Abstract
Breeding and selection of nursery plants require evaluation of a wide variety of traits. Characteristics that are visually scored in the field include aesthetic beauty as well as tolerance to (a)biotic stresses, among others. This work proposes methodologies based on vegetation indices and canopy height data derived from visual imagery captured using an RGB (red, green, blue) camera embedded in a drone to rank and select genotypes. This approach relies on quantitative evaluation standards that exclude breeder bias and speed up data collection. A proof of concept for nursery plants was developed in two woody ornamentals: sweet box (Sarcococca Lindl.) and garden rose (Rosa L.). This work aimed to compare methodologies and to propose how drones (unmanned aerial vehicles, UAV) and high throughput field phenotyping (HTFP) can be used in a commercial plant selection program. Data was gathered in 2019 in three well-established breeding trials, two for sweet box and one for rose. Characteristics discussed include plant architecture traits such as plant height and shape in the sweet box and rose as well as floribundity, continuous flowering and disease resistance in roses. Correlations were calculated between on-ground measurements and UAV-derived methods, obtaining significant results. The advantages and disadvantages of the methodology and the approach for each of the traits are discussed.
Keywords:
UAV; drone; image analysis; HTFP; nursery plant; ornamental; plant breeding; plant architecture; flowering; disease resistance 1. Introduction
Interest in and the use of drones (unmanned aerial vehicles, UAV) have dramatically increased over the last decade. Advances have been made in the development of image capture, open-source spatial data analysis tools, and (affordable) sensors, creating many opportunities for more in-depth non-destructive high throughput field phenotyping (HTFP). These advances can accelerate breeding and selection [1,2]. Particularly when using UAV, images can be collected at a higher spatial and temporal resolution than with other remote sensing platforms. Drones and other proximal sensing installations equipped with sensors are widely used in agronomic crops to monitor crop growth and development [2]. More specific applications for agricultural crops include biotic and abiotic stress detection [3,4,5,6], biomass estimation and agricultural traits [7,8,9,10], ground cover estimation and growth monitoring [11,12], grain yield prediction [13] and evaluation of other yield components such as spike density and number of kernels [14,15], among others.
In horticulture (including cultivation of woody ornamentals and nursery plants), crop monitoring, pesticide treatments, crop inventory, sales and marketing, phenotyping, and selection of traits in breeding programs would benefit from increased automation [16]. However, the use of UAVs in horticulture is not largely exploited, mostly due to the small size of production areas and the diversity of crops and cultivation systems [16]. In addition, for nursery plants, market shares of individual crops are sometimes too limited to justify the use and costs of these technologies. Currently, the use of drones is limited to economically important fruit trees and orchards [17] to study water stress (in vines, olive, citrus, almond, apricot, peach, lemon, and orange orchards), to monitor diseases to support spray management decisions (in olive orchards and vineyards), to monitor the crop and weeds (in vineyards, apple, orange, and olive orchards) ([16] and references herein), to evaluate tree architecture and flowering (in almond [8]), to estimate height and site-specific crop management (of grapevine [7]), and to evaluate the impact of different pruning strategies on canopy area, tree height and crown volume (plant architecture) over time (in olive production or breeding [18,19,20]).
For woody ornamentals, to the best of our knowledge, small UAVs have only been used to identify water-stressed and non-stressed containerized ornamental shrubs of 6 different species [21], to count plants [22], and remotely sensed images were used to assess the effect of irrigation salinity on Hibiscus rosa-sinensis L. and Mandevilla splendens (Hook. f.) Woodson [23]. Furthermore, only a few lab-scale phenotyping studies in breeding programs of woody plants have been done using image capture and analysis in roses [24], Rhododendron L. [25,26], and Escallonia Mutis ex L.f. [27,28]. The use of drones in woody ornamental breeding programs is not reported, although it could improve and, in some cases, even speed up the multi-year breeding and selection process. For many phenotypic parameters, quantitative and objective evaluation standards can be improved by using image analysis [29], which excludes visual selection and breeder bias. The major cost areas of phenotyping are plant handling and labor; total costs per pot or microplot are similar in robotized platforms or field experiments with drones and hand-held or robotic ground vehicles [30]. The cost of vehicles carrying sensors is only 5% to 26% of the total cost, and data analysis represents 10% to 20% of the total costs in cases where pipelines are already available. Although there is an initial high cost for pipeline development compared to labor costs of manual operations [30], this will result in usefully integrating the enormous volume and velocity of imaging and remote-sensing data generated by automated phenotyping into breeding programs.
In this study, we aim to discuss the use of UAV-based image analysis on relevant traits for woody ornamental nursery plants to support selection in breeding programs. Case studies were developed on Sarcococca spp. (sweet box or Christmas box) and Rosa hybrids (garden roses) represent two important segments for nursery plants, evergreen and flowering shrubs. Sarcococca is a genus of 11 species in the family Buxaceae that contains evergreen, winter-flowering shrubs with strongly scented flowers. Species are cultivated to be used as a groundcover or are planted as low hedges. Sarcococca breeding mainly focuses on growth habits, i.e., compact growth, round shape, uniformity, and leaf greenness [31]. For garden roses, besides selection for positive and novel traits such as attractive flower color and flower shape, disease resistance (e.g., resistance to black spot, Diplocarpon rosae Wolf, a cause of leaf drop), uniform plant architecture and flowering characteristics like floribundity (the abundant production of flowers on each branch), and continuous blooming are the most important traits in breeding [32]. In ongoing breeding programs in Sarcococca and garden roses, a UAV equipped with an RGB (Red, Green, Blue) camera and subsequent image analysis was evaluated to determine plant density and compactness in Sarcococca. It was also evaluated its value in assisting in the selection of garden roses for plant architecture, flowering, and disease resistance. The correlation between on-ground measurements and data obtained from UAV image analysis was examined. Based on these experiences and observations, best practices, and recommendations for setting up UAV experiments for woody ornamentals are presented and discussed below.
2. Materials and Methods
2.1. Plant Material and Field Trials
For Sarcococca, different species were used as parent plants in the breeding program: confusa Lindl. (S1, S12), saligna (D. Don) Mull.-Arg. (S4, S10), wallichii Stapf (S5), ruscifolia Stapf var. chinensis (S6), ruscifolia ‘Dragon Gate’ (S7), hookeriana Baill. var. digyna (S08), hookeriana var. humilis (S9), orientalis Wu (S3, S11), humilis Stapf (S16) [31]. Seeds from interspecific crosses and open pollinations were harvested and sown (summer of 2014 and 2015) as described in [31]. Year-old seedlings were planted on the field (spring 2016 or 2017) under natural conditions (Melle, Belgium, lat. 50.59 N, long. 3.47 E) at a planting distance of 30 cm. Morphological examination (see below) was performed in 2019 on individual genotypes that are two (Experiment 1, SarcoE1) or three (Experiment 2, SarcoE2) years established on the field (Figure 1). Field trials are composed of 552 plants in SarcoE1 and 583 plants in SarcoE2 (Table S1).
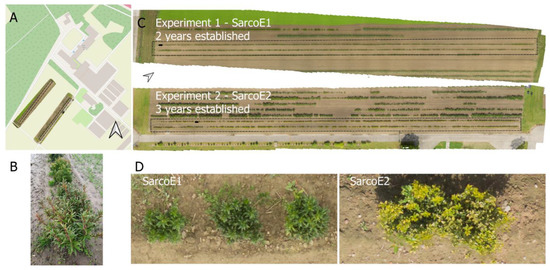
Figure 1.
