1. Introduction
Many adaptive optics (AO) methods have been developed to compensate phase aberrations in a range of applications including astronomy, ophthalmology and microscopy [
1,
2,
3]. All AO systems are limited, in some way, by the capabilities of the adaptive element, typically a deformable mirror (DM) or a spatial light modulator (SLM), that corrects the aberrations. One such limitation is in the range of phase functions that the element can correct. The correction space of an AO element is defined by the range of phase functions that can be imparted by the device. For a pixelated AO device, such as a SLM or segmented DM, the correction space is defined by the set of accessible pixel states, which could be represented by the set of phase values for each pixel.
In many AO systems, it is preferable to design the system around a set of orthogonal modes for representation and control of the wavefront, rather than localized wavefront modulations. For example, wavefont-sensorless AO systems usually use a modal basis [
4,
5]. This method involves the sequential application of predetermined bias aberrations, the acquisition of a set of measurements of an appropriate quality metric, and then estimation of the required correction aberration. The conventional approach to sensorless AO is to use knowledge of the forward problem—that is how the quality metric is affected by input aberrations—to inform the design of an efficient estimation scheme that, in effect, solves the inverse problem of finding the optimal correction aberrations from the set of metric measurements. Such estimation can be performed using optimisation algorithms or neural networks (NN) to solve the inverse problem [
6,
7].
It is known that control using modes defined across the whole pupil provides stronger modulation of the optimisation metric than individual pixels or subregions of the pupil [
5]. Such whole-pupil modulation hence provides more robust operation, particularly in low-light level imaging scenarios when the signal-to-noise ratio (SNR) is low. For such pixel-based sensorless AO systems, Walsh modes are an appropriate choice. Walsh modes are a set of orthogonal functions that represent phase patterns across a pixelated pupil, where the number of pixels is equal to a power of 2 [
8,
9]. Each Walsh mode consists of an equal number of pixels taking each of the binary values
or
. For the different modes, a different combination of pixels takes the positive and negative values.
The binary nature of Walsh modes means that the range of each mode that must be searched to find the optimum correction is finite. This contrasts with other modal bases built upon continuous functions, such as Zernike polynomials, which would have unbounded range (albeit limited by the stroke of the adaptive correction element).
However, care needs to be taken when considering combinations of Walsh modes, as multiple combinations of modes can have the same effect on the system. This means that there are multiple potential solutions to the inverse problem of finding the optimal set of Walsh mode coefficients that optimise aberration correction. These multiple solutions can cause complications in defining an estimator to solve the inverse problem. Solving the inverse problem would be considerably simplified if we could ensure that there was only one optimal solution in the search space.
We show that there are properties of the Walsh modes that link the operation of these sensorless AO systems to the mathematics of lattices [
10]. We discuss how these mathematical properties can aid the design of aberration estimation algorithms by constraining the search space. Specifically, we show heuristically that through understanding of the lattice geometry, we can define a unique finite search space, in terms of combinations of Walsh mode coefficients, that contains a single optimum correction. This permits the implementation of an efficient NN-based optimisation scheme that can measure and correct any combination of
N Walsh modes of any coefficient value using only
metric measurements. We show that a simple NN can be trained to solve the inverse problem if the search space is constrained using the lattice model, whereas the correct combination of Walsh mode coefficients cannot reliably be found for a nonconstrained search space.
2. Optical System Model
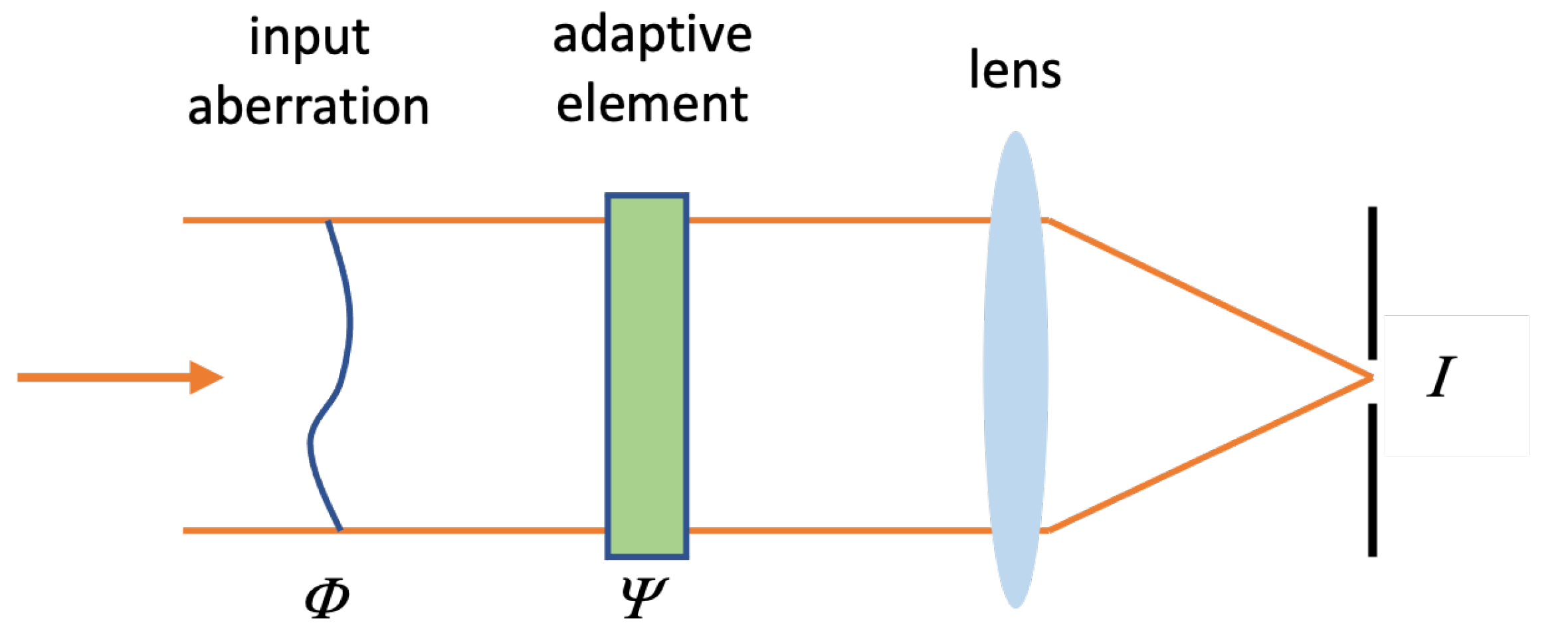
For the purposes of modelling, we considered the simple sensorless adaptive optics system shown in
Figure 1. Such a model has been extensively used for analysis of such sensorless systems [
11,
12], as the principle of operation is readily extendable to similar optical systems, including applications in laser material processing, free-space communications, and laser scanning microscopy.
