1. Introduction
The shallow water equations (SWE) are applicable to a wide range of practical problems, ranging from ocean dynamics to flows due to the collapse of hydro dams. Because analytical solutions of the SWE are only available in very few simple and ideal situations, it is important to develop robust and accurate numerical methods to solve SWE in more realistic engineering applications. Extensive research on numerical models for SWE has been developed for a long time, and can generally be classified into three types, i.e., the finite element method [
1], the finite difference method [
2], or the finite volume method [
3].
In principle, two challenges arise when developing a numerical approximation of SWE, i.e., when discontinuous solutions are present during wave-breaking and when dealing with wet–dry boundary during run-up. Many efforts have been made to overcome these problems. Among the three methods, the most popular is the finite volume method, see for instance [
4,
5,
6,
7,
8,
9,
10]. Most of the above researches aim at developing a numerical 2d-SWE model that can capture shock wave solutions while maintaining the conserved quantity of the hyperbolic SWE system. In addition, efforts have been made to obtain an accurate solution to the Riemann problems [
11,
12]. Efforts to deal with wet–dry interfaces were also discussed extensively when developing numerical models for SWE, see [
13,
14]. Among these methods is the so-called slot-technique applied to the Boussinesq-type model [
15], where an artificial porous beach is used to damp the numerical oscillation. Moreover, there is the so-called thin film method, where a very thin water covers all dry areas, so that no special treatment is needed to resolve the movement of the shoreline. The review of wet–dry techniques adopted in shallow water equations is discussed in [
16].
The numerical scheme proposed here is referred to as the momentum conserving staggered grid (MCS-2d) scheme. The method is based upon the classical leapfrog method for SWE, which is solved on the computational staggered grid domain. Discretization of the nonlinear terms are based on a conservative principle; i.e., momentum conserving approximation for the advection terms and upwind for the non-linear term in mass conservation. In this way, we do not need to apply the Riemann solver in the flux calculation, and therefore the numerical computation of MCS-2d is relatively cheap.
Stelling and Duijnmeijer, (2003) [
17] proposed an extension of the Arakawa staggered scheme [
18], which holds for rapidly varied flows. Unlike the Arakawa scheme, which applies global conservation of energy and vorticity, the conservative scheme proposed by [
17] allows the conservation of energy or momentum locally. Detailed discussion of the situation that is appropriate for the energy conserving scheme or the momentum conserving scheme can be found in [
17]. In this paper, we focus only on the momentum conserving scheme and conduct various simulations for validation purposes. It should be noted that the numerical scheme proposed here preserves mass and momentum at discrete level, which turns out to be a key element in its ability to automatically capture and predict hydraulic jumps and bores, see [
17,
19].
In addition, under the stability condition, this scheme is non-dissipative and therefore it does not admit any numerical damping error. In this paper, we show the capability of the MCS-2d scheme to simulate various benchmark tests, as well as its accuracy in computing the moving shoreline. Three of them are benchmark tests suggested by National Oceanic and Atmospheric Administration (NOAA) agency [
20]. The simulation of the benchmark test solution of Zelt 1986 [
21] is an important result, as this simulation requires the application of boundary conditions capable of generating and absorbing at the same time, i.e., a transparent offshore boundary. Here, we implement the embedded influx [
22], which allows this to be done. In this paper we succeed in calculating moving shoreline, as well as the maximum run-up height along the closed bay, which is in good agreement with the numerical results of [
23].
