Sagnac Loop Based Sensing System for Intrusion Localization Using Machine Learning

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
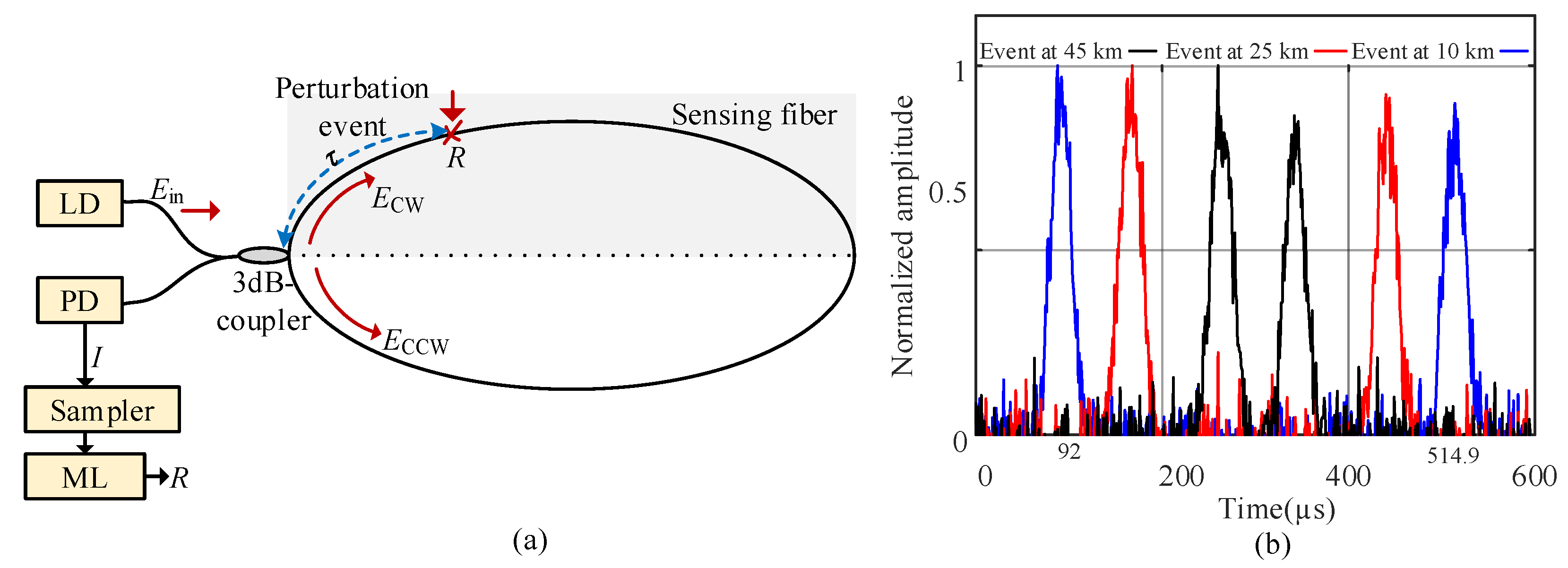
2. SI Loop Sensor Numerical Simulation Setup
3. Machine Learning Model
3.1. Dataset Generation
3.2. Regressor Training
3.3. Performance Metrics
4. Results and Discussion
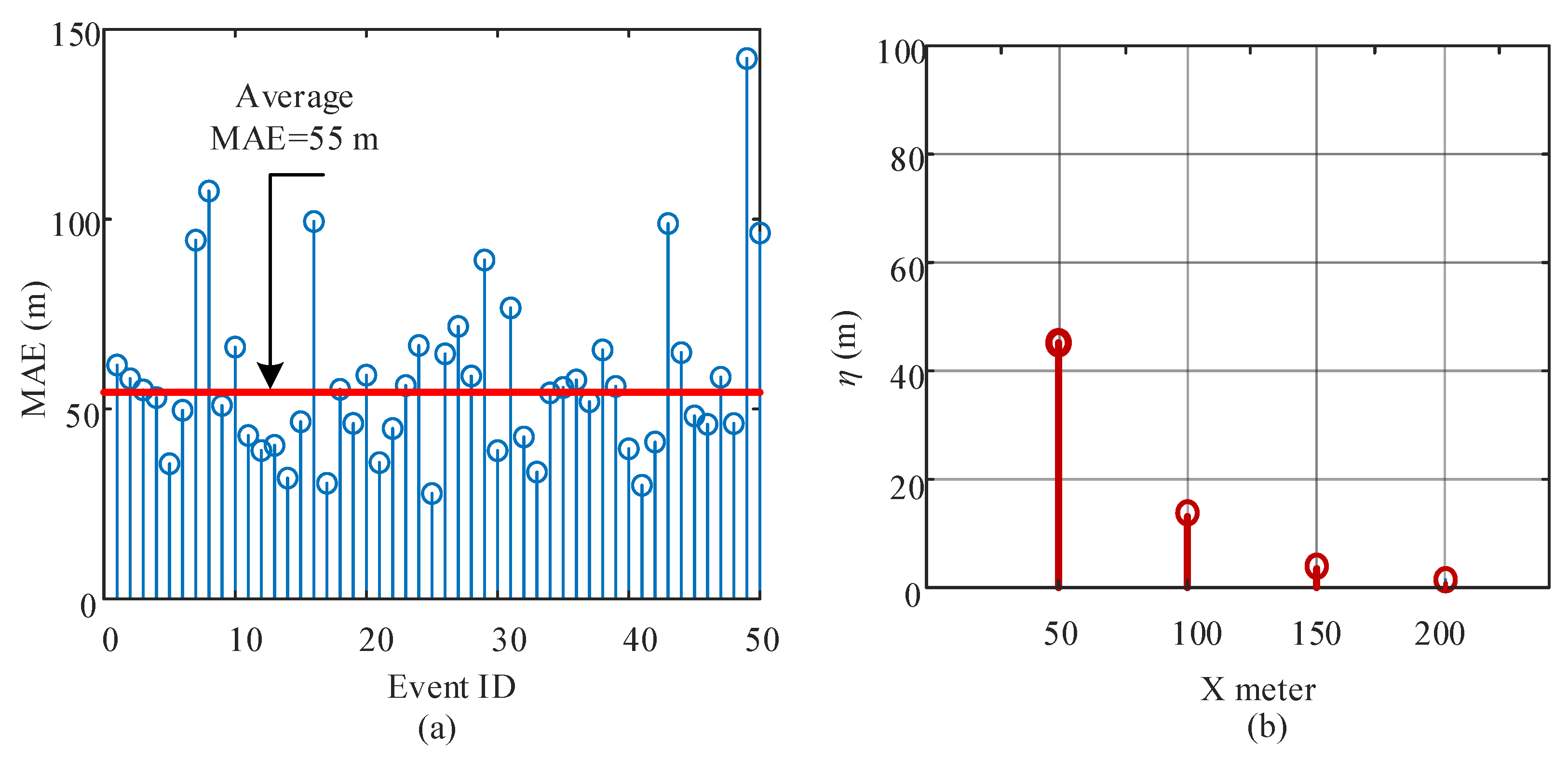
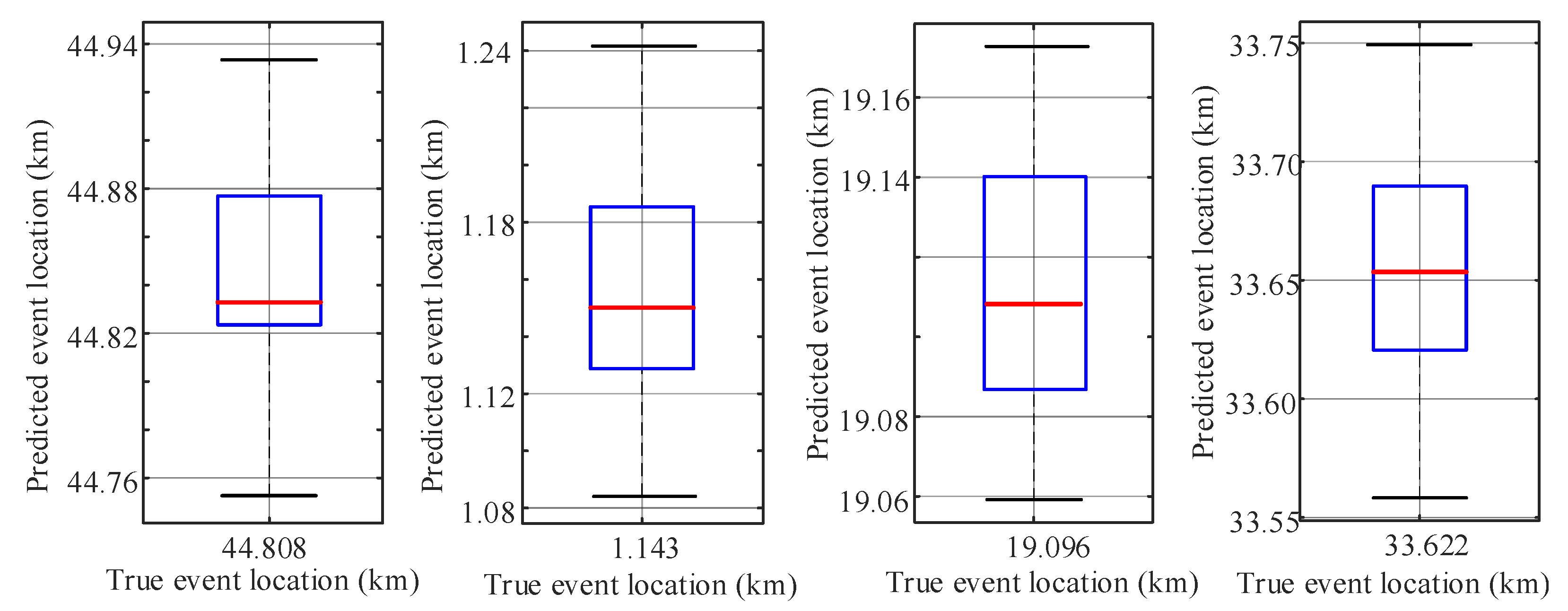
4.1. Performance of the Proposed Model
4.2. Performance Comparison with Other Regressors
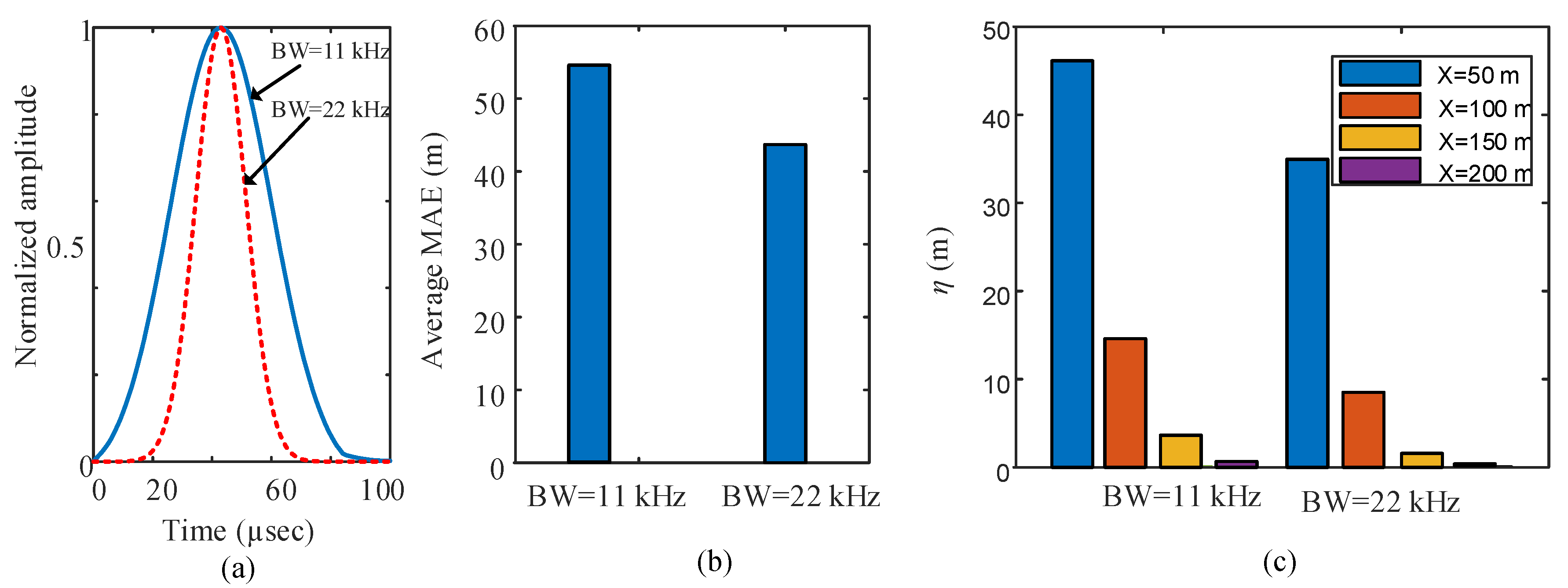
4.3. Effect of the Sensing Signal Bandwidth
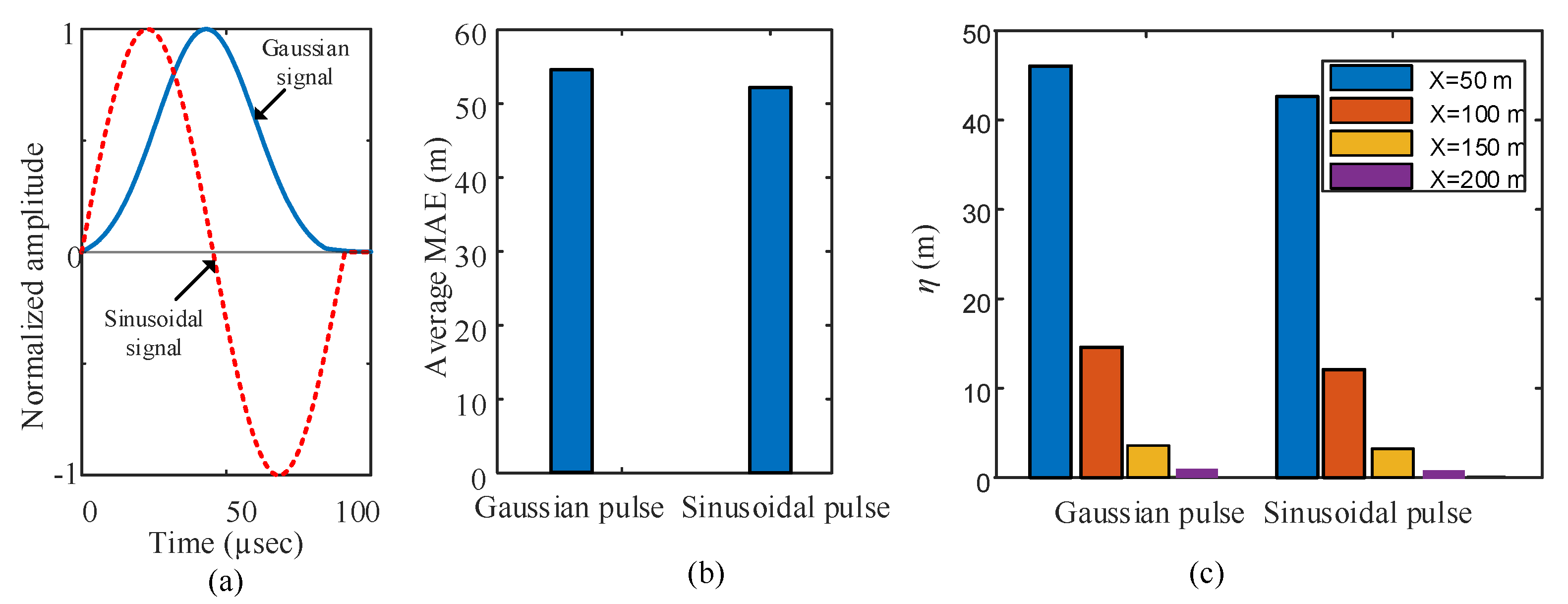
4.4. Effect of the Event Pulse Type
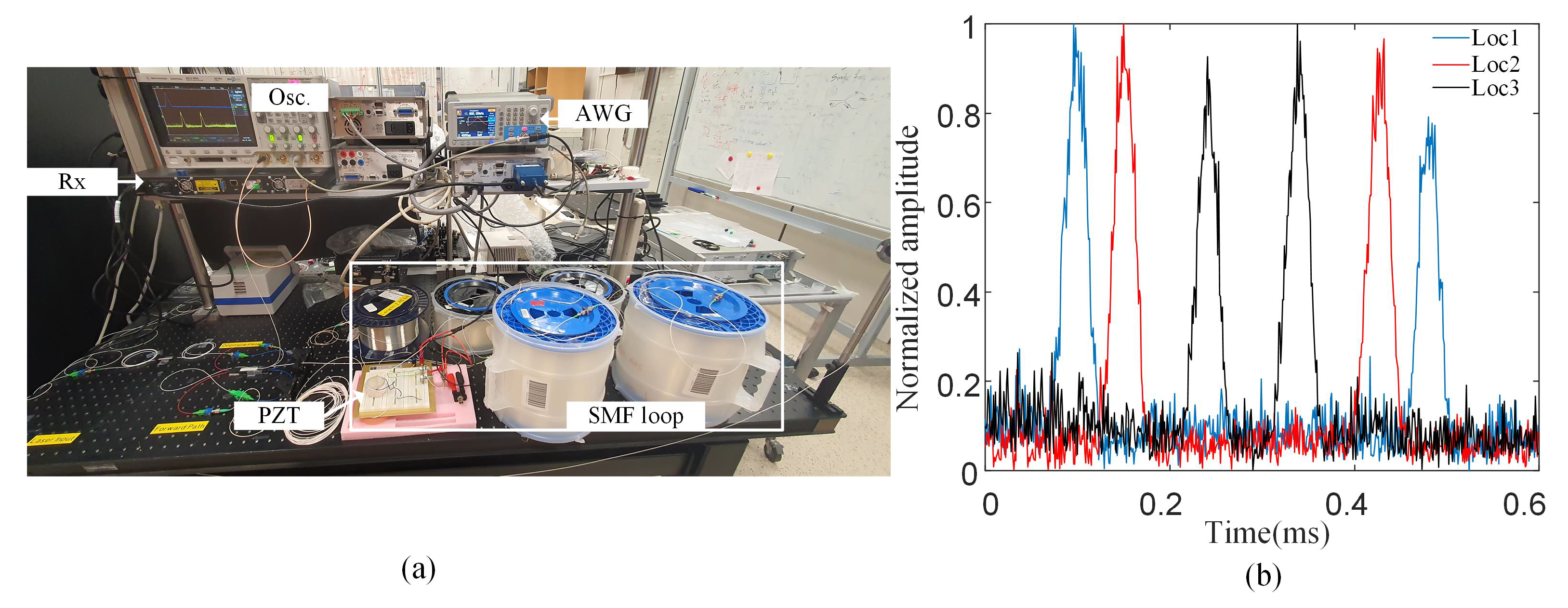
4.5. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Z.; Lu, B.; Ye, Q.; Cai, H. Recent Progress in Distributed Fiber Acoustic Sensing with Φ-OTDR. Sensors 2020, 20, 6594. [Google Scholar] [CrossRef] [PubMed]
