are atmospheric pressure, force, Cartesian plane, planetary motion, molecules, and atoms.
In 2011, the authors in [56] introduced a new approach, the concept of printbots. This concept describes open-source 3D printable robots, which can be easily manufactured in 3D printers at a very low cost. Therefore, printbots are custom low-cost robots that are easy to build. In addition, as printbots are open; communities are sharing their designs. This has enabled users to upgrade their robots and adapt them to their needs; thus, printbots are evolving and differentiating [56]. This can be seen on sites like Thingiverse [57], featuring a variety of printbots, both simple wheeled robots, and complex four-legged robots or even robotic arms. Another site repository is GitHub [58], in which one can locate the FossBot (discussed below).
Another robot based on the Arduino platform designed from 3D printable materials is the Otto DIY + robot (Figure 4a) [59]. Its price is around EUR 45 and increases depending on the possibilities it provides. It is fully programmable with Blockly or Arduino. It is easy to build, scalable, and modular. It is suitable for beginners in the world of robotics and STEM. The Otto robot can walk, dance, make sounds, gesture, and avoid obstacles. It can be used to teach programming to students while completing other educational activities. Moreover, the programmed Otto robot can be easily stored and transported anywhere; each student could have their own robot and use it at home [60].
Otto comes with a variety of applications and games (Figure 4b) [61,62]. Through his games, the children prepare for programming and learn to code while having fun. This way, programming becomes exciting and easy for everyone. The main game that accompanies the robot has Otto as its hero. It is an interactive, free, educational game, and suitable for anyone who wants to start programming with Blockly, Python, and JavaScript, as it is based on both block and text programming. A student can connect from any computer or tablet, as long as they have an Internet connection. The aim of the game is for students to program the robot so that it can face the challenges and adventures that take place around it.
Activities and games with the Otto robot promote computational thinking; that is, they support problem-solving and Mathematics, and develop critical thinking and basic concepts from computer science. They are based on scenarios, which motivate children, as they make the learning process fun and playful. Its integration into the curricula supports and guides the learning process. Finally, it enables teachers to monitor students’ progress at each level as they progress through the game [63].
Another printable robot is FOSSbot [64] (Free Open Source Software Bot—Figure 4c) [65], an educational robot that is suitable for kindergarten and primary school, although the creation of educational scenarios for all levels of education has begun. FOSSbot was built by the open technologies organization EELLAK in collaboration with Harokopio University and is a printable open-source robot, both in its construction and its software. Open source codes can be adapted and support even more teaching scenarios. Its codes and files are uploaded to the internet completely free of charge, so the cost is only for the supply of materials that will be used for its printing. It has a variety of sensors such as distance, line, accelerometer, gyroscope, IR, light sensor, a sensor for odometry, and battery sensor. It can also talk; it has a case on the front where a marker or pencil can be placed, and its surface is compatible with Lego bricks. Thus, it can be used in various ways in the classroom, as the various sensors and actuators can give to teachers the ability to create numerous lessons and activities that cover a wide range of scientific disciplines. The total cost for printing and supplying all materials is under EUR 200 [66]. This price, although considered high for the average family, is low based on the possibilities it offers.
5. Programming Languages
In the description of the above robots, the related programming languages were mentioned. Some of these languages are presented in more detail below. First, there are traditional scripting languages and visual programming languages. The first category includes Python [66,67,68], C, C++, Java, JavaScript [69], etc., and is the basis for the creation of the second, i.e., visual programming languages.
In primary school age or education in general, it would be easier to use a visual programming language. The term “visual programming language” means a programming language that is based on visual expressions and is suitable for beginners [70]. These expressions are either icons and blocks (puzzles), or diagrams and forms, which act as commands and conditions for the user to program the robot object he desires. These expressions are asked by the user to drag them and put them in the appropriate order to write the code that will command the robot to act. Some visual programming languages used in education are AgentSheets, App Inventor (for Android), Blocky, Bubble, Scratch, etc.
One of the most popular languages is Scratch (Figure 5). This is evidenced by the fact that it has been used in a variety of studies [71,72,73,74,75,76,77,78,79,80,81]. Scratch’s goal is for students to learn programming concepts by playing and creating videos and music. In other words, it enables teachers to use it as a means of teaching in their classrooms. Scratch is free and available online. Its shape makes it quite attractive to students of both primary and secondary education. Moreover, one of its advantages is that it is dynamic, as users can edit and modify its code while it is running. Behind the visual expressions, the executable code runs in the Squeak (Scratch 0. x, Scratch 1. x) or ActionScript (Scratch 2.0) written programming languages. According to the research in [28], 50% of the published work they found on STEAM education uses Scratch. Scratch can be an important lead in introducing advanced students to the Python programming language [82].
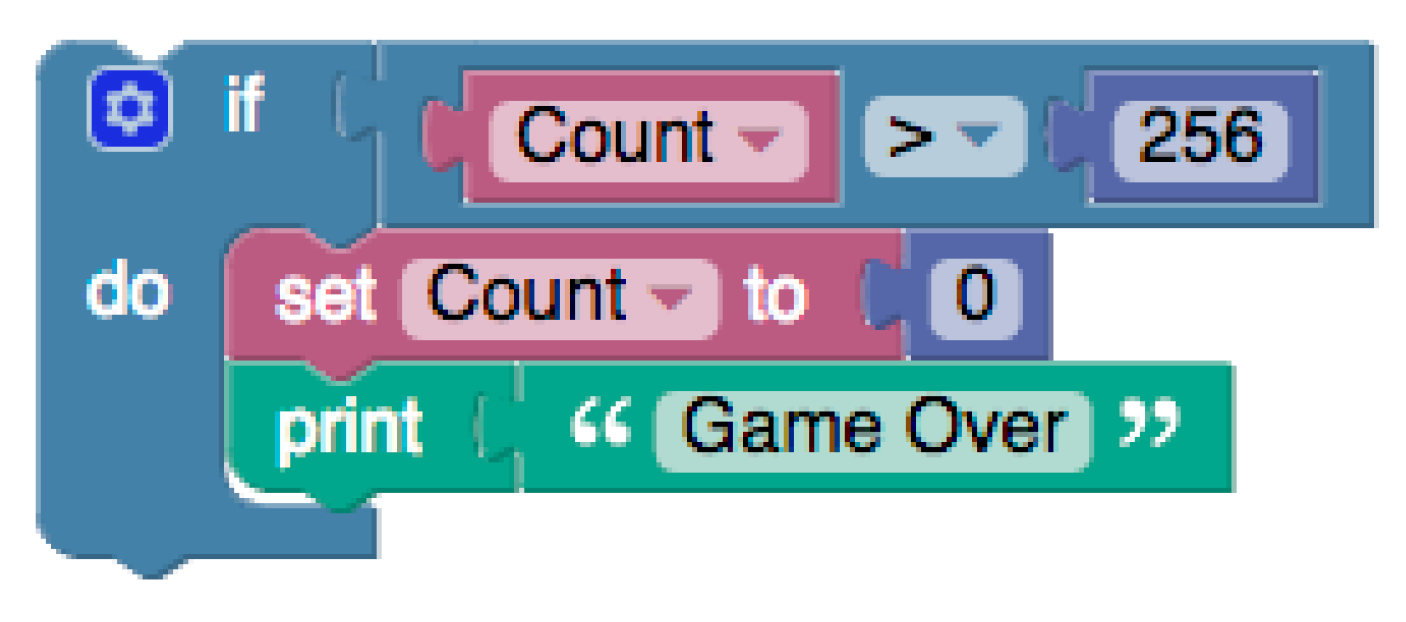
Google Blockly [66,83], is a language similar to Scratch and supports the logic of drag and drop, i.e., “drag and drop” (Figure 6). Its programming is based on traditional JavaScript, Python, PHP, Lua, or Dart languages and is available for free. Its commands are in the form of block puzzles, which are connected to create the respective scenario [84].
Finally, Snap [85] is also a form of block programming language (Figure 7). One of the advantages of Snap is that it allows students to program for free directly on a website, without the need to install any software. It has all the basic functions of Scratch with the advantage that it gives the user the ability to create new block commands and share them in the Snap community. It is very simple to use. Instructions for its use are available on the website [86]. In general, it is observed that visual programming languages can increase students’ interest in mathematical concepts and robotics, advance their computational thinking and prepare them for more advanced programming languages and robotics designs [87].
6. Classification of Robots—Results
The present work attempts to classify robots in terms of their frequency of use, their features, their flexibility, their manufacturer, their sensors and actuators, the software they use, their connectivity, recommended age, their usefulness in education, and their cost. According to the latter criterion, robots are classified as low, medium, and high cost. In the first category are classified the robots whose price is under EUR 60 (L), a fact that makes them accessible to all teachers and students. This limit results from the researcher’s many years of experience in schools in Greece, both in large urban centers and in small rural villages and islands. It was assumed that the average Greek family and public school staff can allocate up to EUR 60 for the purchase of additional learning materials. The second category is the robots that cost from EUR 60 to 300 (M), which can be purchased by a school and are available for all classes. These robots offer more possibilities, but it is not easy for students to have their own robots. The last category includes robots that cost over EUR 300 and enter the classroom mainly for research purposes and they are difficult to be used by public school teachers in their daily lives. These robots are symbolized on the board by the letter H (H). It is also clarified that by the category “frequency of use”, the authors mean the frequency with which they appeared in the research they studied.
