
Hand–Eye Calibration Using a Tablet Computer


Abstract
:1. Introduction
2. Related Works
3. Proposed Method
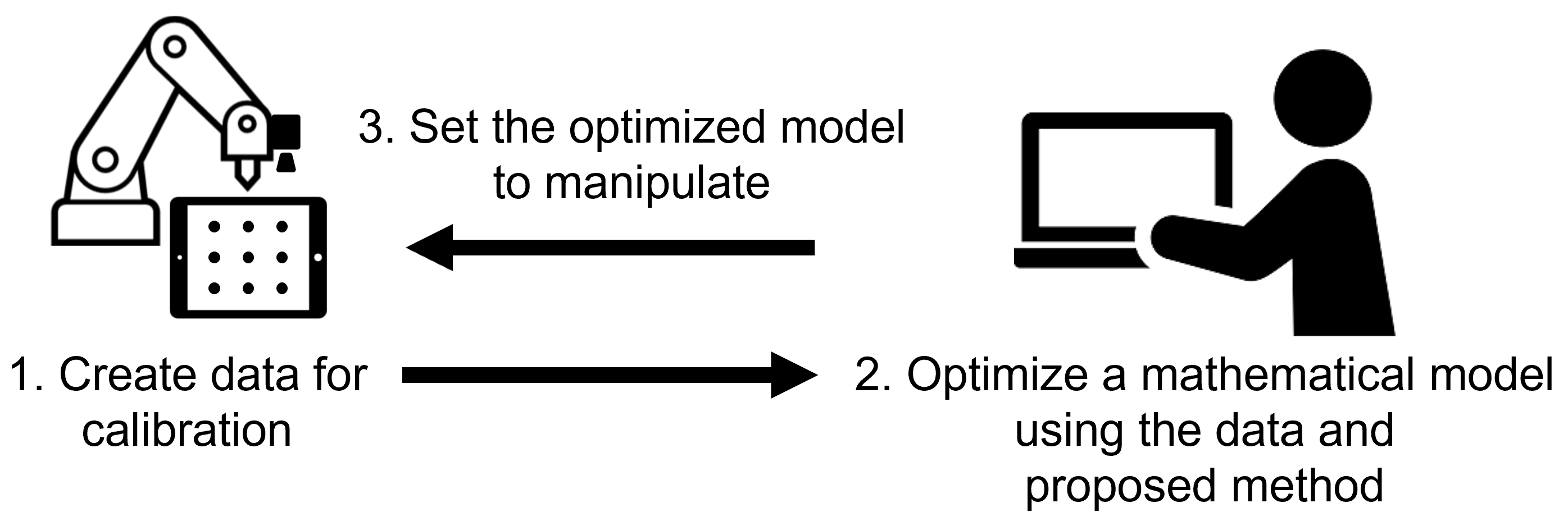
3.1. Overview
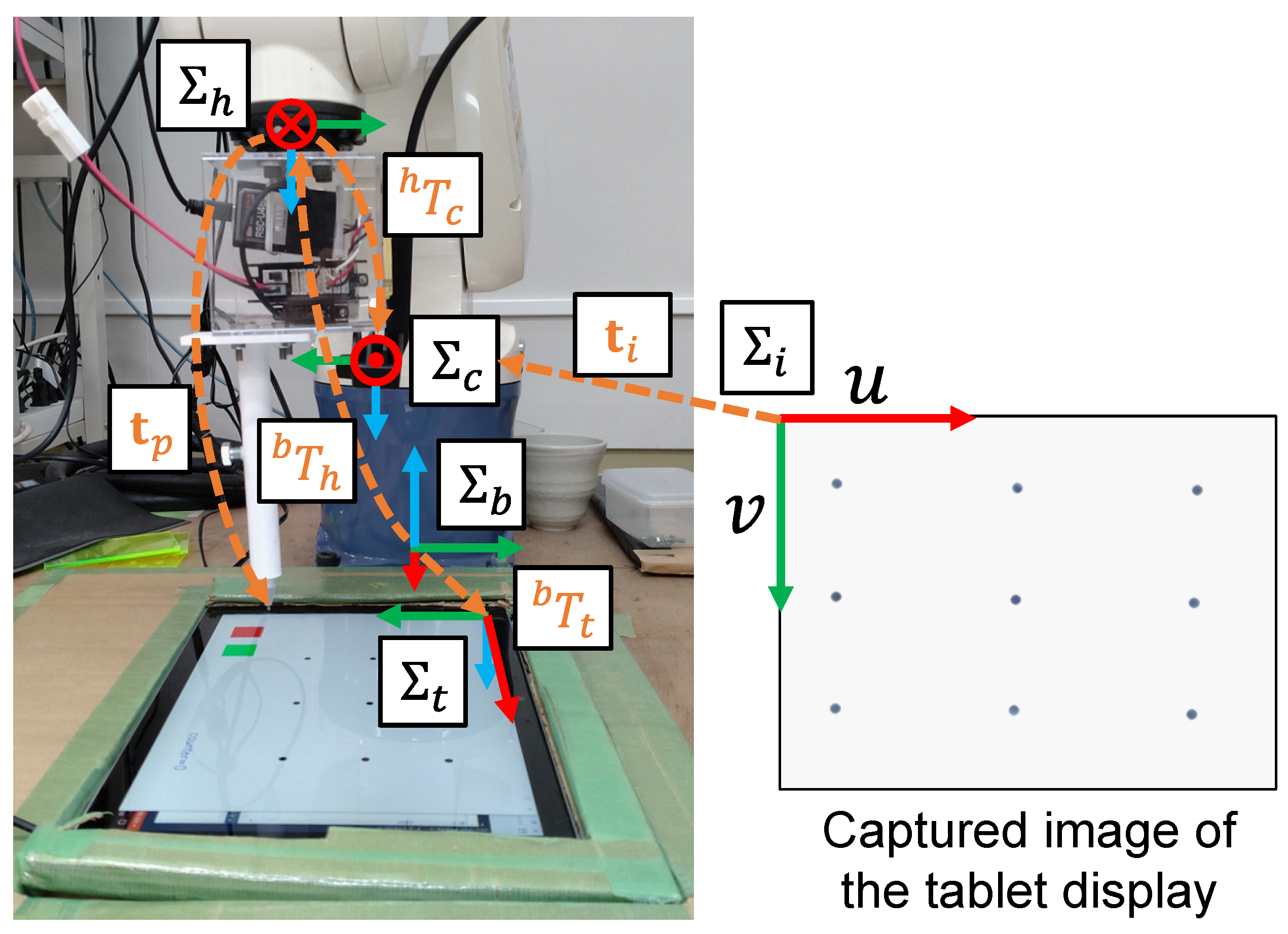
3.2. Coordinate System and Homogeneous Transformation Matrix (HTM)
3.3. Transformation from to
3.4. Representation by DH Method
3.5. Parameters to Be Optimized
3.6. Two-Stage Optimization
3.6.1. First Optimization
3.6.2. Second Optimization
4. Experiment
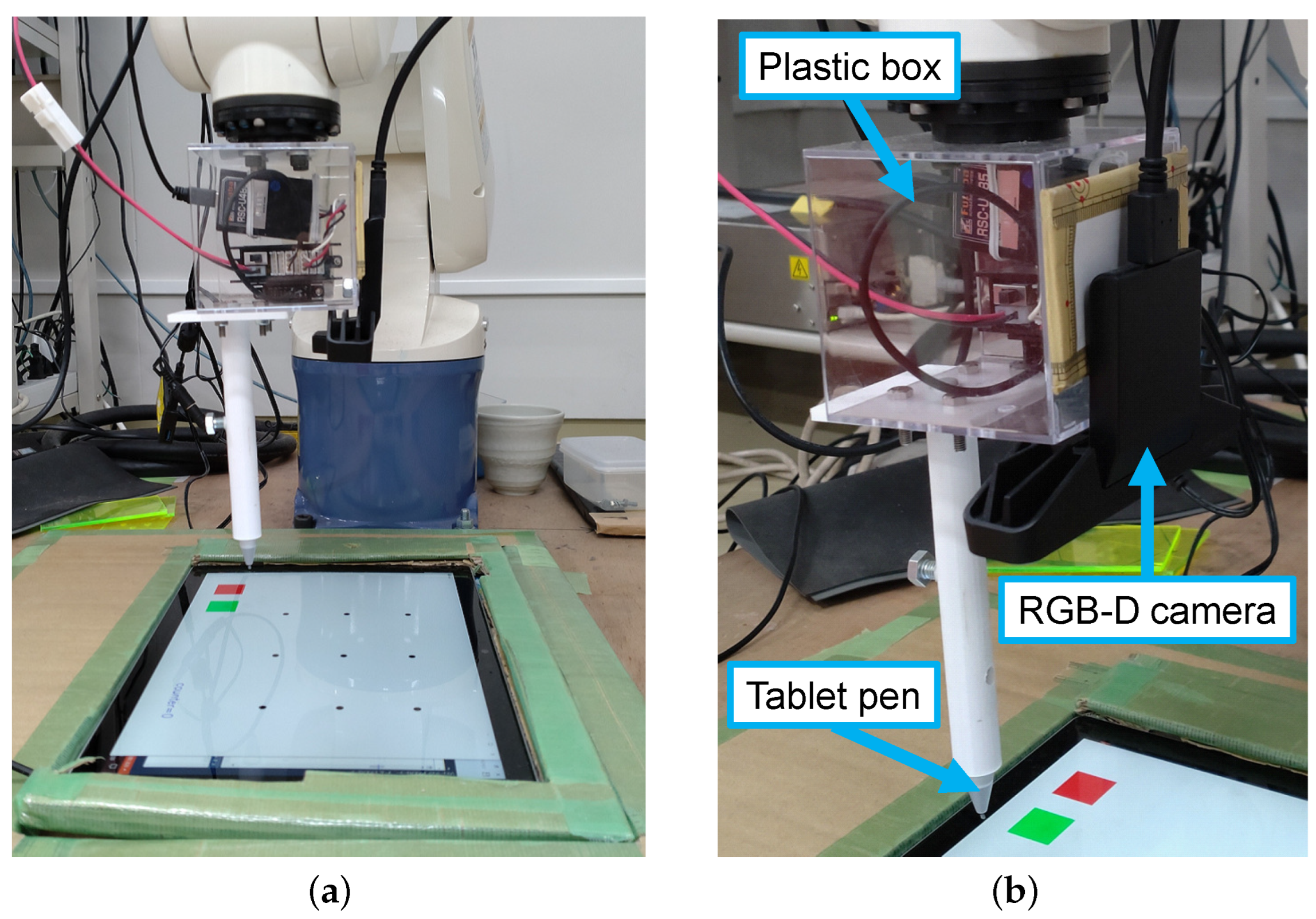
4.1. Used Robot and Devices
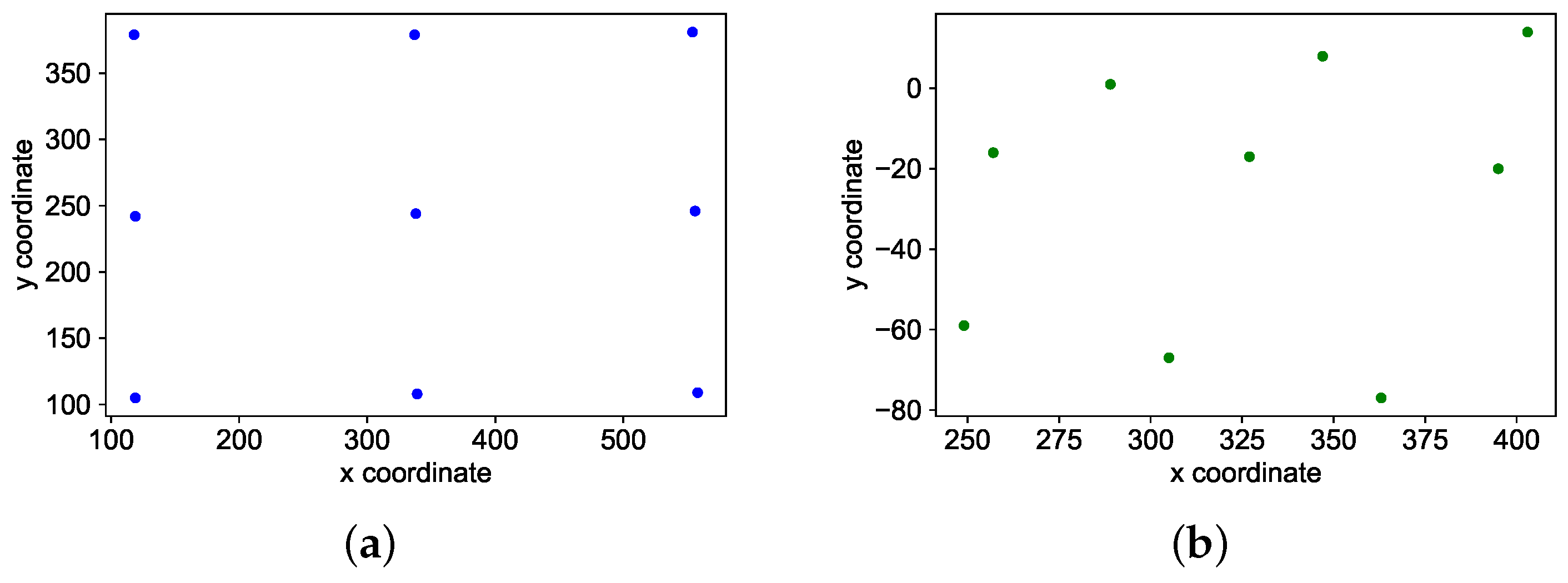
4.2. Data Creation
4.3. Set Values for Known Parameters
4.4. Setup for DE
5. Results and Consideration
5.1. First-Stage Optimization
5.2. Second-Stage Optimization
6. Conclusions
Funding
Conflicts of Interest
References
- Lin, W.; Liang, P.; Luo, G.; Zhao, Z.; Zhang, C. Research of Online Hand-Eye Calibration Method Based on ChArUco Board. Sensors 2022, 119, 3805. [Google Scholar]