The organization of this paper is as follows. We start with a discussion and derivation of the numerical model called the momentum conserving staggered grid (MCS-2d) scheme, as well as the embedded wave influx algorithm which is important for the construction of transparent wave influx. In
Section 3, the scheme is validated using the existing analytical solution. Benchmarking of the scheme is conducted using Thacker 1981 analytical solutions [
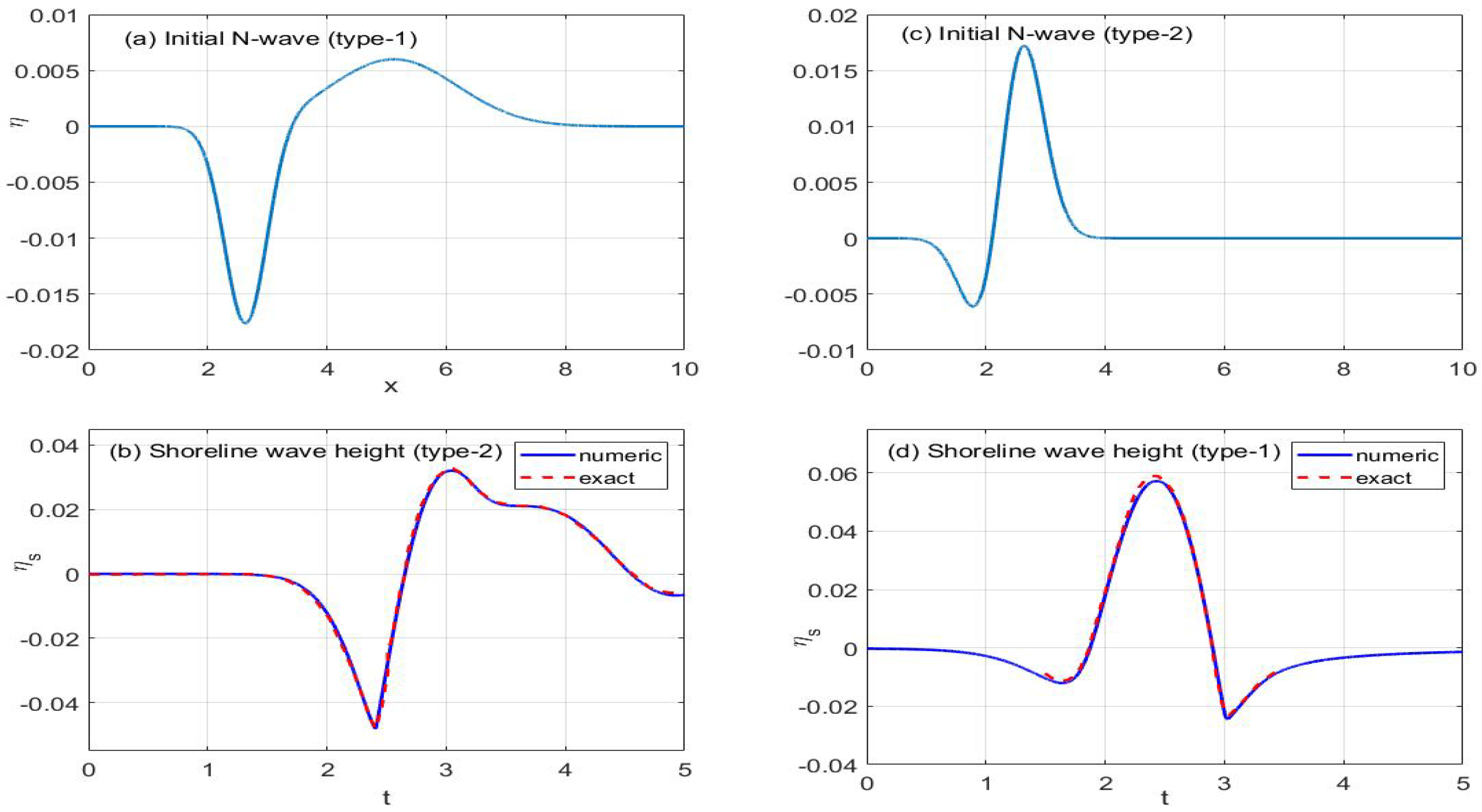
24], i.e., fluid motion in a parabolic basin. Furthermore, the execution of Carrier Greenspan N-wave simulation shows that the MCS-2d scheme correctly calculates the moving shoreline. In
Section 4, another SWE solver of [
23] is used as numerical benchmarking. In this case, a solitary hump was propagated towards a closed bay, producing an alternating run-up and run down in the closed bay. In
Section 5, we carried out laboratory benchmarking. The first is a solitary wave run-up onto a conical island. Simulations using a solitary wave of three different amplitudes were conducted to be compared with the experimental data from Briggs 1995 [
25]. The last benchmark test was the tsunami run-up to a complex three-dimensional beach, the model of Monai Valley. By conducting validation with several benchmark tests, we demonstrate the robustness and capability of the MCS-2d scheme in predicting accurate results for various tsunami-related simulations.