(A) Location of the two Sarcococca trials; (B) Sarcococca plants in the field; (C) SarcoE1 and SarcoE2 indicated with black dashed lines; and (D) close-up of the established plants (from the location marked in C with a black rectangle).
Cultivation of the rose genotypes was started in the winter of 2015–2016 by planting the rootstock Rosa canina L. ‘Pfänder’ in seven rows on a selection field (Melle, Belgium lat. 50.59 N, long. 3.46 E). In July 2016, the rootstock was budded with 87 different floribunda and shrub rose genotypes obtained from cross hybridizations created in the years 2007 to 2014. Seedlings obtained from cross hybridizations were clonally multiplied by winter grafting in the first year after sowing and T-budding in July of all following years. During the winter prior to the UAV flights and on-ground evaluation, the plants were pruned to approximately 20 cm. Plants of the same genotype (between 1 and 51 plants/genotype) succeed each other in a row. Seventy-five rose genotypes with more than seven plants (in total, 1646 plants) were included in the observations. The three-year-old plants were evaluated per genotype with UAV imagery and on-ground observations in 2019. An overview of the trial is shown in Figure 2.
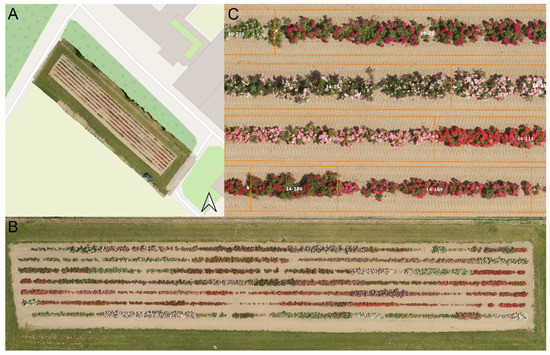
Figure 2.
(A) Location of the rose trial; (B) Orthophoto of the entire trial based on a UAV flight done on 1 July 2019; (C) detail of a part of the trial with polygons defining the different genotypes.
For both plant species, Sarcococca and Rosa, morphological characteristics were evaluated as described in Table 1. In the rose field, the plants were evaluated per genotype, whereby one genotype was represented by different cloned plants, while for Sarcococca, each plant was evaluated as an individual genotype.

Table 1.
Overview of the morphological characteristics evaluated for Sarcococca and Rosa.
2.2. On-Ground Morphological Measurements
For Sarcococca, an evaluation was made for plant architecture based on plant height and plant shape. For this, the maximum plant height (GR_Hmax = height of the longest branch, measured from the soil to the top of the branch), average plant height (GR_Hmean = height of the plant measured from the soil to the top of the plant excluding protruding branches) and plant width in two perpendicular directions (in the direction of the line and 90°, GR_W1 and GR_W2) were manually measured on the individual plants using a ruler. In June 2019, 94 genotypes from SarcoE1 and 583 from SarcoE2, and in September 2019, only 94 genotypes from SarcoE1 were measured. Manual on-ground plant area (GR_Area) was calculated by multiplying the two plant widths (Table S2).
In the rose trial, on-ground measurements for plant architecture were based on two parameters: plant height and plant uniformity (Table S2). On 5 September, canopy height and height uniformity were assessed for the 75 individual genotypes of the rose breeding trial. Canopy height (GR_Hmax) was measured using a ruler from the soil to the top of the plant. Plant height uniformity (GR_U) was scored in the week of 5 September using a range between 0–3, whereby uniformity was lowest with a score of 0 and highest in plants with a score of 3. Floribundity was quantified by the visual evaluation of flower abundance at a single time point. Floribundity at consecutive time points during summer is used to assess continuous flowering. On-ground scoring of floribundity was done by estimating the total number of flowers showing color or the amount of color on the plant as a percentage in 10% steps. Another scoring evaluated the flowering stages whereby a total score of 100% is divided over 4 stages: (1) no buds, (2) buds, (3) open flowers, and (4) faded flowers. This makes it possible to estimate repeated flowering as, ideally, the plants develop new buds as the old buds fade. Data for floribundity were collected during week 32 (5 August). Data for flowering stages in week 28 (8 July ), week 32 (5 August), and week 36 (2 September). The assessment of black spot infestation on the rose genotypes was scored using two parameters. Typically, the disease appears during the rainy period in autumn, starting at the bottom of the plant and traveling upwards, with black leaf spots first developing, followed by the leaf drop. Therefore, the first score is related to the detection of black spots on the leaves (leaf spot, GR_BSS). The leaf spot score ranges from 0 to 3, with 0 indicating no black spots present on the leaves and 3 indicating a severe infestation. The second score is based on the resulting effect of the black spot disease being early leaf drop (GR_BSD) and showing only bare stems too early in the season. The leaf drop score ranges from 0 to 3, with 0 indicating no leaf drop and 3 indicating severe leaf drop. Plants infected by rust earlier in the season were excluded from the analysis. Thus only 66 genotypes were scored. Black spot was scored on 20 August (early disease development) and 15 October (full disease pressure).
2.3. UAV Flights and Image-Based Morphological Measurements
For both case studies, a UAV DJI Matrice 600 Pro (DJI, Shenzhen, China) platform equipped with an RGB (visible spectral range) camera (model α6000, Sony Corporation, Tokyo, Japan) with 6000 × 4000 pixels and a 35 mm lens was used to capture the images at 20 m flight height with 80% overlap (forward-lap and side-lap) at a speed of 1.8 m/s. The settings of the RGB camera (shutter speed, aperture, and ISO) were adjusted in the field before the flight, and the sensor was triggered automatically based on flight planning. Correction for white balance and exposure was applied to the images using Lightroom v6.5. (Adobe Systems Incorporated, San Jose, CA, USA) using a gray reference card (18% reference gray, Novoflex Präzisionstechnik GmbH, Memmingen, Germany) placed in the field during the flight campaign prior to processing with Agisoft Photoscan v1.2.6 Professional Edition (Agisoft LLC, St. Petersburg, Russia) to build the orthophoto and digital elevation model (DEM) with the coordinates of nine ground control points (GCP). In addition, for Sarcococca, a digital terrain model (DTM) with the same spatial resolution as the DEM was built based on point classification (in Agisoft Photoscan) to calculate the Canopy Height Model (CHM) for each date by subtracting the DTM from the DEM. For the rose trial, the DTM was interpolated based on the nine GCPs using the TIN interpolation tool available in QGIS. The data extraction for both cases and interpolation were done in QGIS 3.18.2 (QGIS.org, 2021. QGIS Geographic Information System. QGIS Association. http://www.qgis.org, accessed on 20 April 2021).
For Sarcococca, one UAV flight was executed per field, over SarcoE1 on 5 September and over SarcoE2 on 29 May 2019. The spatial resolution for the orthophoto and the DEM (both flights) was 0.2 cm and 1.5 cm, respectively. From the CHM, the mean and Q90 height values (UAV_Hmean and UAV_HQ90) of all individual plants were extracted. Other parameters derived from the orthophoto were the (top) plant area (UAV_Area) and the surrounding box dimensions and area (UAV_B1, UAV_B2, and UAV_BoxArea).
