
Evaluation of Canopy Growth in Rainfed Olive Hedgerows Using UAV-LiDAR

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
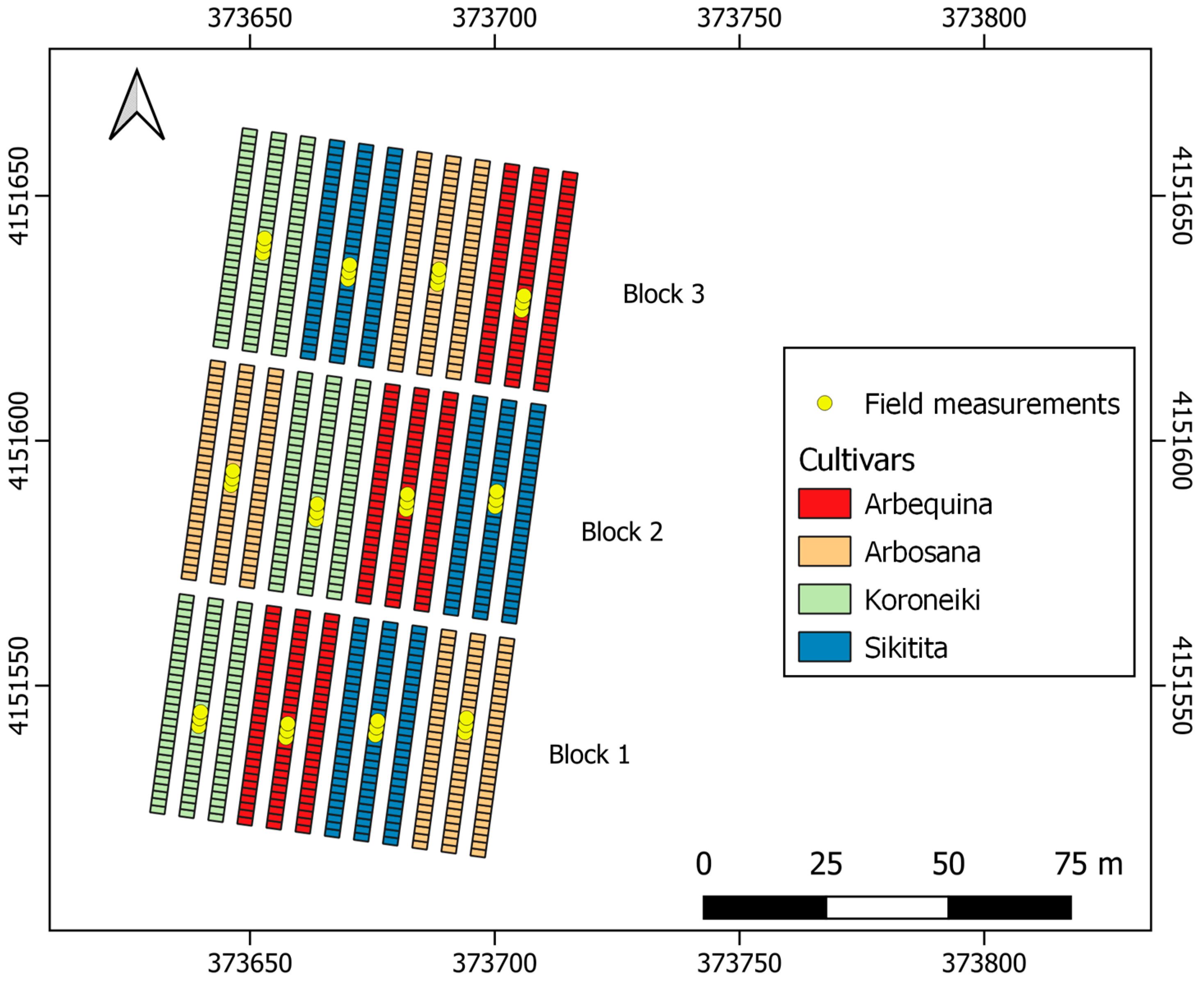
2.1. Study Site
2.2. UAV-Based LiDAR Platform and Flight Configuration
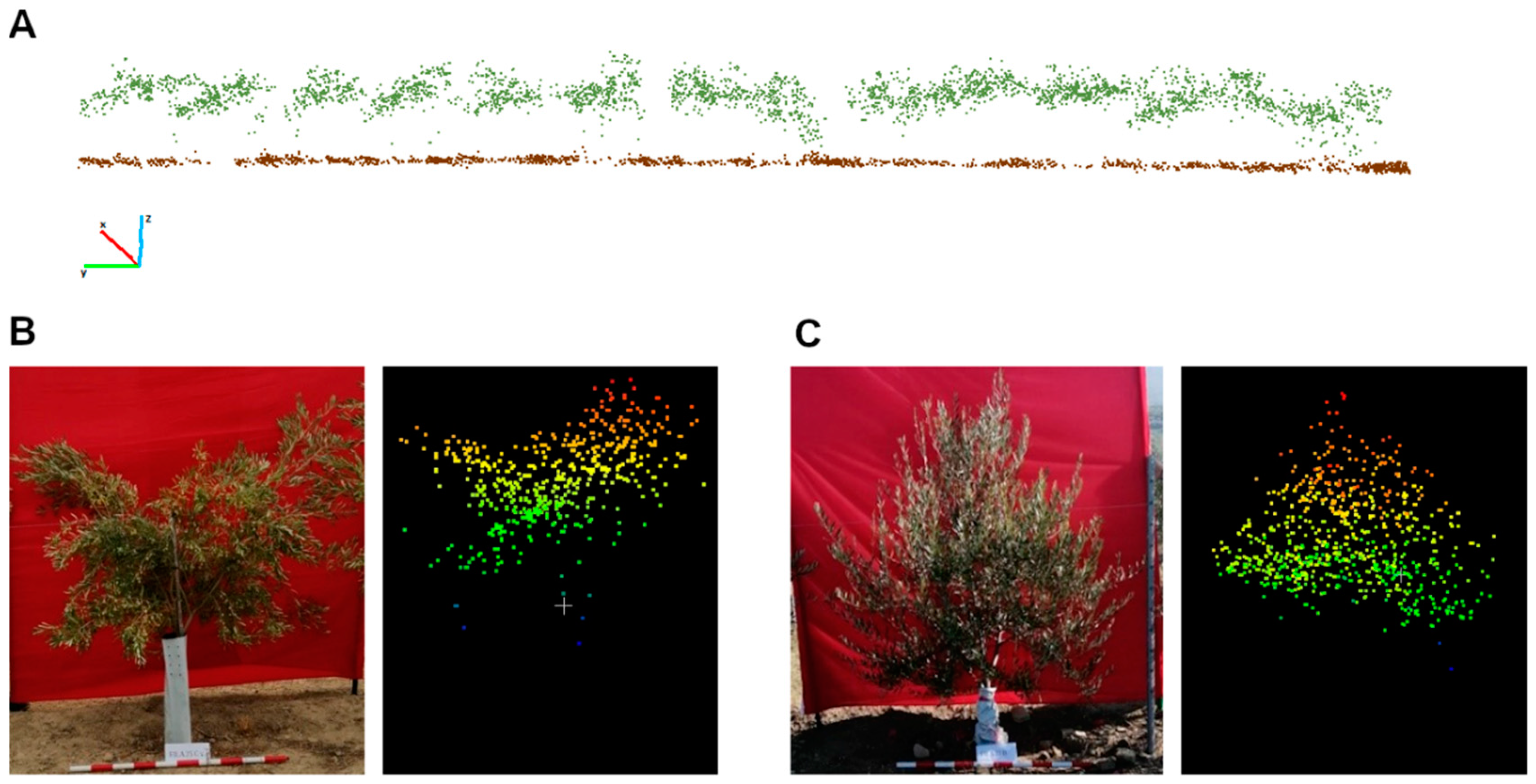
2.3. Point Cloud Generation and Individual Tree Segmentation
- Determining the trajectory followed by the sensor;
- Generating and cleaning the 3D point cloud;
- Extracting and characterizing each olive tree crown;
- Statistically analyzing the data.