2. Mathematical Model and the Momentum Conserving Staggered Grid Scheme
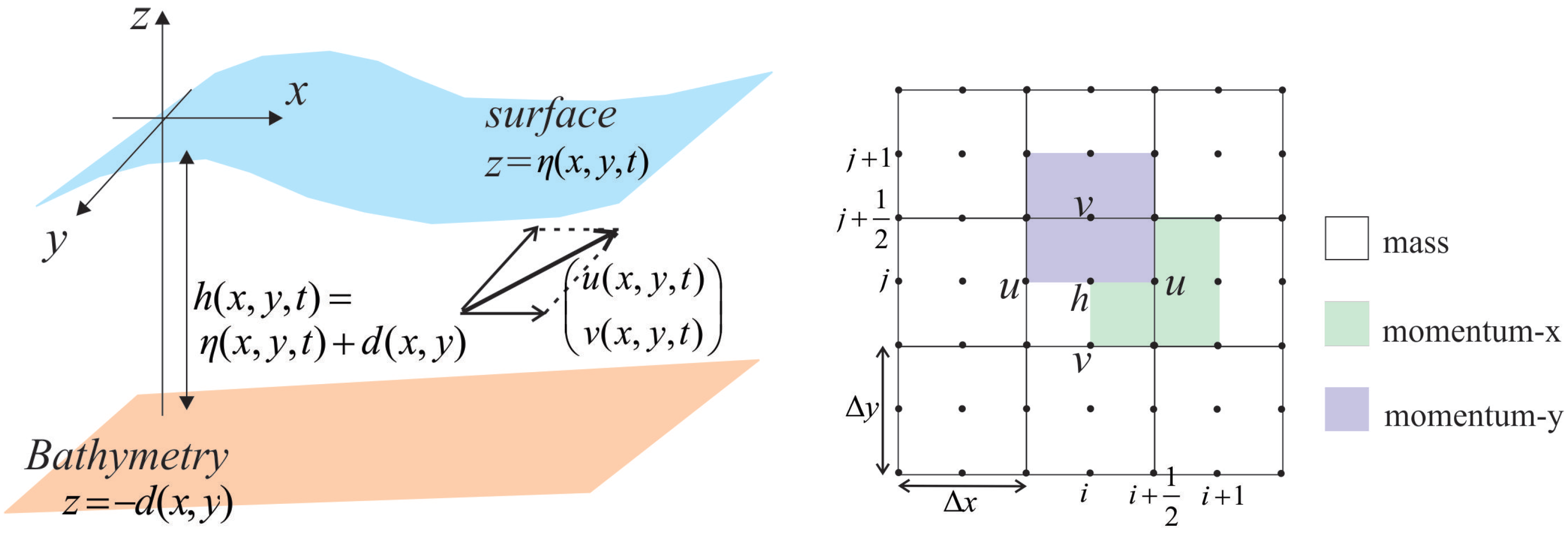
We start the discussion by presenting the mathematical model that will be used in this study. Consider a layer of fluid bounded above by the free surface
, and below by the topography
, see
Figure 1 (left). Under the influence of gravity as a means of restoring force, the motion of the free surface is governed by the 2-dimensional shallow water equations (SWE) written in conservative form as follows
In the above equations
denote the total water depth, and
the velocity of fluid particles. Equation (
1) is the conservation of mass, while (
2) and (
3) are the conservation of momentum. Three dependent variables are
, all are functions of time
t and the spatial coordinates
. The right hand side terms
and
are the bed slope terms, in which fluid density is normalized to one. In the above formulation, friction effects are neglected.
The widely known alternative form of SWE, but written in a non-conservative form, is as follows
The SWE (
4)–(
6) are equivalent to their conservative counterparts (
1)–(
3), and this can be explained as follows; Equation (
5) can be obtained from (
2) after some simple algebraic manipulation below
When (
1) is used to replace
in (
8), and after simplification and division by
h, Equation (
5) is obtained. Moreover, Equation (
6) is obtained from (
2) by using a similar step. From the above derivation, we can extract relations between the advection terms with the momentum
and
, defined as
and
, respectively, and those are
Relationships (
9) and (
10) turn out to be an important element for the discretization of the advection terms, which will be discussed in the next subsection.
