1. Introduction
Controlling the flow around ground vehicles has been studied extensively for drag reduction purposes, leading to improved efficiency. The combination of these improvements reduces the fuel consumption in ground transportation vehicles, and thus green-house gas emissions associated with them. The wake behind vehicles is a major source of pressure drag [
1], which has motivated the development of many passive and active flow manipulation methods. Examples of passive flow control systems are increasing the surface roughness, vortex generators and porous layers to change the vortical structures in the wake. Uniform or pulsed jet flow and synthetic jets are also used to accelerate the flow away from the body or split the vortical structures in the wake [
2,
3]. Based on previous studies in this field, it is clear that active flow control methods can be efficiently used for reducing the drag force of bluff bodies. For instance, Prakash et al. (2018) [
4] reduced the drag on an Ahmed body by up to
using suction and jet blowing techniques. Dielectric barrier discharge (DBD) actuators are used as an active control method based on this principle. The characteristics of these actuators, such as their applicability on a surface without significant change of geometry, fast time-response, small size and static parts, motivate their applications in a wide range of industries [
5].
DBD actuators can modify the laminar-to-turbulent transition, and reattach separated flows or enhance jet vectoring, at low Reynolds numbers (
, where
L is the body chord,
is the velocity and
is the viscosity). Non-thermal electric discharges can be useful for studying drag reduction, lift enhancement or noise reduction [
6]. DBD actuators reattach the separated flow over the bluff body by increasing the transferred momentum into the boundary layer, which results in a smaller wake [
7,
8]. The performance of an actuators is related to specifications of the dielectric material, the configuration of the upper and encapsulated electrodes and the applied frequency and voltage [
9]. Their impact on momentum in the boundary layer is limited, and therefore they appear to be more efficient in lower freestream velocities, or lower Reynolds numbers [
8]. Consequently, most of the past studies (e.g., Boucinha et al. (2011) [
6], Do et al. (2007) [
7]) have been limited to velocities corresponding to
.
Several recent investigations have focused on different applications of DBD actuators, such as controlling the separated flow around bluff bodies [
7,
10] and turbine and compressor blades [
11]. However, only a few studies have focused on scrutinizing the effectiveness of DBD flow control actuators around cars. Boucinha et al. (2011) [
6] reduced the drag (up to
) by implementing several SDBD actuators in the separated region on the rear slant of the Ahmed body. They also reported that the implementation of several actuators does not bring any advantages in comparison to using one actuator close to the separation line. Khalighi et al. (2016) [
8] achieved a drag reduction of
by implementing the DBD actuators on all four sides of a rounded square, back Ahmed body model. They also showed that, due to the small size, SDBD actuators are more effective at lower Reynolds numbers. Shadmani et al. (2018) [
12] used steady and unsteady actuation to confirm that DBD actuators cannot suppress the separated flow on the rear slant of the Ahmed body at the Reynolds number of
.
Guilmineau et al. (2018) [
13] showed that the Reynolds averaged Navier–Stokes (RANS), detached eddy simulation (DES) and improved delay detached eddy simulation (IDDES) models can successfully simulate the flow field around the Ahmed body with the slant angle of
. However, the experimental results imply that RANS modeling is incapable of predicting the flow features around the Ahmed body with a
slant angle. This may be attributed to the large pressure gradients in the wake of a
slant angle compared to the higher slant angles. The predicted wake regions behind the Ahmed body with RANS, DES and IDES methods are significantly different [
13]. Therefore, we performed experimental tests to verify the accuracy of the computational analysis in predicting the drag coefficient of the Ahmed body with a slant angle of
.
Implementing the actuators at some positions can increase drag due to additional surface roughness. Despite this, there have not been comprehensive studies, to the best of the authors’ knowledge, which focus on the effect of the positions of these actuators on the wall roughness and drag reduction. The main objective of this study was to find the optimum position for an SDBD actuator to achieve the maximum efficiency in controlling flow around the Ahmed body. Thus, the effects of implementing SDBD actuators in five positions at Reynolds numbers of
and
were numerically studied using an Ahmed body with slant angles of
and
. The experiments focuses on the slant angle of
at Reynolds number
. The problem description for the numerical method and experimental setup are discussed in
Section 2 and
Section 3, respectively. The validation of numerical results is presented and discussed in
Section 4, followed by the results in
Section 5. A summary of the main conclusions is provided in
Section 6.
2. Numerical Simulations
The Reynolds averaged Navier–Stokes (RANS) equations are solved in three-dimensions using the SST
model [
13]. Details of the formulation can be found in Menter et al. (1994) [
14]. In sinusoidal-driven DBDs, the boundary layer molecules remain approximately at ambient temperature [
5]. Therefore, the energy equation can be neglected in simulations and only the continuity Equation (
1) and modified momentum Equation (
2) equations are considered.
Here,
is the time-averaged velocity,
is time-averaged pressure,
is the stress tensor and
is air density. Moreover,
represents the amount of momentum produced by DBD actuators. An appropriate turbulence model for the current case study must be able to predict non-equilibrium turbulence due to the existence of large vortex structures, separation and a boundary layer that may evolve rapidly [
15]. Based on Guilmineau et al. (2018) [
13], the shear stress transport (SST)
model was selected for simulations. ANSYS Fluent was used as the based solver for the simulations. Furthermore, the electric field and body force exerted by actuators were calculated using a User Defined Function (UDF) code. The distribution of charge density was considered as a boundary condition on the surface of the Ahmed body.