For roses, the UAV flights were performed on 5 September 2019 for height estimation and plant uniformity. In the CHM, a threshold of 25 cm was set to eliminate weeds and remove the soil within the defined polygons. Each polygon included the plants of one genotype. Only polygons with at least 0.5 m2 of plants or >7 plants were kept for the analysis. This results in 71 polygons/genotypes being evaluated. For every polygon, the 90th quantile of the height (UAV_HQ90) was calculated, allowing assessment of the top of the canopy, excluding real extreme height values. The coefficient of variation (UAV_Hcv) was calculated to assess plant height uniformity.
A relevant trait In roses is the number/percentage of flowers; abundant and continuous flower coverage is preferred. Therefore, three flights were considered to estimate the flower coverage over time (1 July, 6 August, and 5 September). An evaluation was done to select the most appropriate index (between 12 common RGB indices) or spectral band to separate colors. The highest f-values were obtained for the Rband and the Woebbecke index (WBI = G − B/R − G [33]). A clear separation between green (leaves) and the other colors (flowers) was observed (Figure S1). The overlap between the soil and flower colors is not a problem, as the pixels representing soil were not considered (a threshold based on the CHM was applied to remove them first). The pixel classification was done using a threshold to separate the pixels corresponding to green leaves and flowers. The number of pixels for the entire plant (leaves and flowers included) and the ones classified as flowers was extracted (Figure S2). The proportion between the two sets of pixels was calculated to obtain the percentage. A comparison between flowering based on on-ground scores and UAV data is presented in Section 3.2 below for a set of the genotypes.
On the same date of on-ground scoring of black spot infestation (15 October 2019), a UAV flight was carried out and compared with the UAV flight of 20 August to evaluate the progress of black spot development. These dates are used for evaluation of black spot occurrence as the disease typically develops most symptoms at the end of the season resulting in an early leaf drop. Based on the RGB orthophoto, the Excess Green vegetation index was calculated (UAV_ExG = 2 * G − R− B/R + G + B [33]). The median value of ExG was determined for every genotype (only considering pixels corresponding to vegetation based on the threshold applied to the canopy height model). For every genotype, the canopy cover (UAV_CC) of 20 August was used as a mask to assess leaf loss on 15 October. Then the UAV_ExG values were compared for both dates within the mask, using the first date as a reference.
2.4. Comparison between On-Ground and Image-Based Trait Measurements and Application as Selection Criteria
The ideal Sarcococca plant is compact and has a spherical shape. Plant evaluation was therefore based on compactness, height uniformity, and plant shape. To validate the UAV image-based trait measurements and evaluate their performance in plant selection, the UAV-based measurements were correlated to the on-ground measurements. For compactness (or circular shape), the ratio between the perpendicular widths, manually measured in the field (GR_Wratio) and derived from the image-derived surrounding box (UAV_Bratio), was calculated. For height uniformity, the ratio between the maximum and mean height manually measured in the field (GR_Hratio) was used and compared to the height derived from the CHM (UAV_Hratio). Another way to evaluate height uniformity is by the coefficient of variation (UAV_Hcv), which was possible to derive from the detailed UAV imagery (average 250 pixels per plant for the CHM). Variability among half-sib families (originating from the same mother plant) was evaluated by data distributions (box plots) in both on-ground and UAV measurements to determine the value of the mother plant for the future breeding program. In SarcoE2, after 3 years of field evaluation, a final selection of 12 plants was made in collaboration with Sarcococca growers. This selection, which was based on field inspection and intuition, was evaluated in this study based on defined selection criteria, which combines all parameters measured and is compared to a similar selection based on UAV data.
For roses, the ideal plant has a uniform canopy height, shows a high floribundity throughout the season (continuous flowering), and is resistant to diseases. Plant height is not a selection criterion but helps to assign roses for specific use (e.g., smaller roses can be used as a potted patio plant). Correlations between on-ground and UAV canopy height were calculated as well between uniformity scores and UAV_Hcv. The flower percentage derived from UAV imagery was compared to the visual scoring during three different weeks and continuity during summer. Resistance to black spot was compared by correlating on-ground scores with UAV_ExG. Leaf loss was calculated based on the UAV_CC of an earlier date. As a final selection was carried out, these results mainly focused on genotypes with good uniformity, high floribundity, continuous flowering, and resistance to black spot.
2.5. Statistical Analysis and Representation of the Data
Statistical analysis was carried out in R v3.6.3 using rStudio v1.2.5033 (rStudio: Integrated Development Environment for R, rStudio Inc., Boston, MA, USA). All phenotypic variables’ names and definitions can be found in the supplementary information (Table S2). For calculating correlations based on continuous data, a Pearson’s correlation was used; if discrete data (i.e., scores) were included, then the Spearman method was used.
3. Results
3.1. Phenotyping Capturing Plant Architecture
For Sarcococca, manual measurements and UAV-derived parameters were performed to capture plant architecture. Correlations between all measurements determined on Sarcococca on SarcoE1 (94 individual plants) are shown in Figure 3A. In the case of SarcoE2 (583 plants), it was difficult to separate plants with connected canopies; therefore, results on SarcoE2 are not shown. A significant correlation of 0.63 was obtained between the on-ground and UAV height measurements and 0.69 for plant area (SarcoE1 plants). In Figure 3B, linear relations between on-ground and UAV measurements specific for canopy height and plant area are shown. The general trend showed lower values derived from the UAV data, as the points were not on the 1-1 line. This is partially explained by the difference between how measurements were done manually in the field and those derived from the images.
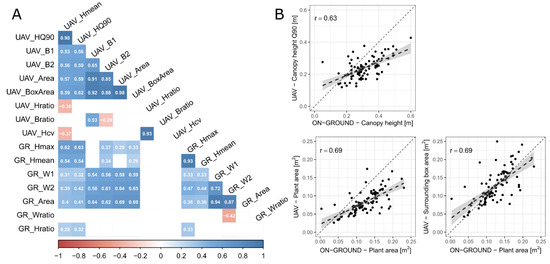
Figure 3.
(A) Correlogram and (B) linear relations between on-ground measurements and UAV-derived plant architectural (plant height and width) parameters in Sarcococca, SarcoE1 (n = 94 plants). For the abbreviations, see Table S2.
Assessment of plant architecture for the rose genotypes was done using ruler-based measurements (canopy height, GR_Hmax) and visual scores (plant uniformity, GR_U), as well as with the data extracted from the images taken by the UAV. UAV_HQ90 correlates very well (r = 0.73 and p < 0.01) with the ruler-based measurements (Figure 4A). The height based on UAV_HQ90 is similar for less tall plants and lower for taller plants compared to the on-ground measurements. Related to the uniformity, we found a significant negative correlation between the uniformity score and the UAV_Hcv (r = −0.38; Figure 4B) for the observations on 5 September. This is to be expected as plants that received a lower score is less uniform.
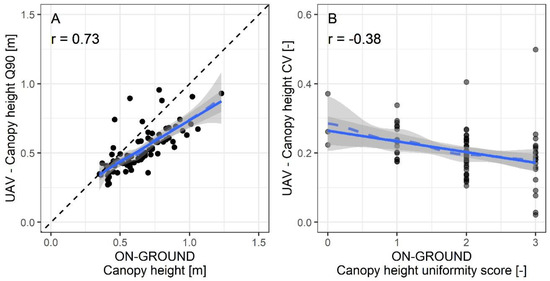
Figure 4.