2.1. Momentum Conserving Staggered Grid Scheme
In this section, we discuss about the numerical approximation for the 2-dimensional SWE (
4)–(
6). The approximation is applied to the 2-dimensional staggered grid, also known as the Arakawa-C grid [
18], see
Figure 1 (right). Let
and
denote the spatial discretization in
x and
y direction, respectively. A semi discrete form of the mass conservation (
4) at the mass cell centered at
is as follows
with
and
are calculated using the following upwind approximation
The momentum balance (
5) is approximated at the momentum
cell, centered at
, whereas Equation (
6) is approximated at the momentum
cell, centered at
, see
Figure 1 (right). The spatial discrete form of (
5) and (
6) read as
Whereas the approximation for the advection terms
,
,
,
are the corresponding discrete Equations (
9) and (
10), respectively. When the flow direction is positive, the approximation formula for the advection terms are as follows
where the following notations are defined according to the conservation momentum approximation as
and all other values are defined accordingly. For negative flow directions, formulas are analogous, see [
17] for details. The way to approximate the advection terms (
15) and (
16) turns out to be very important, in Stelling and Duijnmeijer [
17] this approximation is called the momentum conserving scheme. To be precise, Stelling and Duijnmeijer [
17] discuss two possibilities for the approximation of the advection terms; an approximation which preserves momentum or energy, as well as discussions on which cases are appropriate for a certain approximation. In this paper, we restrict to the momentum conserving approximation, i.e the approximate Equations (
11)–(
14) with the momentum conserving approximation applied to all the advection terms, henceforth the resulting numerical model is called the momentum conserving staggered grid scheme, abbreviated as the MCS-2d scheme.
For time integration we use the combination of forward time approximation for (
11), and backward time approximation for (
13) and (
14), to yield an explicit scheme. Let the Courant number be
, the sufficient condition for the stability of the linear scheme is
. As a rule of thumb, when dealing with the full nonlinear SWE, a stability condition of
is normally appropriate. It should be noted that under stability, the MCS-2d scheme is also non-dissipative, a property derived for the 1-dimensional counterpart by [
19]. To this end, the stable MCS-2d scheme is free from numerical damping errors. Various simulations of shallow flow benchmark tests will be presented in the following sections, some of which involve hydraulic jumps. It should be noted that the MCS-2d scheme as a momentum preserving scheme can automatically capture shock wave solutions [
17]. In addition, the MCS-2d scheme preserves mass and momentum at a discrete level, a key property so that numerical models can correctly predict hydraulic jumps and bores.
2.2. Thin-Film Method for the Wet–Dry Procedure
For simulation which involves dry areas, and also to simulate moving shoreline, a relatively simple wet–dry procedure should be adopted. In order to avoid instability, we must first apply the so called thin-layer technique, which is as follows. Suppose
is a small positive number. In the dry area, say if the total water depth is less than
, the water depth is replaced by a thin-layer of water with depth
, explicitly
In most cases the threshold number of
is appropriate in many cases. In addition, a simple wet–dry algorithm [
17] is used, i.e.,
u is calculated using (
13) only when the corresponding momentum
cell is wet, otherwise it is given a zero value. Similarly,
v is calculated using (
14) only when the corresponding momentum
cell is wet, and otherwise it is zero. To be precise, the wet condition here means that water thickness of the corresponding cell is larger then the previously chosen thin-layer water thickness
. The performance of this wet–dry technique was proposed and validated by Stelling et al., 1986 [
26]; see also [
27].
2.3. Embedded Wave Influx
For several simulations carried out in this paper, it is important to have a transparent boundary, i.e., a boundary to mimic an offshore boundary. Such a boundary will allow the right running wave to enter the domain, while at the same time allowing the left running wave to leave the domain. This is not a simple task. It has been discussed by [
22] that such a boundary can be obtained by implementing an embedded wave influx. Here, we will recall the algorithm for the sake of clarity. Consider the wave model (
4)–(
6) on the computational domain
,
. In order to have an offshore boundary along
, three steps should be conducted. First, we extend the computational domain into
,
. Second, implement the simple radiation boundary along
, and third, implement the embedded boundary along
. The embedded influx procedure is in essence, adding a force function
to the right hand side of mass-conservation (
4). This function is related to the targeted signal via their Fourier transform
If we restrict to generating a wave signal along
, that can be achieved by choosing
a Dirac delta function, that has a Fourier transform pair
. Let
be the signal to be generated, by applying spatial Fourier transform to the linear Equations (
4)–(
6), and factorizing the second order wave equation, one can obtain
In (
21),
is the inverse of dispersion relation
. Equating (
20) with (
21), we obtain
, with
is the group velocity. For a non-dispersive model like SWE, the group velocity is just the wave celerity
. In summary, the embedded mechanism for generating a wave influx
at
using the SWE as dynamic is by giving (
4) an additional force function
. This force function will embed a wave
, which will propagate to the right and to the left with speed
. By implementing it along
,
the right running wave will enter the computational domain
,
, whereas the left running wave will propagates to the left
,
and later be absorbed at
. Later on, when left running wave appears in the computational domain (due to reflection for instance), it will pass through
freely, whereas at the same time the right running wave will pass through
as well. Note that this is possible because the homogeneous part of wave dynamic remains the original SWE. This transparent offshore boundary will be used for two benchmark simulations presented later, those are; the solitary wave run-up on a sloping bay [
21], the conical island case [
25], and the Monai Valley case [
28].