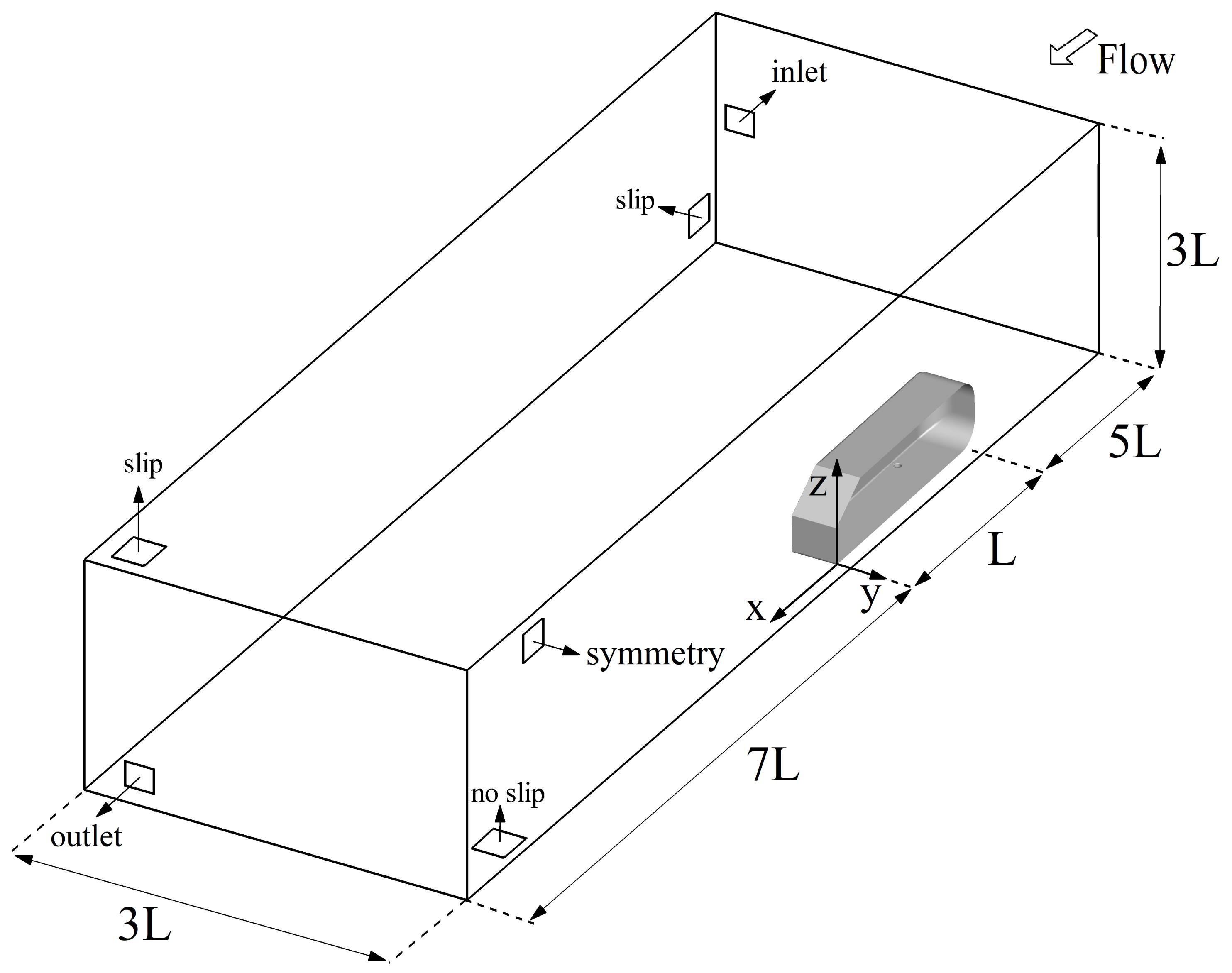
The computational domain in
Figure 1 was designed following Mohammadikalakoo et al. (2020) [
16], such that the upstream and downstream distances from the Ahmed body are
and
, where
L is the model length. The distances of the model from the upper and side surfaces were
. The computational domain shown in
Figure 1 consisted of three subdomains for mesh refinement, such that the grid around the Ahmed body is most refined, and it expands as it gets closer to the boundaries. The mesh refinement facilitates capturing the flow field characteristics on the slant surface, especially the flow separation and reattachment before and after applying the DBD actuators. The spatial and temporal discretizations were both second-order accurate with the central difference scheme used for the former and the backward Euler method employed for the latter. The convergence criteria were based on the maximum residual root-mean-square of
for the momentum equation.
The implications of spatial grid quality was determined using three cases: grid 1, grid 2 and grid 3.
Table 1 shows the drag coefficients for different grids for the Ahmed body with slant angles
and
at a Reynolds number of
. Mesh refinement from grid 2 (
elements) to grid 3 (
elements) had no considerable effect on the drag coefficient, where the variation was less than
. Furthermore,
Figure 2 shows that the difference of streamwise velocity in the wake of the Ahmed body model for grid 2 and grid 3 is less than
. Thus, the mesh in grid 3 is sufficient for accurately capturing the mean drag coefficient of the Ahmed body.
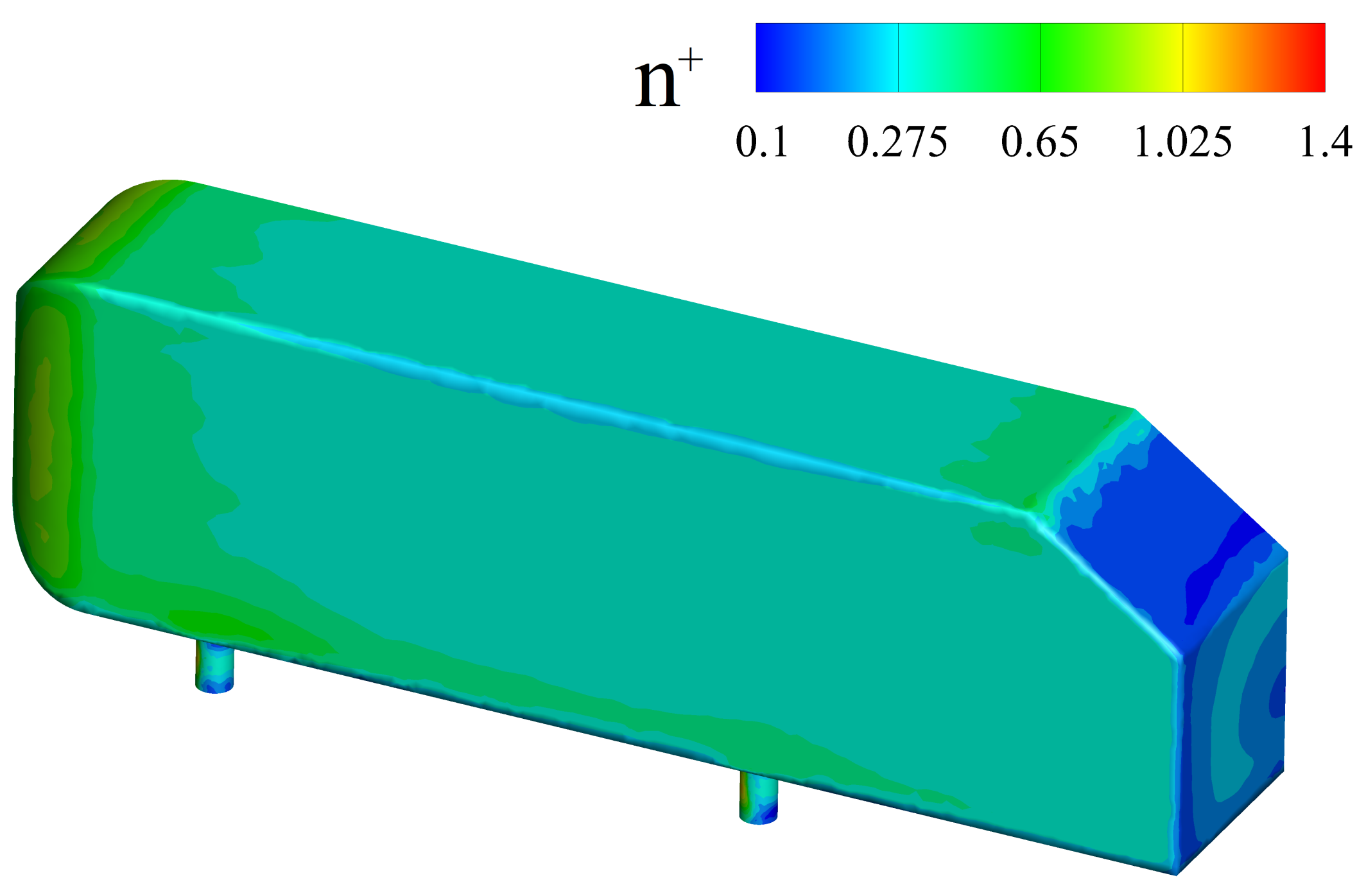
The non-dimensional wall distance (
) near the walls of the model is presented in
Figure 3, which identifies that the average value of
is less than 5. Thus, grid 3 is sufficient for accurately estimating the viscose sublayer [
17].
