
Effect of Plasma Actuator on Velocity and Temperature Profiles of High Aspect Ratio Rectangular Jet


Abstract
:1. Introduction
2. Experimental Apparatus and Procedure
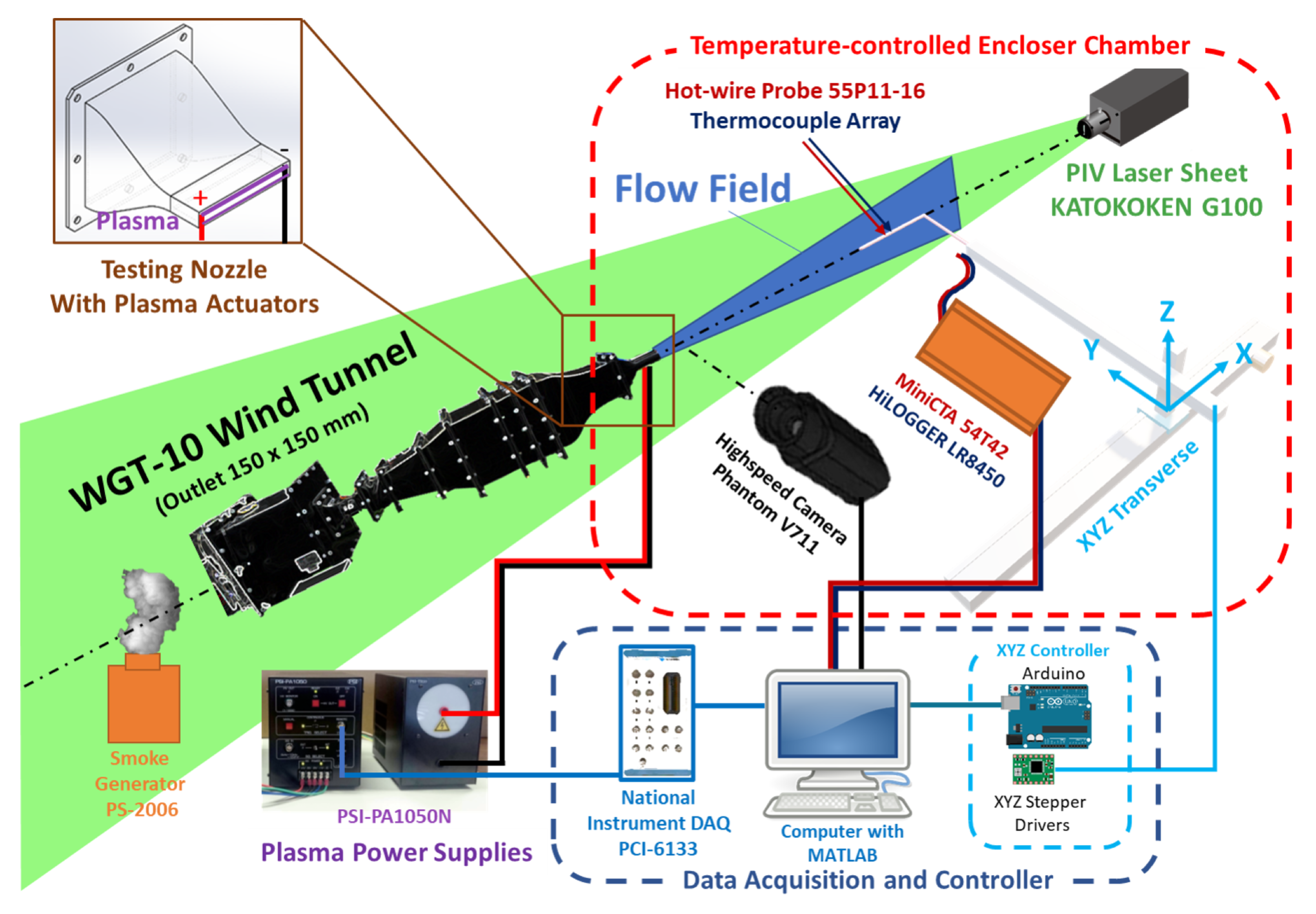
2.1. Apparatus, Velocity Measurement, Temperature Measurement, and Visualization
2.2. High Aspect Ratio Rectangular Jet Control by Plasma Actuators Experiment Setup
3. Results and Discussion
3.1. Plasma Actuator Effect on High Aspect Ratio Rectangular Jet Velocity
- —Centerline velocity at x;
- —Average velocity at outlet where () = (0,0,0);
- h—Height of rectangular nozzle; and
- —Centerline velocity decay constant.