On the basis of all the above considerations, the advantage of the MCS-2d scheme is explicit and non-dissipative. Moreover, the conservative property of the scheme enables shock wave solutions to be captured automatically. The efficiency and robustness of the MCS-2d scheme are demonstrated by the various simulations of benchmark tests recommended by NOAA [
20].
4. Numerical Model Benchmarking
In this section we performed the 2-d run-up test of a solitary hump that was first performed by Zelt, 1986 [
21], and later by [
12,
32]. In this test case, the bathymetry is a flat bottom that is connected to a closed bay, as follows
with
,
. Here
represents the offshore constant depth, and
L the half-width of the bay. In
Figure 6 the bay model (
35) is plotted, together with the still water level
m.
As a wave influx, we use the solitary hump profile with amplitude
, using the explicit formula
There is no analytical solution for this case, here our numerical simulation is being tested against another shallow water codes of Özkan-Haller and Kirby, 1997 [
23]. For our simulation, the bathymetry (
35) is used with
m, applied to a computational domain
m, and the lateral dimension
, with
m. Hard wall boundaries were applied along both lateral boundaries,
and
. Parameters for simulation are
, gravity acceleration
m/s
2, and the spatial grid size
m, and
s. For the wet–dry procedure, we use a threshold number of
m.
The solitary wave (
36) was introduced into the computational domain using the embedded method [
22], as we mentioned earlier in
Section 2.3. Implementation of this method requires that the computational domain was first extended from 0 m
m to
m
m. This embedded influx was applied along
m (shown in
Figure 6 as the red dashed line) along with an absorbing boundary at
m. In this way, we can obtain a transparent boundary at
m, which allows the right running wave to enter the domain, while at the same time allowing the left running wave to leave the domain. This mechanism is important to ensure that the solitary hump that enters the bay, got reflected and propagated back to the left, leaving the domain via the left boundary
m. In [
23,
32], this mechanism is referred to as the absorbing-generating offshore boundary.
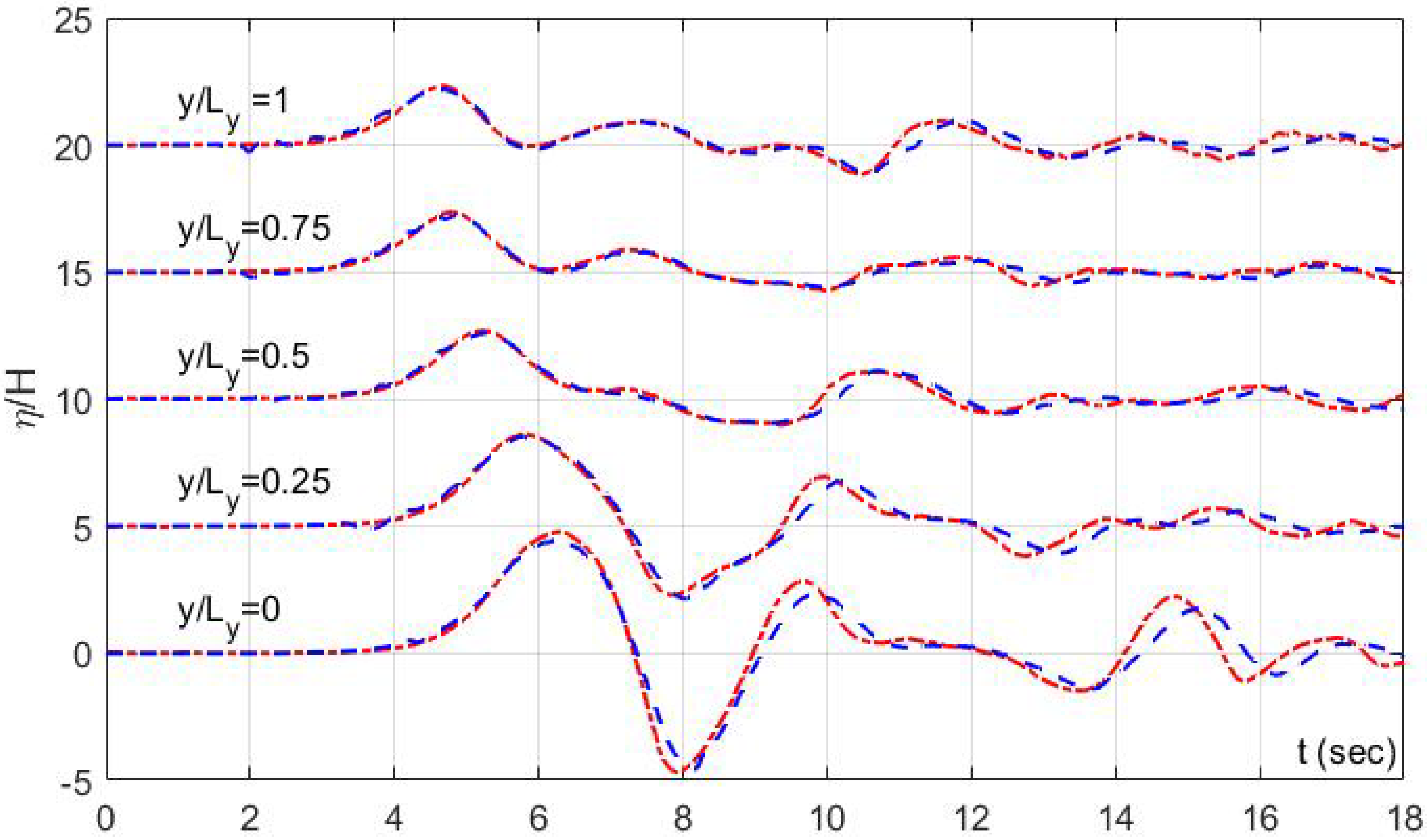