SDBD Actuator Model
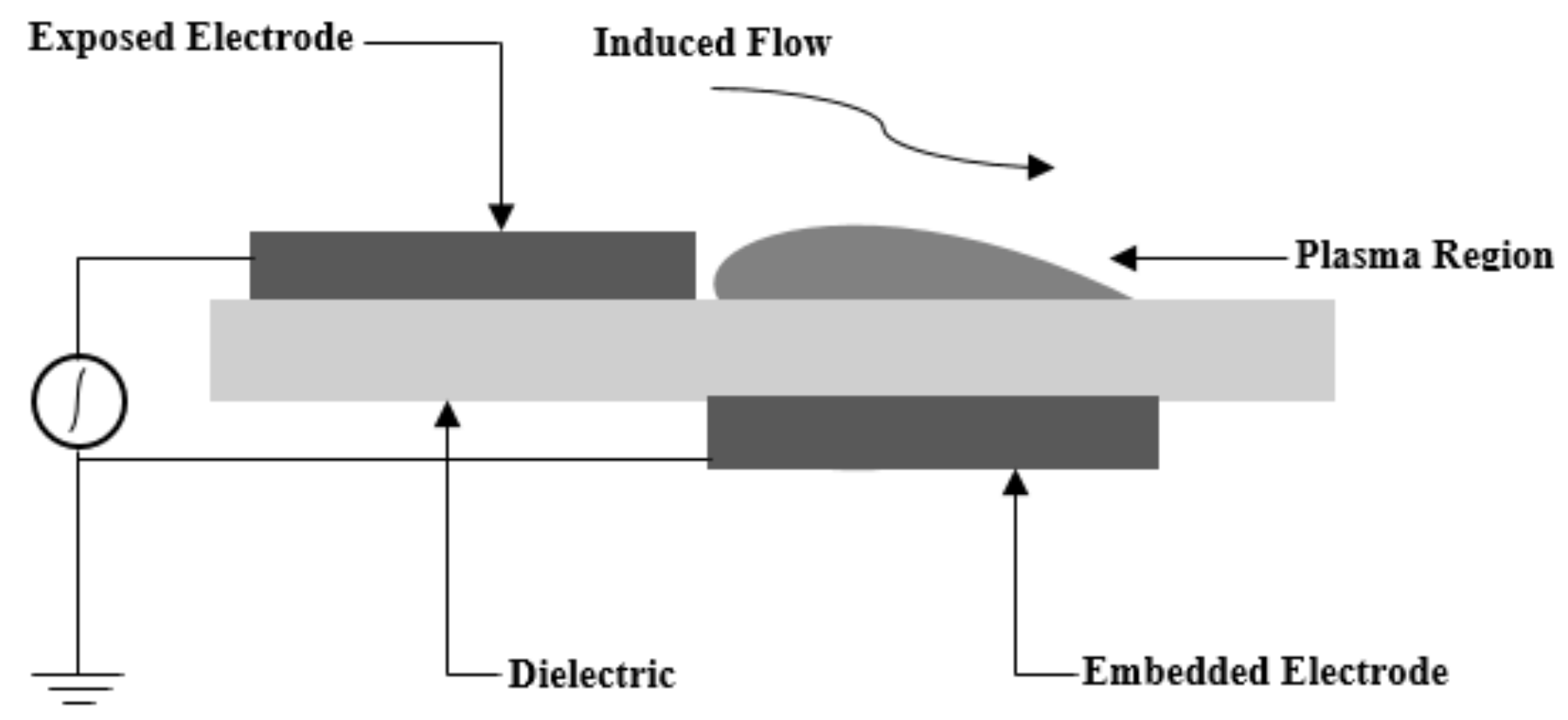
A single DBD actuator consists of two electrodes and one dielectric layer (see
Figure 4). The high voltage alternating current (AC) power is applied to the upper (exposed) electrode, while the lower (encapsulated) electrode is covered with a dielectric layer that is electrically grounded. When the magnitude of the applied voltage is sufficiently high, air molecules near the upper electrode ionize, and due to the electrical field generated by electrodes, the momentum of the fluid increases.
We used the method introduced by Suzen and Huang (2005) [
18] for simulating the body force produced by the actuators, which employs an electrostatic model with Gaussian charge distribution. The body force was calculated using the Lorentz equation, which was added to the Navier-Stokes equations as a body force term
in Equation (
2),
where
is the net charge,
shows the electric field and
is the electric potential. The model of Huang (2005) [
18] uses two independent equations to simulate the electric potential field and charge density:
where
is the Debye length and
represents the relative permittivity of the dielectric.
The AC voltages (
) applied to the electrodes are calculated using the following equation:
where
is the maximum amplitude of the applied voltage and
is a sinusoidal function wave given by:
where
is the frequency of the AC voltage applied to the electrodes. In the current study, we considered steady state conditions, which transform
into a square wave format [
19]. The maximum amplitude of the applied voltage and frequency for numerical simulations are set as
, 10 and 12 kV and
kHz, respectively. The normal gradient of net charge (
) is calculated using the following equation over the embedded electrode:
where
is the maximum net charge density and
is the Gaussian distribution function defined as:
Here,
is the location parameter indicating the maximum value of
in the
x direction for
, and
is the scale parameter determining the excited region width along the dielectric surface over the embedded electrode. It is important to note that
is set to 0 for other regions, including the outer boundary, exposed electrode and the interface between air and the dielectric surface. The aforementioned parameters were selected based on the calibrations that followed the work of Bouchmal (2011) [
19], which generalized the parameters as a function of
. Thus, it is possible to use fixed constants for different Reynolds numbers while keeping
constant.
