1. Introduction
The objective of this manuscript is to gain insight into the fundamental physics of oceanic western boundary currents and their layered laboratory models. Specifically, we will explore the asymmetry observed in laboratory results between the poleward and equatorward flowing boundary currents corresponding to the subtropical and subpolar gyre regions. The theoretical analysis of western boundary currents (WBCs) originated with the seminal works of Prandtl [
1], Blasius [
2], Stommel [
3], Munk [
4], and Schlichting [
5] developing the boundary layer approach. For the ocean, the boundary layer approach is justified by the relative narrowness of the current systems such as the Gulf Stream and Kuroshio (≈100 km) compared to the scale of the subtropical gyre circulation (≈2000–10,000 km). The single fixed depth layer, depth-averaged, or barotropic case is well established with the fundamental balances resulting in the familiar Stommel, Munk, and inertial lateral boundary layers (e.g., Pedlosky [
6]). A simultaneous combination of lateral friction and inertia was considered in a series of works by Il’in and Kamenkovich [
7,
8]. Kamenkovich [
9] considered this as well and obtained an explicit analytic solution using a functional relationship for a special class of boundary current transport with parabolic dependence,
, on latitude
. In contrast, a more common sinusoidal dependence
was used in later studies by Ierley and Ruehr [
10] and Mallier [
11] using semi-analytic/numerical methods.
The effect of a varying layer thickness (1.5-layer model and associated nonlinearity) was considered by Charney [
12] assuming a purely inviscid inertial western boundary current. Charney’s approach was to derive relationships between the Bernoulli function, potential vorticity, and stream function which are specified outside the boundary layer (in the ocean interior). These far-field conditions could then be functionally mapped into the boundary region to obtain an inviscid approximation to the inertial western boundary current structure. Charney’s method was extended by Huang [
13] in a 2.5-layer inviscid model (consisting of two moving fluid layers with the third layer being much deeper and stagnant).
A 1.5-layer solution will be considered here but we seek to remove the inviscid restriction, which will extend the earlier analysis of Kuehl and Sheremet [
14,
15,
16]. It should be noted that this work considers a vertical wall with no sloping topography. Thus, the bottom pressure torque concept of Hughes [
17] and Hughes and Cuevas [
18]) is not active. Other researchers, such as Pierini et al. [
19,
20] on a 5 m rotating platform, often used the vertical wall approximation, thus considering large scale motions. The role of sloping bathymetry on the boundary current structure was studied by Salmon [
21] using a 2-layer approach. Nonetheless, the observational study of Beal and Bryden [
22] suggests that a vertical wall, layered western boundary current formulation is relevant to the Agulhas current (around 32
S).