Simulation shows that the wave enters the domain and generates up and down motion, particularly in the closed bay area. The simulation results are compared with the numerical results by [
23]. In
Figure 7, time series of normalized waves run-up are compared at the middle of the bay
, as well as at several cross-sections
. It is shown that the highest run-up and run-down were achieved in the middle of the bay, and a little less were achieved along the other cross-sections, with the least run-up being reached along the lateral borders at
. The numerical results in all five cross-sections show a good resemblance to the numerical results. Further comparison was made with the maximum wave height along the shoreline
on the bay beach, see
Figure 6. As shown in that figure, the calculated maximum run-up and minimum run-down, are in satisfactory agreement with the maximum wave height found by [
23].
5. Laboratory Benchmarking
In this section we performed laboratory benchmark tests as recommended for by NOAA [
20], which are (1) a solitary wave run-up on a conical island, and (2) wave run-up onto a complex bathymetry. This solitary wave run-up on a conical island is favorable test case often performed by tsunami modelers, see for example [
32,
33,
34]. In addition, the laboratory data set of solitary wave run-up and run-down by Synolakis, 1987 [
35] is normally used to validate the accuracy of a numerical model in predicting a solitary wave run-up on a sloping beach. However, this has been done by Erwina et al., 2019 [
29] using the 1d version of this MCS-2d scheme. It has been shown that the run-up of solitary wave confirms the experimental data for a wide range of wave heights of
and
, i.e., non-breaking and breaking case, respectively. So, here we go straight to the test case of a solitary wave run-up on a conical island.
5.1. A Solitary Wave Run-Up on a Conical Island
This simulation is based on a laboratory experiment performed at the Coastal Engineering Research Center, Vicksburg, Mississippi, which is motivated by the 1992 Flores Island tsunami. The experiment was conducted in a 30-m-wide, 25-m-long, and 60-cm-deep wave basin with a conical island in the center. The slope of the island is 1:4 and the water depth is
m. This experiment simulates the interaction of solitary wave around conical island. Detail of the experiment can be found in [
25].