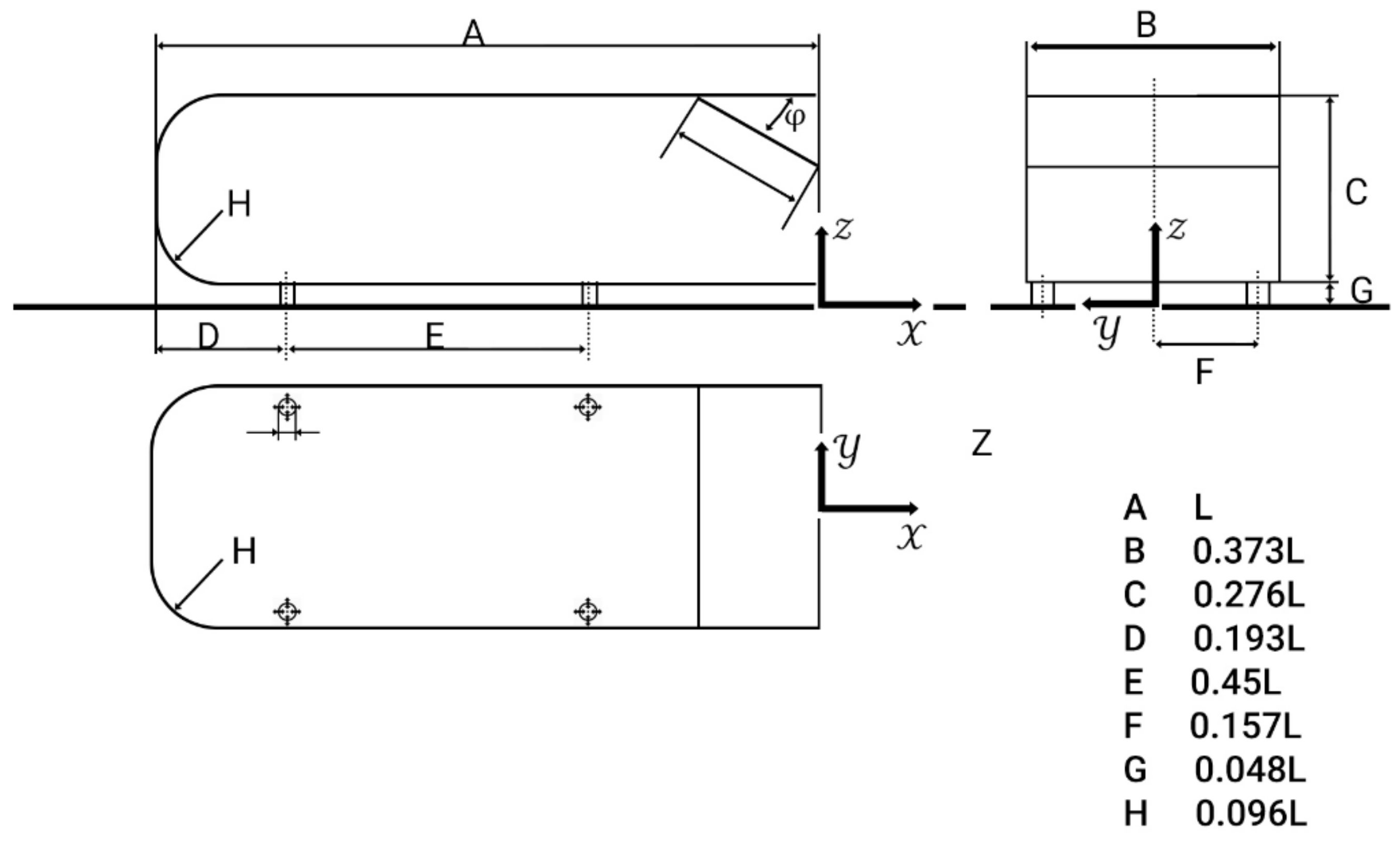
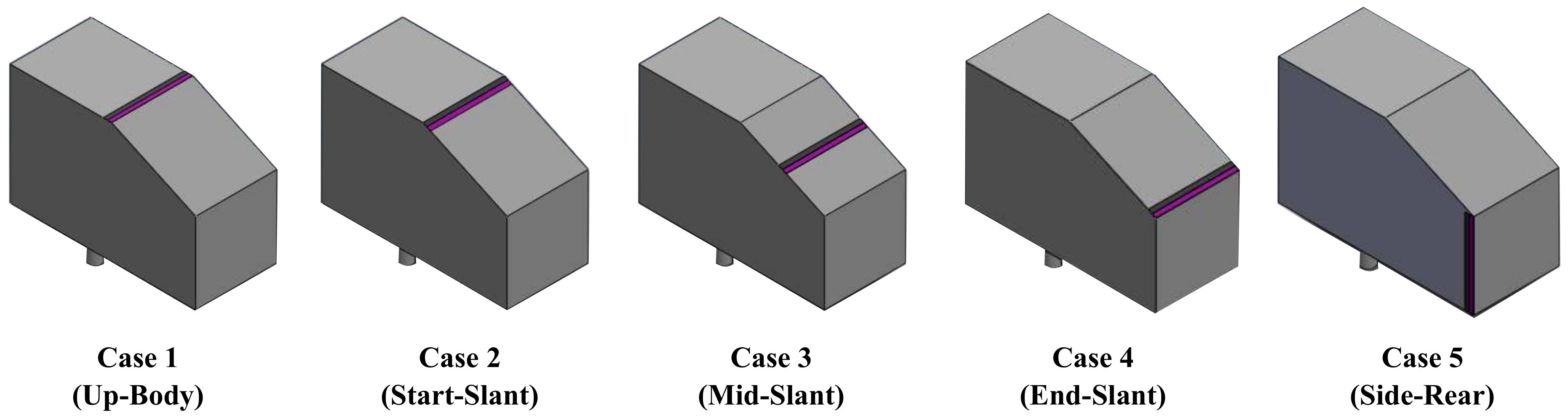
In this study, one SDBD actuator was placed in 5 different locations on the surface of an Ahmed body to determine the location that provides the best aerodynamic performance. The geometries of the Ahmed body and various locations have been indicated in
Figure 5 and
Figure 6. The actuators were designed following Suzen and Huang (2005) [
18]. Four cases were investigated based on the locations of the actuators: on the connection part of the roof and slant (case 1), on the beginning part of the slant (case 2), at the middle part of the slant (case 3) and at the ending part of the slant (case 4). Furthermore, the effect of implementing two actuators on both ending parts of the model sides was investigated in case 5.
3. Experimental Setup
The experimental tests were carried out in the low subsonic wind tunnel of Dana Aerodynamic Research Laboratory at Amirkabir University, which has a 1 m × 1 m × 2.5 m test section. The air velocity in the wind tunnel is adjustable between 5 and 60 m/s with the turbulence intensity of approximately
. In the present research, the freestream velocity was 10 m/s corresponding to
. The Ahmed body dimensions in experiments (
Figure 7) were the same as the one used in simulations. The Glauert’s correction with
[
20] has been utilized to minimize the experimental measurement errors.
The high voltage electricity and electromagnetic field generated by the DBD apparatus may create low-amplitude high-frequency noise on the analog signal of the measurement system. Therefore measurement instruments, the data acquisition system and high voltage wires were shielded using aluminum foil, and the shield was connected to the ground wire. Furthermore, the load cell location was sufficiently far from the actuator to minimize the noise generated by the strong DBD actuator electric field. The actuators were manufactured using photofabrication (printed circuit board, PCB fabrication) method. Kapton tape was utilized as the dielectric material. The shape and size of the actuators and thickness of the dielectric layer were chosen based on the numerical simulations in this study. A sinusoidal electric wave was generated using an AC power supply with a maximum peak to peak voltage of 20 kV and variable frequency up to 30 kHz. Paralleling the numerical simulations, the applied voltages in the experiments were 8, 10 and 12 kV and the frequency was 4.5 kHz. The SDBD actuator was driven continuously ( duty cycle). Force measurements were performed using L6D-C3 ZEMIC load cell with a combined error of less than FS. This translates to a maximum error of considering all of the measurements related to drag-reduction.
4. Validation Study
The numerical setup was validated around an Ahmed body with slant angles of
and
at
and
, by comparing the results with other studies that have similar condition and setup. As shown in
Table 2, the maximum difference in drag coefficient with other experimental results is less than
. For the case of an Ahmed body with
slant angle, Guilmineau et al. (2018) [
13] has shown that RANS simulation cannot model all the flow features. Therefore, only the drag coefficient is compared in different situations to ensure that the drag coefficient is correct. However in the case of
slant angle, the literature [
13] agrees that RANS
turbulence model can successfully predict the main flow features around the Ahmed body. This variation in performance of RANS models may be attributed to large pressure and velocity gradients in the wake, as was suggested by Fogaing et al. (2019) [
21].