- Allwood, G.; Wild, G.; Hinckley, S. Optical Fiber Sensors in Physical Intrusion Detection Systems: A Review. IEEE Sens. J. 2016, 16, 5497–5509. [Google Scholar] [CrossRef] [Green Version]
- Pi, S.; Wang, B.; Jia, B.; Sun, Q.; Zhao, D. Intrusion localization algorithm based on linear spectrum in distributed Sagnac optical fiber sensing system. Opt. Eng. 2015, 54, 085105. [Google Scholar] [CrossRef]
- Wang, H.; Sun, Q.; Li, X.; Wo, J.; Shum, P.P.; Liu, D. Improved location algorithm for multiple intrusions in distributed Sagnac fiber sensing system. Opt. Express 2014, 22, 7587–7597. [Google Scholar] [CrossRef]
- Ho, H.-R.; Hsieh, C.-Y.; Hsu, Y.-C.; Wang, L. Modified dual Mach–Zehnder interferometers with new locating algorithm for intrusion detection. Opt. Express 2021, 29, 34341–34359. [Google Scholar] [CrossRef]
- Teng, F.; Yi, D.; Hong, X.; Li, X. Optimized localization algorithm of dual-Sagnac structure-based fiber optic distributed vibration sensing system. Opt. Express 2021, 29, 13696–13705. [Google Scholar] [CrossRef]