Table 1 shows the robots that have been used in recent years for STEAM education that emerged from the literature review.
From Table 1, the following diagrams and conclusions about the characteristics of the robots emerge. First, a graph is presented with the cost of each robot (Figure 8).
According to Table 1 and Figure 8, both low-cost and high-cost robotic machines have been proposed for education. It seems that the majority of social bots in human form tend to have a high cost as they provide more features to their users. In fact, the most expensive robot among those selected appeared to be Pepper, which costs EUR 13,600. It also becomes apparent that robots made from printable materials have a lower cost (Otto DIY + and FOSSbot). In fact, of the robots selected, the most economical turned out to be the Otto DIY +, which costs EUR 45. Finally, most of the robots identified in this paper are of medium cost based on the classification criteria set. Many of these robots are mentioned in the literature as low-cost, but this paper characterizes as low-cost robots only those that are easy for every student to acquire, so a maximum limit of EUR 60 is set, based on the data of the Greek family. Based on the criteria of this work, two low-cost robots, seven medium, and four high-cost robots were identified.
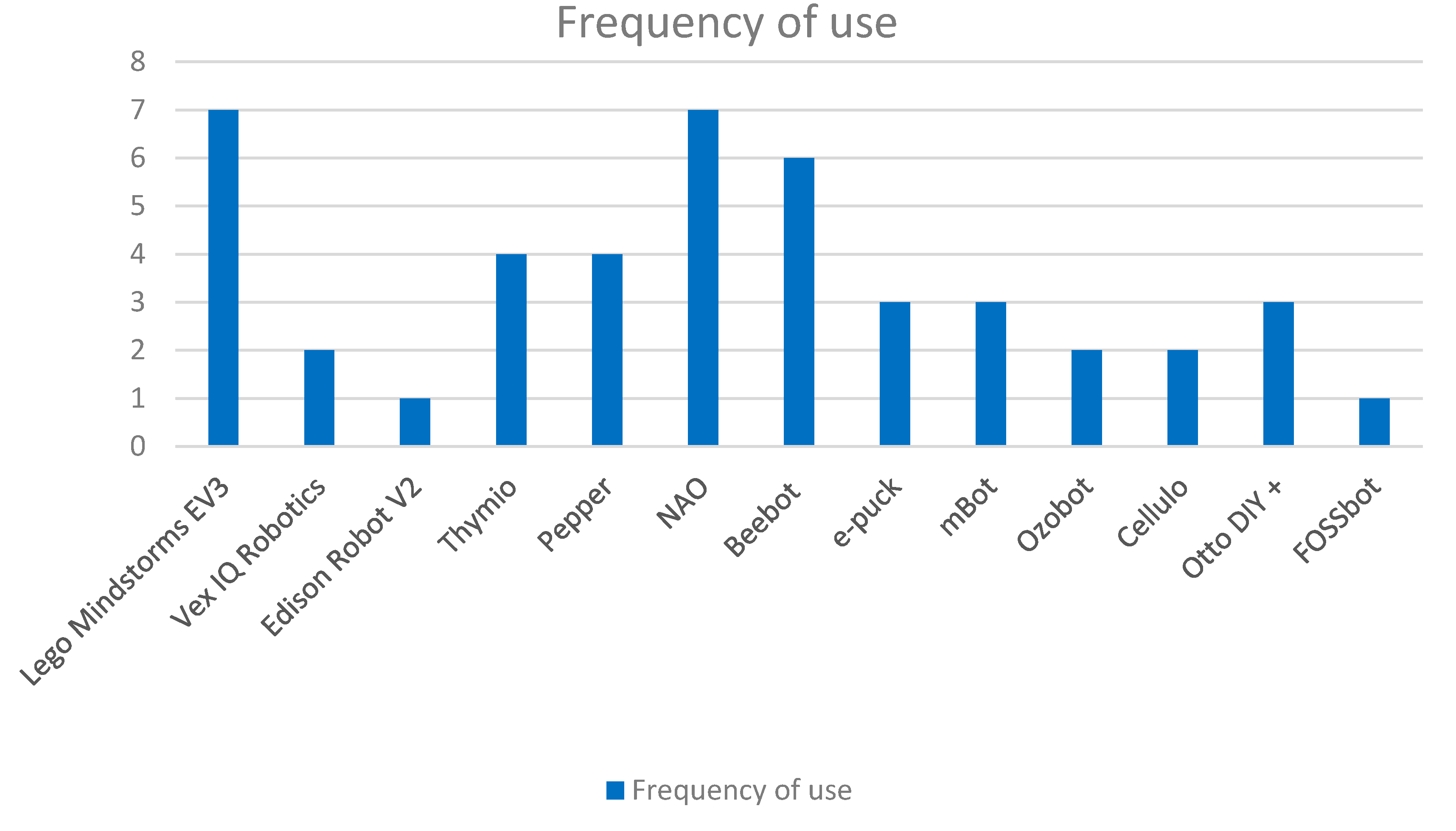
Figure 9 and Table 1 show the frequency of use of robots in recent years. More specifically, it shows the frequency of robots in the research covered by this paper; that is, in the total number of jobs identified, and how many used each robot to teach the lessons that make up STEAM education. It appears that Lego Mindstorms and NAO were most frequently used in education, with a frequency of seven, followed by Beebot with a frequency of six. Moreover, Thymio, Pepper, e-puck, mbot, and Otto DIY+ robots were used with moderate frequency, i.e., three or four of articles from those used in research refer to these robots. Finally, with a frequency of one or two, VEX IQ Robotics, Edison V2, Ozobot, Cellulo, and FOSSbot were used. So, there are indications that Lego Mindstorms and NAO are used more often.
At the same time, in Table 1, the robots are addressed to various age groups. Some robots can be used at all ages depending on how they will be utilized, such as Thymio, while others are more suitable for specific age groups. Beebot is suitable for Kindergarten and the first grades of primary school, while mBot and Otto DIY + are suitable for elementary school students in the last classes. The Lego Mindstorms EV3, although used for all ages, is more suitable for older students and specifically for High School. The Pepper and NAO robots are mainly used in university education. Finally, Fossbot has been used in primary and secondary education.
Of the above robots, it is observed that about half were characterized as flexible. Edison Robot V2, e-puck, Cellulo, Thymio, and robots using Arduino and Raspberry Pi platforms, i.e., Otto DIY + and FOSSpot, respectively, were characterized as flexible. They can be used at all ages and are adapted to the needs of each teaching purpose and each student. At the same time, from the selected robots, it is observed that in addition to Lego Mindstorms, two more robots have special slots for Lego bricks, Edison V2 and FOSSbot.
In terms of the usefulness of robots that seemed to be used most often in education, in addition to the common goals they meet, each is more appropriate and effective in achieving certain other goals. The Lego Mindstorms EV3 robotic package is ideal for teaching programming and developing algorithmic thinking. It has also been used effectively in teaching Engineering concepts, proportions, and functions. Thymio can be transformed and adapted to the needs of each teaching procedure and promotes the development of social skills and collaboration skills. The Pepper humanoid robot helps teach emotions and communication skills to students on the autism spectrum. NAO serves similar purposes, which is suitable for Special Education, as it improves the attention and motivation of students. Both of these robots are the perfect helpers for teachers and promote the concept of inclusion, taking into account the needs of all students and especially students with special educational needs. The Beebot is most effective in developing working memory, spatial awareness, and problem-solving ability in young learners. MBot enables children to get started in robotics, programming, and electronics. Otto DIY + is suitable for beginners in the world of robotics and STEAM. Finally, FOSSbot adapts to a variety of educational activities.
7. Discussion
This paper selected some of the robots that have been used in STEAM education in recent years, specifically identifying research from 2016 onwards. During this time, a variety of robots were used, both commercial and research-derived. Finally, the work focused on 13 robots; we tried to choose robots of various kinds, and the main criterion was that they have been utilized in the teaching of other cognitive subjects beyond programming. The research presented difficulties as most robots enter the school for programming classes, as pointed out by [12]. Nevertheless, a representative sample was selected; that is, ready-made robotics packages, social robots, car or animal robots, printable robots, etc. were selected. Of course, there are other robots in the literature, but the desire was to investigate a general trend. These robots were studied in terms of frequency of use, capabilities, flexibility, manufacturer, sensors, software, programming language, connectivity, recommended age, usefulness in education—i.e., how they have been used—and their cost.