2.4. Validation
2.5. Statistical Analysis
3. Results
3.1. Point Cloud Generation
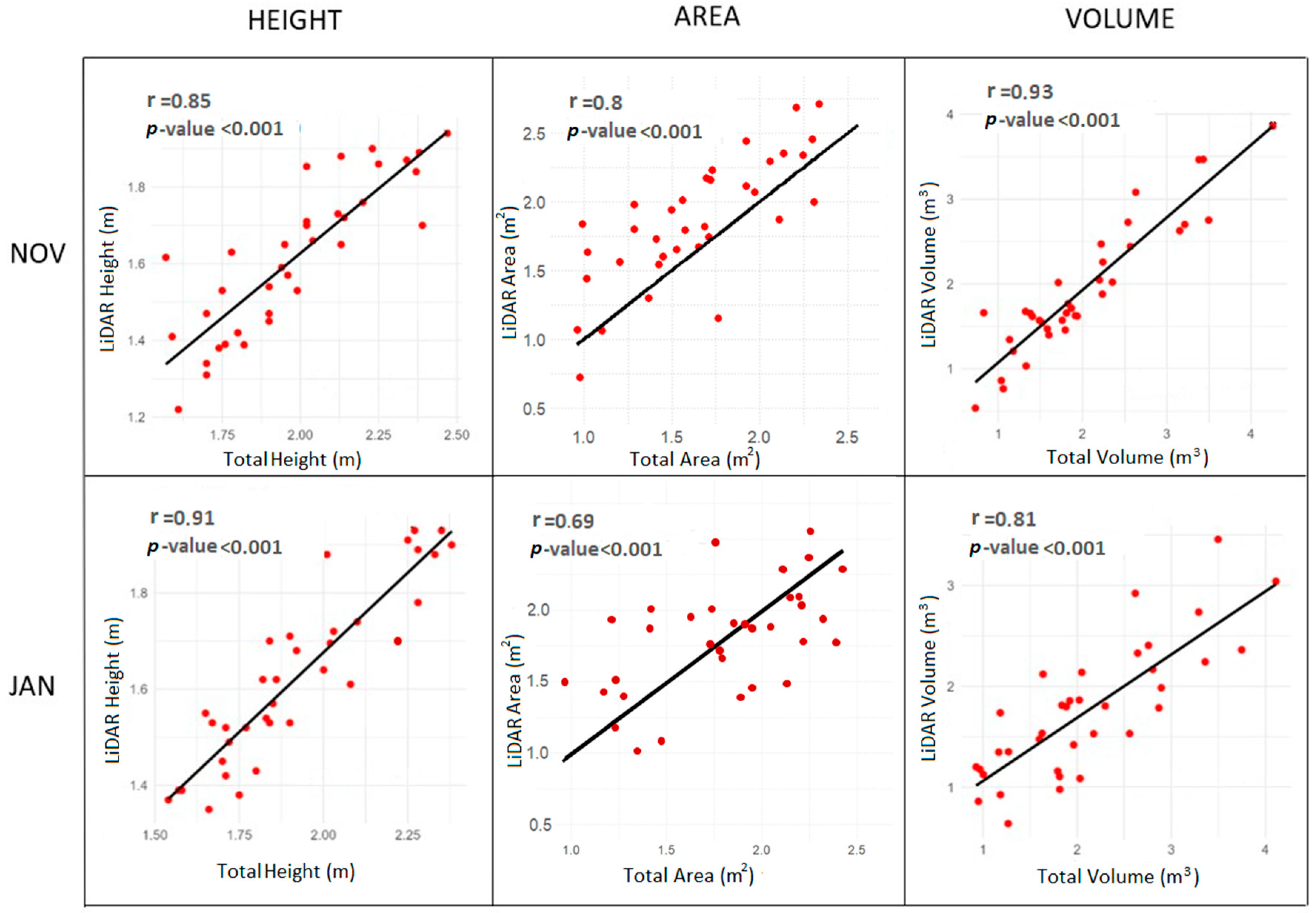
3.2. Validation of the LiDAR-Derived Crown Metrics
3.3. LiDAR Data Extraction in the Experimental Orchard
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fernández-Escobar, R.; Gil-Ribes, J.A.; Quesada-Moraga, E.; Trapero, A.; Msallem, M. Evolution and Sustainability of the Olive Production Systems. Options Mediterr. 2013, 106, 11–42. [Google Scholar]
- Hueso, A.; González-García, C.; Atencia, L.K.; Nowack, J.C.; Gómez-Del-Campo, M. Methodology of Stem Water Potential Measurement on Hedgerow Olive Orchards. Span. J. Agric. Res. 2023, 21, e0902. [Google Scholar] [CrossRef]
- ESYRCE Encuesta sobre Superficies y Rendimientos Cultivos. Available online: https://www.mapa.gob.es/es/estadistica/temas/estadisticas-agrarias/agricultura/esyrce/ (accessed on 8 July 2024).
- Junta de Andalucía. Decree 103/2015, of March 10, approving the Master Plan for Olive Grove. Official Gazzete of the Junta de Andalucía. 2015. Available online: https://www.juntadeandalucia.es/boja/2015/54/2 (accessed on 8 July 2024).
- Madec, S.; Baret, F.; de Solan, B.; Thomas, S.; Dutartre, D.; Jezequel, S.; Hemmerlé, M.; Colombeau, G.; Comar, A. High-Throughput Phenotyping of Plant Height: Comparing Unmanned Aerial Vehicles and Ground LiDAR Estimates. Front. Plant Sci. 2017, 8, 2002. [Google Scholar] [CrossRef]
- Rallo, P.; de Castro, A.I.; López-Granados, F.; Morales-Sillero, A.; Torres-Sánchez, J.; Jiménez, M.R.; Jiménez-Brenes, F.M.; Casanova, L.; Suárez, M.P. Exploring UAV-Imagery to Support Genotype Selection in Olive Breeding Programs. Sci. Hortic. 2020, 273, 109615. [Google Scholar] [CrossRef]
- Zaman-Allah, M.; Vergara, O.; Araus, J.L.; Tarekegne, A.; Magorokosho, C.; Zarco-Tejada, P.J.; Hornero, A.; Albà, A.H.; Das, B.; Craufurd, P.; et al. Unmanned Aerial Platform-Based Multi-Spectral Imaging for Field Phenotyping of Maize. Plant Methods 2015, 11, 35. [Google Scholar] [CrossRef]