The input beam to the system is collimated and has uniform amplitude. The input phase aberration is
and the phase
is added by the adaptive element (AE), which could be a pixelated SLM or a segmented DM. These are both considered to be added at the pupil
P, which is taken to have unit radius;
is the normalised coordinate vector in the pupil. The lens performs a Fourier transform of the pupil field to provide a focal field. A vanishingly small pinhole detector is placed on axis at the centre of the focus and detects a signal
I that corresponds to the on-axis intensity at the focus. This is equivalent to the power of the zero-frequency component of the Fourier transform, which is equivalent to the squared modulus of the mean value of the pupil field. Mathematically, this can be expressed as
where the maximum, aberration-free signal is normalised to 1.
3. Representation of Aberrations as Walsh Modes
For simplicity, let us assume
so that all aberrations can be represented within
. Let us also assume that the adaptive element is a pixelated device, where each of the N pixels can introduce a piston phase. The phase introduced by the adaptive element could be expressed as
where
are the phase influence functions of each pixel, which have value 1 within the pixel area and 0 elsewhere;
are the coefficients of these influence functions, which correspond to the pixel phase value. Alternatively, we could represent the AE phase as
where
are functions that take binary values of
or
in each pixel region, such that the
lth pixel takes on the
lth value of the
kth Walsh function of length
N,
[
8].
are the coefficients of these functions
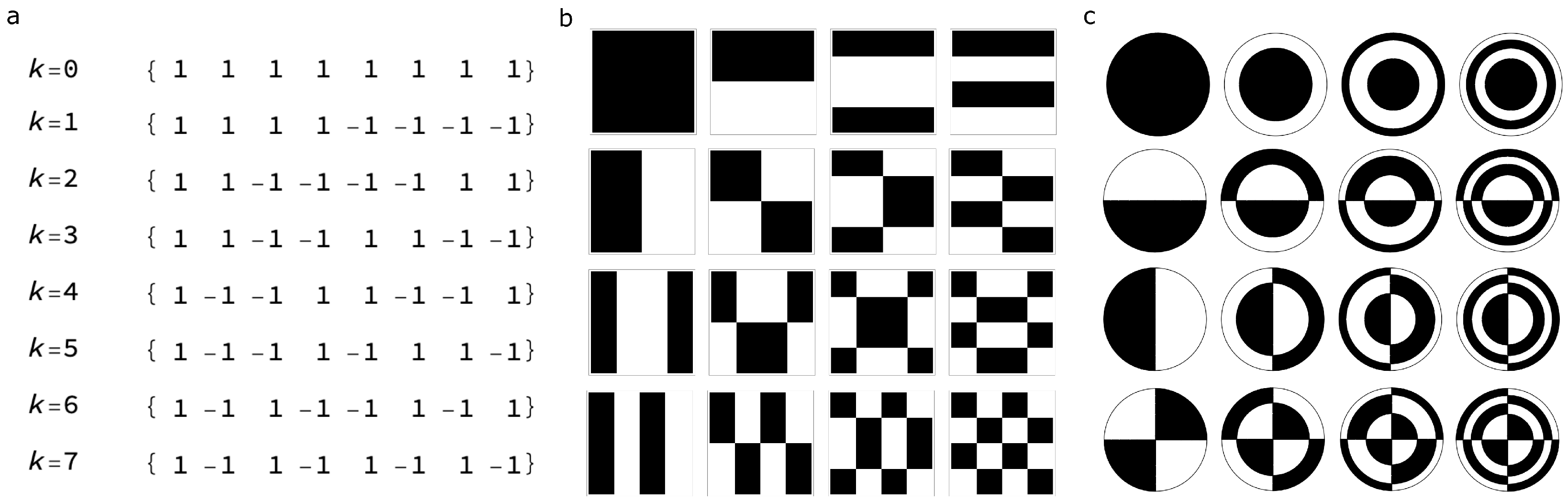
. For a given sequence length
, where
is an integer, there are N orthogonal Walsh functions, each of which consists of
elements of value
or
, except for the first function that consists entirely of 1 s (see examples in
Figure 2). We follow the convention that the Walsh function index starts at
. From the above relationships, it is clear that each pixel phase can be represented as
or alternatively in matrix–vector format as
where
is a vector of length N that contains the phase value of each pixel,
is a vector of length N that contains the coefficient of each Walsh function and
is an
Walsh–Hadamard matrix consisting of values
[
13,
14]. The rows of this matrix correspond to each of the Walsh functions. The matrix
provides the mapping between the Walsh coefficients and the pixel values. For Hadamard matrices,
, where
is the identity matrix of size N [
13,
14]. Hence, we can invert Equation (
5) as
Note that for a set of Walsh functions to be defined, we require
, where
is an integer. We assume throughout this paper therefore that
. However, Hadamard matrices also exist for
, where
is an integer [
13,
14]. For simplicity, these other matrices will not be considered in this current analysis.