- Fang, X. Fiber-optic distributed sensing by a two-loop Sagnac interferometer. Opt. Lett. 1996, 21, 444–446. [Google Scholar] [CrossRef]
- Fang, N.; Jia, D.; Wang, L.; Huang, Z. Distributed Fiber Optic In-Line Intrusion Sensor System. In Proceedings of the China-Japan Joint Microwave Conference, Shanghai, China, 10–12 September 2008. [Google Scholar]
- Yuan, W.; Pang, B.; Bo, J.; Qian, X. Fiber Optic Line-Based Sensor Employing Time Delay Estimation for Disturbance Detection and Location. J. Light. Technol. 2014, 32, 1032–1037. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, Y.; Song, Q.; Zhou, P.; Shen, L.; Peng, H.; Xiao, Q.; Jia, B. An Asymmetrical Dual Sagnac Distributed Fiber Sensor for High Precision Localization Based on Time Delay Estimation. J. Light. Technol. 2021, 21, 6928–6933. [Google Scholar] [CrossRef]
- Song, Q.; Zhou, P.; Peng, H.; Hu, Y.; Xiao, Q.; Wu, H.; Jia, B. Improved localization algorithm for distributed fiber-optic sensor based on merged Michelson-Sagnac interferometer. Opt. Express 2020, 28, 7207–7220. [Google Scholar] [CrossRef]
- Huang, J.; Chen, Y.; Peng, H.; Zhou, P.; Song, Q.; Huang, P.; Xiao, Q.; Jia, B. A 150 km distributed fiber-optic disturbance location sensor with no relay based on the dual-Sagnac interferometer employing time delay estimation. Opt. Commun. 2021, 479, 126420. [Google Scholar] [CrossRef]
- Venketeswaran, A.; Lalam, N.; Wuenschell, J.; Ohodnicki, P.R., Jr.; Badar, M.; Chen, K.P.; Lu, P.; Duan, Y.; Chorpening, B.; Buric, M. Recent advances in machine learning for fiber optic sensor applications. Adv. Intell. Syst. 2022, 4, 2100067. [Google Scholar] [CrossRef]
- Lv, J.; Fang, N.; Wang, L. Location Method Based on Support Vector Machine for Distributed Sagnac Fiber Sensing System. In Proceedings of the 18th International Conference on Optical Communications and Networks (ICOCN), Huangshan, China, 5–8 August 2019. [Google Scholar]