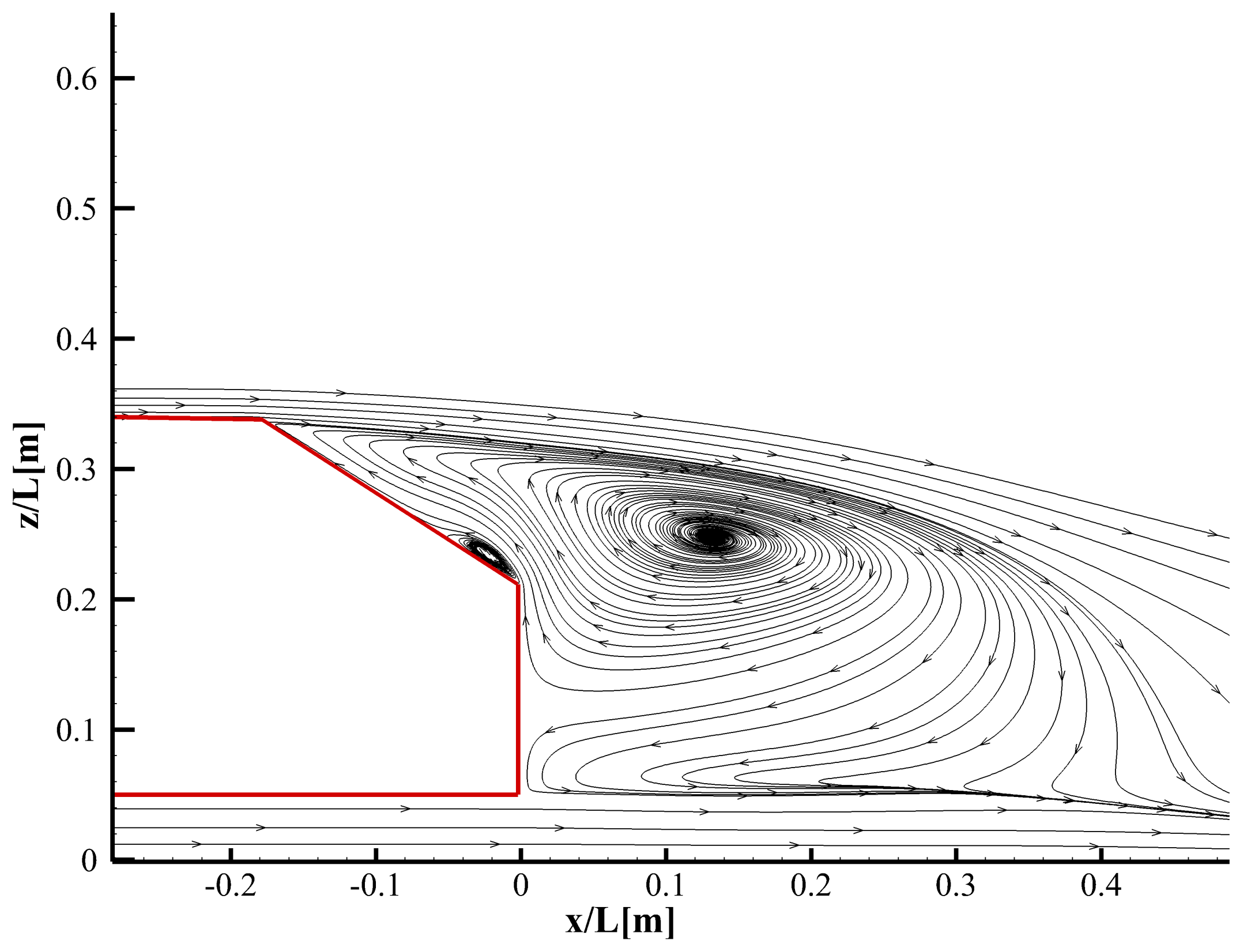
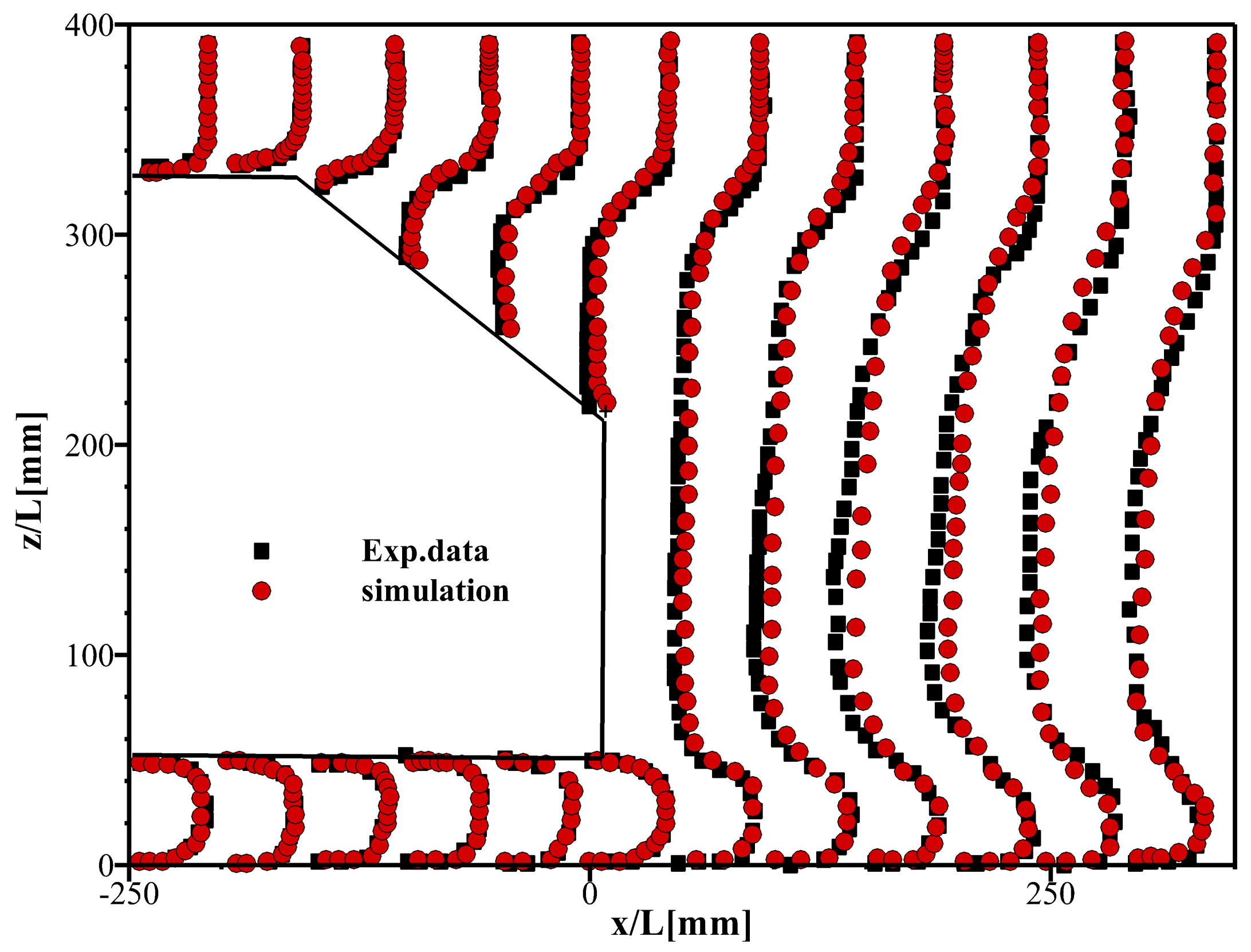
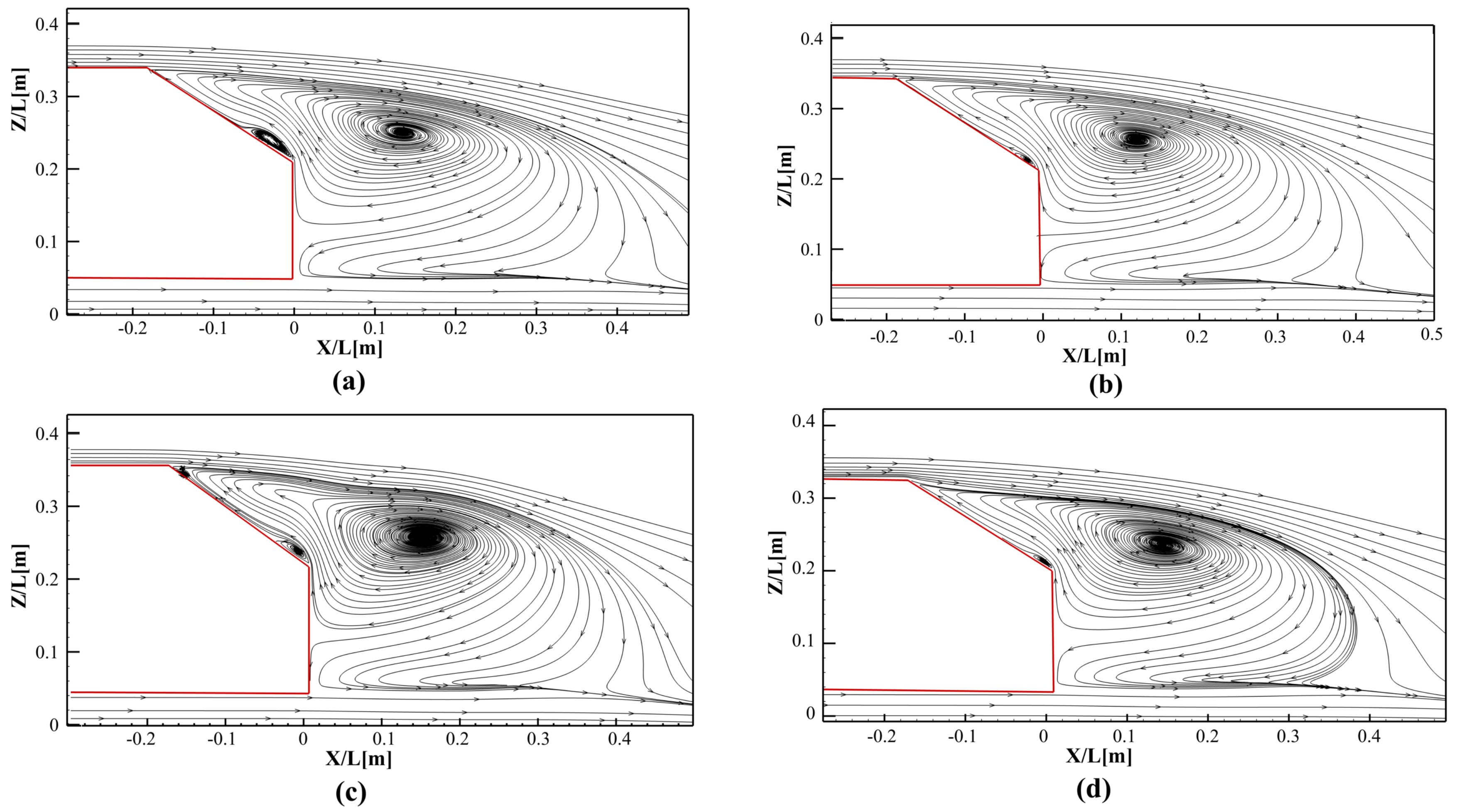
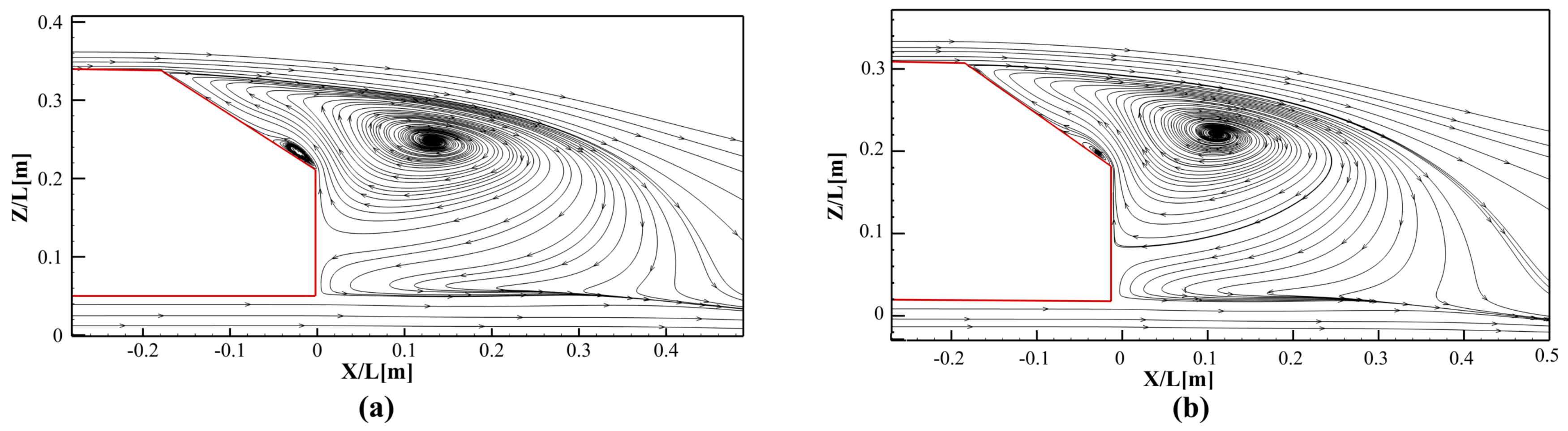
The wake characteristics in
Figure 8 compare well with those obtained numerically by Guilmineau et al. (2018) [
13]. Moreover, the current results compared with the experiments of Meili et al. (2011) [
22] in
Figure 9 show good agreement. Case 2, which looks at the SDBD actuator located at the beginning part of the slant surface, was selected for the validation study. The DBD actuator consisted of two conductive copper electrodes, which were separated by one dielectric layer that had a thickness of 0.127 mm and relative permittivity of
. The values of
and
, and the quiescent air condition for the actuators, were selected due to the previously adjusted values by Bouchmal (2011) [
19]. In the present study, the Debye length (
) was set at
, and the applied frequency was 4.5 kHz. For applying the conditions of numerical simulation accurately in experiments, two layers of polyimide kapton tape were utilized for an approximate dielectric material thickness of
m and a relative permittivity of 2.7. Furthermore, the applied voltage, frequency and dimensions of electrodes were selected based on those of the simulations.