4. Lattice Symmetry of Aberration States
We can define the aberration state fully as the vector of pixel values
. Thus, we can consider that a point at position
in the
N-dimensional space of pixel values is equivalent to an aberration state where any coefficient
is replaced by
, where
q is an arbitrary integer. This reveals a repetitive structure in each coordinate of the
N-dimensional space that results in a lattice type symmetry. Hence, in this space, there is an infinite number of points that represent a given aberration state and these points are arranged in a transformed integer lattice
that is scaled by a factor of
and offset by the pixel value
along each dimension. Furthermore, the lattice structure is based around a fundamental unit that is an
N-dimensional cube of side length
; this fundamental unit is known as a Voronoi cell [
10].
The matrix–vector operation of Equation (
6) can now be interpreted as a rotation (as
is an orthogonal matrix) and scaling by
of the vector
to give the Walsh coefficient vector
. The lattice symmetry is hence maintained in a rotated and scaled form when the state is described by
. When represented by the vector
, any Walsh function consists of equal magnitude amounts (
or
) of each pixel value, so the vector must be directed along certain body diagonals of the cubic Voronoi cell. After transformation, these body diagonals lie along the axes of the vector space containing
. This lattice symmetry will be used for derivations later in this article.
5. Effects of Pixels and Modes on Signal Modulation
Let us assume that each pixel of the AE has equal area (the pixels should have equal area if the amplitude profile at the pupil is uniform. For nonuniform illumination, the pixel area should be varied to provide the same total power in each pixel (e.g., the pixels could be large near the edge of the pupil for a Gaussian illumination profile.) No constraint is placed here on the position or shape of the pixels.), so that the integration used in Equation (
1) can be replaced by a summation, assuming here that
:
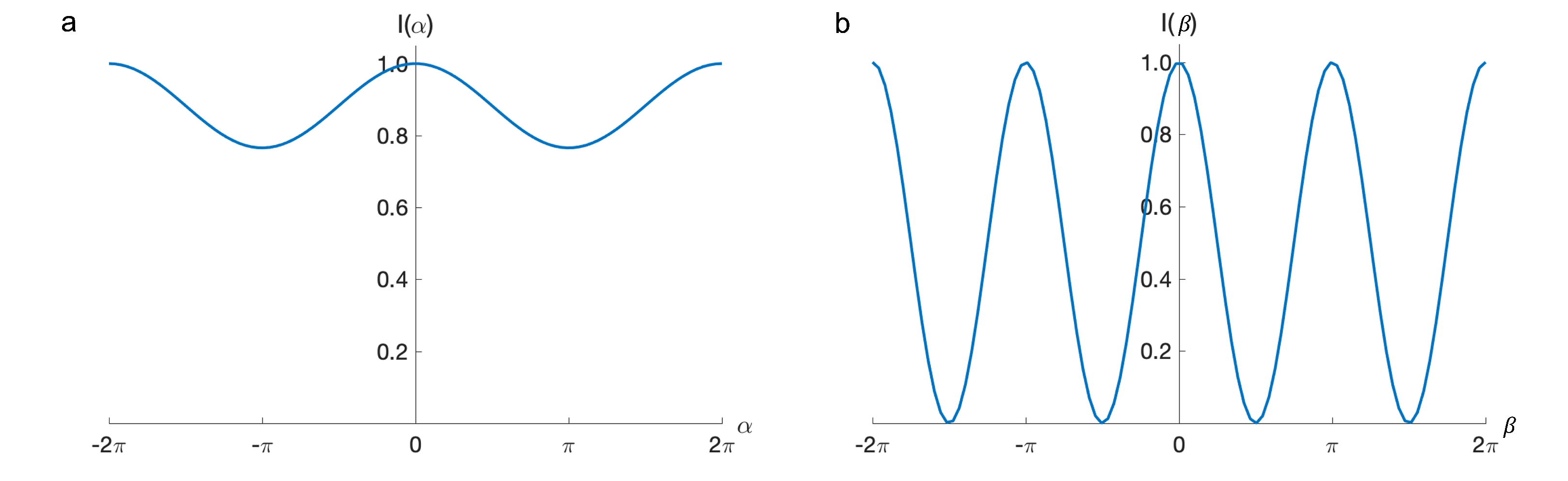
If the arbitrarily chosen
lth pixel is varied and all other pixel values have the same value (here arbitrarily set to zero), then
where the modulation depth
. For all other Walsh functions other than
, the signal is also cyclic as a function of
:
where the modulation depth has the maximum possible value of 1 and the period in terms of
is
. The effects of single pixel and modal variations are shown in
Figure 3.
If a combination of Walsh modes is present with small coefficients, we can use a Maclaurin expansion of the exponential in Equation (
7) to give
The term in the final bracket
is equal to zero except for when
, in which case it has value 1. The orthogonality property of the Walsh functions means that
in the second term is equivalent to the Kronecker delta function
. Hence, the signal is approximately
This is equivalent to the well-known approximation of the Strehl ratio as , where is the root mean square value of the aberration, which in this case is equal to .
6. Defining a Well-Corrected System
If we define our system to be “well-corrected” when the root-mean-square (rms) phase error is below a chosen value, such that
, then the system will be well-corrected when
. We can also express the second term in Equation (
11) as a length
vector
, which is equivalent to
with the piston coefficient removed, as
Our condition for being well-corrected is hence equivalent to requiring that . Interpreted geometrically, this means that any point within an -dimensional spherical volume of radius centred on the point where will be considered well-corrected.
In practice, the total aberration in a system will be the sum of the input aberration and that introduced by the AE, that is . The values of discussed here consolidate these two sources of aberrations to represent the residual aberrations, such that we seek a perfect correction for which . We will also assume for this analysis that the input aberration consists entirely of modes that can be corrected by the AE.