- Lv, J.; Fang, N.; Wang, C.; Wang, L. Location method of Sagnac distributed optical fiber sensing system based on CNNs ensemble learning. Opt. Laser Technol. 2021, 138, 106841. [Google Scholar] [CrossRef]
- Zhao, Y.; Shi, C.; Wang, D.; Chen, X.; Wang, L.; Yang, T.; Du, J. Low-complexity and nonlinearity-tolerant modulation format identification using random forest. IEEE Photonics Technol. Lett. 2019, 31, 853–856. [Google Scholar] [CrossRef]
- Khan, F.N.; Zhou, Y.; Lau, A.P.T.; Lu, C. Modulation format identification in heterogeneous fiber-optic networks using artificial neural networks. Opt. Express 2012, 20, 12422–12431. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saif, W.S.; Esmail, M.A.; Ragheb, A.M.; Alshawi, T.A.; Alshebeili, S.A. Machine learning techniques for optical performance monitoring and modulation format identification: A survey. IEEE Commun. Surv. Tutor. 2020, 22, 2839–2882. [Google Scholar] [CrossRef]
- Sullivan, W. Machine Learning for Beginners Algorithms, Decision Tree and Random Forest Introduction. 2017. Available online: https://www.amazon.com/Machine-Learning-Beginners-Algorithms-Introduction/dp/B07688Q3C6 (accessed on 15 March 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Event Location Interval | No. of Locations | Total No. of Realizations |
|---|---|---|---|
| Training | every 250 m | 200 | 20,000 |
| Testing | random in each 1 km segment | 50 | 1500 |
| Predicted Location (km) | Exact Loc. (km) | Avg. MAE ± Std (m) | |||||
|---|---|---|---|---|---|---|---|
| Loc1 | 14.116 | 14.070 | 14.205 | 14.119 | 14.097 | 14.190 | 74.6 ± 34.5 |
| Loc2 | 24.941 | 24.844 | 24.929 | 24.872 | 24.759 | 24.837 | 63.4 ± 36.5 |
| Loc3 | 43.258 | 43.250 | 43.220 | 43.285 | 43.217 | 43.345 | 99.1 ± 25.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esmail, M.A.; Ali, J.; Almohimmah, E.; Almaiman, A.; Ragheb, A.M.; Alshebeili, S. Sagnac Loop Based Sensing System for Intrusion Localization Using Machine Learning. Photonics 2022, 9, 275. https://doi.org/10.3390/photonics9050275
Esmail MA, Ali J, Almohimmah E, Almaiman A, Ragheb AM, Alshebeili S. Sagnac Loop Based Sensing System for Intrusion Localization Using Machine Learning. Photonics. 2022; 9(5):275. https://doi.org/10.3390/photonics9050275
Chicago/Turabian StyleEsmail, Maged A., Jameel Ali, Esam Almohimmah, Ahmed Almaiman, Amr M. Ragheb, and Saleh Alshebeili. 2022. "Sagnac Loop Based Sensing System for Intrusion Localization Using Machine Learning" Photonics 9, no. 5: 275. https://doi.org/10.3390/photonics9050275
APA StyleEsmail, M. A., Ali, J., Almohimmah, E., Almaiman, A., Ragheb, A. M., & Alshebeili, S. (2022). Sagnac Loop Based Sensing System for Intrusion Localization Using Machine Learning. Photonics, 9(5), 275. https://doi.org/10.3390/photonics9050275