Initially, in terms of cost, robots were classified into a low, medium, and high costs, setting specific limits for each category. In the context of inclusion, the researchers desire to identify a robot that will not exclude any student from the learning process and from the possibility of being able to purchase their own robot to use both at school and home. This limit emerged through many years of experience in public schools, from frequent conversations with parents and knowing the financial difficulties of schools. It is worth noting that the school is now characterized by the element of multiculturalism, a fact that was taken into account in the decision to set the limit up to EUR 60 for economic robots. There are many families, both Greek and from other countries, who try to survive on the basic salary. Of course, it seems that it is desirable to locate a robot that will be economical but also flexible, and it will provide a variety of possibilities for teachers and students. This seems not to be easy; only two robots were classified in the low-cost robot category: Edison Robot V2 and Otto DIY +.
Most robots were classified in the mid-cost category. This does not mean that we can exclude a robot from teaching because it is not economical. The choice also depends on the possibilities it offers, i.e., a robot may have a medium cost, but based on its possibilities it is worth buying (value for money). For example, the FOSSbot costs EUR 190, but it is a flexible open-ended robot with several sensors that can be used by an educator in teaching STEAM education fields. So, it might not be easy for every student to acquire their own, but maybe every school could acquire some, which would be available for all classes. It is important to mention that some robots that have been characterized as mid-cost in other surveys are here referred to as economical, this depends on the limits and criteria set by each researcher. In their survey in [114], the authors set the limit up to EUR 180 for economic robots.
In the category of expensive robots, Lego Mindstorms was classified. This particular robotics package costs EUR 450, which does not allow parents and schools to obtain it easily. It is quite expensive for the average Greek family. Of course, here we are in contrast to the literature where Lego packages are characterized as economic [115]. Legos have been used effectively in teaching various Math and Physics concepts. For example, they can be used to teach proportions through the relationship of distance to time, which gives speed. However, the objectives of this teaching procedure can be achieved with other mobile robots which are more economical and have similar sensors, e.g., mBot, Edison, and FOSSbot.
In general, the possibilities that Lego Mindstorms provide are also provided by printable robots. In fact, in printable robots, each teacher or researcher can adapt the robot to his teaching and evolve it each time by adding new sensors. For these robots, anyone who wants can constantly acquire new ideas on how to use them from various forums where researchers share their ideas. In general, the benefits of these robots are many and, combined with their economic price, they are considered one of the best options for STEAM education [55,116]. It is noted that the processors used by these selected robots are Arduino and Raspberry Pi.
The social robots namely Pepper and NAO were rated as the most expensive robots, a fact that makes them inaccessible based on Greek data and the criteria set; that is, it would not be possible for students to have their own robots. This is also the reason why they are mainly used in university education. However, these are robots with countless sensors, capabilities, and benefits for all students. For example, Pepper can be effectively used in the school classroom to replace the teacher and engage students, since students are impressed by such social robots.
Perhaps a more suitable robot for our humanoid approaches is the Otto DIY+. It can be used to give the student a reference point to reward and communicate with. For example, every time the student answers a question correctly Otto can dance or make different musical sounds. Moreover, sad music can be heard in case of a mistake. With the right lesson plans, Otto could be used to teach students about emotions and social skills. At the same time, the fact that it is printable makes it flexible; it can be adapted to various teaching subjects. For example, with a color sensor, equivalent fractions can be taught. The teacher can give the students shapes cut into parts that, when joined, give them the whole. In one case they should be cut into four pieces, in the other, into six, etc. Every time the robot recognizes a color it will produce music. Students will count the time the music lasts, so they can conclude that the music lasts the same time whether the robot goes through two of the four tracks or three of the six. The above teaching could be conducted with any inexpensive robot as long as it has a color sensor and can produce sounds.
At this point, it is worth noting that none of the robots identified had a guide with specific lesson plans or their own comprehensive curriculum for STEAM education but only focused on specific modules. Such a guide would be very useful for teachers because often they want to include robotics in their classroom as a means and method of teaching but do not know how, which creates fear and insecurity in using robots.
At the same time, it is important that the robot that will be chosen enables the use of visual programming. Almost all the robots selected met this criterion. This is especially necessary for elementary schools. This way it will be easier later on for students, at other levels of education, to understand programming in text. The most commonly used visual programming language is Scratch [72,73,74,75,76,77,78,79,80,81]. This view converges with the literature [114]. In fact, according to [28], 50% of the studies they found for STEAM education use Scratch.
In terms of the frequency of use of these robots in STEAM education in recent years, Lego Mindstorms [69,75,88,89,90,91,92] and NAO [12,38,101,102,103,104,105] are the ones used most often. According to the same researchers, Lego packages are the ones that are used most often; this happens if we take into account the research focusing on teaching using robots, the research focusing on programming lessons, and earlier research [28]. Generally, in the early years of robotics in schools, Lego packs were exclusive. Over the years, other robotic machines have appeared, so it is now reported that other robots are used just as often. Regarding the fact that the Lego Mindstorms and the NAO show a similar frequency, even bigger and more extensive research in the future could change this result. This may be both a limitation of the present research and a suggestion for further investigation.
Moreover, the Thymio robot has been used effectively in education. In fact, it has been used by students and in research with swarms of robots [94,95,96,97]. Moreover, at younger ages, we find Beebot quite often [8,44,45,46,47,106], and, at older ones, mBot [8,49,109]. All the above robots used in recent years are commercial. However, it is observed that printable robots, using microcontrollers such as Arduino and Raspberry, have also gained a lot of ground in recent research. These robots are mostly self-built by researchers looking for a more economical solution. Such robots are Otto DIY + [60,112,113] and FOSSbot [66]. However, the need to design integrated curricula that will focus on STEAM education remains imperative.
8. Conclusions
The purpose of this paper was to identify robots that have been used in recent years in STEAM education and classify them in terms of frequency of use, capabilities, flexibility, manufacturer, sensors, software, programming language, connectivity, recommended age, the educational usefulness—i.e., how they have been used—and their cost. Then, we compared these robots based on specific criteria. The biggest focus was on the cost of the robots, as the researchers’ desire was to find an affordable robot so that every student could have his own robot. Moreover, another criterion was the flexibility of the robots, i.e., being able to adapt to the needs of teaching in all STEAM fields. The final goal was the selection of a robot, and to study how it can be used in teaching in the future.
Based on the results of the survey, it was found that it is difficult to identify a robot for all subjects. Nevertheless, there are indications that printable robots meet the above criteria and are a good choice for promoting STEAM education. For more effective teaching in primary school age, it would be good to choose robots based on a visual programming language.
It is worth noting, however, that not enough research was found on how robots can be used as teaching tools. Therefore, the future goals of the researchers are to study more thoroughly how these robots are used as teaching tools in the school classroom and to identify teaching scenarios. Finally, after choosing one of the printable robots, a guide with teaching plans for Math and Physics concepts will be designed.