7. Vector Space Representation of Well-Corrected States
The signal variation as a function of pixel values was given in Equation (
7) and can be expressed alternatively as
where
. From this, we find the value
can only be obtained if
for all
l. We derive this result by considering the phasor sum of each of the terms in the final modulus expression: the maximum signal is only obtained when all of the exponential terms in the summation are real.
In a more general case where all pixels are offset by a mean pixel phase value
c rather than the first pixel phase value, we could state that
only if each element of the vector
has a value
where
n is an arbitrary integer. We can also express the signal explicitly as
; this is a function of the vector
, which describes a point in an
N-dimensional space. In this way, we can see that
has maximum value 1 at the origin of this space when
c is zero. Furthermore, we see that there is an infinite number of points in this space at which
. For example, on each of the axes, there are points where
that are equally spaced at steps of
. Varying the value of
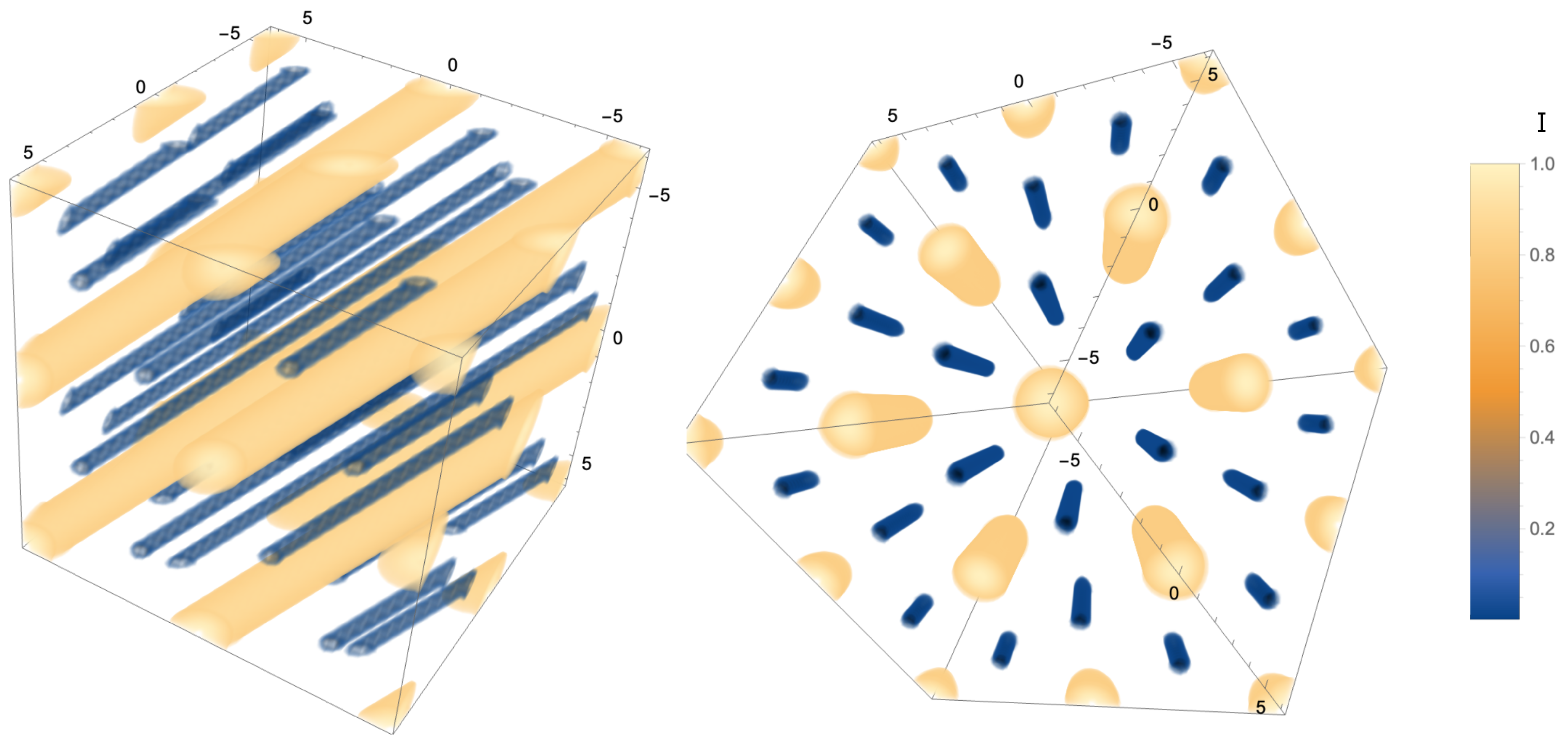
c is equivalent to adding a constant phase to every pixel (or equivalent to adding the piston mode to the whole pupil) and thus has no effect on the signal. We deduce therefore that there are infinite lines of
parallel to the vector
. As the value of
c has no effect on the signal, we can set this arbitrarily to zero without affecting further analysis. This is equivalent to removing the piston mode. It is also equivalent to taking the
dimensional subspace including the origin in an orientation orthogonal to the direction
. The position of the maxima in this slice would be equivalent to the positions of a scaled version of the integer lattice
, as explained in
Section 3, projected along the direction
. An illustration is provided in
Figure 4.
8. Lattice Representation of States after Removal of Piston
The removal of the piston mode is equivalent to the removal of the first row of the matrix
to create the reduced matrix
and removing the corresponding element of
to obtain a reduced vector
so that
As row–column products represent dot products between Walsh vectors, the following relationship is valid:
, so Equation (
14) can be inverted as
We can interpret Equation (
15) as a transformation from an
N-dimensional vector of pixel values
to an
-dimensional vector of Walsh modal coefficients
.