- Marques, P.; Pádua, L.; Sousa, J.J.; Fernandes-Silva, A. Assessing the Water Status and Leaf Pigment Content of Olive Trees: Evaluating the Potential and Feasibility of Unmanned Aerial Vehicle Multispectral and Thermal Data for Estimation Purposes. Remote Sens. 2023, 15, 4777. [Google Scholar] [CrossRef]
- Paulus, S. Measuring Crops in 3D: Using Geometry for Plant Phenotyping. Plant Methods 2019, 15, 103. [Google Scholar] [CrossRef]
- Kawamura, K.; Asai, H.; Yasuda, T.; Khanthavong, P.; Soisouvanh, P.; Phongchanmixay, S. Field Phenotyping of Plant Height in an Upland Rice Field in Laos Using Low-Cost Small Unmanned Aerial Vehicles (UAVs). Plant Prod. Sci. 2020, 23, 452–465. [Google Scholar] [CrossRef]
- Borra-Serrano, I.; De Swaef, T.; Quataert, P.; Aper, J.; Saleem, A.; Saeys, W.; Somers, B.; Roldán-Ruiz, I.; Lootens, P. Closing the Phenotyping Gap: High Resolution UAV Time Series for Soybean Growth Analysis Provides Objective Data from Field Trials. Remote Sens. 2020, 12, 1644. [Google Scholar] [CrossRef]
- Watanabe, K.; Guo, W.; Arai, K.; Takanashi, H.; Kajiya-Kanegae, H.; Kobayashi, M.; Yano, K.; Tokunaga, T.; Fujiwara, T.; Tsutsumi, N.; et al. High-Throughput Phenotyping of Sorghum Plant Height Using an Unmanned Aerial Vehicle and Its Application to Genomic Prediction Modeling. Front. Plant Sci. 2017, 8, 421. [Google Scholar] [CrossRef]
- Patrick, A.; Li, C. High Throughput Phenotyping of Blueberry Bush Morphological Traits Using Unmanned Aerial Systems. Remote Sens. 2017, 9, 1250. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; Jiménez-Brenes, F.M.; Arquero, O.; Lovera, M.; de Castro, A.I. An Efficient RGB-UAV-Based Platform for Field Almond Tree Phenotyping: 3-D Architecture and Flowering Traits. Plant Methods 2019, 15, 160. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; de la Rosa, R.; León, L.; Jiménez-Brenes, F.M.; Kharrat, A.; López-Granados, F. Quantification of Dwarfing Effect of Different Rootstocks in ‘Picual’ Olive Cultivar Using UAV-Photogrammetry. Precis. Agric. 2022, 23, 178–193. [Google Scholar] [CrossRef]