(A) Correlations between the manually measured canopy height (GR_Hmax) and the drone-derived canopy height (UAV_HQ90) in the rose trial, and (B) between the visual score of the canopy height uniformity (GR_U) and the drone-derived canopy height coefficient of variation (UAV_Hcv), respectively, for 5 September 2019.
3.2. Phenotyping: Capture of Flowering
When flowering is scored visually in the field, several parameters are considered in the final score, which has to be parsed to match data derived from UAV imagery (e.g., the relation between the number of flowers showing color and the size of the flower, different stages of flowering). The approach we took distinguished between flowers and other plant parts. A pixel classification in two classes (leaf or flower) was carried out based on the Rband threshold to differentiate colors. Then the percentage of flowers was calculated as the ratio between the pixels corresponding to the entire bush or canopy cover (UAV_CC) and the ones classified as a flower. Based on the percentage of flowers (at a single time point or multiple to catch the evolution during the flowering period), a comparison could be made between genotypes, and the ones with repeated flowering could be selected by evaluating different dates. A comparison between the on-ground scores and the percentage of flowers derived from the UAV imagery is presented for a representative selection of genotypes (Figure 5). In the graph based on UAV data, the three time points are clearly distinguishable, and the trend of the flowering can be derived. More blooms in week 27, a subsequent decrease with almost no presence of flowers in week 32, and a mild second blooming event in week 36 were observed. This trend is hardly observable using the on-ground scores where the flowering stages were used. According to the flowering stages across all genotypes, in week 28, 17% of the genotypes had buds, 30% had open flowers, and 51% were fading; in week 32, only 14% had open buds, and 66.9% were fading; and in week 36, 19% had open buds, and 56% had faded flowers. The correlation between the on-ground scores for color and open buds in week 32 is 0.73.
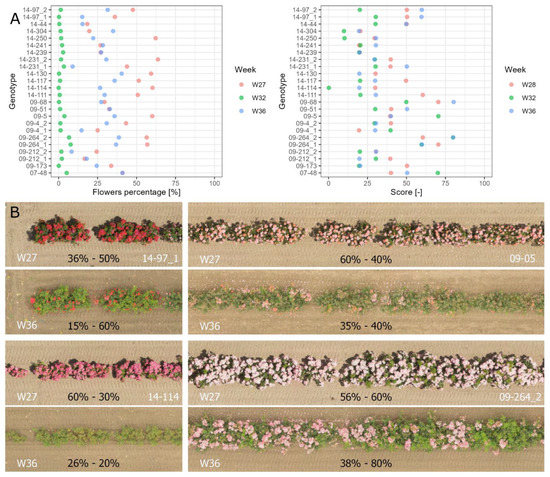
Figure 5.
(A) Evolution of flower percentage and scores per week for a set of genotypes and (B) imagery of four genotypes in the first and last week with percentages derived from the UAV imagery and scores.
3.3. Assessment of Black Spot Occurrence
Genotypes are scored on-ground for leaf spots and leaf drops to determine the severity of black spot disease. The correlation between the two on-ground measured scores on 15 October was 0.79 (p < 0.01), showing a significant link as expected. As an alternative for the scoring, we tested the correlation between both on-ground determined scores and the UAV median ExG for the same date. This resulted in a negative correlation of −0.74 and −0.76 (both p < 0.01) with the leaf spot and the leaf drop scores, respectively. This indicated that the canopy was less green and showed increased disease symptoms. This demonstrates the clear link between the variables and the ability of UAV data to quantify disease severity between the genotypes in the breeding trial. Figure 6 compares the ExG values of the reference date versus the black spot assessment date in autumn. The figure clearly shows that interesting genotypes (green dots above the line) had an increase in canopy instead of leaf drop.
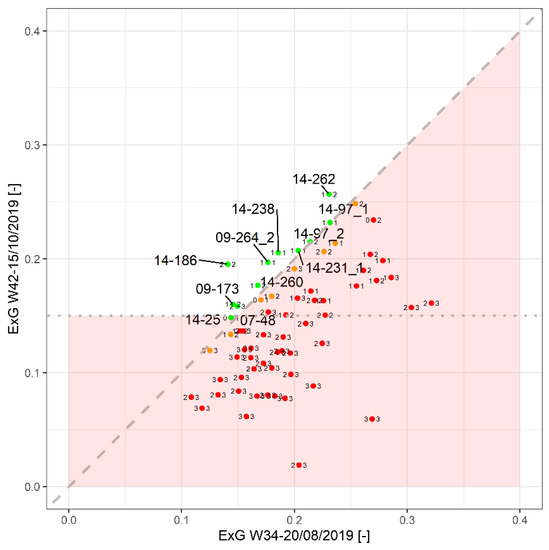
Figure 6.
Evaluation of black spot disease in rose genotypes. All dots on and above the 1:1 line represent genotypes where the ExG value in the middle of October is equal to or higher than at the end of August (=reference) (green). Genotypes with an ExG reduction of ≤10% are shown in orange, or >10% reduction is indicated in red. For comparison, the scores of leaf spot and leaf drop per genotype (5 October 2019) are shown at the right or left of the symbol, respectively. The transparent red area indicates genotypes that can be omitted as they did not perform well for this trait (1:1 line and, e.g., a minimum ExG threshold for 5 October 2019 set by the breeder).
3.4. Application of UAV-Derived Parameters as Selection Criteria in Breeding Programs
Variability in families and populations is an important feature that allows for improved selections: the more segregation, the more progress can be made toward the creation of new cultivars. Figure 7 and Figure S3 give an overview of the variability per mother plant and trial for open-pollinated half-sib populations of Sarcococca. Most mother plants used in SarcoE1 and SarcoE2 trials produce offspring showing a large variation in canopy height and plant area.
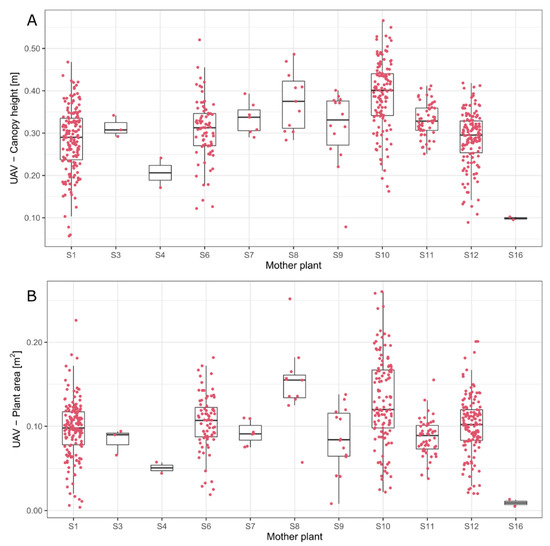
Figure 7.
Box plots per mother plant for all Sarcococca plants in SarcoE2 for (A) canopy height and (B) plant area. Every dot corresponds to an individual plant.
As a final step, plants were selected based on a visual inspection of the selection criteria. From the 3-year-old seedlings in SarcoE2, 12 seedlings were selected. A closer look at these selected plants compared to the rest of the seedlings from SarcoE2 is shown in Figure 8B. The plants selected by the breeders are mainly from S10 and S8 mother plants, taller (higher plants) and bigger (larger areas) than the median of all species. Aiming to select for compact seedlings with a round shape, “ideal” plant selection criteria can be defined as the following ranges: UAV_Hratio 1–1.5 (uniformity), UAV_Bratio 0.85–1.15 (compactness), UAV_Area 0.1–0.2, UAV_HQ90 0.3–0.45 and UAV_Hcv 0.2–0.5 (see blue rectangles in Figure 8B). A closer look at the resulting seedlings when combining all “ideal” selection criteria is presented in Figure S4. Three out of the 12 seedlings (nrs. 68, 175, 223) would be selected based on either UAV or on-ground field inspection.