The matrix
is, however, a redundant representation, as the column space has dimension greater than its rank. This is rectified by removal of any one of the columns to create the matrix
; we choose arbitrarily to remove the first column. In order to maintain the form of Equation (
15), we remove the first element of the vector
to produce a new vector
. From a practical perspective, this means that the pixel value
is a dependent parameter determined by the other pixel values because of removal of the piston mode.
The operation performed by matrix
is to map the vector
to the corresponding vector
. Similarly, the operation of
would be to transform (project) the positions of the maxima of
, which were located on lines passing through a scaled integer lattice
(as illustrated in
Figure 4), to another lattice in the
-dimensional space spanned by
.
We can determine the properties of this new lattice by considering its Gram matrix, which is the matrix of the inner products between its lattice vectors [
10]. The Gram matrix is hence given by
where the factor of
has been chosen so that the basis vectors are equivalent to Walsh functions with normalised vector magnitudes.
is equivalent to the Gram matrix of the so-called
lattice [
10], which is an
-dimensional analogue of the body centred cubic (BCC) lattice in three dimensions. It follows that the maxima in the
-dimensional space spanned by
must be located at the lattice points of a scaled
lattice.
Understanding the symmetries of this lattice thus provides an understanding of the symmetries of the function . For example, the response of the signal around each lattice point should be identical. In other words, for all m, where represents an arbitrary lattice point. As there is an infinite number of lattice points, there is an infinite combination of the Walsh coefficients that can provide the optimal correction. Furthermore, correction to a precision of can be achieved by finding a setting for the adaptive correction device that places within a sphere of radius centred upon any of the lattice points.
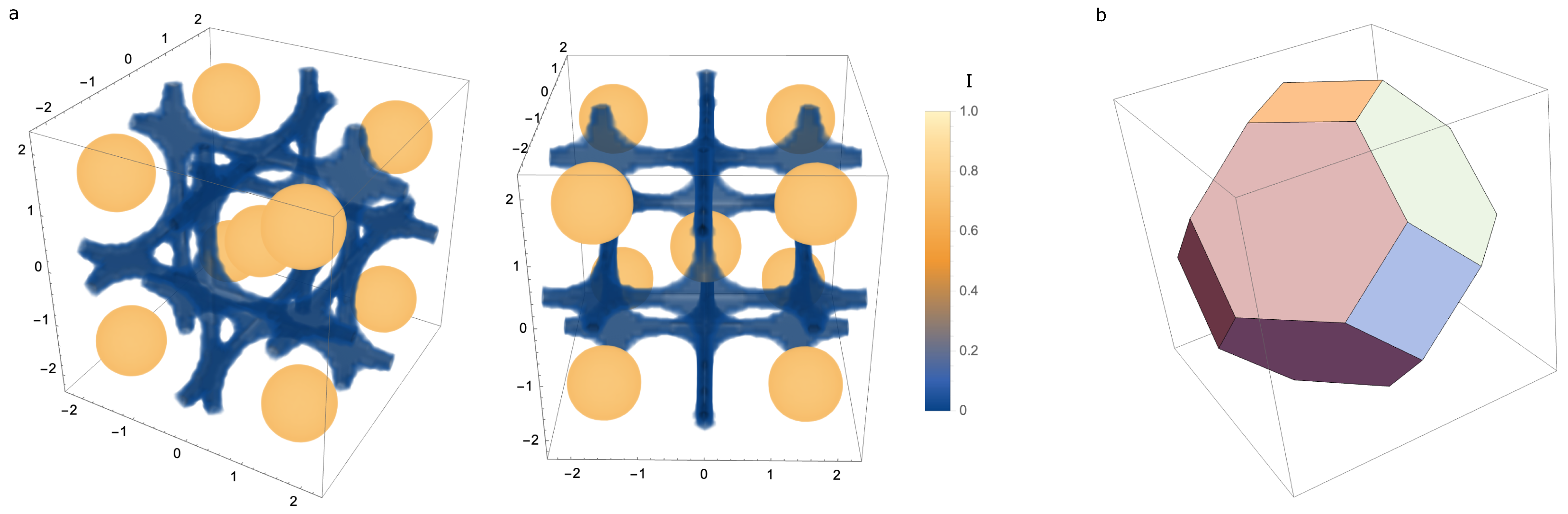
9. Fundamental Correction Space
The lattice model allows us to define a fundamental correction space—that is, the range of
we must search to find an optimal correction. This fundamental correction space is smaller than the correction space covered by all pixel values in the range 0 to
radians. The lattice symmetry of the function
indicates that we need only search the Voronoi cell of the lattice in order to cover all possible states. Therefore, the search space is the Voronoi cell of the scaled
lattice, whose properties are known [
10]. The position of the cell’s vertices can be readily calculated. For example, the Voronoi cell of the
(or BCC) lattice is a truncated octahedron; this would be the Voronoi cell for a
pixel system and is illustrated in
Figure 5.
Using the symmetries of the Voronoi cell, further general properties of this fundamental correction space can be derived. Moving along any of the axes from a lattice point at which
, we encounter another lattice point at a distance
(noting that this corresponds to the variation of a single Walsh function, the pixel values of which will be
for this value of
b; see Equation (
9)). Therefore, the halfway point between lattice points along the axis is at a distance
. Hence, the distance between two faces of the Voronoi cell along such an axis is
. By looking solely along the axes, one might assume that the search space is an
-dimensional cube of side length
, which would have a volume of
. However, the Voronoi cell’s volume is given by
which is a factor
smaller than the encompassing hypercube [
10]. Hence, for large numbers of pixels, the search space is considerably smaller than might be assumed if considering the pixel phases directly.