Numerical simulation was performed using
m and
s, and the threshold number
m. Here we conduct a simulation, in which the initial soliton of a certain amplitude enters the numerical domain from the left boundary. The surface elevation was recorded at four wave gauge locations WG6, WG9, WG16, and WG22, as shown in
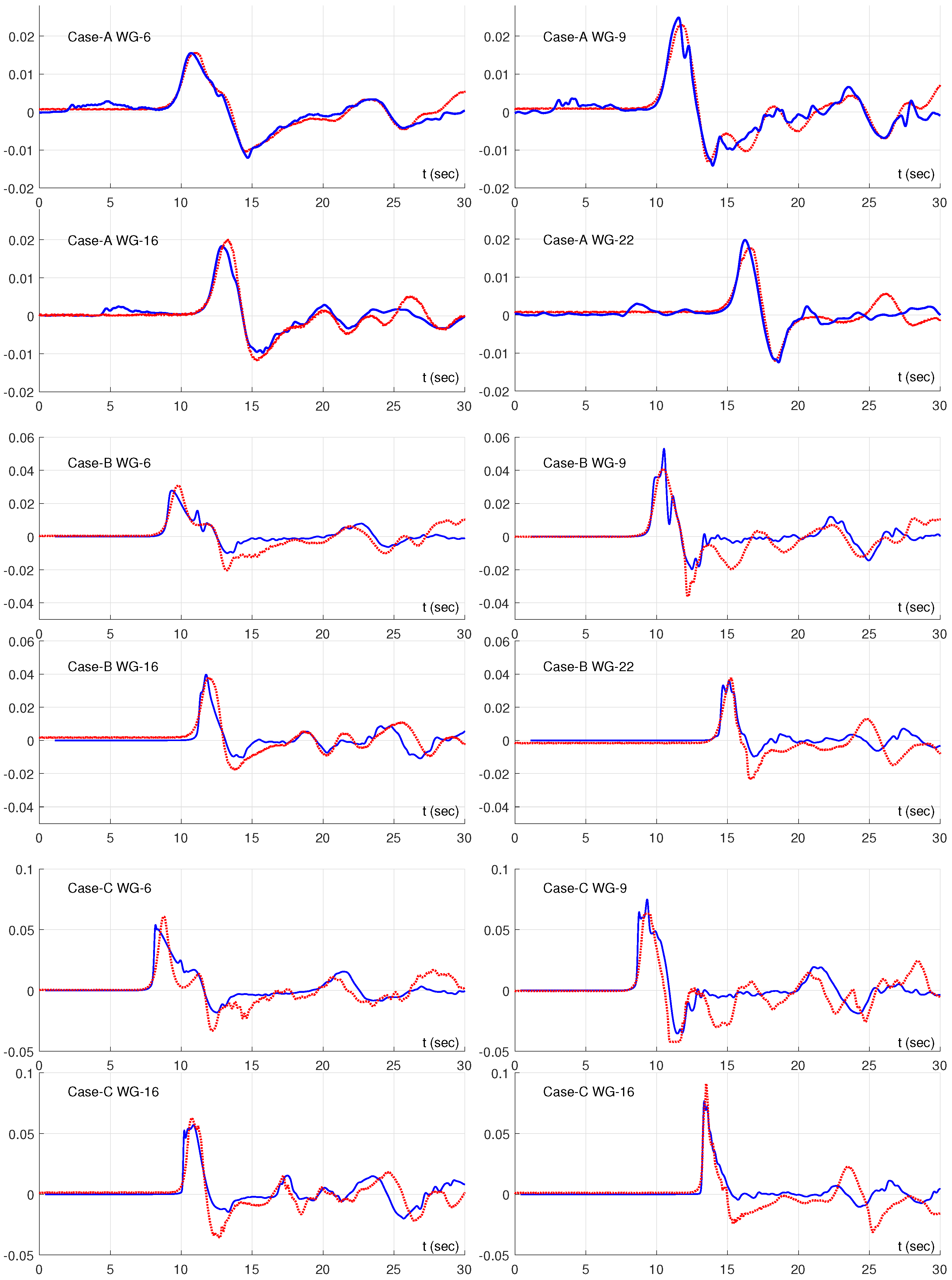
Figure 8. Three wave gauges WG9, WG16, WG22 were located at the initial shoreline surrounding the island, whereas WG6 is located near the front face of the island.
The propagation of soliton at subsequent times are shown in
Figure 9. When the soliton reaches the island, it moves around the perimeter of the island and then moving forward leaving the island. Three cases of solitary wave amplitudes were simulated; case A (
), case B (
), case C (
). During all simulations, wave signal at several wave gauges WG6, WG9, WG16, WG22 were recorded for comparison purposes, and the results are shown in
Figure 9. It is shown that the leading wave run-up can be captured well with our numerical scheme. However, for the secondary depression wave, our numerical result shows less of a depression. But this result is consistent with other run-up model tests [
33,
36].
Moreover, the calculated maximum run-up around the conical island has also been recorded. This maximum run-up measures the highest vertical extend that can be reached by the wave influx. The maximum run-up from numerical calculation is compared with the laboratory data in
Figure 10. The numerical predictions are good around the front of the island, and this holds for all three cases. However, around the back of the island, there is a slight under prediction that could be due to the absence of bottom friction in the numerical runs.