Author Contributions
Conceptualization, M.K. and T.P.P.; methodology, M.K. and T.P.P.; validation, M.K. and T.P.P.; formal analysis, M.K. and T.P.P.; investigation, M.K. and T.P.P.; resources, T.P.P.; writing—original draft preparation, M.K.; writing—review and editing, M.K. and T.P.P.; visualization, M.K. and T.P.P.; supervision, T.P.P.; funding acquisition, T.P.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Pachidis, T.; Vrochidou, E.; Kaburlasos, V.G.; Kostova, S.; Bonkovic, M.; Papic, V. Social robotics in education: State-of-the-art and directions. In International Conference on Robotics in Alpe-Adria Danube Region; Aspragathos, N., Koustoumpardis, P., Moulianitis, V., Eds.; Springer: Cham, Germany, 2018; Volume 67, pp. 689–700. [Google Scholar]
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Atmatzidou, S.; Demetriadis, S. A Didactical Model for Educational Robotics Activities: A Study on Improving Skills through Strong or Minimal Guidance. In Educational Robotics in the Makers Era; Springer: Cham, Germany, 2016; pp. 58–72. [Google Scholar] [CrossRef]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Komis, V.; Romero, M.; Misirli, A. A Scenario-Based Approach for Designing Educational Robotics Activities for Co-Creative Problem Solving. In Educational Robotics in the Makers Era; Springer: Cham, Germany, 2016; pp. 158–169. [Google Scholar] [CrossRef]
- Vygotsky, L.S. Mind in Society: The Development of Higher Psychological; Harvard University Press: Cambridge, MA, USA, 1978. [Google Scholar]
- Günbatar, M.S.; Bakırcı, H. STEM teaching intention and computational thinking skills of pre-service teachers. Educ. Inf. Technol. 2019, 24, 1615–1629. [Google Scholar] [CrossRef]
- Román-Graván, P.; Hervás-Gómez, C.; Martín Padilla, A.H.; Fernández Márquez, E. Perceptions about the Use of Educational Robotics in the Initial Training of Future Teachers: A Study on STEAM Sustainability among Female Teachers. Sustainability 2020, 12, 4154. [Google Scholar] [CrossRef]
- Nuangchalerm, P.; Prachagool, V.; Prommaboon, T.; Juhji, J.; Imroatun, I.; Khaeroni, K. Views of Primary Thai Teachers toward STREAM Education. Int. J. Eval. Res. Educ. 2020, 9, 987–992. [Google Scholar] [CrossRef]
- Karim, M.E.; Lemaignan, S.; Mondada, F. A review: Can robots reshape K-12 STEM education? In Proceedings of the IEEE International Workshop on Advanced Robotics and Its Social Impacts (ARSO 2015), Lyon, France, 1–3 July 2015; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Miller, D.P.; Nourbakhsh, I. Robotics for Education. In Springer Handbook of Robotics; Siciliano, D., Khatib, O., Eds.; Springer Science & Business Media: Berlin, Germany, 2016; pp. 2115–2134. [Google Scholar] [CrossRef]
- Bravo, F.; Hurtado, J.; González, E. Using Robots with Storytelling and Drama Activities in Science Education. Educ. Sci. 2021, 11, 329. [Google Scholar] [CrossRef]
- Bellas, F.; Naya, M.; Varela, G.; Llamas, L.; Prieto, A.; Becerra, J.C.; Bautista, M.; Faina, A.; Duro, R. The Robobo Project: Bringing Educational Robotics Closer to Real-World Applications. In Robotics in Education. RiE 2017; Springer: Cham, Germany, 2018. [Google Scholar] [CrossRef] [Green Version]
- Karkazis, P.; Balourdos, P.; Pitsiakos, G.; Asimakopoulos, K.; Saranteas, I.; Spiliou, T.; Roussou, D. To water or not to water: The Arduino approach for the irrigation of a field. Int. J. Smart Educ. Urban Soc. 2018, 9, 25–36. [Google Scholar] [CrossRef] [Green Version]
- Moro, M.; Agatolio, F.; Menegatti, E. The development of robotic enhanced curricula for the RoboESL project: Overall evaluation and expected outcomes. Int. J. Smart Educ. Urban Soc. 2018, 9, 48–60. [Google Scholar] [CrossRef]
- Altin, H.; Pedaste, M. Learning approaches to applying robotics in Science Education. J. Balt. Sci. Educ. 2013, 12, 365–377. [Google Scholar] [CrossRef]
- Barnes, J.; FakhrHosseini, S.M.; Vasey, E.; Park, C.H.; Jeon, M. Child-Robot Theater: Engaging Elementary Students in Informal STEAM Education Using Robots. IEEE Pervasive Comput. 2020, 19, 22–31. [Google Scholar] [CrossRef]
- Chatzopoulos, A.; Papoutsidakis, M.; Kalogiannakis, M.; Psycharis, S. Action Research Implementation in Developing an Open Source and Low Cost Robotic Platform for STEM Education. Int. J. Comput. Appl. 2019, 178, 33–46. [Google Scholar] [CrossRef]
- Eguchi, A.; Okada, H. Learning with social robots—The World Robot Summit’s approach. In Proceedings of the IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 10 March 2018. [Google Scholar] [CrossRef]
- Psycharis, S.; Kotzampasaki, E. The Impact of a STEM Inquiry Game Learning Scenario on Computational Thinking and Computer Self-Confidence. EURASIA J. Math. Sci. Technol. Educ. 2019, 15, em1689. [Google Scholar] [CrossRef]
- Sullivan, A.; Strawhacker, A. Screen-Free STEAM: Low-Cost and Hands-on Approaches to Teaching Coding and Engineering to Young Children. In Embedding STEAM in Early Childhood Education and Care; Cohrssen, C., Garvis, S., Eds.; Palgrave Macmillan: Cham, Germany, 2021; pp. 87–113. [Google Scholar]
- Kazakoff, E.R.; Sullivan, A.; Bers, M.U. The effect of a classroom-based intensive robotics and programming workshop on sequencing ability in early childhood. J. Early Child. Educ. 2013, 41, 245–255. [Google Scholar] [CrossRef]
- Kucuk, S.; Sisman, B. Behavioral patterns of elementary students and teachers in one-to-one robotics instruction. Comput. Educ. 2017, 111, 31–43. [Google Scholar] [CrossRef]
- BrickEconomy Home Page. Available online: https://www.brickeconomy.com/set/31313-1/lego-mindstorms-ev3 (accessed on 19 November 2022).
- Alimisis, D.; Moro, M.; Arlegui, J.; Pina, A.; Frangou, S.; Papanikolaou, K. Robotics & Constructivism in Education: The TERECoP project. In EuroLogo 2007, 40 Years of Influence on Education, Proceedings of the 11th European Logo Conference, 19–24 August 2007; Kalas, I., Ed.; Comenius University: Bratislava, Slovakia, 2007. [Google Scholar]
- Goh, H.; Ali, M.B.B. Robotics As a Tool to STEM Learning. Int. J. Innov. Educ. Res. 2014, 2, 66–78. [Google Scholar] [CrossRef]
- Kim, S.W.; Lee, Y. The analysis on research trends in programming based STEAM education in Korea. Indian J. Sci. Technol. 2016, 9, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, E.; Fermé, E.; Oliveira, R. Using Robots to Learn Functions in Math Class. 2017. Available online: http://cee.uma.pt/people/faculty/elsa.fernandes/artigos/ICMI17.pdf (accessed on 2 December 2021).
- Edison Home Page. Available online: https://meetedison.com/wp-content/uploads/2016/09/Edison-V2.0-Educational-robot.jpg (accessed on 19 November 2022).
- Ververi, C.; Koufou, T.; Moutzouris, A.; Andreou, L.V. Introducing Robotics to an English for Academic Purposes Curriculum in Higher Education: The Student Experience. In Proceedings of the 2020 IEEE Global Engineering Education Conference (EDUCON), Porto, Portugal, 27–30 April 2020. [Google Scholar] [CrossRef]
- Thymio Home Page. Available online: http://www.thymio.gr/ (accessed on 19 November 2022).
- Riedo, F.; Chevalier, M.; Magnenat, S.; Mondada, F. Thymio ii, a robot that grows wiser with children. In Proceedings of the 2013 IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO), Tokyo, Japan, 7–9 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 187–193. [Google Scholar]
- Riedo, F.; Retornaz, P.; Bergeron, L.; Nyffeler, N.; Mondada, F. A Two Years Informal Learning Experience Using the Thymio Robot. In Advances in Autonomous Mini Robots; Springer: Berlin/Heidelberg, Germany, 2012; pp. 37–48. [Google Scholar]
- Generation Robots Home Page. Available online: https://www.generationrobots.com/en/401213-mobile-robot-thymio-2.html (accessed on 19 November 2022).
- Aldebaran Home Page. Available online: https://www.aldebaran.com/en/pepper (accessed on 19 November 2022).
- Bots.co.uk Home Page. Available online: https://bots.co.uk/pepper-robot-price/ (accessed on 19 November 2022).
- Eguchi, A. Robotics as a Learning Tool for Educational Transformation. In Proceedings of the 4th International Workshop Teaching Robotics, Teaching with Robotics & 5th International Conference Robotics in Education, Padova, Italy, 18 July 2014; pp. 27–34. [Google Scholar]
- Lopez-Caudana, E.; Ramirez-Montoya, M.S.; Martínez-Pérez, S.; Rodríguez-Abitia, G. Using Robotics to Enhance Active Learning in Mathematics: A Multi-Scenario Study. Mathematics 2020, 8, 2163. [Google Scholar] [CrossRef]
- STEM SUPPLIES Home Page. Available online: https://stem-supplies.com/nao-v6-programmable-robot (accessed on 19 November 2022).
- Mubin, O.; Stevens, C.J.; Shahid, S.; Al Mahmud, A. A Review of the Applicability of Robots in Education. J. Technol. Educ. Learn. 2013, 1, 13. [Google Scholar] [CrossRef] [Green Version]
- Ziouzios, D.; Rammos, D.; Bratitsis, T.; Dasygenis, M. Utilizing Educational Robotics for Environmental Empathy Cultivation in Primary Schools. Electronics 2021, 10, 2389. [Google Scholar] [CrossRef]
- Lytridis, C.; Vrochidou, E.; Chatzistamatis, S.; Kaburlasos, V. Social Engagement Interaction Games Between Children with Autism and Humanoid Robot NAO. In Proceedings of the 13th International Conference on Soft Computing Models in Industrial and Environmental Applications, San Sebastian, Spain, 6–8 June 2018; pp. 562–570. [Google Scholar]
- STEM-Toys Home Page. Available online: https://stem-toys.gr/product/beebot-2/ (accessed on 19 November 2022).
- Messer, D.; Thomas, L.; Holliman, A.; Kucirkova, N. Evaluating the effectiveness of an educational programming intervention on children’s mathematics skills, spatial awareness, and working memory. Educ. Inf. Technol. 2018, 23, 2879–2888. [Google Scholar] [CrossRef] [Green Version]
- Kwon, U.-J.; Nam, K.-W.; Lee, J.-H. Exploring the effects of unplugged play for children aged 3, 4, and 5: Based on Bee-bot. Int. J. Adv. Cult. Technol. 2020, 8, 239–245. [Google Scholar] [CrossRef]
- González, J.; Morales, I.; Nielsen, M.; Muñoz, L.; Villarreal, V. Improving the Teaching of Mathematics through Robotics. Proceedings 2019, 31, 5. [Google Scholar] [CrossRef] [Green Version]
- Di Lieto, M.C.; Inguaggiato, E.; Castro, E.; Cecchi, F.; Cioni, G.; Dell’Omo, M.; Laschi, C.; Pecini, C.; Santerini, G.; Sgandurra, G.; et al. Educational Robotics intervention on Executive Functions in preschool children: A pilot study. Comput. Hum. Behav. 2017, 71, 16–23. [Google Scholar] [CrossRef]
- Makeblock Home Page. Available online: www.makeblock.com/STEM-kits/mbot (accessed on 19 November 2022).