We compare the results from simulations and experiments for the
slant angle case and at the Reynolds number of
in
Table 3. The good agreement between numerical results and experimental data confirms the validity of numerical results in predicting the flow around an Ahmed body with and without the DBD actuators. The drag coefficient of the Ahmed body presented by Mile et al. (2011) [
22] at a similar Reynolds number was 0.34, which is within the
of the experimental results in the current study.
SDBD Actuator Model Validation
To validate the mathematical model utilized for estimating the velocity and body force of the actuator in the simulations, we simulated an SDBD actuator at zero freestream velocity. In the work of Suzen et al. (2005) [
18], the actuator consisted of two 10 mm wide and 0.102 mm in thickness conductive copper strips as the electrodes, which were separated by a Kapton dielectric with a thickness of 0.127 mm. The lower electrode was grounded, and the excited air region was generated using a square wave with an applied voltage of
kV and a frequency of 4.5 kHz. The quiescent conditions in this study were selected, such that they were the same as those used by Boucmal (2011) [
19] and Suzen et al. (2005) [
18]. The maximum velocity and magnitude of the computed body force vectors are compared with those of Boucmal (2011) [
19] and Suzen et al. (2005) [
18] in
Table 4.
Figure 10 shows the simulated velocity distribution of an SDBD actuator operating at zero freestream velocity. As shown, the maximum velocity region is concentrated over the upper left corner of the embedded electrode.
Table 4 and
Figure 10 show good agreement with results of Suzen et al. (2005) [
18] and Bouchmal (2011) [
19]. The small difference of the results (
) with those of Suzen et al. (2005) [
18] can be attributed to the different numbers of cells and mesh quality.
6. Conclusions
The performance of an active flow control around an Ahmed body model with and slant angles has been studied using a single dielectric barrier discharge (SDBD) actuator. This study focused on finding the best locations and applied voltages of the SDBD actuators in order to reduce drag on an Ahmed body, which is a simplified car model. The effect of implementing the actuators with multiple arrangements on aerodynamic performance