This manuscript is organized as follows. In
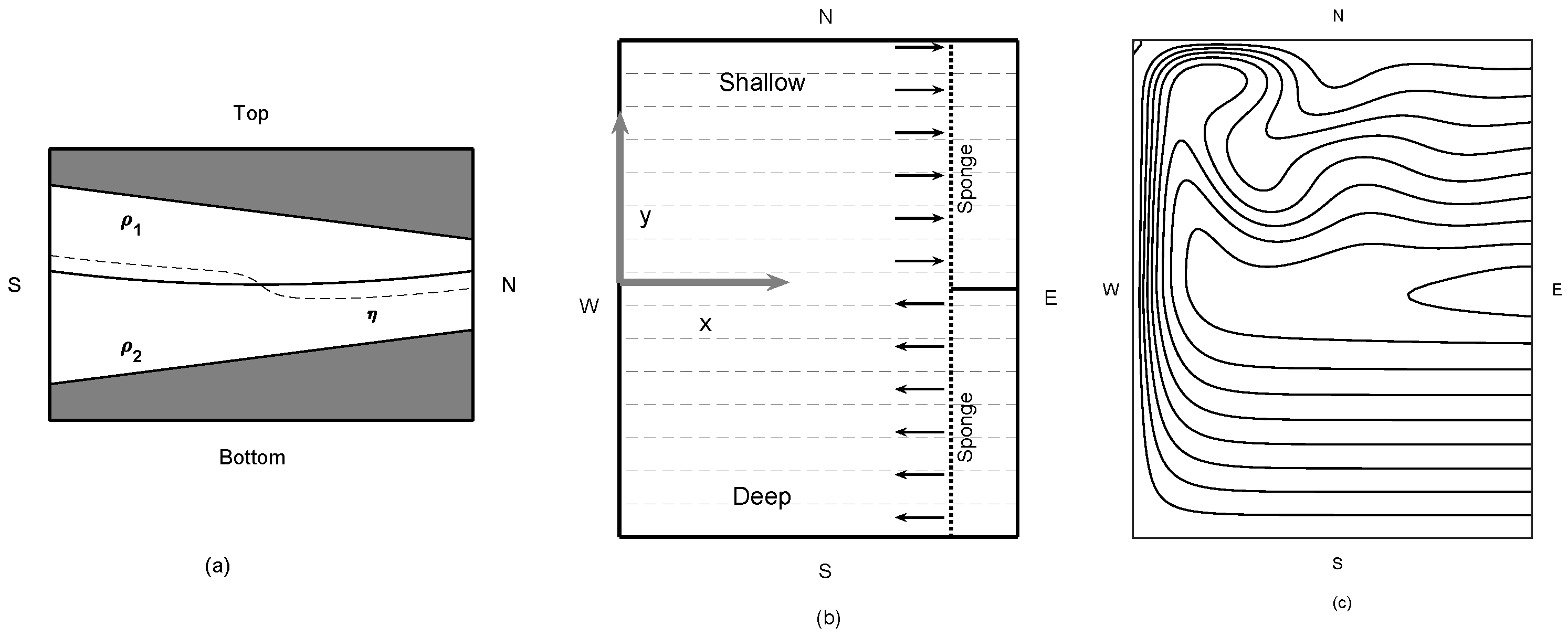
Section 2, we discuss the problem formulation for a 1.5-layer western boundary current in the context of a rotating table laboratory experiment. These experiments were carried out in Kuehl and Sheremet [
16] and resulted in WBCs with north–south flowing asymmetry, which could not be described with simple theory. In
Section 3, the mathematical formulation of the problem is described. We derive the relevant vorticity equation which describes the structure function of an upper-layer intensified and accelerating western boundary current, and solve it numerically. The numerical boundary current profiles are then compared with experimental measurements.
Section 5 is a brief summary of the results.
3. Mathematical Formulation
In this work, we will consider a 1.5-layer approximation: the flow is concentrated in the upper layer, the lower-layer flow is assumed to be negligible because there is no pumping and the geostrophic contours (lines of
) are blocked. We start with the shallow water equations assuming that the velocity field
is depth independent. This is primarily a consequence of the rapid rotation of the experimental platform which results in a small Rossby number
, where
is a typical velocity scale. The momentum equations and continuity equation for the single active fluid layer are:
The layer identifying subscripts have been dropped as Equationreds (
1) are valid for either layer. Details can be found in Pedlosky [
6] or, in particular, the Cushman–Roisin [
23] chapter on layered systems. However, unlike the traditional geostrophic approximation, we admit the finite depth layer changes. More explicitly, Kuehl and Sheremet [
16] provides the coupled two-layer system set of equations. Equations (
1) for the upper active layer are the result of taking the 1.5-layer limit.
In Equations (
1):
are the cross-shore and alongshore velocities, respectively, (in the context of the western boundary current),
h is the depth of the fluid layer,
is kinetic energy per unit mass,
is the vorticity,
is the lateral viscosity,
f is the Coriolis parameter, and
p is the pressure anomaly relative to no motion, divided by the fluid density (
). As this work considers layered systems,
p can also be interpreted as the Montgomery Potential. Either way,
is obtained, where
is the reduced gravity, and
. The Rayleigh drag terms
are assumed to be uniformly distributed over the fluid layer. Our intention is to consider steady state solutions, but we included the temporal derivative terms to remind the reader of the broader context.
Taking the curl of the momentum equations, defining the transport function (
) through
and
to satisfy the steady continuity equation and introducing the potential vorticity
gives us the steady state vorticity advection–diffusion equation:
where
J is the Jacobian operator. The Rayleigh drag originates from the Ekman flux divergence due to the top/bottom and interfacial friction effects, their combined result can be expressed as
, where
is the Ekman layer depth.