- de Castro, A.I.; Rallo, P.; Suárez, M.P.; Torres-Sánchez, J.; Casanova, L.; Jiménez-Brenes, F.M.; Morales-Sillero, A.; Jiménez, M.R.; López-Granados, F. High-Throughput System for the Early Quantification of Major Architectural Traits in Olive Breeding Trials Using UAV Images and OBIA Techniques. Front. Plant Sci. 2019, 10, 1472. [Google Scholar] [CrossRef]
- Hobart, M.; Pflanz, M.; Weltzien, C.; Schirrmann, M. Growth Height Determination of Tree Walls for Precise Monitoring in Apple Fruit Production Using UAV Photogrammetry. Remote Sens. 2020, 12, 1656. [Google Scholar] [CrossRef]
- Jayathunga, S.; Owari, T.; Tsuyuki, S. Evaluating the Performance of Photogrammetric Products Using Fixed-Wing UAV Imagery over a Mixed Conifer–Broadleaf Forest: Comparison with Airborne Laser Scanning. Remote Sens. 2018, 10, 187. [Google Scholar] [CrossRef]
- Camarretta, N.; Harrison, P.A.; Lucieer, A.; Potts, B.M.; Davidson, N.; Hunt, M. From Drones to Phenotype: Using UAV-LiDAR to Detect Species and Provenance Variation in Tree Productivity and Structure. Remote Sens. 2020, 12, 3184. [Google Scholar] [CrossRef]
- de la Rosa, R.; León, L.; Guerrero, N.; Rallo, L.; Barranco, D. Preliminary Results of an Olive Cultivar Trial at High Density. Aust. J. Agric. Res. 2007, 58, 392–395. [Google Scholar] [CrossRef]
- Tous, J.; Romero, A.; Plana, J.; Hermoso, J.F. Olive Oil Cultivars Suitable for Very-High Density Planting Conditions. Acta Hortic. 2008, 791, 403–408. [Google Scholar] [CrossRef]
- Silva, C.; Klauberg, C.; Mohan, M.; Bright, B. LiDAR Analysis in R and rLiDAR for Forestry Applications. Lidar Remote Sens. Environ. Monit 2018, 404, 1–90. [Google Scholar]
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. lidR: An R Package for Analysis of Airborne Laser Scanning (ALS) Data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Pérez-Ruiz, M.; Rallo, P.; Jiménez, M.R.; Garrido-Izard, M.; Suárez, M.P.; Casanova, L.; Valero, C.; Martínez-Guanter, J.; Morales-Sillero, A. Evaluation of Over-The-Row Harvester Damage in a Super-High-Density Olive Orchard Using On-Board Sensing Techniques. Sensors 2018, 18, 1242. [Google Scholar] [CrossRef] [PubMed]