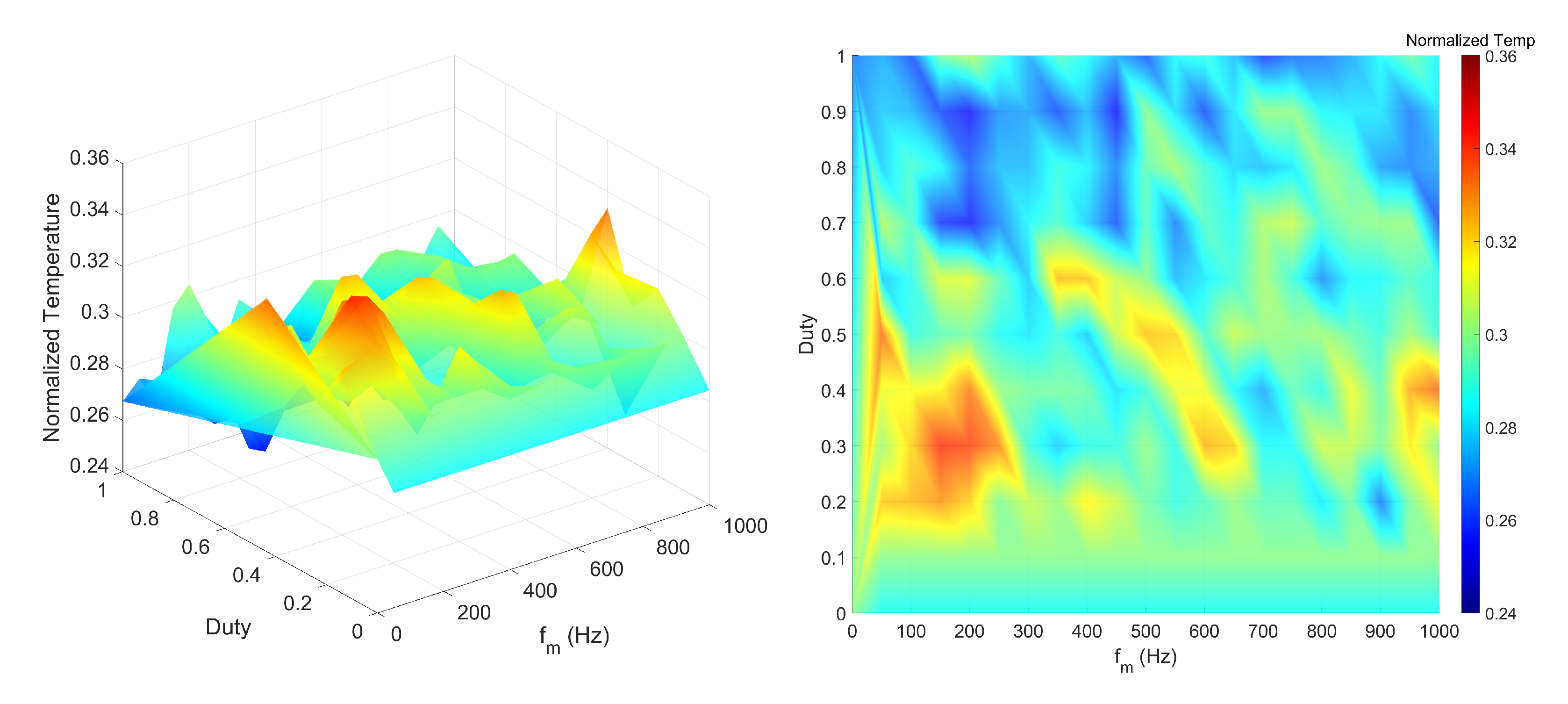
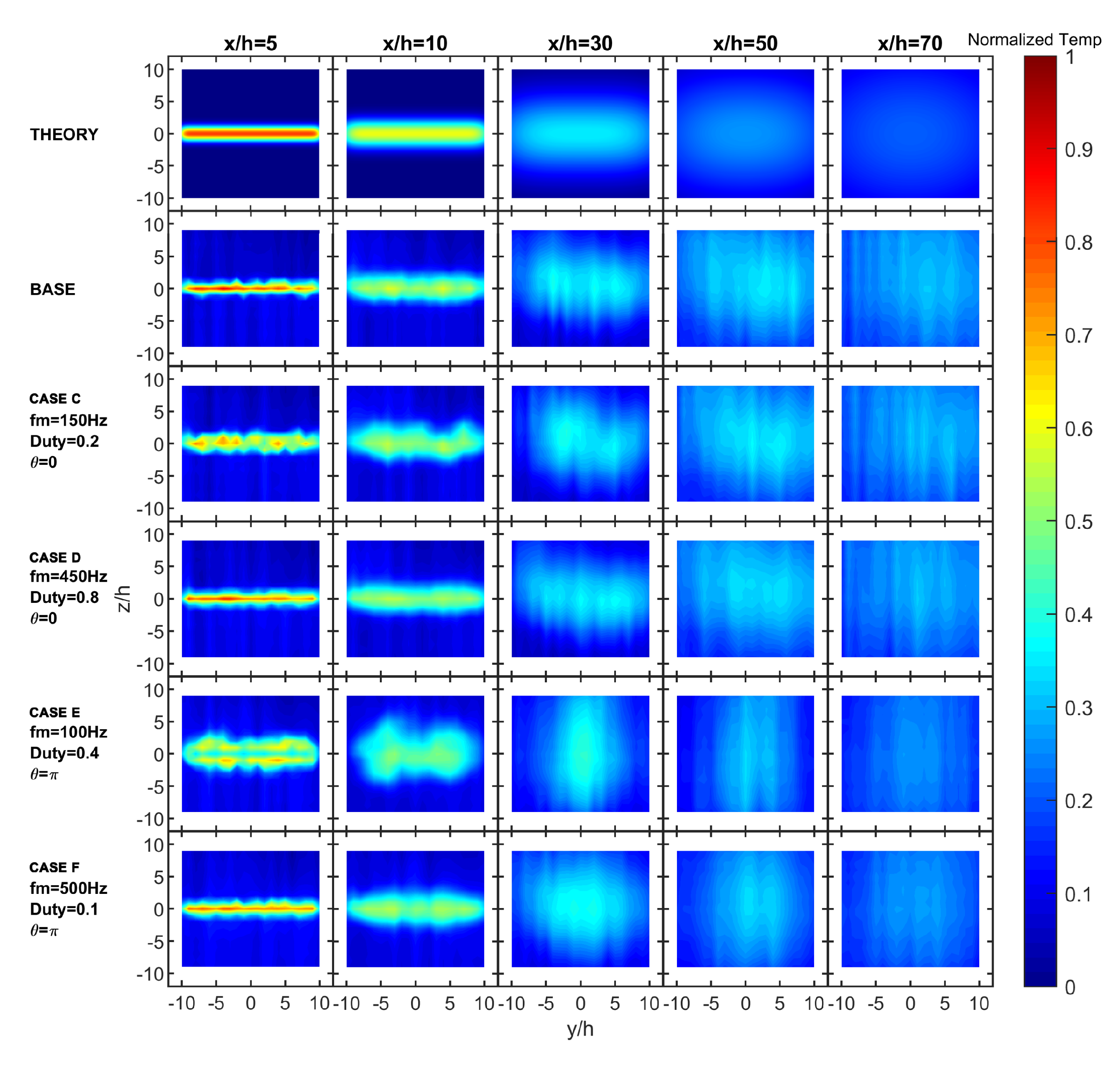
3.2. Plasma Actuator Effect on High Aspect Ratio Rectangular Jet Temperature
- —Velocity at any given point in space with () coordinate;
- —Average velocity at outlet where () = (0,0,0);
- —Temperature at any given point in space with () coordinate;
- —Ambient temperature;
- —Average temperature at outlet where () = (0,0,0);
- —Half length of nozzle width;
- —Half length of nozzle height;
- —Prandtl number;
- c—Empirical constant.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PA | Plasma Actuator |
| DBD | Dielectric Barrier Discharge |
| AR | Aspect Ratio |
| PID | Proportional–Integral–Derivative |
| AC | Alternative Current |
References
- Rajaratnam, N. Turbulent Jets; Elsevier: Amsterdam, The Netherlands, 1976; Chapter 13; p. 267. [Google Scholar]
- Shakouchi, T. Jet Flow Engineering: Fundamentals and Application; Morikita Publishing Co., Ltd.: Tokyo, Japan, 2004. [Google Scholar]
- Deo, R.C.; Mi, J.; Nathan, G.J. The influence of nozzle-exit geometric profile on statistical properties of a turbulent plane jet. Exp. Therm. Fluid Sci. 2007, 32, 545–559. [Google Scholar] [CrossRef]
- Corke, T.C.; Enloe, C.L.; Wilkinson, S.P. Dielectric barrier discharge plasma actuators for flow control. Annu. Rev. Fluid Mech. 2010, 42, 505–529. [Google Scholar] [CrossRef]
- Benard, N.; Bonnet, J.P.; Touchard, G.; Moreau, E. Flow Control by Dielectric Barrier Discharge Actuators: Jet Mixing Enhancement. AIAA J. 2008, 46, 2293–2305. [Google Scholar] [CrossRef]
- Riherd, M.; Roy, S. Measurements and simulations of a channel flow powered by plasma actuators. J. Appl. Phys. 2012, 112, 053303. [Google Scholar] [CrossRef]
- Castellanos, R.; Michelis, T.; Discetti, S.; Ianiro, A.; Kotsonis, M. Reducing turbulent convective heat transfer with streamwise plasma vortex generators. Exp. Therm. Fluid Sci. 2022, 134, 110596. [Google Scholar] [CrossRef]