In order to solve the problem, we also need a relationship between the transport function
and the pressure or the layer thickness anomaly
. In the classical quasigeostrophic approximation (Pedlosky [
6]) it is assumed that
is proportinal to
which is valid only for small changes of the layer thickness. We do not use this restriction. Instead, we will use a boundary layer approximation and a semi-geostrophic balance: the geostrophic balance only perpendicular to the boundary, while along the bondary the nonlinear ageostrophic accelerations are retained in the potential vorticity advection-diffusion Equation (
2). In the western boundary current, the
x-scales of motion are much smaller than
y-scales, therefore the cross-flow momentum equation is simplified to a geostrophic balance
Thus we can integrate along
x in order to express the layer thickness
where
and
are the meridional distributions of layer thickness and transport function outside of the western boundary current. Since we are focused on the western boundary current region, without loss of generality, we can assume that
H is independent of
x,
, where
the upper layer value. The distributions
and
are essentially the same as at the eastern boundary, are established at the sponges by pumping fluid, and are in a geostrophic zonal flow balance. For example, for the inflow half
:
Similar equtions hold for the outflow half
. The total volume inflow
is specified by pumping and must be the same as the outflow
. We also need to specify that the anomaly
averaged over the whole basin is zero or specify a reference value, for example,
. In our case, both of these conditions are very close. Thus, explicit expressions for
are
and then explicit expression for
can be calculated from (
5). The uniform inflow
and outflow
velocities are determined from the quadratic Equation (
5), but are very close to the linear estimates
and
.
4. Solution
In order to solve numerically, the nonlinear steady flow problem is cast into a nondimensional form by scaling:
by
L;
h,
H and
by
;
u and
v by
;
by
;
by
Q;
q by
with
being the topographic
-effect. In nondimensional form the problem reads as follows
where
,
. The nondimensional parameter
is the relative meridional variation of depth over the basin due to the sloping top lid; and
is the relative effect of the paraboloidal shape of the fluid interface in a solid body rotation. The domain is
,
,
. The kinematic conditions for solving the elliptic equation are
along all boundaries, except at the eastern boundary
where inflow/outflow is prescribed
, with
varying between 0 and 1. The dynamical conditions are no-slip:
at the western
and eastern
boundaries and no-stress
at the southern
and northern
boundaries. The arising parameters
,
with
and
are the nondimensional inertial, Stommel, and Munk boundary layer thicknesses as in the standard quasigeostrophic theory. Lastly, a nondimensional parameter
appears in the relationship between the flow function and the interface displacement
where
is the deformation radius. The expression under the square root may become negative when
is finite. In this case, the layer thickness may vanish and the equations will break down.
The numerical problem is solved using standard finite differences on a rectangular grid dividing the domain into
cells. The parameters
and
represent the dissipative effects, while
characterizes the nonlinearity, the strength of pumping. For small boundary layer Reynolds numbers
simple explicit iterations with treating the nonlinear terms as perturbations work well, but for the moderate
R the iterations fail to converge. In this case Newton’s method has be to employed for finding steady solutions. We consider a state vector
consisting of values at all grid nodes including the boundaries, the size of this vector is
. Substituting an initial guess
into (
7) results in the vector of residuals
at each grid node of the same size
M. In order to find
that brings residual closer to vanishing
, we need to calculate the Jacobian matrix
(of size
which depends on
) of all first-order partial derivatives of
F with respect to
X and then solve the linear sytem
The iterations then continue until the residual completely vanishes. The elements of the Jacobian matrix can be calculated analytically by considering the variational problem corresponding to (
7).
where
, where
according to (
8). The variations of the boundary conditions are trivial. It should be noted that the elements of the Jacobian matrix do not have to be calculated exactly. We may ignore the variation of
h in the bottom drag term and in the elliptic equation. As long as the iterations converge and the residual
vanishes, we get an exact solution to the original problem (
7). Finite difference approximations result in a sparse banded type of
, and the grids of size upto
can be solved on a computer with 24 GiB of operational memory.
