Experimental Measurement of Steady and Transient Liquid Coiling with High-Speed Video and Digital Image Processing

Abstract
1. Introduction and Liquid Coiling Regimes
2. Test Apparatus Design and Calibration
2.1. Variable Syringe Pump Test Stand
2.2. System Control and Calibration
3. Image Recording and Analysis
3.1. Cameras and Lighting Used during Experiments
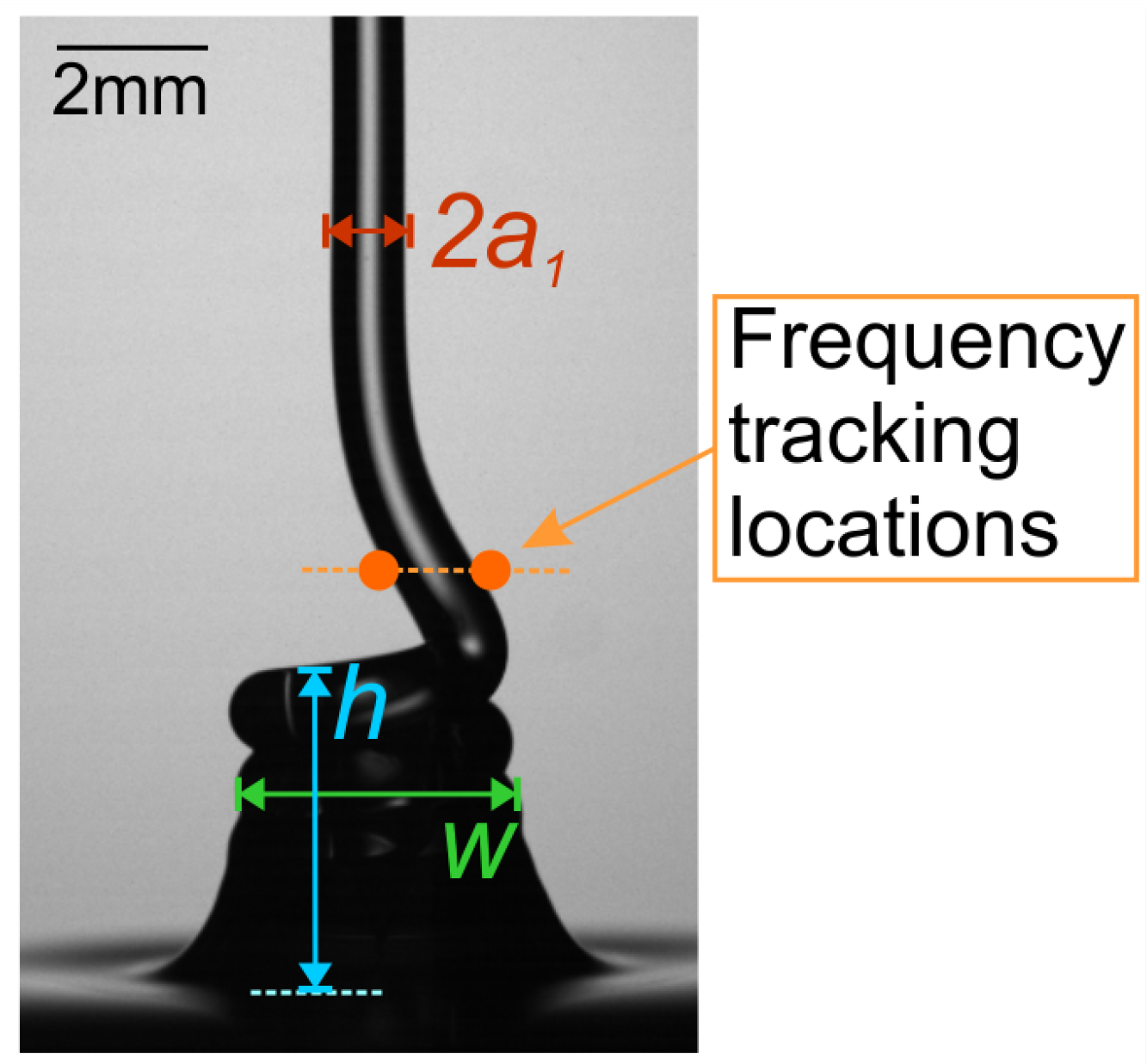
3.2. Automated Approach to Measuring Coiling Parameters from Images
4. Steady Coiling Experiments
4.1. Demonstrating Different Flow Regimes with Honey
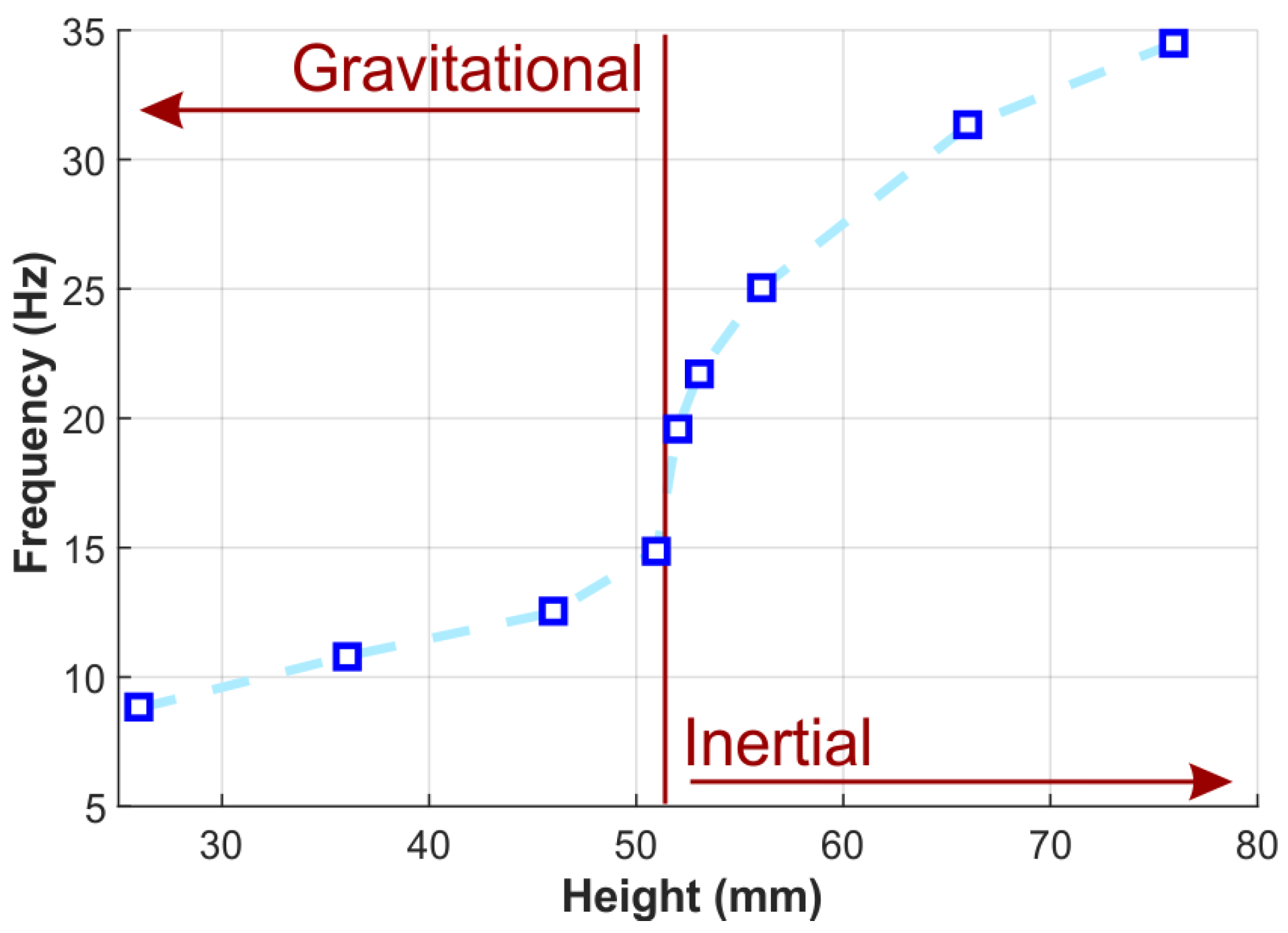
4.2. Varying Drop Height under Steady Conditions
5. Flow Regime Transitions during Unsteady Conditions
5.1. Transient Flow Rate
5.2. Introduction of Perturbations to Induce Unsteady Coiling Frequency
6. Non-Dimensional Analysis of Steady State Coiling
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CCD | charge-coupled device |
| NEMA | National Electrical Manufacturers Association |
| TTL | transistor-transistor logic |
| ROI | region of interest |
References
- Barnes, G.; Woodcock, R. Liquid rope-coil effect. Am. J. Phys. 1958, 26, 205–209. [Google Scholar] [CrossRef]
- Habibi, M.; Rahmani, Y.; Bonn, D.; Ribe, N.M. Buckling of liquid columns. Phys. Rev. Lett. 2010, 104, 074301. [Google Scholar] [CrossRef] [PubMed]
- Ribe, N.M. Coiling of viscous jets. Proc. R. Soc. Lond. Ser. A 2004, 460, 3223–3239. [Google Scholar] [CrossRef]
- Ribe, N.M.; Huppert, H.E.; Hallworth, M.A.; Habibi, M.; Bonn, D. Multiple coexisting states of liquid rope coiling. J. Fluid Mech. 2006, 555, 275–297. [Google Scholar] [CrossRef]