- Rizzetta, D.P.; Visbal, M.R. Numerical investigation of plasma-based control for low-Reynolds-number airfoil flows. AIAA J. 2011, 49, 411–425. [Google Scholar] [CrossRef]
- Portugal, S.; Choudhury, B.; Lilley, A.; Charters, C.; Porrello, C.; Lin, J.; Roy, S. A fan-shaped plasma reactor for mixing enhancement in a closed chamber. J. Phys. D Appl. Phys. 2020, 53, 22LT01. [Google Scholar] [CrossRef]
- Wojewodka, M.M.; White, C.; Kontis, K. Effect of permittivity and frequency on induced velocity in ac-DBD surface and channel plasma actuators. Sens. Actuators A Phys. 2020, 303, 111831. [Google Scholar] [CrossRef]
- Moreau, E.; Cazour, J.; Benard, N. Influence of the air-exposed active electrode shape on the electrical, optical and mechanical characteristics of a surface dielectric barrier discharge plasma actuator. J. Electrost. 2018, 93, 146–153. [Google Scholar] [CrossRef]
- Rodrigues, F.; Mushyam, A.; Pascoa, J.; Trancossi, M. A new plasma actuator configuration for improved efficiency: The stair-shaped dielectric barrier discharge actuator. J. Phys. D Appl. Phys. 2019, 52, 385201. [Google Scholar] [CrossRef]
- List, E. Turbulent jets and plumes. Annu. Rev. Fluid Mech. 1982, 14, 189–212. [Google Scholar] [CrossRef]
- Fukagata, K.; Yamada, S.; Ishikawa, H. Plasma actuators: Fundamentals and research trends. J. Jpn. Soc. Fluid Mech. 2010, 29, 243–250. [Google Scholar]
- Shepelev, I. Supply ventilation jets and fountains. In Proceedings of the Academy of Construction and Architecture of the USSR, Moscow, Russia, 14–17 November 1961; Volume 4. [Google Scholar]
- Kraemer, K. Die Potentialströmung in der Umgebung von Freistrahlen. Z. Flugwiss 1971, 19, 93–104. [Google Scholar]
- Heskestad, G. Hot-wire measurements in a plane turbulent jet. Trans. ASME J. Appl. Mech. 1965, 32, 721–731. [Google Scholar] [CrossRef]