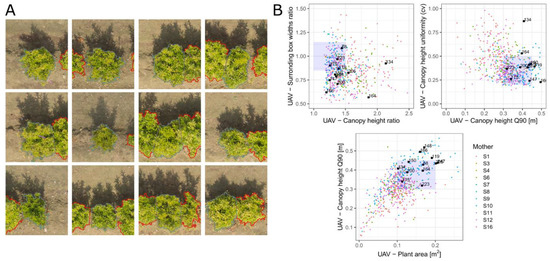
Figure 8.
(A) Sarcococca plants selected (blue border) in the field identified by a unique ID (SarcoE2) and (B) comparison with the rest of the plants. The blue rectangle corresponds to the defined “ideal” selection criteria.
For roses, an example of how the UAV data can be used to select plant growth habits based on canopy height and canopy uniformity can be seen in Figure 9.
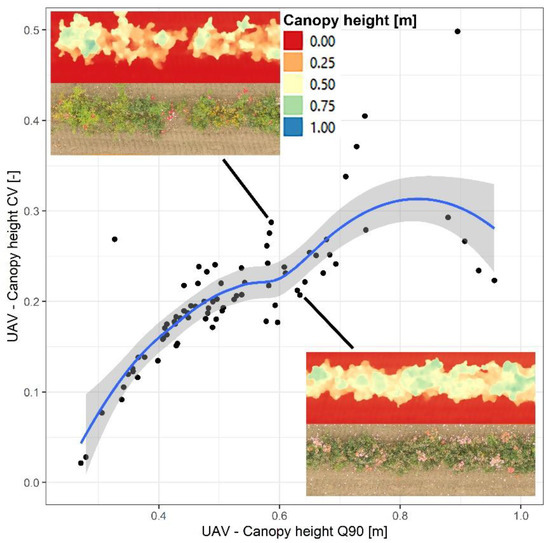
Figure 9.
Variations present in the rose trial related to canopy height (UAV_HQ90) and uniformity (UAV_Hcv) with a top view image and a height image based on the CHM for two genotypes.
A final selection of roses was made, and four roses were commercialized: ‘Mel Bee’ (09-264), ‘Bee Gold’ (09-212), ‘Bee Proud’ (09-05), and ‘Tsarina’ (09-173). ‘Mel Bee’ (09-264) was among the best-scoring genotypes for floribundity in on-ground and UAV evaluation showing high scores later in the season (Figure 5). For disease resistance, this genotype is also among the genotypes with increased ExG value (Figure 6). ‘Bee Proud’ (09-05) also is among the genotypes with high floribundity in the on-ground scores and UAV data (Figure 5). ‘Tsarina’ (09-173) and ‘Bee Gold’ (09-212) show average scores for floribundity. ‘Tsarina’ scores very well for disease resistance and was selected for its healthy dark foliage in combination with attractive flower color.
4. Discussion
The multitude of UAV phenotyping applications either currently under development or already applied in agricultural crops are paving the way for the introduction of UAV and image analysis in woody ornamental and nursery plant breeding programs. For woody ornamentals, breeding towards compactness, improved or novel leaf and flower morphology, abundant flowering, and improved resistance to diseases, drought, cold, and other abiotic stresses is important. Knowledge from many applications in agricultural crops, e.g., the capture of (a)biotic stress symptoms, biomass estimation, growth monitoring, spike density, etc., can be translated for use in woody ornamentals (reviewed in [34] and references herein). Major advantages of UAV imaging include the (high) resolution of the images (to mm), chosen depending on the feature being evaluated (e.g., a lower resolution is needed to infer plant area as compared to flower detection), the objectivity of UAVs compared to multiple experts involved in on-site scoring measurements, the possibility of automation, the available sensors with different spectral ranges and the fast and large-scale image capture.
4.1. Experimental Setup and UAV Image Capture according to Trait(s) under Evaluation
The diversity in crop types and species of nursery plants is enormous. Each demands a dedicated approach when it comes to the selection of specific characteristics. In our study, an RGB camera and the calculation of the canopy height model and a small number of vegetation indices were successful for the evaluation of traits related to plant architecture, biotic stress, and flowering. However, selection towards improved aesthetic characteristics, which is very important for ornamentals, depends on the type of plant considered: trees, shrubs, bushes, perennials, or cut flowers [29]. It is not always easy to capture “beauty” in numbers. The development of crop-specific tools is required, and a good experimental setup is essential to implement the use of UAV imagery for high-throughput phenotyping in this field. This involves, among other things, the timing of flights in accordance with the breeding cycle of the particular crop, the number of flights, sensor and flight settings linked to the specific trait of interest, and the field setup. Selection using UAV imagery could be used on single genotypes of the crop, as done in the case of Sarcococca, or in a later phase after clonal propagation of the plant material, as in the case of the garden rose. Instead of the evaluation of individual genotypes, the evaluation of families or populations can also be valuable, as done in Sarcococca. Information on the mother plants could be obtained by comparing different half-sib families. According to the objectives, one should also choose the appropriate unit of plant phenotyping in the field to maximize the efficiency of selection and the corresponding measurable genetic gain. Today the most common unit used is the multi-plant unit, i.e., a densely grown field plot. Another approach could be the selection of individual plants grown in the absence of competitive interactions to maximize phenotypic expression and the corresponding phenotypic variance [35]. The field setup should be adapted to the parameters examined using image analysis. In the case of Sarcococca, the architecture of the individual plants needed to be evaluated, which imposed a plant density that made it possible to distinguish individual plants for proper image analysis. In our study on Sarcococca, the SarcoE1 trial contained smaller and younger plants compared to the SarcoE2 trial. A planting distance of 30 cm for the SarcoE1 plants enabled the good separation of individual canopies. In contrast, for the SarcoE2, the plants were already too large to be separated on the UAV images. For roses, we used a selection field with the roses planted in rows according to standard practice in this crop. However, it could be useful to work with small square plots filled with plants, for example, to examine ground coverage via image analysis. In all cases, weeds must be removed before flights are carried out to facilitate image processing. Remote sensing technology could enable simultaneous selection at different locations, such as in cut rose breeding, where selection is performed remotely, and rose genotypes are sent to the most appropriate regions (e.g., South America or Africa) to be tested under specific conditions of altitude and climate [32].