- Bellas, F.; Salgado, M.; Blanco, T.F.; Duro, R.J. Robotics in Primary School: A Realistic Mathematics Approach. In Smart Learning with Educational Robotics: Using Robots to Scaffold Learning Outcomes; Linda, D., Ed.; Springer International Publishing: Cham, Germany, 2019; pp. 149–182. [Google Scholar]
- Arduino Home Page. Available online: http://arduino.cc (accessed on 19 November 2022).
- Evripidou, S.; Doitsidis, L.; Tsinarakis, G.; Zinonos, Z.; Chatzichristofis, S.A. Selecting a Robotic Platform for Education. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 6–8 January 2022; pp. 1–6. [Google Scholar]
- Makey Makey Home Page. Available online: http://bit.ly/placa-makey-makey (accessed on 19 November 2022).
- Tengler, K.; Sabitzer, B.; Kastner-Hauler, O. First Programming with Ozobots-A Creative Approach to Early Computer Science In Primary Education. In Proceedings of the INTED2020 Conference, Valencia, Spain, 2–4 March 2020; pp. 5156–5163. [Google Scholar]
- Tengler, K.; Sabitzer, B.; Kastner-Hauler, O. Enhancing Computational Thinking Skills using Robots and Digital Storytelling. In Proceedings of the 13th International Conference on Computer Supported Education (CSEDU 2021), Online, 23–25 April 2021; Volume 1, pp. 157–164. [Google Scholar] [CrossRef]
- Özgür1, A.; Lemaignan, S.; Johal, W.; Beltran, M.; Briod, M.; Pereyre, L.; Mondada, F.; Dillenbourg, P. Cellulo: Versatile Handheld Robots for Education. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, HRI ’17, Vienna, Austria, 6–9 March 2017; pp. 119–127. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Gomez, J.; Valero-Gomez, A.; Prieto-Moreno, A.; Abderrahim, M. A New Open Source 3D-printable Mobile Robotic Platform for Education. In Proceedings of the 6th International Symposium on Autonomous Minirobots for Research and Edutainment, Bielefeld, Germany, 23–25 May 2011; pp. 23–25. [Google Scholar]
- MakerBot Thingiverse Home Page. Available online: https://www.thingiverse.com/ (accessed on 19 November 2022).
- GitHub Home Page. Available online: https://github.com (accessed on 19 November 2022).
- MakerBot Thingiverse Otto DIY+ Home Page. Available online: https://www.thingiverse.com/thing:2398231 (accessed on 19 November 2022).
- Meirinhos, C.; Fernandes, L. Tangible Objects in ESL Classroom: Impact in Learning at Primary School Level. In Hands-On Science: Education Activities—Challenges and Opportunities of Distant and Online Teaching and Learning; Costa, M.F., Dorrío, B.V., Eds.; Hands-On Science Network: Braga, Portugal, 2021; p. 232. [Google Scholar]
- Otto Builders Home Page. Available online: https://builders.ottodiy.com/ (accessed on 19 November 2022).
- Ottodiy Home Page. Available online: https://www.ottodiy.com/ (accessed on 19 November 2022).
- Ottodiy Games Home Page. Available online: https://www.ottodiy.com/games (accessed on 19 November 2022).
- GitHub Fossbot Home Page. Available online: https://github.com/eellak/fossbot (accessed on 19 November 2022).
- EELLAK Home Page. Available online: https://openhardware.ellak.gr/wp-content/uploads/sites/13/2022/04/front_unc.png (accessed on 19 November 2022).
- Chronis, C.; Varlamis, I. FOSSBot: An Open Source and Open Design Educational Robot. Electronics 2022, 11, 2606. [Google Scholar] [CrossRef]
- Lee, Y.D.; Chung, J.I. The effects of middle school mathematical statistics area and Python programming STEAM instruction on problem solving ability and curriculum interest. J. Korea Acad.-Ind. Coop. Soc. 2019, 20, 336–344. [Google Scholar]
- Svistkov, A.I.; Sutchenkov, A.A.; Tikhonov, A.I. STEM and STEAM Technologies in Problem Solving with Python. In Proceedings of the 3rd International Youth Conference on Radio Electronics, Electrical and Power Engineering (REEPE), Moscow, Russia, 1 April 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Iwamoto, T.; Matsumoto, S. Development of Web-Based Programming Learning Support System with Graph Drawing of Mathematics as a Learning Task. In Proceedings of the 2019 8th International Congress on Advanced Applied Informatics (IIAI-AAI), Toyama, Japan, 7–11 July 2019; pp. 302–305. [Google Scholar] [CrossRef]
- Tumlin, N. Teacher Configurable Coding Challenges for Block Languages. In Proceedings of the 2017 ACM SIGCSE Technical Symposium on Computer Science Education, SIGCSE ’17, Seattle, WA, USA, 8–11 March 2017; ACM Publications: New York, NY, USA; pp. 783–784. [Google Scholar]
- Scratch Home Page. Available online: https://scratch.mit.edu/ (accessed on 19 November 2022).
- De la Hoz Serrano, A.; Cañada Cañada, F.; Melo Niño, L.V.; Álvarez Murillo, A.; Cubero Juánez, J. Design of a robotic board for teaching the Water Cycle. In Proceedings of the 14th International Conference on Education and New Learning Technologies, Palma, Spain, 4–6 July 2022; pp. 2990–2993. [Google Scholar]
- Fidai, A.; Capraro, M.M.; Capraro, R.M. “Scratch”-ing computational thinking with Arduino: A meta-analysis. Think. Ski. Creat. 2020, 38, 100726. [Google Scholar] [CrossRef]
- Lee, Y.D.; Kim, S.I.; Seo, Y.H.; Kang, J.J. A Study on the Robot Education Based on Scratch. J. Converg. Cult. Technol. 2016, 2, 29–35. [Google Scholar] [CrossRef] [Green Version]
- Korkmaz, O. The Effect of Scratch- and Lego Mindstorms Ev3-Based Programming Activities on Academic Achievement, Problem-Solving Skills and Logical-Mathematical Thinking Skills of Students. Malays. Online J. Educ. Sci. 2016, 4, 73–88. [Google Scholar]
- Michalopoulos, P.; Mpania, S.; Karatrantou, A.; Panagiotakopoulos, C. Introducing STEM to primary education students with Arduino and S4A. In Innovating STEM Education: Increased Engagement and Best Practices; Koleza, E., Panagiotakopoulos, C., Skordoulis, C., Eds.; Common Ground Research Networks: Champaign, IL, USA, 2022; pp. 77–87. [Google Scholar]
- Pou, A.V.; Canaleta, X.; Fonseca, D. Computational Thinking and Educational Robotics Integrated into Project-Based Learning. Sensors 2022, 22, 3746. [Google Scholar] [CrossRef]
- Xefteris, S. Developing STEAM Educational Scenarios in Pedagogical Studies using Robotics. Eng. Technol. Appl. Sci. Res. 2021, 11, 7358–7362. [Google Scholar] [CrossRef]
- Maloney, J.; Resnick, M.; Rusk, N.; Silverman, B. The scratch programming language and environment. ACM Trans. Comput. Educ. 2010, 10, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Meerbaum-Salant, O.; Haberman, B.; Pollack, S. “Computer Science, Academia and Industry” as pedagogical model to enhance Computational thinking. In Proceedings of the 2015 ACM Conference on Innovation and Technology in Computer Science Education, ITiCSE ’15, Vilnius, Lithuania, 4–8 July 2015; p. 341. [Google Scholar] [CrossRef]
- Monroy-Hernández, A. ScratchR: Sharing user-generated programmable media. In Proceedings of the 6th International Conference on Interaction Design and Children, IDC ’07, Aalborg, Denmark, 6–8 June 2007; pp. 167–168. [Google Scholar] [CrossRef] [Green Version]
- Anastasaki, E.; Vassilakis, K. Experimental commands development for LEGO WeDo 2.0 in Python language for STEAM robotics advanced classes. Adv. Mob. Learn. Educ. Res. 2022, 2, 443–454. [Google Scholar] [CrossRef]
- GitHub Google Blockly Home Page. Available online: https://github.com/google/blockly (accessed on 19 November 2022).
- Shih, W.C. Mining Learners’ Behavioral Sequential Patterns in a Blockly Visual Programming Educational Game. In Proceedings of the 2017 International Conference on Industrial Engineering, Management Science and Applicationa (ICIMSA), Seoul, Republic of Korea, 13–15 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–2. [Google Scholar]
- Snap Home Page. Available online: https://snap.berkeley.edu/snap/snap.html (accessed on 19 November 2022).