- Hua, J.; Zeng, L. Hand-Eye Calibration Algorithm Based on an Optimized Neural Network. Actuators 2021, 10, 85. [Google Scholar] [CrossRef]
- Enebuse, I.; Foo, M.; Ibrahim, B.S.K.K.; Ahmed, H.; Supmak, F.; Eyobu, O.S. A Comparative Review of Hand-Eye Calibration Techniques for Vision Guided Robots. IEEE Access 2021, 9, 113143–113155. [Google Scholar] [CrossRef]
- Jiang, J.; Luo, X.; Luo, Q.; Qiao, L.; Li, M. An Overview of Hand-Eye Calibration. Int. J. Adv. Manuf. Technol. 2022, 22, 77–97. [Google Scholar]
- Shiu, Y.C.; Ahmad, S. Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the form AX = XB. IEEE Trans. Robot. Autom. 1989, 5, 16–29. [Google Scholar]
- Motai, Y.; Kosaka, A. Hand-Eye Calibration Applied to Viewpoint Selection for Robotic Vision. IEEE Trans. Ind. Electron. 2008, 55, 3731–3741. [Google Scholar]
- Tsai, R.Y.; Lenz, R.K. A new technique for fully autonomous and efficient 3D robotics hand/eye calibration. IEEE Trans. Robot. Autom. 1989, 5, 345–358. [Google Scholar]