- Kotsovinos, N.E.; List, E.J. Plane turbulent buoyant jets. Part 1. Integral properties. J. Fluid Mech. 1977, 81, 25–44. [Google Scholar] [CrossRef]
- Goodfellow, H.D.; Kosonen, R. Industrial Ventilation Design Guidebook: Volume 1: Fundamentals; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Tang, A.; Vaddi, R.; Mamishev, A.; Novosselov, I. Empirical relations for discharge current and momentum injection in dielectric barrier discharge plasma actuators. J. Phys. D Appl. Phys. 2021, 54, 245204. [Google Scholar] [CrossRef]
- Ashpis, D.; Laun, M.; Griebeler, E. Progress toward accurate measurement of dielectric barrier discharge plasma actuator power. AIAA J. 2017, 55, 2254–2268. [Google Scholar] [CrossRef] [PubMed]
- Shepelev, I.; Gelman, N. Universal equations for velocity and temperature computation along the ventilation jets, supplied from rectangular outlets. Water Supply. Sanit. Tech. 1966. [Google Scholar]
- Koestel, A. Pathsof Horizontally Projected Heated and Chilled Airjets. ASHVE J. 1955, 27, 55. [Google Scholar]
- Abramovich, G. Free Turbulent Jets of Liquids and Gases; Gosẽnergoizdat: Moscow, Russia, 1948; p. 288. [Google Scholar]
- Jakob, H.; Kim, M.K. Feasibility Study on the Use of Non-Thermal Plasma for a Cold Radio Blackout Experiment. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 2150. [Google Scholar] [CrossRef]
- Moreau, E. Airflow control by non-thermal plasma actuators. J. Phys. D Appl. Phys. 2007, 40, 605. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Unit |
|---|---|---|---|
| B | Nozzle width | 150 | mm |
| h | Nozzle height | 7.5 | mm |
| Outlet velocity | 4.5 | m/s | |
| Controlled ambient temperature (average) | 40 | C | |
| Controlled nozzle temperature (average) | 12 | C | |
| Peak-to-peak voltage of PA controlling signal | 6 | kV | |
| Base frequency of PA controlling signal | 15 | kHz | |
| Modular frequency voltage of PA controlling signal | 0–1000, 50 each step | Hz | |