- Snap! Education Home Page. Available online: https://snapeducation.weebly.com/eta-pirhoomegataueta-epsilonpialphaphieta-muepsilon-tauomicron-snap.html (accessed on 19 November 2022).
- Newley, A.; Deniz, H.; Kaya, E.; Yesilyurt, E. Engaging Elementary and Middle School Students in Robotics through Hummingbird Kit with Snap! Visual Programming Language. J. Learn. Teach. Digit. Age 2016, 1, 20–26. [Google Scholar]
- Abueita, J.D.; Al Fayez, M.Q.; Alsabeelah, A.; Humaidat, M.A. The Impact of (STEAM) Approach on the Innovative Thinking and Academic Achievement of the Educational Robot Subject among Eighth Grade Students in Jordan. J. Educ. Soc. Res. 2022, 12, 188. [Google Scholar] [CrossRef]
- Choi, J.H.; Choi, H.M.; Park, J. Development and Application of STEAM Education Program Using the Lego Mindstorms Robot. J. Sci. Educ. 2018, 42, 1–11. [Google Scholar] [CrossRef]
- Matyushchenko, I.; Zvereva, E.; Lavina, T. Development of Algorithmic Thinking by Means of Lego Mindstorms Ev3 on Robotics. In Proceedings of the Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT), Yekaterinburg, Russia, 14–15 May 2020. [Google Scholar] [CrossRef]
- Samara, E.; Angelidis, A.; Kotsiari, A.; Kilintzis, P.; Avlogiaris, G. Robotics in Primary and Secondary Education—The Lego Mindstorms EV3 implementation. In Proceedings of the 6th South-East Europe Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Preveza, Greece, 24–26 September 2021. [Google Scholar]
- Valls, A. Computational Thinking and Educational Robotics Integrated into Project-Based Learning; Research Square: Durham, NC, USA, 2022. [Google Scholar] [CrossRef]
- Caliskan, E. The effects of robotics programming on secondary school students’ problem-solving skills. World J. Educ. Technol. Curr. Issues 2020, 2, 217–230. [Google Scholar] [CrossRef]
- Doddo, M.; Hsieh, S.J. Board# 121: MAKER: A Study of Multi-Robot Systems Recreated for High School Students. In Proceedings of the 2017 ASEE Annual Conference & Exposition, Columbus, OH, USA, 25–28 June 2017. [Google Scholar] [CrossRef]
- Guzzi, J.; Giusti, A.; Di Caro, G.; Gambardella, L. Mighty Thymio for University-Level Educational Robotics. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. Available online: https://ojs.aaai.org/index.php/AAAI/article/view/11402 (accessed on 19 November 2022).
- Mondada, F.; Bonani, M.; Riedo, F.; Briod, M.; Pereyre, L.; Rétornaz, P.; Magnenat, S. Bringing robotics to formal education: The thymio open-source hardware robot. IEEE Robot. Autom. Mag. 2017, 24, 77–85. [Google Scholar] [CrossRef] [Green Version]
- Mussati, A.; Giang, C.; Piatti, A.; Mondada, F. A Tangible Programming Language for the Educational Robot Thymio. In Proceedings of the 10th International Conference on Information, Intelligence, Systems, and Applications (IISA), Patras, Greece, 15–17 July 2019. [Google Scholar] [CrossRef]
- Vitanza, A.; Rossetti, P.; Mondada, F.; Trianni, V. Robot swarms as an educational tool: The Thymio’s way. Int. J. Adv. Robot. Syst. 2019, 16, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Efstratiou, R.; Karatsioras, C.; Papadopoulou, M.; Papadopoulou, C.; Lytridis, C.; Bazinas, C.; Papakostas, G.A.; Kaburlasos, V.G. Teaching Daily Life Skills in Autism Spectrum Disorder (ASD) Interventions Using the Social Robot Pepper. In Robotics in Education: Methodologies and Technologies; Lepuschitz, W., Merdan, M., Koppensteiner, G., Balogh, R., Obdržálek, D., Eds.; Springer International Publishing: Cham, Germany, 2020; pp. 86–97. [Google Scholar]
- Guggemos, J.; Seufert, S.; Sonderegger, S. Humanoid robots in higher education: Evaluating the acceptance of Pepper in the context of an academic writing course using the UTAUT. Br. J. Educ. Technol. 2020, 51, 1864–1883. [Google Scholar] [CrossRef]
- Lee, Y.J.; Wyatt, A.; Dong, J.; Upthegrove, T.; Hale, B. Robot Musical Theater for Climiate Change Education. In Proceedings of the 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Sapporo, Japan, 7–10 March 2022; pp. 870–874. [Google Scholar]
- Ko, S.; Swaim, H.; Sanghavi, H.; Dong, J.; Nadri, C.; Jeon, M. Robot-theater programs for different age groups to promote STEAM education and robotics research. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, MA, USA, 23–26 March 2020; pp. 299–301. [Google Scholar]
- Konijn, E.A.; Hoorn, J.F. Robot tutor and pupils’ educational ability: Teaching the times tables. Comput. Educ. 2020, 157, 103970. [Google Scholar] [CrossRef]
- Lopez-Caudana, E.; Rodríguez-Abitia, J.; Martínez-Pérez, S.; Anton-Ares, P.; Ramírez-Montoya, M.S. Scenarios of the use of robotics as a support tool for teaching. In Proceedings of the TEEM’21: Ninth International Conference on Technological Ecosystems for Enhancing Multiculturality (TEEM’21), Barcelona, Spain, 26–29 October 2021; pp. 38–43. [Google Scholar]
- Jeon, M.; FakhrHosseini, M.; Barnes, J.; Duford, Z.; Zhang, R. Making live theatre with multiple robots as actors bringing robots to rural schools to promote STEAM education for underserved students. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 445–446. [Google Scholar]
- Papadakis, S.; Kalogiannakis, M. Learning Computational Thinking Development in Young Children with Bee-Bot Educational Robotics. In Research Anthology on Computational Thinking, Programming, and Robotics in the Classroom; IGI Global: Hershey, PA, USA, 2022; pp. 926–947. [Google Scholar] [CrossRef]
- Mondada, F.; Bonani, M.; Raemy, X.; Pugh, J.; Cianci, C.; Klaptocz, A.; Magnenat, S.; Zufferey, J.C.; Floreano, D.; Martinoli, A. The e-puck, a Robot Designed for Education in Engineering. In Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, 7 May 2009; pp. 59–65. [Google Scholar]
- Olivier, M. Webots: Professional Mobile Robot Simulation. Int. J. Adv. Robot. Syst. 2004, 1, 39–42. [Google Scholar]
- Trifa, V.M.; Cianci, C.M.; Guinard, D. Dynamic Control of a Robotic Swarm using a Service-Oriented Architecture. In Proceedings of the 13th International Symposium on Artificial Life and Robotics (AROB 2008), Oita, Japan, 31 January–2 February 2008. [Google Scholar]
- Sáez-López, M.J.; Sevillano-García, M.L. The effect of programming on primary school students’ mathematical and scientific understanding: Educational use of mBot. Educ. Technol. Res. Dev. 2019, 67, 1405–1425. [Google Scholar] [CrossRef]
- Khodr, H.; Brender, J.; Kothiyal, A.; Dillenbourg, P. How Diseases Spread: Embodied Learning of Emergence with Cellulo Robots. In Proceedings of the 29th International Conference on Computers in Education, Taoyuan City, Taiwan, 22–26 November 2021; Rodrigo, M.M.T., Iyer, S., Mitrovic, A., Eds.; Asia-Pacific Society for Computers in Education: Taoyuan City, Taiwan, 2021. [Google Scholar]
- Petrovič, P.; Vaško, J. An Open Solution for a Low-Cost Educational Toy. In Proceedings of the 10th International Conference on Robotics in Education, Vienna, Austria, 10–12 April 2019; Merdan, M., Lepuschitz, W., Koppensteiner, G., Balogh, R., Eds.; Springer: Cham, Germany, 2020; pp. 196–208. [Google Scholar]
- Tiao Hsieh, C. Developing programmable robot for K12 STEAM education. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1113, 012008. [Google Scholar] [CrossRef]
- Vega, J.; Canas, J.M. PiBot: An Open Low-Cost Robotic Platform with Camera for STEM Education. Electronics 2018, 7, 430. [Google Scholar] [CrossRef] [Green Version]
- Hirst, A.J.; Johnson, J.; Petre, M.; Price, B.A.; Richards, M. What is the best programming environment/language for teaching robotics using Lego Mindstorms? Artif. Life Robot. 2013, 7, 124–131. [Google Scholar] [CrossRef]
- García-Saura, C.; González-Gómez, J. Low cost education platform for robotics, using open-source 3D printers and open-source hardware. In Proceedings of the ICERI2012 Conference, Madrid, Spain, 19–21 November 2012; pp. 2699–2706. [Google Scholar]
Figure 1.