10. Implications of the Lattice Structure for Sensorless AO
We have shown that searching the Voronoi cell of the lattice is sufficient to find the optimal correction in the whole Walsh coefficient space of the adaptive element. The lattice structure also means that this same cell repeats over the whole space. Consequently, if the aberration in the system can be accurately represented by a finite number of Walsh modes, then the necessary search space is finite. This contrasts with an aberration represented by a finite number of continuous modes, such as Zernike polynomials, where the search space would have to be infinite in extent to cover all possible coefficient values.
In modal sensorless AO correction schemes, a sequence of predetermined bias aberrations for fixed set of correction modes is applied to the adaptive element and the corresponding signal values are recorded. From this set of measurements, the correction aberration is estimated using an appropriately chosen optimisation algorithm. When using continuous modes, such estimation can provide accurate correction for aberrations over a limited magnitude range but usually provides poor estimation outside this range. Using Walsh modes, however, the finite search space within one Voronoi cell of the lattice structure for a fixed set of modes means that it is possible to design a correction scheme that is accurate across all possible aberrations within the Walsh mode set. For the continuous modes, the bias aberrations span a finite range, such as in the typical configuration for sensorless AO of having equal magnitude positive and negative biases for each mode. However, the same configuration for Walsh modes in effect spans an infinite range, as the bias positions are also repeated in the lattice structure across the whole coefficient space.
If a sequence of intensity measurements is taken with bias aberrations defined as each Walsh mode with an amplitude of
, the set of measurements is related to the Walsh transform of the pixel values (see
Appendix B). The sum of these measurements is equal to the intensity after aberration correction. This has important implications for the normalisation of measurements for use in aberration estimation algorithms.
11. Neural Network for Solution of the Inverse Problem
We used the knowledge of the fundamental correction space to design estimators for a sensorless AO scheme. Specifically, the estimation process should solve the inverse problem to obtain aberration coefficients from the set of biased intensity measurements. We choose to demonstrate this with a NN estimator, whose design incorporates physical knowledge of the system. This method was chosen as it is more readily extendable to more advanced AO systems than conventional optimisation algorithms.
In this demonstration, we compare two similar NN-based methods for which the search space is defined differently. In the first case, it was assumed that each of the Walsh mode coefficients can take any value . This was equivalent to taking any point in a -dimensional cube in coefficient space (we refer to this as the “hypercube cell”). In the second case, the coefficients were chosen so that they lie only within the Voronoi cell centred at the origin (we refer to this as the “primary Voronoi cell”). This primary Voronoi cell would be a sub-region of the hypercube used in the first case. Based upon the previous analysis, it was known that there would be a single point corresponding to optimum correction in the primary Voronoi cell but multiple such points in the hypercube cell.