| Duty of PA controlling signal | 0–1, 0.1 each step | ||
| Phase difference between upper and lower PA | 0 and |
| No. | Case Name | Description | |||
|---|---|---|---|---|---|
| 1 | Base | Base case | - | - | - |
| 2 | Case A | High Velocity | 150 Hz | 0.5 | 0 |
| 3 | Case B | Low Velocity | 50 Hz | 0.7 | |
| 4 | Case C | High Normalized Temperature | 150 Hz | 0.2 | 0 |
| 5 | Case D | Low Normalized Temperature | 450 Hz | 0.8 | 0 |
| 6 | Case E | Low Normalized Temperature | 100 Hz | 0.4 | |
| 7 | Case F | High Normalized Temperature | 500 Hz | 0.1 |
| Case | Description | |||||||
|---|---|---|---|---|---|---|---|---|
| Single PA | - | - | 3.158 | 2.985 | - | 3.158 | - | - |
| A | High velocity | 6.253 | 3.158 | 2.985 | 174.0 | 3.158 | 0.04773 | 1.815 |
| B | Low velocity | 6.253 | 4.421 | 4.179 | 174.0 | 4.421 | 0.06682 | 2.541 |
| C | High Normalized Temperature | 6.253 | 1.263 | 1.194 | 174.0 | 1.263 | 0.01909 | 0.726 |
| D | Low Normalized Temperature | 6.253 | 5.052 | 4.776 | 174.0 | 5.052 | 0.07637 | 2.904 |
| E | Low Normalized Temperature | 6.253 | 2.526 | 2.388 | 174.0 | 2.526 | 0.03819 | 1.452 |
| F | High Normalized Temperature | 6.253 | 0.632 | 5.970 | 174.0 | 0.632 | 0.00955 | 0.363 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, A.V.; Inaba, K.; Saito, M.; Sakai, M. Effect of Plasma Actuator on Velocity and Temperature Profiles of High Aspect Ratio Rectangular Jet. Fluids 2022, 7, 281. https://doi.org/10.3390/fluids7080281
Pham AV, Inaba K, Saito M, Sakai M. Effect of Plasma Actuator on Velocity and Temperature Profiles of High Aspect Ratio Rectangular Jet. Fluids. 2022; 7(8):281. https://doi.org/10.3390/fluids7080281
Chicago/Turabian StylePham, Anh Viet, Kazuaki Inaba, Miyuki Saito, and Masaharu Sakai. 2022. "Effect of Plasma Actuator on Velocity and Temperature Profiles of High Aspect Ratio Rectangular Jet" Fluids 7, no. 8: 281. https://doi.org/10.3390/fluids7080281