- Barnes, G.; Mackenzie, J. Height of fall versus frequency in liquid rope-coil effect. Am. J. Phys. 1959, 27, 112–115. [Google Scholar] [CrossRef]
- Ribe, N.M.; Habibi, M.; Bonn, D. Stability of liquid rope coiling. Phys. Fluids 2006, 18, 084102. [Google Scholar] [CrossRef]
- Habibi, M.; Maleki, M.; Golestanian, R.; Ribe, N.M.; Bonn, D. Dynamics of liquid rope coiling. Phys. Rev. E 2006, 74, 066306. [Google Scholar] [CrossRef] [PubMed]
- Ribe, N.M.; Habibi, M.; Bonn, D. Liquid rope coiling. Annu. Rev. Fluid Mech. 2012, 44, 249–266. [Google Scholar] [CrossRef]
- Chiu-Webster, S.; Lister, J.R. The fall of a viscous thread onto a moving surface: A fluid-mechanical sewing machine. J. Fluid Mech. 2006, 569, 89–111. [Google Scholar] [CrossRef]
- Habibi, M.; Hosseini, S.H.; Khatami, M.H.; Ribe, N.M. Liquid supercoiling. Phys. Fluids 2014, 26, 024101. [Google Scholar] [CrossRef]
- Habibi, M.; Moller, P.C.F.; Ribe, N.M.; Bonn, D. Spontaneous generation of spiral waves by a hydrodynamic instability. EPL 2008, 81, 38004. [Google Scholar] [CrossRef]
- Welch, R.L.; Szeto, B.; Morris, S.W. Frequency structure of the nonlinear instability of a dragged viscous thread. Phys. Rev. E 2012, 85, 066209. [Google Scholar] [CrossRef] [PubMed]
- Maleki, M.; Habibi, M.; Golestanian, R.; Ribe, N.M.; Bonn, D. Liquid rope coiling on a solid surface. Phys. Rev. Lett. 2004, 93, 214502. [Google Scholar] [CrossRef] [PubMed]
- Huppert, H.E. The intrusion of fluid mechanics into geology. J. Fluid Mech. 1986, 173, 557–594. [Google Scholar] [CrossRef]