Having multiple global optima in the search space can be detrimental when using neural networks to perform such an optimisation. This is because such ill-conditioned problems have no unique answer and thus prevent convergence of the network training. We employed a bespoke NN architecture that was developed to take advantage of the particular physical process used in the sensorless AO scheme. The overall process and the NN architecture are outlined here. More details about the NN can be found in
Appendix D. In order to adequately sample the space, a biasing scheme was chosen that used
measurements. This corresponded to the application of positive and negative biases of magnitude
for each of the
Walsh modes, excluding piston; an additional nonbiased measurement was also included. For the
kth mode, we denote the negatively bias measurement as
, the positively biased measurement as
and the unbiased measurement as
.
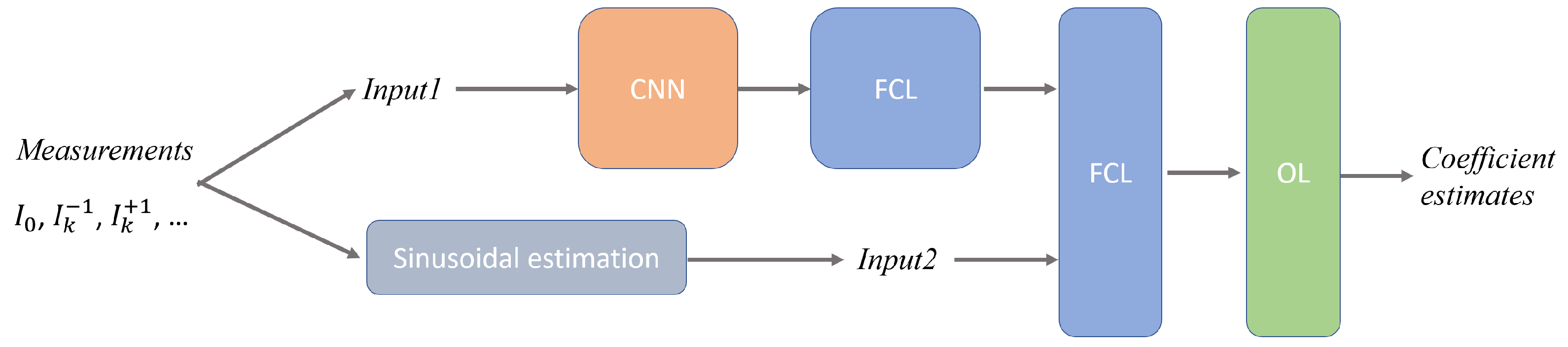
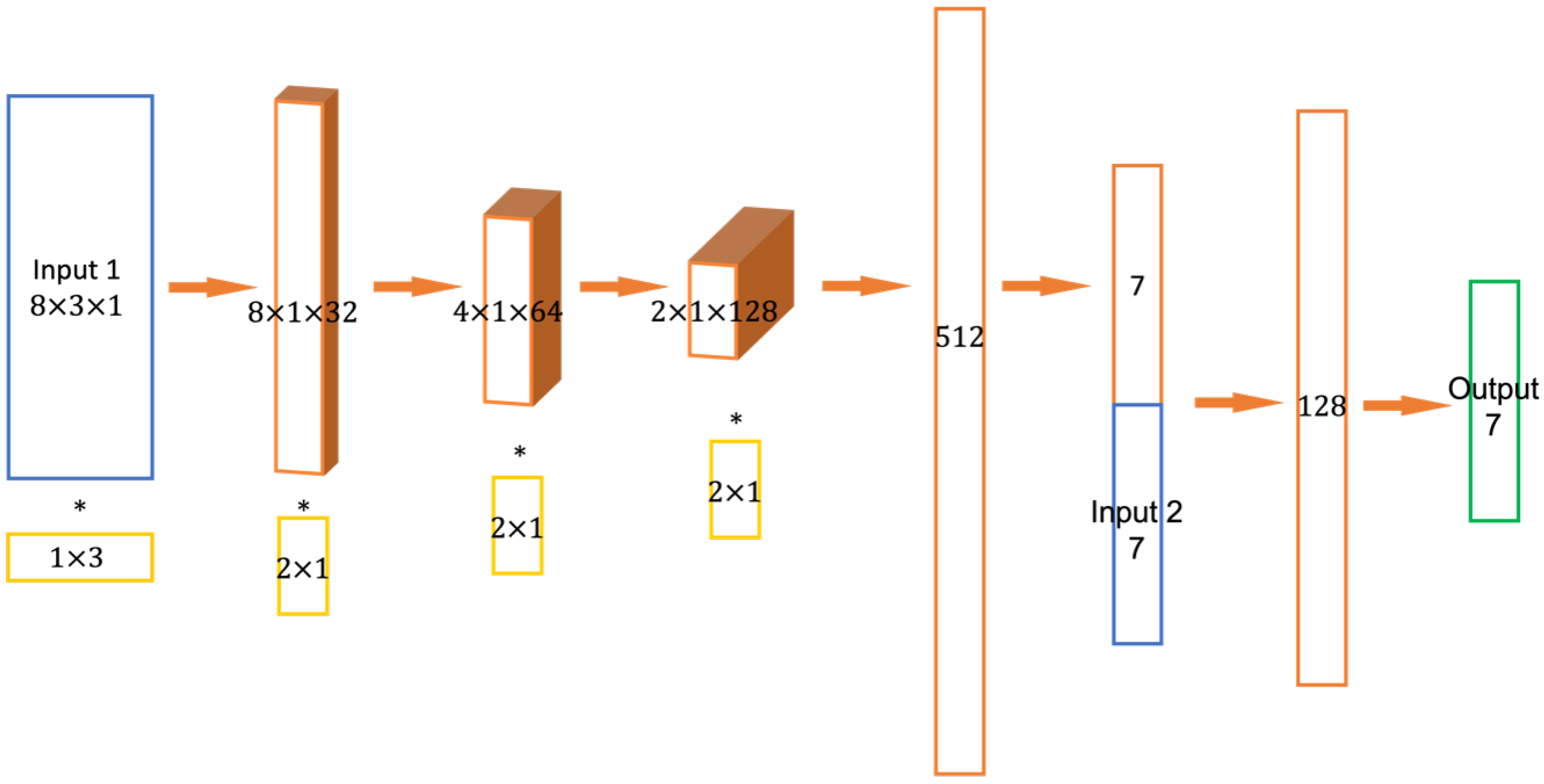
The NN process was constructed as shown in
Figure 6; a more detailed description of the architecture is given in
Appendix D. The NN takes two separate sets of inputs, both of which rely on biased intensities (generated using Equation (
1)): the first (
Input1) directly uses these normalised intensity values, while the second (
Input2) analytically processes the intensities based upon sinusoidal estimation to acquire a set of preliminary aberration coefficient estimates. The first input is passed into a convolutional neural network (CNN) followed by fully connected layers (FCL). It is then concatenated with the second input (
Input2) and passed into fully connected layers to generate the outputs that correspond to the estimated Walsh coefficients. The rationale behind this dual input approach was that the learning task would be easier if based, in effect, on the differences between rough estimates and actual measurements rather than on the raw measurements themselves.
Input1 was structured in the instance of
, as a matrix in the following form
This structure was chosen so that the CNN block could interpret known correlations from biased measurement values. Indeed, the first CNN layer was structured so that it operated first on the 3-tuples of intensity values contained in each row of Input1, which were each expected to depend primarily on the corresponding coefficient . Further CNN layers sought to operate on correlations between the different coefficients.
The rough estimation used for
Input2 was based upon the knowledge that variations in a single Walsh mode coefficient led to a sinusoidal relationship with detected signal (see
Appendix C). The value of each coefficient in
Input2 was set to the value that provided the maximum value of this sinusoidal variation. This estimation provides only a rough value for correction, as it treats each coefficient separately and hence does not deal with the coupling effect between combinations of modes.
Separate instances of this NN architecture were trained for the two scenarios. In the first case of the hypercube cell, the training and validation data were obtained by assigning a random value to each input coefficient in the range
. For the second case, the same combinations of coefficients were “wrapped” so that they lay only within the primary Voronoi cell (see
Appendix D). In each case, the same calculated intensity measurements were used at the input. The difference between the two training processes lies in the coefficient labels that were used to calculate the loss function during network training—in the first case, the coefficient labels were defined throughout the hypercube cell; in the second case, the corresponding labels were wrapped into the primary Voronoi cell. Full details of the training procedure are provided in
Appendix D.