(a) Lego Mindstorms EV3; (b) Edison Robot V2; (c) Vex IQ Robotics (d) Thymio.
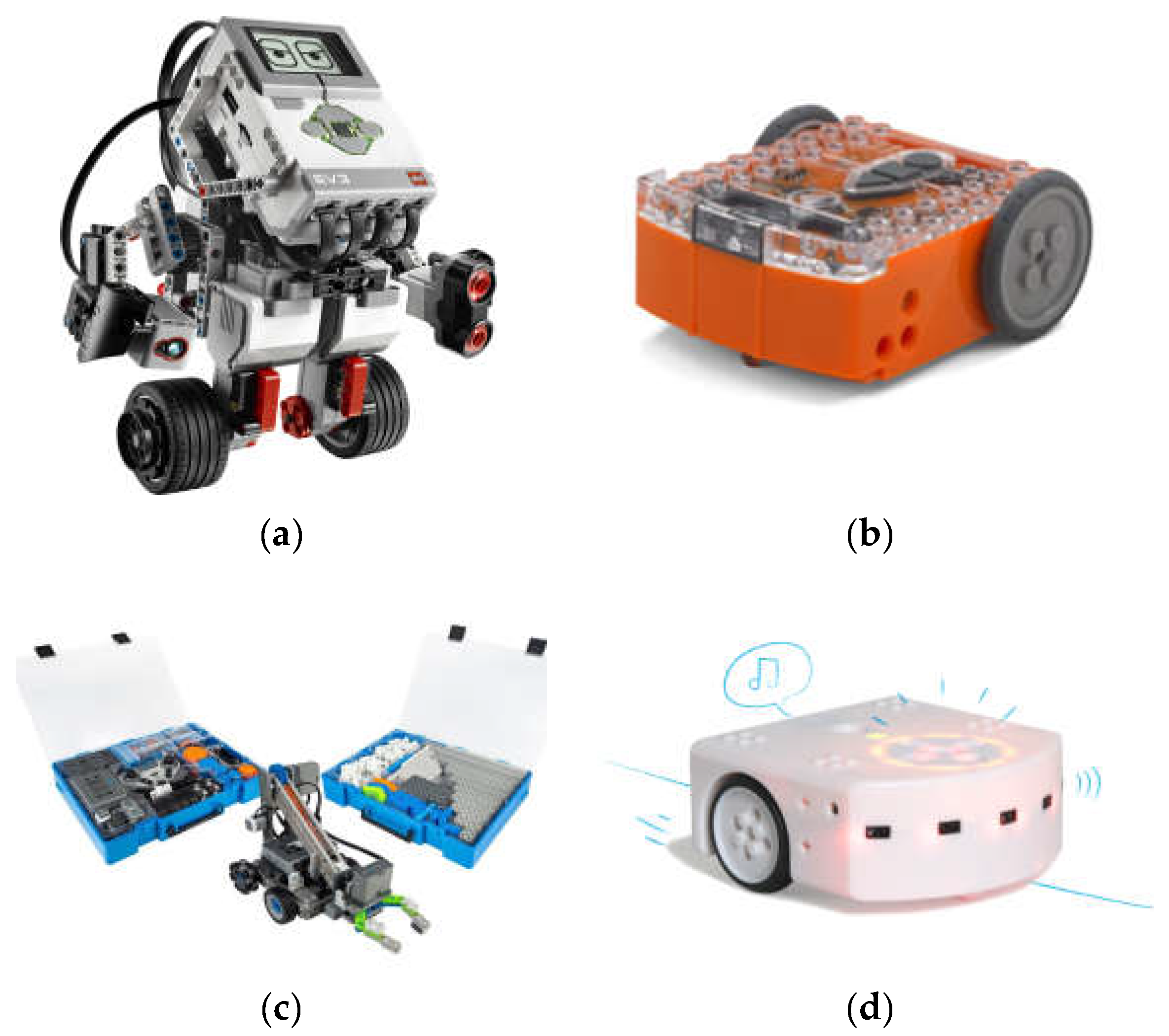
Figure 2.
(a) Pepper robot; (b) NAO robot; (c) Beebot robot; (d) mBot robot.
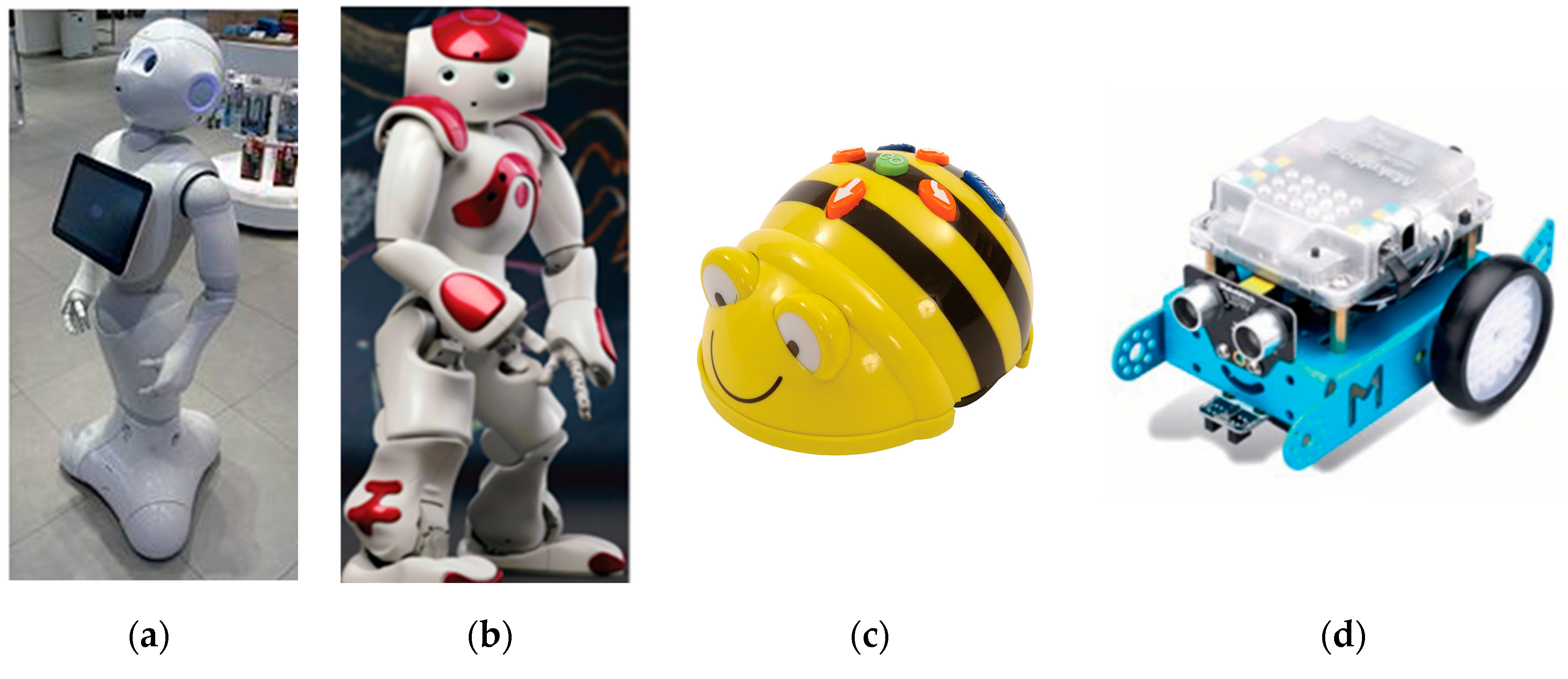
Figure 3.
(a) Ozobot; (b) programming Ozobot (left) (Source: adapted from [53]) and storytelling with Ozobot (right) (Source: adapted from [54]); (c) Cellulo.

Figure 4.
(a) Otto DIY+ Arduino Robot; (b) Otto robot programming software; (c) The FOSSbot.