- Wang, C.C. Extrinsic calibration of a vision sensor mounted on a robot. IEEE Trans. Robot. Autom. 1992, 8, 161–175. [Google Scholar]
- Park, F.C.; Martin, B.J. Robot sensor calibration: Solving AX = XB on the Euclidean group. IEEE Trans. Robot. Autom. 1994, 10, 717–721. [Google Scholar] [CrossRef]
- Ma, S.D. A self-calibration technique for active vision systems. IEEE Trans. Robot. Autom. 1996, 12, 114–120. [Google Scholar]
- Daniilidis, K. Hand-Eye Calibration Using Dual Quaternions. Int. J. Robot. Res. 1999, 18, 286–298. [Google Scholar]
- Horaud, R.; Dornaika, F. Hand-Eye Calibration. Int. J. Robot. Res. 1995, 14, 195–210. [Google Scholar] [CrossRef]
- Andreff, N.; Horaud, R.; Espiau, B. Robot Hand-Eye Calibration using Structure from Motion. Int. J. Robot. Res. 2001, 20, 228–248. [Google Scholar]
- Zhao, Z. Hand-eye calibration using convex optimization. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2947–2952. [Google Scholar]
- Heller, J.; Havlena, M.; Pajdla, T. Globally Optimal Hand-Eye Calibration Using Branch-and-Bound. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1027–1033. [Google Scholar] [PubMed]
- Zhuang, H.; Roth, Z.; Sudhakar, R. Simultaneous robot/world and tool/flange calibration by solving homogeneous transformation equations of the form AX = YB. IEEE Trans. Robot. Autom. 1994, 10, 549–554. [Google Scholar] [CrossRef]
- Mišeikis, J.; Glatte, K.; Elle, O.J.; Torresen, J. Automatic Calibration of a Robot Manipulator and Multi 3D Camera System. In Proceedings of the IEEE/SICE International Symposium on System Integration, Sapporo, Japan, 13–15 December 2016; pp. 735–741. [Google Scholar]
- Koide, K.; Menegatti, E. General Hand-Eye Calibration Based on Reprojection Error Minimization. IEEE Robot. Autom. Lett. 2019, 4, 1021–1028. [Google Scholar] [CrossRef]
- Projection in Intel RealSense SDK 2.0. Available online: https://dev.intelrealsense.com/docs/projection-in-intel-realsense-sdk-20 (accessed on 19 January 2023).