- Mossel, B.; Bhandari, B.; Arcy, B.D.; Caffin, N. Determination of Viscosity of Some Australian Honeys Based on Composition. Int. J. Food Prop. 2003, 6, 87–97. [Google Scholar] [CrossRef]
- Cruickshank, J.O. Viscous Fluid Buckling: A Theoretical and Experimental Analysis with Extensions to General Fluid Stability. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 1980. [Google Scholar]
- Ribe, N.M. Liquid rope coiling: A synoptic view. J. Fluid Mech. 2017, 812, R2. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Data | 6.65 | 51.5 |
| Habibi, 2006 | 3.45 | 13.9 |
| Cruickshank, 1980 | 5.52 | 5.02 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mier, F.A.; Bhakta, R.; Castano, N.; Garcia, J.; Hargather, M.J. Experimental Measurement of Steady and Transient Liquid Coiling with High-Speed Video and Digital Image Processing. Fluids 2018, 3, 107. https://doi.org/10.3390/fluids3040107
Mier FA, Bhakta R, Castano N, Garcia J, Hargather MJ. Experimental Measurement of Steady and Transient Liquid Coiling with High-Speed Video and Digital Image Processing. Fluids. 2018; 3(4):107. https://doi.org/10.3390/fluids3040107
Chicago/Turabian StyleMier, Frank Austin, Raj Bhakta, Nicolas Castano, John Garcia, and Michael J. Hargather. 2018. "Experimental Measurement of Steady and Transient Liquid Coiling with High-Speed Video and Digital Image Processing" Fluids 3, no. 4: 107. https://doi.org/10.3390/fluids3040107
APA StyleMier, F. A., Bhakta, R., Castano, N., Garcia, J., & Hargather, M. J. (2018). Experimental Measurement of Steady and Transient Liquid Coiling with High-Speed Video and Digital Image Processing. Fluids, 3(4), 107. https://doi.org/10.3390/fluids3040107