The number of flights needed and the timing of the flights both depend on the trait under evaluation and require thorough consideration, including cost efficiency in phenotyping, as discussed by Reynolds et al. [30]. For plant architecture, as assessed in Sarcococca and rose, a single flight during the growing season could suffice. For dynamic traits like recurrent flowering or disease development, the assessment at different time points is essential [8]. In the example of black spot disease in rose, two time points were compared using the first time point as a reference. Symptoms of black spot mainly occur in autumn, and plant height uniformity shows more variation later in the season after the formation of new branches. In rose selection, flights for evaluation of the aforementioned traits are therefore best planned for the second half of the growing season (early autumn). Nursery plants are typically evaluated over several years in the same field [28]. Attention to the comparison of data obtained by image analysis over different years is required, as this can help to adjust plant evaluation in relation to year effects, e.g., differences in the type of weather during the season in outdoor selection. For UAV flights, a strict protocol (see description in the Section 2) needs to be followed, including stable light conditions during the flight to avoid unnecessary variability in the data. Recommendations about optimal flight parameters and settings to capture and generate accurate data have been assessed in several publications [36,37,38,39]. In our rose evaluation, the images from the flight carried out in W25 had to be discarded because of bad quality, while this week would have been ideal for evaluating flowering. The use of a multispectral camera allows for radiometric correction and can avoid this problem [10]. In addition to well-considered setups of the experiment and the field trial, the choice of parameter for the best estimation of the trait is also essential. For the evaluation of plant height uniformity, the coefficient of variation was found to be a better parameter than the standard deviation, as the former is normalized for the height of the plant and is, therefore, more comparable for plants with different plant heights, such as in roses.
4.2. UAV Imagery-Based Measurements Compared to On-Ground Measurements
In general, in our study, there was a good correlation between on-ground measurements and measurements based on UAV images. For example, leaf drop caused by black spot was assessed in roses and used to compare rose genotypes under selection. A high correlation of 0.79 with on-ground scores was found, which could support the implementation of this UAV-based methodology to quantify disease severity in a more standardized manner compared to on-ground evaluation. For some parameters, UAV imagery showed an underestimation or lower correlation. In Sarcococca, plant heights derived from UAV imagery are lower than from manual measurements in the field, which could be explained by the difficulty of modeling/detecting (“narrow”) individual branches (present in a high number in bigger plants) and the use of percentile Q90 to avoid possible outliers/errors from the DEM construction against the measurement of the tallest branch top of the individual plant. For the plant area in Sarcococca, differences between on-ground and UAV data can be explained by the simplification to calculate the area by multiplying the two directions plant width measurements (therefore, the correlation with the UAV box area is higher (rectangle shape)). However, the area estimated by the UAV is more accurate as it is possible to capture the border and the shape of the plants. For roses, a high correlation between the field measurements and UAV-derived heights was achieved. In roses also, the Q90 value of the CHM was used as this value gave the best correlation to the on-ground measurements, excluding possible outliers.
Discrepancies can arise between the selection by visual inspection and the selection by UAV imagery: the “ideal” criteria cannot be totally mimicked as these criteria are also influenced by (subjective) expert experience. For Sarcococca, one of the breeding goals was to select more compact varieties. But analysis of the selected plants chosen by the experts revealed that they had intuitively selected somewhat taller plants with bigger plant areas. Only 3 out of 12 manually selected plants would have been selected using UAV-based selection criteria for height and plant area. In the case of the evaluation of floribundity in roses, differences can arise if the experts are more interested in plant vitality or visual quality, which differs from counting all flowers regardless of their stage of development or only the fully open flowers [29]. In this work, UAV imagery evaluated the amount of color on the plant (number of pixels classified as vegetation with a different color than green). In contrast, visual inspection considered the number of individual flowers. For example, ‘Bee Gold’ (09-212), one of the selected and commercialized genotypes, is a mini or patio rose with a low canopy height. The single flowers in this genotype are small and yellow. Within this type of rose, it is more difficult to select good genotypes that combine floribundity with disease resistance. Therefore, it can be difficult to impose the criteria when imagery is used to evaluate flowering: e.g., buds not visible, different views (lateral vs. top). Specific analytical tools for specific subtypes of plants could be developed, e.g., floribunda roses (branched shrubs with large flower sprays) need another approach compared to hybrid tea roses, which have upright stems with a single large flower. A few large flowers could be seen in the images of the top and upper sides of the bush, and at the same time, a large number of flowers and buds could be seen from the side in the on-ground observation, thus leading to differences in the evaluation. An improved and better approach to capture the number of flowers per branch (as the 2D orthophoto does not give enough information) could be the use of 3D point clouds instead.
4.3. Possible Future Applications of UAV Imagery in Breeding Programs of (Woody) Ornamentals
Despite the remaining challenges associated with UAV imagery, many applications can already be valuable and useful for open-field selection in woody plant breeding programs. Breeding in woody ornamentals requires a cost-efficient system. Typically, in breeding woody plants, a long and costly observation period is required to accurately evaluate the performance of plant genotypes [32]. A more efficient and less labor-intensive selection, e.g., the use of UAV images, could improve effective knowledge acquisition of the genotypes and reduce costs over the long term. For morphological traits, such as fruit and berry development, plant shape and architecture, and flower characteristics in the entire bush, more detailed 3D reconstructions can be useful. 3D point-based deep learning models were used in synthetic rose bushes for the phenotyping of plant architecture and morphology [40]. This would be ideal for training models to relate architecture and flowering to aesthetic values. Furthermore, the use of multispectral and thermal sensors could allow the evaluation of (a)biotic stress symptoms in different crops. In container fields, water gift is essential, and in [41], the water stress of woody ornamentals grown on a container field was assessed using sensor technology. The effect of salinity has been observed by multispectral image analysis and the use of a normalized difference vegetation index (NDVI) calculated from the Near Infrared Reflectance (NIR) [23]. The detection of diseased plants due to biotic stress by use of remote sensing data [42] or by means of UAV [43] is a hot topic in plant cultivation and breeding, e.g., monitoring of powdery mildew in apple orchards [44] and monitoring of rust on coffee plants [45]. Although detection of disease emergence during the period of latency seems to be the current holy grail [42], in nursery plant breeding, this is less important, as the evaluation of the resistance and comparison between genotypes under selection is only carried out after some years on the field.
5. Conclusions
Using UAV-based measurements of plant characteristics for selection purposes has many advantages for breeding woody plants. Characteristics such as plant architecture, flowering, and disease resistance may be assessed more objectively and faster using UAV imaging as compared to expert on-ground observations. We have shown some of the advantages in case studies on an evergreen shrub, Sarcococca, a flowering garden plant, Rosa. Significant correlations (r > 0.65) were obtained between UAV imaging and on-ground measurements. Therefore, UAV-based phenotyping is valuable for traits such as plant height and shape, especially for large breeding trials. In addition, more detailed data on the trial, plots, and individual plants are obtained, which allows us to better examine variability and uniformity in plant architecture and flowering traits. Besides objective morphological assessment, disease evaluation using UAV data assists in the selection of resistant genotypes. In conclusion, with a well-considered design of the field trial and experiment, and with well-chosen parameters for explaining the traits based on different sensor types, many more useful applications can be developed for breeding and cultivation monitoring of woody ornamental plants to support selection.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/horticulturae8121186/s1, Table S1: Overview of Sarcococca genotypes under field evaluation; Table S2: Overview of the phenotypic parameters for Sarcococca and rose experiments; Figure S1: Evaluation of spectral bands and vegetation indices to separate colors. Separation of the colors by the index with the highest F-value (WBI); Figure S2: Flight 1 July, examples of genotypes with different flower colors with the classification of pixels as flower marked in yellow and bush area delimited in white in roses; Figure S3: Box plots per mother plant of all Sarcococca plants in SarcoE1 for (A) canopy height and (B) plant area. Every dot corresponds to a plant; Figure S4: UAV plants selected according to ”ideal” plant selection criteria (central part of the image) in Sarcococca.