Numerical Experimental Comparison
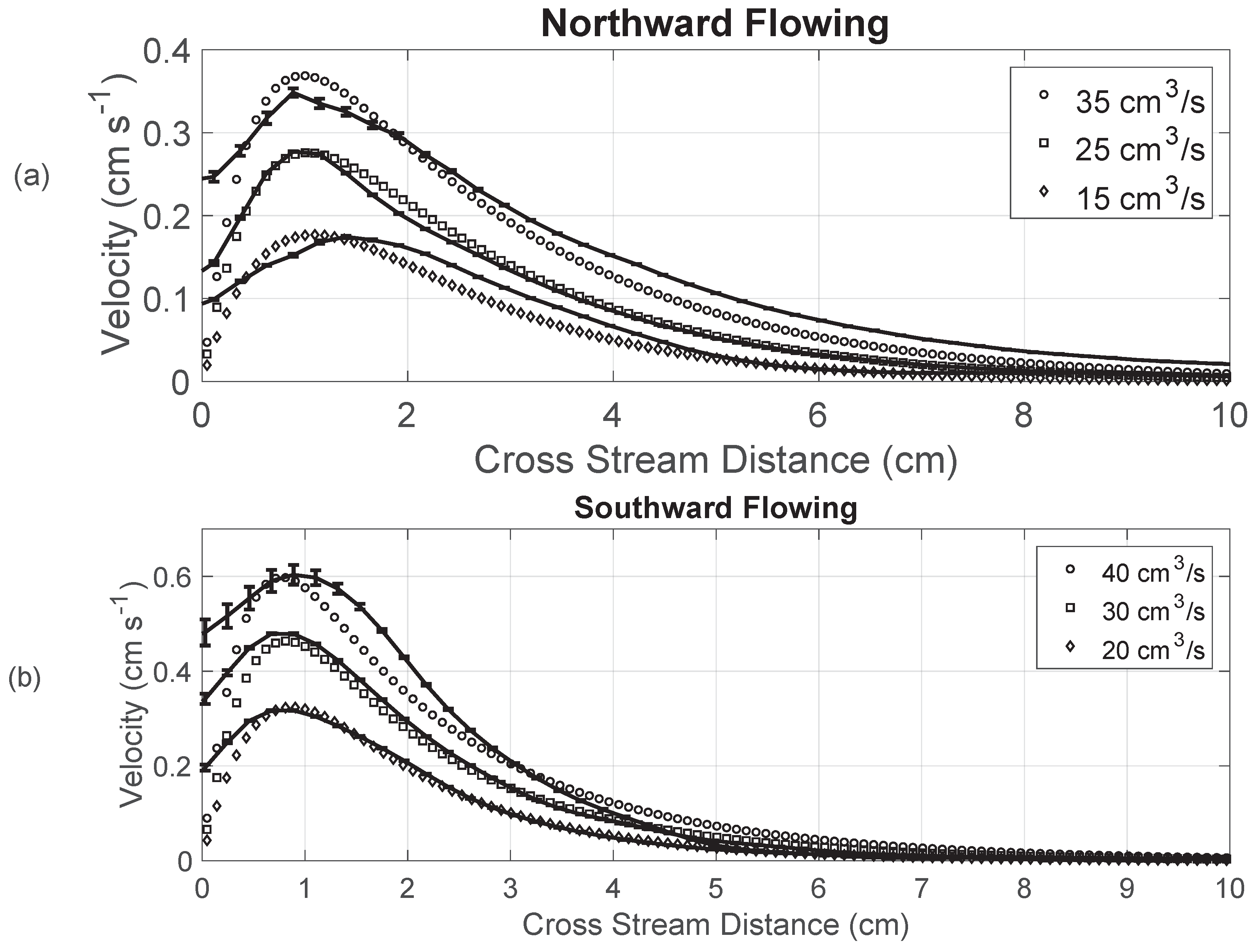
Figure 2 shows the numerical-experimental comparison between northward (top) and southward (bottom) flowing boundary currents. For all cases
cm,
, and
. Experimental profiles of northward flowing currents with total transports of 35, 25 and 15 cm
/s (
and
; respectively) are found to be in good agreement with numerical calculations. Experimental profiles of southward flowing currents with total transports of 40, 30 and 20 cm
/s (
and
; respectively) are also found to be in good agreement with numerical calculations. While the agreement between numerical and experimental profiles is, in general, good, there are noticeable differences. These difference are primarily due to the non-ideal aspects of the experimental setup. For instance, in
Figure 1 (panel b), the slight bowing of the isobaths, due to a parabolic layer interface which is indicated in the left panel, is not accounted for. While the numerical solutions account for the parabolic interface, a slight boundary current is formed along the southern tank wall in the experiments, due to the intersection of isobaths with that wall. Thus, the northward flowing boundary current comparison is less accurate than the southward flowing boundary current. Also, velocity profiles very near to the wall suffered from enhanced reflection of the laser light at the wall. This resulted in reduced ability of the experimental profiles to accurately resolve near wall velocity structure. However, in general there is good agreement in both velocity magnitude and structure between the numerical and experimental results. In addition, the numerical results agree with the experimental trend of northward flowing currents broadening with increasing transport compared to southward flowing currents that tend to intensify rather than broaden with increasing transport.



{kind=link}
{kind=link}