of the body was also investigated. Numerical simulations have been carried out at a Reynolds number of (freestream velocity of 10 m/s) with the applied voltages of 8, 10 and 12 kV, and at Reynolds number of (freestream velocity of 40 m/s) with the applied voltage of 12 kV. The experimental tests were performed at the Reynolds number of with the applied voltages of 12 kV for the best location and with the applied voltages of 8, 10 and 12 kV for multiple arrangements. The combination of numerical and experimental results suggests that utilizing SDBD actuators operated in an effective condition can significantly improve the aerodynamic performance of ground vehicles by up to at low Reynolds numbers. However, due to the small amount of the body force exerted by SDBD actuators, their effectiveness decreases with increasing Reynolds numbers. Thus, other configurations of these actuators are needed for to-scale automobiles.
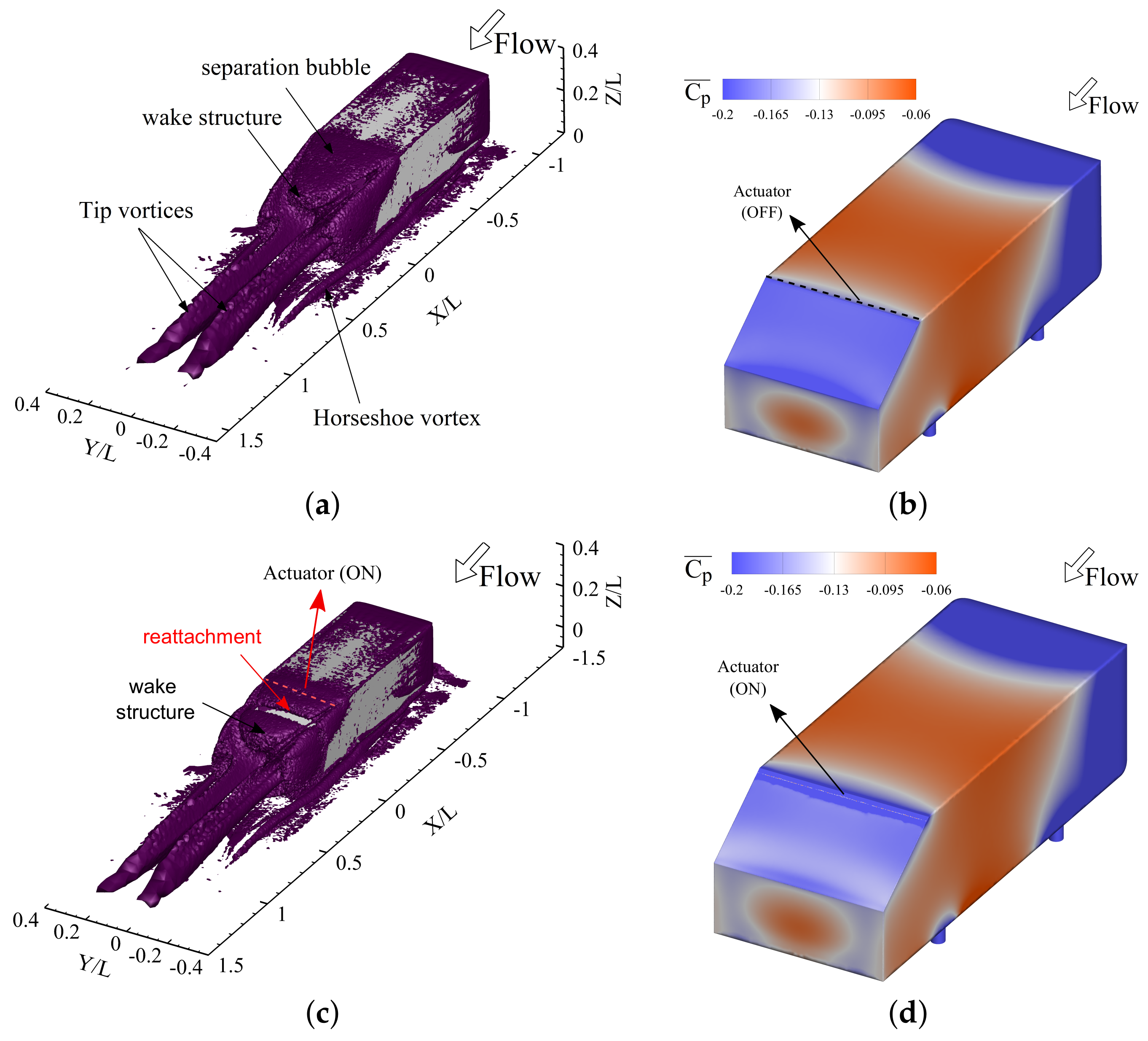
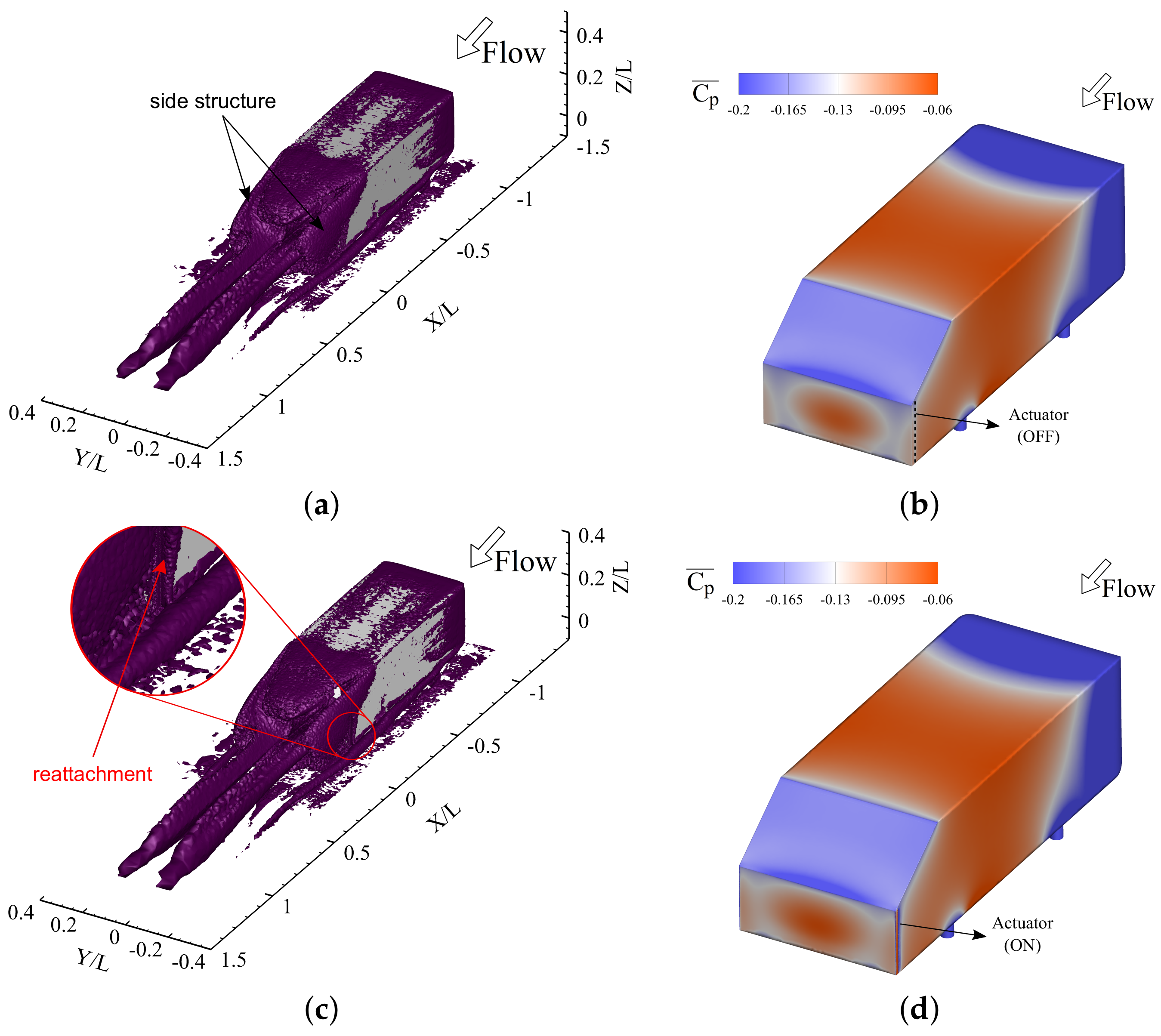
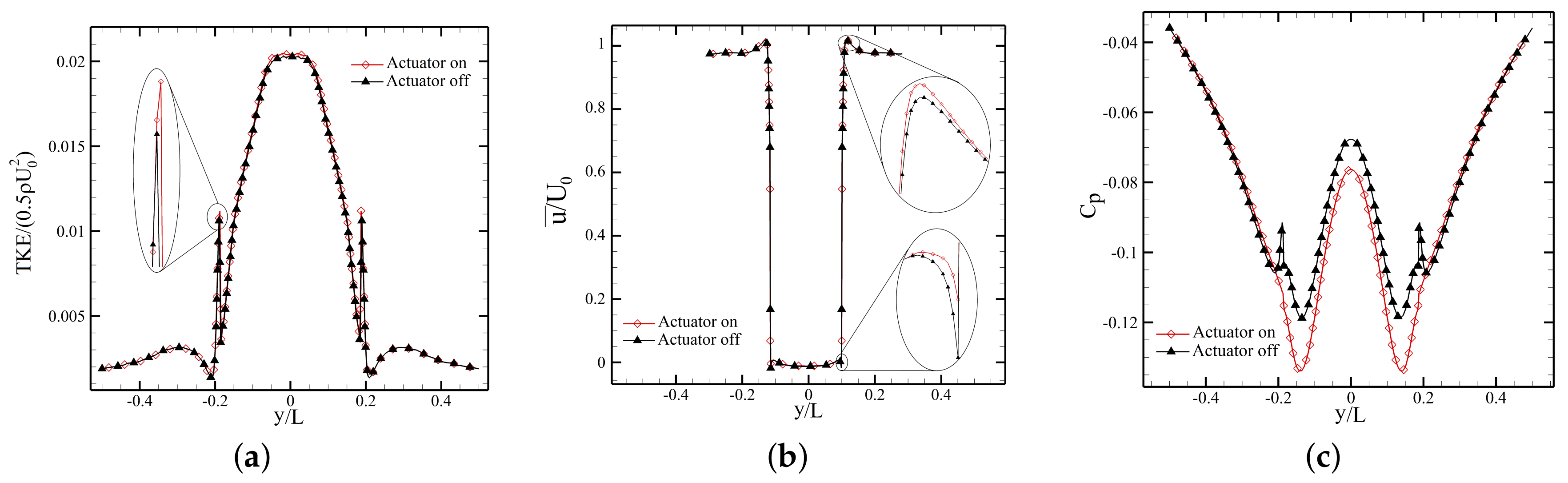
It was also apparent that the locations of actuators could significantly affect their performances in controlling flow around an Ahmed body. For the Ahmed body, the beginning part of the slant surface is the best location that leads to the most significant impact on the flow, and thus the drag. This aerodynamic improvement for case 2 is attributed to the reattachment of the separated flow on the slant surface, which leads to surface pressure increase on the slant and pressure. Furthermore, it is shown that the side SDBD actuators increase the streamwise velocity and turbulent kinetic energy at the edge of the near wake region and change the pressure distribution of inside the wake.
It is shown that increasing the applied voltage would improve the performance of the actuators in this case. However, there is a limitation on increasing this parameter, which is consistent with previous observations in the literature [
5]. It was also determined that using different arrangements of actuators would not have any significant effect compared to the placement of a single actuator. However, multiple arrangements require more operational power, which leads to a relatively lower efficiency compared to single actuators.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}