Author Contributions
Conceptualization, I.B.-S., K.V.L., L.L. and P.L.; methodology, K.V.L., L.L., I.B.-S. and P.L.; validation, I.B.-S., K.V.L. and L.L.; formal analysis, I.B.-S. and P.L.; investigation, I.B.-S., K.V.L., L.L. and P.L.; resources, K.V.L. and L.L.; data curation, I.B.-S.; writing—original draft preparation, I.B.-S., K.V.L. and L.L.; writing—review and editing, I.B.-S., K.V.L., L.L. and P.L.; visualization, I.B.-S. and P.L.; supervision, I.B.-S.; project administration, K.V.L. and L.L.; funding acquisition, K.V.L. and L.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Acknowledgments
We thank the UAV pilot, the field workers, and the thesis students for their data-gathering efforts and Miriam Levenson for English language corrections.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Araus, J.L.; Kefauver, S.C.; Zaman-Allah, M.; Olsen, M.S.; Cairns, J.E. Translating High-Throughput Phenotyping into Genetic Gain. Trends Plant Sci. 2018, 23, 451–466. [Google Scholar] [CrossRef]
- Xie, C.; Yang, C. A Review on Plant High-Throughput Phenotyping Traits Using UAV-Based Sensors. Comput. Electron. Agric. 2020, 178, 105731. [Google Scholar] [CrossRef]
- Elazab, A.; Ordóñez, R.A.; Savin, R.; Slafer, G.A.; Araus, J.L. Detecting Interactive Effects of N Fertilization and Heat Stress on Maize Productivity by Remote Sensing Techniques. Eur. J. Agron. 2016, 73, 11–24. [Google Scholar] [CrossRef]
- di Gennaro, S.F.; Battiston, E.; di Marco, S.; Facini, O.; Matese, A.; Nocentini, M.; Palliotti, A.; Mugnai, L. Unmanned Aerial Vehicle (UAV)-Based Remote Sensing to Monitor Grapevine Leaf Stripe Disease within a Vineyard Affected by Esca Complex. Phytopathol. Mediterr. 2016, 55, 262–275. [Google Scholar] [CrossRef]
- Kerkech, M.; Hafiane, A.; Canals, R. Deep Leaning Approach with Colorimetric Spaces and Vegetation Indices for Vine Diseases Detection in UAV Images. Comput. Electron. Agric. 2018, 155, 237–243. [Google Scholar] [CrossRef]
- De Swaef, T.; Maes, W.H.; Aper, J.; Baert, J.; Cougnon, M.; Reheul, D.; Steppe, K.; Roldán-Ruiz, I.; Lootens, P. Applying RGB- and Thermal-Based Vegetation Indices from UAVs for High-Throughput Field Phenotyping of Drought Tolerance in Forage Grasses. Remote Sens. 2021, 13, 147. [Google Scholar] [CrossRef]
- de Castro, A.I.; Jiménez-Brenes, F.M.; Torres-Sánchez, J.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. 3-D Characterization of Vineyards Using a Novel UAV Imagery-Based OBIA Procedure for Precision Viticulture Applications. Remote Sens. 2018, 10, 584. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; Jiménez-Brenes, F.M.; Arquero, O.; Lovera, M.; De Castro, A.I. An Efficient RGB-UAV-Based Platform for Field Almond Tree Phenotyping: 3-D Architecture and Flowering Traits. Plant Methods 2019, 15, 160. [Google Scholar] [CrossRef]
- Borra-Serrano, I.; De Swaef, T.; Muylle, H.; Nuyttens, D.; Vangeyte, J.; Mertens, K.; Saeys, W.; Somers, B.; Roldán-Ruiz, I.; Lootens, P. Canopy Height Measurements and Non-destructive Biomass Estimation of Lolium Perenne Swards Using UAV Imagery. Grass Forage Sci. 2019, 74, 356–369. [Google Scholar] [CrossRef]
- Pranga, J.; Borra-Serrano, I.; Aper, J.; De Swaef, T.; Ghesquiere, A.; Quataert, P.; Roldán-Ruiz, I.; Janssens, I.A.; Ruysschaert, G.; Lootens, P. Improving Accuracy of Herbage Yield Predictions in Perennial Ryegrass with Uav-Based Structural and Spectral Data Fusion and Machine Learning. Remote Sens. 2021, 13, 3459. [Google Scholar] [CrossRef]
- Borra-Serrano, I.; De Swaef, T.; Aper, J.; Ghesquiere, A.; Mertens, K.; Nuyttens, D.; Saeys, W.; Somers, B.; Vangeyte, J.; Roldán-Ruiz, I.; et al. Towards an Objective Evaluation of Persistency of Lolium Perenne Swards Using UAV Imagery. Euphytica 2018, 214, 142. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Rizza, F.; Badeck, F.W.; Berton, A.; Delbono, S.; Gioli, B.; Toscano, P.; Zaldei, A.; Matese, A. UAV-Based High-Throughput Phenotyping to Discriminate Barley Vigour with Visible and near-Infrared Vegetation Indices. Int. J. Remote Sens. 2018, 39, 5330–5344. [Google Scholar] [CrossRef]
- Kefauver, S.C.; Vicente, R.; Vergara-Díaz, O.; Fernandez-Gallego, J.A.; Kerfal, S.; Lopez, A.; Melichar, J.P.E.; Serret Molins, M.D.; Araus, J.L. Comparative UAV and Field Phenotyping to Assess Yield and Nitrogen Use Efficiency in Hybrid and Conventional Barley. Front. Plant Sci. 2017, 8, 1733. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of Plant Density of Wheat Crops at Emergence from Very Low Altitude UAV Imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef]
- Fernandez-Gallego, J.A.; Lootens, P.; Borra-Serrano, I.; Derycke, V.; Haesaert, G.; Roldán-Ruiz, I.; Araus, J.L.; Kefauver, S.C. Automatic Wheat Ear Counting Using Machine Learning Based on RGB UAV Imagery. Plant J. 2020, 103, 1603–1613. [Google Scholar] [CrossRef] [PubMed]
- Robbins, J.A. Small Unmanned Aircraft Systems (SUAS): An Emerging Technology for Horticulture. Hortic. Rev. (Am. Soc. Hortic. Sci.) 2018, 45, 33–71. [Google Scholar] [CrossRef]
- Zhang, C.; Valente, J.; Kooistra, L.; Guo, L.; Wang, W. Orchard Management with Small Unmanned Aerial Vehicles: A Survey of Sensing and Analysis Approaches. Precis. Agric. 2021, 22, 2007–2052. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; Castro, A.I.; Torres-Sánchez, J.; Serrano, N.; Peña, J.M. Quantifying Pruning Impacts on Olive Tree Architecture and Annual Canopy Growth by Using UAV-Based 3D Modelling. Plant Methods 2017, 13, 55. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Varela, R.; de la Rosa, R.; León, L.; Zarco-Tejada, P. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef]
- De Castro, A.I.; Rallo, P.; Suárez, M.P.; Torres-sánchez, J.; Casanova, L.; Jiménez-brenes, F.M.; Morales-sillero, A.; Jiménez, M.R.; López-granados, F. High-Throughput System for the Early Quantification of Major Architectural Traits in Olive Breeding Trials Using UAV Images and OBIA Techniques. Front. Plant Sci. 2019, 10, 1472. [Google Scholar] [CrossRef]