- DENSO ROBOT USER MANUALS. Available online: http://eidtech.dyndns-at-work.com/support/RC8_Manual/005929.html (accessed on 19 January 2023).
- Lynch, K.M.; Park, F.C. Modern Robotics: Mechanics, Planning, and Control; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Das, S.; Suganthan, P.N. Differential Evolution: A Survey of the State-of-the-Art. IEEE Trans. Evol. Comput. 2011, 15, 4–31. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equation Number | Known | Unknown (Six-DoF HTM) | Unknown (DH Method) |
|---|---|---|---|
| (1) | |||
| (2) | , , , | ||
| (3) | , , , , | ||
| (6) | , | , | |
| (11) | , , , , | ||
| (13) | , , | ||
| (14) | , | ||
| (15) | , , | ||
| (16) | , |
| m | in [px] | in [mm] | in [mm] | in [px] |
|---|---|---|---|---|
| 0 | (119, 105) | 168.2 | (289, 1) | (−3, 1) |
| 1 | (339, 108) | 168.6 | (347, 8) | (−2, 3) |
| 2 | (558, 109) | 167.7 | (403, 14) | (−1, 5) |
| 3 | (556, 246) | 167.5 | (395, −20) | (−1, 4) |
| 4 | (338, 244) | 169.2 | (327, −17) | (−3, −1) |
| 5 | (119, 242) | 168.7 | (257, −16) | (3, 3) |
| 6 | (118, 379) | 168.6 | (249, −59) | (2, 0) |
| 7 | (337, 379) | 170.2 | (305, −67) | (−1, 3) |
| 8 | (554, 381) | 168.9 | (363, −77) | (1, 2) |
| Parameter | Value |
|---|---|
| (320, −70, 290) | |
| (617.7, 617.7) | |
| (316.5, 242.3) | |
| Hyperparameter | Value |
|---|---|
| N | 10,000 |
| G | 10,000 |
| CR | 0.9 |
| F | 0.5 |
| Crossover strategy | Binomial crossover |
| Mutation strategy | DE/rand/1 |
| Parameter | |||||||
| Search range | [−20, 20] | [20, 50] | [−30, 30] | [−30, 30] | [−30, 30] | ||
| Parameter | |||||||
| Search range | [−20, 20] | [−40, −10] | [−30, 30] | [−30, 30] | [−30, 30] | [100, 200] | [0, 100] |
| Parameter | |||||||
| Search range | [−30, 30] | [20, 100] | [−30, 30] | [−30, 30] | [−30, 30] | ||
| Parameter | |||||||
| Search range | [0, 90] | [80, 200] | [−45, 45] | [−30, 30] | [−30, 30] | [−20, 20] | [−40, −10] |
| Seed Number | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 1.68 | 1.68 | 1.68 | 1.68 | 1.68 | |
| 0.64 | 0.64 | 0.64 | 0.64 | 0.64 | |
| 1.04 | 1.04 | 1.04 | 1.04 | 1.04 | |
| −2.09 | −2.09 | −2.09 | −2.09 | −2.09 | |
| 33.99 | 33.99 | 33.99 | 33.99 | 33.99 | |
| −0.46 | −0.46 | −0.46 | −0.46 | −0.46 | |
| 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | |
| 0.72 | 0.72 | 0.72 | 0.72 | 0.72 | |
| 193.33 | 193.33 | 193.33 | 193.33 | 193.33 | |
| 31.62 | 31.62 | 31.62 | 31.62 | 31.62 | |
| 1.51 | 1.51 | −1.51 | −1.51 | −1.51 | |
| −11.93 | −11.93 | 11.93 | 11.93 | 11.93 | |
| −1.26 | −1.26 | −1.26 | −1.26 | −1.26 | |
| −0.46 | −0.46 | −0.46 | −0.46 | −0.46 | |
| −22.27 | −22.27 | −22.27 | −22.27 | −22.27 | |
| Seed Number | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 7.10 | 7.10 | 7.10 | 7.10 | 7.10 | |
| 4.86 | 4.86 | 4.86 | 4.86 | 4.86 | |
| 2.24 | 2.24 | 2.24 | 2.24 | 2.24 | |