5.2. Wave Run-Up onto a Complex Beach (Monai Valley)
In this section, we do another benchmark test simulation based on experiment [
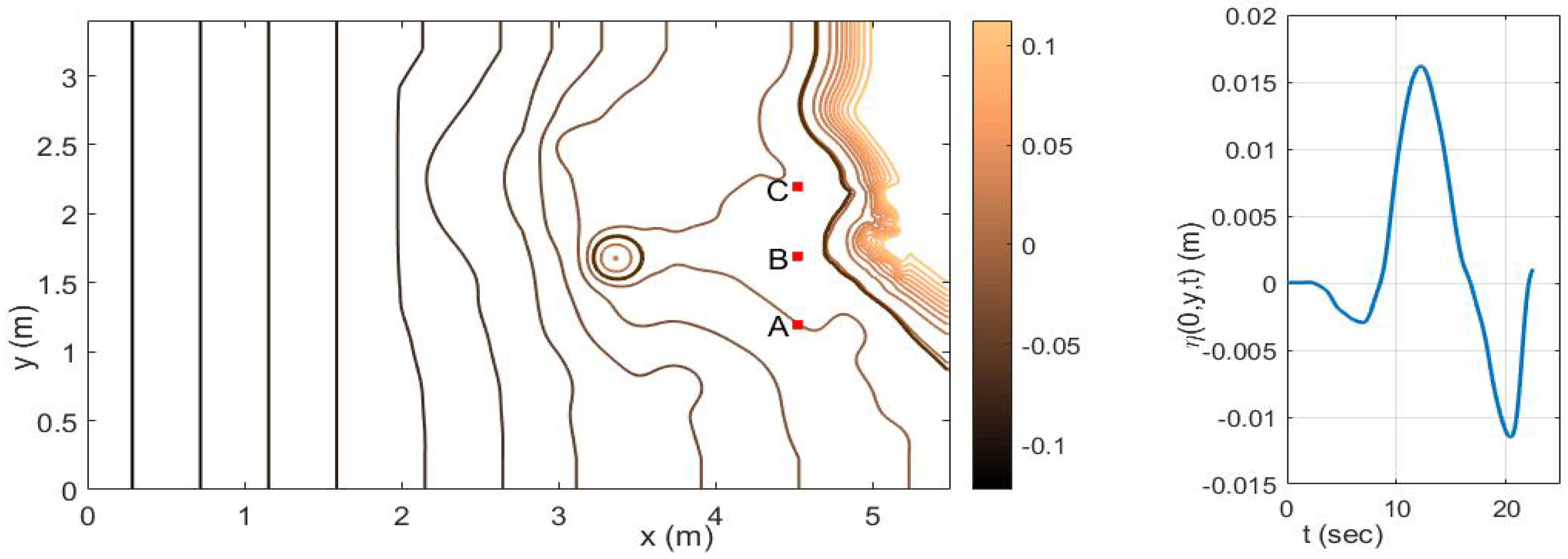
28]. The experiment was conducted at Central Research Institute for Electric Power Industry (CRIEPI), Abiko, Japan. The aim of this experiment is to reproduce the 1993 Hokkaido-Nansei-Oki (HNO) tsunami. The tsunami that struck Okushiri Island, Japan, reached an extreme height of 30 m in a small valley near the Monai village. The laboratory model was built to represent the actual bathymetry of Monai Valley, and is arranged on a scale of 1:400. This is one of the important benchmark tests for tsunami numerical models recommended by NOAA, so all data are disclosed by NOAA.
To test our model, a numerical simulation was performed on a
m computational domain with
m and
s, and a threshold water depth of
m. For bathymetry, we use the Monai Valley model profile as shown in
Figure 11 (left). The lead-depression wave, with height of
cm and a crest of
cm, shown in
Figure 11 (right) is used for the left wave influx
. This wave influx was introduced into the domain using the embedded method [
22].
As time progresses, the wave enters the domain and propagates towards Monai beach, see
Figure 12. The wave reaches the beach at
s and maximum run-up occurs at
s near Monai Valley. Closer observation,
Figure 13 (left) shows the maximum inundated area obtained from numeric, whereas
Figure 13 (right) is form the experiment. As observed, the area of inundation is very well captured by the simulation.
Figure 14 presents the recorded wave signals at three observational points
,
and
. For all comparisons, the main wave is predicted very well by the numerical model. Some discrepancy is observed after 30 s simulation time, which is likely because of reflection from the computational boundary.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}