- Underwood, J.P.; Hung, C.; Whelan, B.; Sukkarieh, S. Mapping Almond Orchard Canopy Volume, Flowers, Fruit and Yield Using Lidar and Vision Sensors. Comput. Electron. Agric. 2016, 130, 83–96. [Google Scholar] [CrossRef]
- Rallo, L.; Barranco, D.; de la Rosa, R.; León, L. ‘Chiquitita’ Olive. HortScience 2008, 43, 529–531. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Origin | Date | Crown Parameter | Mean | Maximum | Minimum | Standard Deviation |
|---|---|---|---|---|---|---|
| LiDAR | November 2022 | Height (m) | 1.61 | 1.94 | 1.22 | 0.20 |
| Area (m2) | 1.89 | 3.02 | 0.72 | 0.49 | ||
| Volume (m3) | 1.93 | 3.86 | 0.54 | 0.77 | ||
| January 2023 | Height (m) | 1.62 | 1.93 | 1.35 | 0.18 | |
| Area (m2) | 1.88 | 2.83 | 1.01 | 0.43 | ||
| Volume (m3) | 1.75 | 3.46 | 0.64 | 0.65 | ||
| Field | November 2022 | Height (m) | 1.98 | 2.47 | 1.57 | 0.25 |
| Area (m2) | 1.75 | 2.88 | 0.96 | 0.50 | ||
| Volume (elliptic cyl.) (m3) | 2.09 | 4.26 | 0.73 | 0.90 | ||
| Volume (ellipsoid) (m3) | 1.68 | 3.44 | 0.37 | 0.63 | ||
| January 2023 | Height (m) | 1.92 | 2.38 | 1.54 | 0.25 | |
| Area (m2) | 1.85 | 2.88 | 0.97 | 0.50 | ||
| Volume (elliptic cyl.) (m3) | 2.10 | 4.11 | 0.93 | 0.84 | ||
| Volume (ellipsoid) (m3) | 1.70 | 3.12 | 0.55 | 0.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cantón-Martínez, S.; Mesas-Carrascosa, F.J.; Rosa, R.d.l.; López-Granados, F.; León, L.; Pérez-Porras, F.; Páez, F.C.; Torres-Sánchez, J. Evaluation of Canopy Growth in Rainfed Olive Hedgerows Using UAV-LiDAR. Horticulturae 2024, 10, 952. https://doi.org/10.3390/horticulturae10090952
Cantón-Martínez S, Mesas-Carrascosa FJ, Rosa Rdl, López-Granados F, León L, Pérez-Porras F, Páez FC, Torres-Sánchez J. Evaluation of Canopy Growth in Rainfed Olive Hedgerows Using UAV-LiDAR. Horticulturae. 2024; 10(9):952. https://doi.org/10.3390/horticulturae10090952
Chicago/Turabian StyleCantón-Martínez, Susana, Francisco Javier Mesas-Carrascosa, Raúl de la Rosa, Francisca López-Granados, Lorenzo León, Fernando Pérez-Porras, Francisco C. Páez, and Jorge Torres-Sánchez. 2024. "Evaluation of Canopy Growth in Rainfed Olive Hedgerows Using UAV-LiDAR" Horticulturae 10, no. 9: 952. https://doi.org/10.3390/horticulturae10090952