| 11.79 | 5.67 | 1.99 | 2.45 | 13.22 | |
| 91.02 | 91.02 | 91.02 | 91.02 | 91.02 | |
| 10.25 | 10.25 | 10.25 | 10.25 | 10.25 | |
| −0.51 | −0.51 | −0.51 | −0.51 | −0.51 | |
| −13.07 | −6.95 | −3.27 | −3.73 | −14.50 | |
| 20.18 | 2.57 | 3.34 | 6.11 | 0.45 | |
| 94.79 | 94.79 | 94.79 | 94.79 | 94.79 | |
| 35.09 | 35.09 | 35.09 | 35.09 | −35.09 | |
| −5.33 | −5.33 | −5.33 | −5.33 | 5.33 | |
| −26.08 | −8.48 | −9.28 | −12.01 | −6.36 | |
| −0.86 | −0.86 | −0.86 | −0.86 | −0.86 | |
| −24.49 | −24.49 | −24.49 | −24.49 | −24.49 | |
| Trial Number | ||||||
|---|---|---|---|---|---|---|
| Mean Touching Error | 1 | 2 | 3 | 4 | 5 | Average |
| in px | 6.47 | 6.80 | 6.62 | 6.38 | 6.64 | 6.58 |
| in mm | 1.23 | 1.29 | 1.26 | 1.21 | 1.26 | 1.25 |
| Seed Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | |
| 0.19 | 0.19 | 0.19 | 0.19 | 0.19 | |
| 0.82 | 0.82 | 0.82 | 0.82 | 0.82 | |
| −0.11 | −0.11 | −0.11 | −0.11 | −0.11 | |
| 0 | 0 | 0 | 0 | 0 | |
| 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | |
| 1.02 | 1.02 | 1.02 | 1.02 | 1.02 | |
| 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | |
| 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | |
| −0.11 | −0.11 | −0.11 | −0.11 | −0.11 | |
| 1.02 | 1.02 | 1.02 | 1.02 | 1.02 | |
| 0.99 | 0.99 | 0.99 | 0.99 | 0.99 | |
| −0.03 | −0.03 | −0.03 | −0.03 | −0.03 |
| Seed Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 4.27 | 4.27 | 4.27 | 4.27 | 4.27 | |
| 1.73 | 1.73 | 1.73 | 1.73 | 1.73 | |
| 2.54 | 2.54 | 2.54 | 2.54 | 2.54 | |
| −0.18 | −0.18 | −0.18 | −0.18 | −0.18 | |
| −0.28 | −0.28 | −0.28 | −0.28 | −0.28 | |
| 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | |
| 0.89 | 0.89 | 0.89 | 0.89 | 0.89 | |
| 3.77 | 3.77 | 3.77 | 3.77 | 3.77 | |
| 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | |
| 2.58 | 2.58 | 2.58 | 2.58 | 2.58 | |
| 0.98 | 0.98 | 0.98 | 0.98 | 0.98 | |
| 1.14 | 1.14 | 1.14 | 1.14 | 1.14 | |
| −4.51 | −4.51 | −4.51 | −4.51 | −4.51 |
| Trial Number | ||||||
|---|---|---|---|---|---|---|
| Mean Touching Error | 1 | 2 | 3 | 4 | 5 | Average |
| in px | 5.14 | 5.37 | 5.18 | 5.39 | 5.39 | 5.30 |
| in mm | 0.98 | 1.02 | 0.99 | 1.03 | 1.03 | 1.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sato, J. Hand–Eye Calibration Using a Tablet Computer. Math. Comput. Appl. 2023, 28, 22. https://doi.org/10.3390/mca28010022
Sato J. Hand–Eye Calibration Using a Tablet Computer. Mathematical and Computational Applications. 2023; 28(1):22. https://doi.org/10.3390/mca28010022
Chicago/Turabian StyleSato, Junya. 2023. "Hand–Eye Calibration Using a Tablet Computer" Mathematical and Computational Applications 28, no. 1: 22. https://doi.org/10.3390/mca28010022
APA StyleSato, J. (2023). Hand–Eye Calibration Using a Tablet Computer. Mathematical and Computational Applications, 28(1), 22. https://doi.org/10.3390/mca28010022