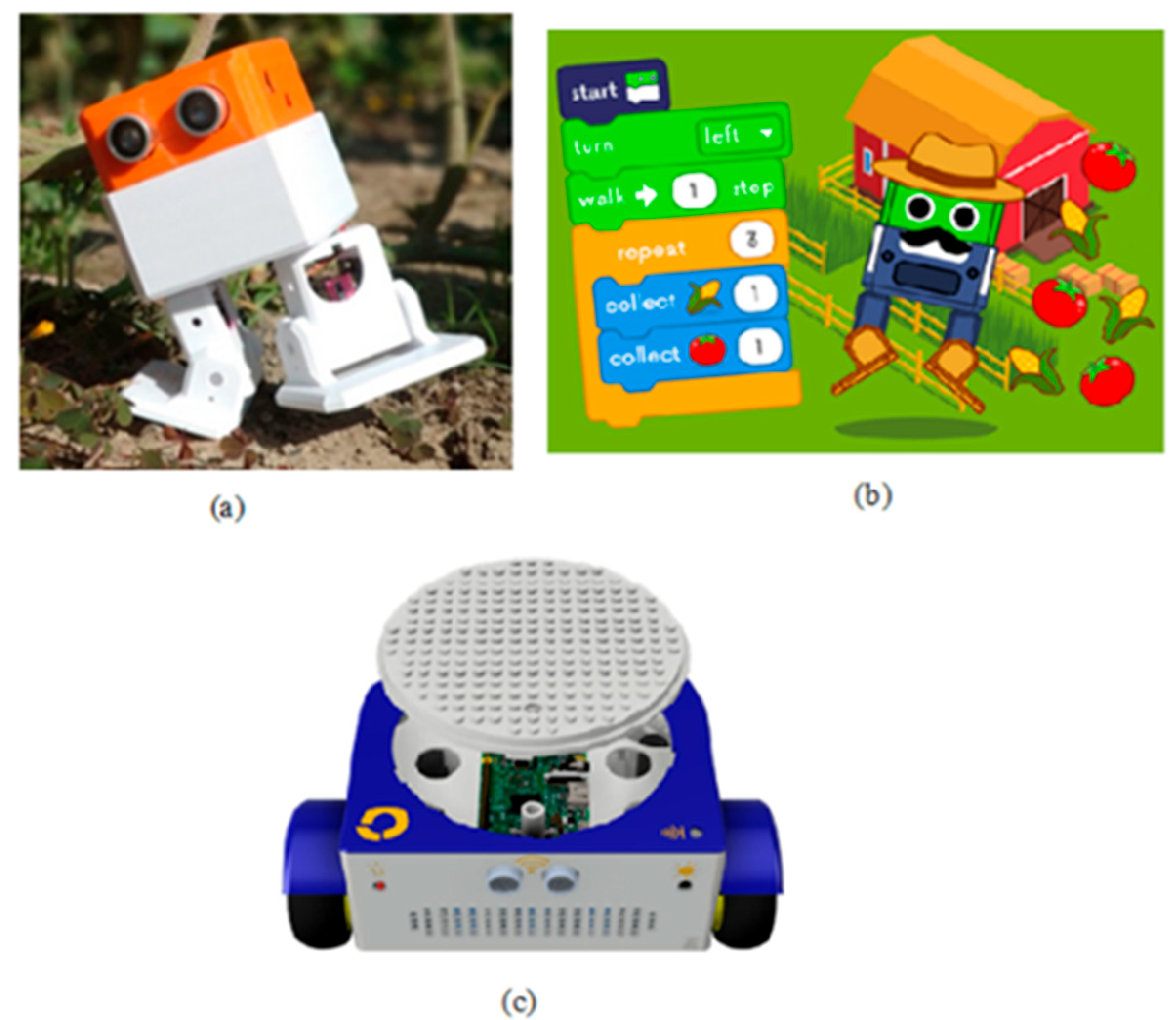
Figure 5.
Scratch Language.

Figure 6.
Instruction in the Blockly Programming Language.

Figure 7.
Online Snap Programming Language.

Figure 8.
Cost (EUR) of robots.

Figure 9.
Frequency of use of robots in recent years, in STEAM education.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Classification of the most frequently used robots in the last years (2016–2022).
| Robot | Manufacturer | Frequency of Use—Surveys that Have Been Used | Features–Flexibility Platform | Sensors | Software—Programming Language | Connection | Suggested Age | Usefulness in Education | Cost |
|---|---|---|---|---|---|---|---|---|---|
| Lego Mindstorms EV3 | Lego | 7 [69,75,88,89,90,91,92] | Package with construction materials (bricks, gears, pulleys, and shafts). Modular platform | color, speech, touch, infrared (IR), engines, gyroscope | EV 3 Software | USB, Wi-Fi, Bluetooth | High school | For teaching programming and developing algorithmic thinking. | 450 EUR (H) |
| Vex IQ Robotics | Innovation First International | 2 [93,94] | Modular platform which can be controlled from a distance. | speech, touch, color, distance, engines, gyroscope | Robotc, Modcit Visual programming | USB, Bluetooth Wireless Communication | Secondary education | Allows students to perform traditional-style programming. | 400 EUR (H) |
| Edison Robot V2 | Meetedison | 1 [30] | Movable and flexible learning platform with notches for Lego bricks and two motors with variable speed. It has a remote control and also avoids obstacles. | light, line, sound, infrared | EdBlocks, EdScratch EdPy | USB, cable with a headphone plug | Mainly large primary school classes, but can also be used by ages 4+ | Develops students’ creativity as they expand it with bricks. Children easily learn programming in a short time by playing. | 60 EUR (L) |
| Thymio | EPFL | 4 [95,96,97,98] | Small and flexible, fully assembled, mobile robot that can and does change color. It has a remote control and also avoids obstacles. | line, infrared, distance, angle, temperature, inclinometer and tilt sensor | Aseba (open- source), VPL, Scratch, Blockly | USB, Wi-Fi, Bluetooth | For all levels of education | Promotes social skills, collaboration skills, etc. | 152 EUR (M) |
| Pepper | Aldebaran Robotics in collaboration with Softbank Mobile | 4 [99,100,101,102] | A humanoid robot with a 1.2 m height and 28 kg, can be programmed to speak 15 languages. It is equipped with a fully functional tablet. It has LEDs. | touch, infrared, microphones, bumpers, radar for autonomous navigation, inertial unit, 2D and 3D cameras | open and fully programmable platform | University | Responds to human emotions and promotes the Inclusion of students with special educational needs. | 13,600 EUR (H) | |
| NAO | SoftBankRobotics | 7 [12,38,101,102,103,104,105] | Humanoid robot, size 58 cm, weighs no more than 5 kg, speaks, hears, sees, and relates to the environment. It has a voice synthesizer and two speakers. | two cameras, four microphones, nine touch sensors, two ultrasonic sensors, eight pressure sensors, an accelerometer, and a gyroscope | C, C++, Matlab, Java, Python, Urbi, Net, Choregraphe | Ethernet, Wi-Fi | University | Its visual and intuitive interface facilitates the content creation process, allowing for individualized teaching activities either on an individual basis or in small groups. | 12,300 EUR (H) |
| Beebot | Learning Resources | 6 [8,44,45,46,47,106] | Bee-shaped and mouse-shaped robots, respectively. | touch, sound, light | At the top, it has buttons for its programming. (Directional intuitive language via buttons) | USB | Kindergarten | They develop working memory, spatial awareness, and problem-solving ability. | 100 EUR (M) |
| e-puck | EPFL | 3 [107,108,109] | Small, Moving, Flexible. | sound, sight, proximity, accelerometer, 3 microphones, color camera | Built-in open-source software | Bluetooth | For all levels of education | Suitable for teaching signal processing, automatic control, distributed intelligent systems, position estimation, and finding a path for a moving robot. | 250 EUR (M) |
| mBot | Makeblock | 3 [8,49,110] | It is based on Arduino and is a small mobile robot, with many possible expansion options. | line detection, infrared | mBlock | Bluetooth, Wi-Fi | Large primary school classes | It enables children to get started in robotics, programming, and electronics. | 100 EUR (M) |
| Ozobot | University College for Teacher Education in Lower Austria | 2 [8,53] | Small moving sphere 2.5 cm wide. | color | Ozoblockly Programming with color codes | Primary education | A variety of games can be designed such as racetracks, puzzles, mazes, etc., to teach programming with a playful character. | 100 EUR (M) | |
| Cellulo | CHILI lab, EPFL | 2 [55,111] | It interacts with paper, is flexible, and is affordable. It has LED effects and it can move autonomously. | touch | QtQuick | Bluetooth | Elementary and high school | Various concepts that can be approached are atmospheric pressure, force, the Cartesian plane, and the motion of the planets, molecules, and atoms. | 125 EUR (M) |
| Otto DIY + | Homemade | 3 [59,112,113] | It is based on the Arduino platform and is designed with printable materials. It is scalable, modular, and flexible.It walks, dances and avoids obstacles. | ultrasound, touch | Arduino, Otto Blockly | USB Wi-Fi Bluetooth | Large primary school classes | Allows users to develop knowledge on various STEM topics. | 45 EUR (L) |
| FOSSbot | EELLAK, Harokopio University | 1 [66] | Printable, moving, and agile robot, speaks, writes with a marker, and is compatible with Lego bricks. Raspberry Pi. | distance, battery sensor, accelerometer, gyroscope, odometry sensor, infrared receiver, line detection, light | Python, Google Blockly | WI-FI | Primary and secondary education | Adapts to a variety of educational activities. | cost of materials 190 EUR (M) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Kalaitzidou, M.; Pachidis, T.P. Recent Robots in STEAM Education. Educ. Sci. 2023, 13, 272. https://doi.org/10.3390/educsci13030272
AMA Style
Kalaitzidou M, Pachidis TP. Recent Robots in STEAM Education. Education Sciences. 2023; 13(3):272. https://doi.org/10.3390/educsci13030272
Chicago/Turabian StyleKalaitzidou, Magdalini, and Theodore P. Pachidis. 2023. "Recent Robots in STEAM Education" Education Sciences 13, no. 3: 272. https://doi.org/10.3390/educsci13030272
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.