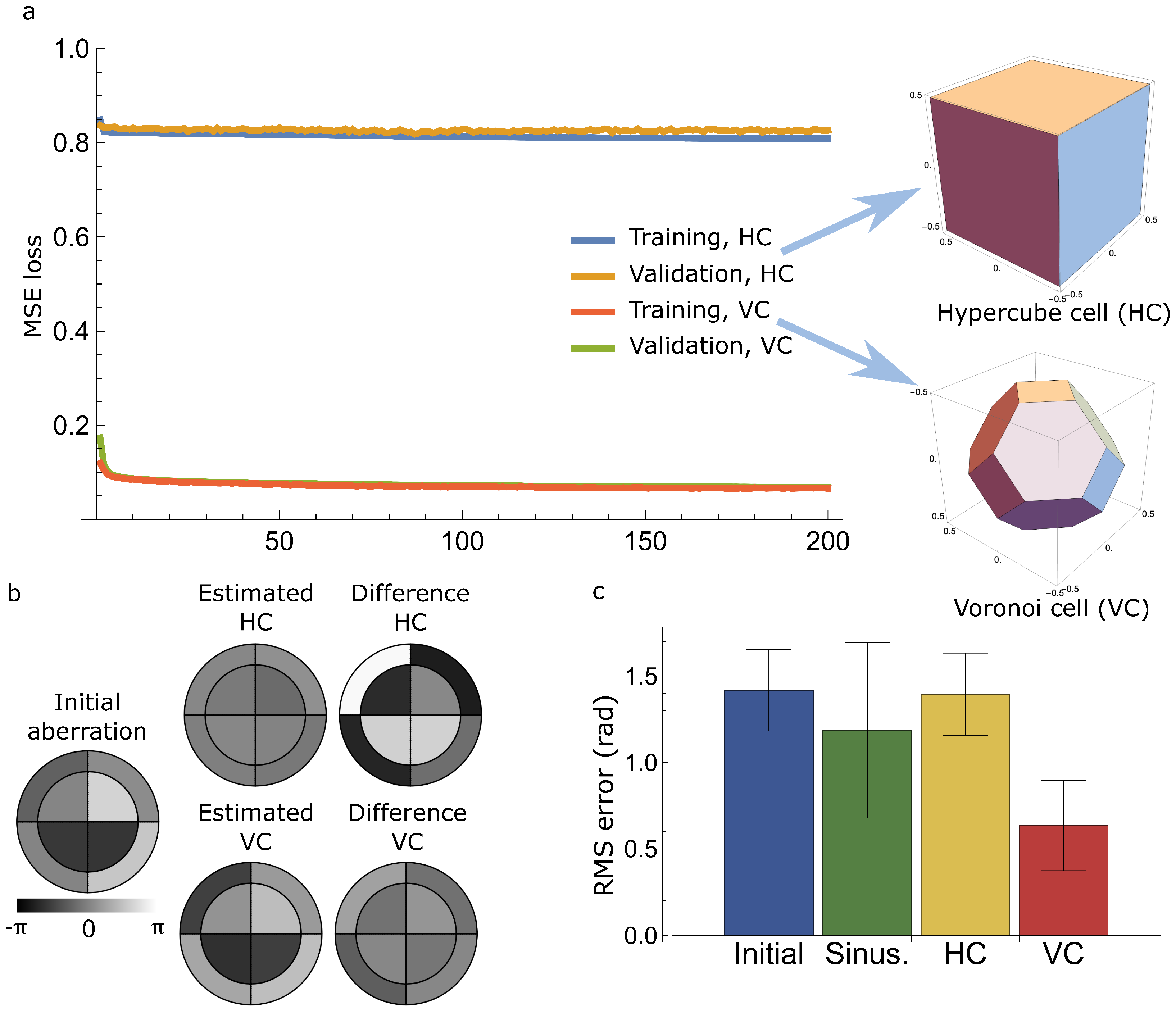
Results are shown in
Figure 7 for the case of
, which corresponds to the correction of 7 Walsh modes. The loss function curves showed that only the scenario of confining the coefficient to within the primary Voronoi cell permitted the NN to converge. The mean squared phase error was reduced to 0.063 radians after correction, which corresponded to a Strehl ratio of approximately 0.6. In comparison, the loss for the hypercube case was significantly higher and the validation loss did not reduce while deviating from the training loss. This demonstrated the effectiveness of using prior knowledge about the lattice symmetries. It is expected that similar trends would be seen in scenarios with large pixel numbers, alongside more complicated NN architectures.
These results show clearly that the prior knowledge of the lattice geometry, and hence the need to confine the estimation to the primary Voronoi cell, is essential to effective training of the NN. When training using coefficients selected from the hypercube cell, the loss functions (which are related to wavefront estimation errors) do not converge sufficiently to provide good aberration correction. This is attributed to the existence of multiple optimal solutions within the hypercube cell that complicate the training process. However, this problem is avoided when using a training set where the labels were “wrapped” and the resulting labels were within the primary Voronoi cell, and thus only one optimal combination of Walsh mode coefficients is present.
12. Conclusions
The insight provided by the mathematical link between Walsh mode AO and lattices informs the design of efficient sensorless AO schemes. This is relevant to the solution of the inverse problem of how to estimate the aberration coefficients from metric measurements with different applied bias aberrations. The new insights are particularly important when using NNs to solve this inverse problem, as otherwise we suffer from the challenges caused by having multiple solutions for a given set of metric measurements, which requires more complicated networks.
Although the Walsh modes are pixelated, when sufficient pixels are used, they can provide a suitably accurate representation of low order aberrations. While continuous modes, such as the Zernike polynomials, are commonly used, they are not guaranteed to provide a good fit to high-order aberrations in the system, nor to the correction device, which may well be pixelated in nature. The results presented here have relevance not just for correction of low-order aberrations but also for high-order scattering compensation, where previously schemes have been based around control of Walsh modes (or similar) [
15,
16,
17].
The analysis presented in this paper was based around a simple AO focussing system. However, as the overall lattice geometry arises from the nature of the aberration representation, and not the AO system or the optimisation metric, a similar repetitive lattice structure and primary Voronoi cell will hold for any other AO system using Walsh modes as the basis. These results should therefore have relevance to any application of AO using pixelated correction devices.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