- Freeman, D.; Gupta, S.; Hudson Smith, D.; Maja, J.M.; Robbins, J.; Owen, J.S.; Peña, J.M.; de Castro, A.I. Watson on the Farm: Using Cloud-Based Artificial Intelligence to Identify Early Indicators of Water Stress. Remote Sens. 2019, 11, 2645. [Google Scholar] [CrossRef]
- Bayraktar, E.; Basarkan, M.E.; Celebi, N. A Low-Cost UAV Framework towards Ornamental Plant Detection and Counting in the Wild. ISPRS J. Photogramm. Remote Sens. 2020, 167, 1–11. [Google Scholar] [CrossRef]
- Yu, X.; Her, Y.; Chang, A.; Song, J.-H.; Campoverde, E.V.; Schaffer, B. Assessing the Effects of Irrigation Water Salinity on Two Ornamental Crops by Remote Spectral Imaging. Agronomy 2021, 11, 375. [Google Scholar] [CrossRef]
- Li-Marchetti, C.; Le Bras, C.; Chastellier, A.; Relion, D.; Morel, P.; Sakr, S.; Oyant, L.H.-S.; Crespel, L. 3D Phenotyping and QTL Analysis of a Complex Character: Rose Bush Architecture. Tree Genet. Genomes 2017, 13, 112. [Google Scholar] [CrossRef]
- Susko, A.Q.; Rinehart, T.A.; Bradeen, J.M.; Hokanson, S.C. An Evaluation of Two Seedling Phenotyping Protocols to Assess PH Adaptability in Deciduous Azalea (Rhododendron Sect. Pentanthera G. Don). HortScience 2018, 53, 268–274. [Google Scholar] [CrossRef]
- Wang, S.; Leus, L.; Lootens, P.; Van Huylenbroeck, J.; Van Labeke, M.-C. Germination Kinetics and Chlorophyll Fluorescence Imaging Allow for Early Detection of Alkalinity Stress in Rhododendron Species. Horticulturae 2022, 8, 823. [Google Scholar] [CrossRef]
- Denaeghel, H.E.R.; Van Laere, K.; Leus, L.; Lootens, P.; Van Huylenbroeck, J.; Van Labeke, M.C. The Variable Effect of Polyploidization on the Phenotype in Escallonia. Front. Plant Sci. 2018, 9, 354. [Google Scholar] [CrossRef] [PubMed]
- Van Laere, K.; Hokanson, S.C.; Contreras, R.; Van Huylenbroeck, J. Woody Ornamentals of the Temperate Zone; Springer: Cham, Switzerland, 2018; pp. 803–887. [Google Scholar]
- Santagostini, P.; Demotes-Mainard, S.; Huché-Thélier, L.; Leduc, N.; Bertheloot, J.; Guérin, V.; Bourbeillon, J.; Sakr, S.; Boumaza, R. Assessment of the Visual Quality of Ornamental Plants: Comparison of Three Methodologies in the Case of the Rosebush. Sci. Hortic. (Amst.) 2014, 168, 17–26. [Google Scholar] [CrossRef]
- Reynolds, D.; Baret, F.; Welcker, C.; Bostrom, A.; Ball, J.; Cellini, F.; Lorence, A.; Chawade, A.; Khafif, M.; Noshita, K.; et al. What Is Cost-Efficient Phenotyping? Optimizing Costs for Different Scenarios. Plant Sci. 2019, 282, 14–22. [Google Scholar] [CrossRef]
- Denaeghel, H.; Van Laere, K.; Leus, L.; Van Huylenbroeck, J.; Van Labeke, M.C. Interspecific Hybridization in Sarcococca Supported by Analysis of Ploidy Level, Genome Size and Genetic Relationships. Euphytica 2017, 213, 149. [Google Scholar] [CrossRef]
- Leus, L.; Van Laere, K.; De Riek, J.; Van Huylenbroeck, J. Ornamental Crops; Handbook of Plant Breeding; Van Huylenbroeck, J., Ed.; Springer: Cham, Switzerland, 2018; Volume 11, pp. 719–767. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color Indices for Weed Identification under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Borra-Serrano, I.; Leus, L.; Wang, S.; Van Huylenbroeck, J.; Lootens, P.; Van Laere, K. A View from above: The Use of Drones and Image-Based Phenotyping in Breeding and Production of Woody Ornamentals. Acta Hortic. 2021, 1331, 1–9. [Google Scholar] [CrossRef]
- Fasoula, D.A.; Ioannides, I.M.; Omirou, M. Phenotyping and Plant Breeding: Overcoming the Barriers. Front. Plant Sci. 2020, 10, 1713. [Google Scholar] [CrossRef] [PubMed]
- Mesas-Carrascosa, F.J.; Torres-Sánchez, J.; Clavero-Rumbao, I.; García-Ferrer, A.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. Assessing Optimal Flight Parameters for Generating Accurate Multispectral Orthomosaicks by Uav to Support Site-Specific Crop Management. Remote Sens. 2015, 7, 12793–12814. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Borra-Serrano, I.; Manuel Peña, J. Assessing UAV-Collected Image Overlap Influence on Computation Time and Digital Surface Model Accuracy in Olive Orchards. Precis. Agric. 2018, 19, 115–133. [Google Scholar] [CrossRef]
- Jang, G.J.; Kim, J.; Yu, J.K.; Kim, H.J.; Kim, Y.; Kim, D.W.; Kim, K.H.; Lee, C.W.; Chung, Y.S. Review: Cost-Effective Unmanned Aerial Vehicle (UAV) Platform for Field Plant Breeding Application. Remote Sens. 2020, 12, 998. [Google Scholar] [CrossRef]
- Guo, W.; Carroll, M.E.; Singh, A.; Swetnam, T.L.; Merchant, N.; Sarkar, S.; Singh, A.K.; Ganapathysubramanian, B. UAS-Based Plant Phenotyping for Research and Breeding Applications. Plant Phenomics 2021, 2021, 9840192. [Google Scholar] [CrossRef]
- Turgut, K.; Dutagaci, H.; Galopin, G.; Rousseau, D. Segmentation of Structural Parts of Rosebush Plants with 3D Point-Based Deep Learning Methods. Plant Methods 2022, 18, 20. [Google Scholar] [CrossRef]
- De Castro, A.I.; Maja, J.M.; Owen, J.; Robbins, J.; Peña, J.M. Experimental Approach to Detect Water Stress in Ornamental Plants Using SUAS-Imagery. Auton. Air Ground Sens. Syst. Agric. Optim. Phenotyping III 2018, 10664, 178–188. [Google Scholar] [CrossRef]
- Oerke, E.-C. Remote Sensing of Diseases. Annu. Rev. Phytopathol. 2020, 58, 225–252. [Google Scholar] [CrossRef]
- Neupane, K.; Baysal-Gurel, F. Automatic Identification and Monitoring of Plant Diseases Using Unmanned Aerial Vehicles: A Review. Remote Sens. 2021, 13, 3841. [Google Scholar] [CrossRef]
- Chandel, A.K.; Khot, L.R.; Sallato, B. Apple Powdery Mildew Infestation Detection and Mapping Using High-Resolution Visible and Multispectral Aerial Imaging Technique. Sci. Hortic. (Amst.) 2021, 287, 110228. [Google Scholar] [CrossRef]
- Marin, D.B.; Ferraz, G.A.e.S.; Santana, L.S.; Barbosa, B.D.S.; Barata, R.A.P.; Osco, L.P.; Ramos, A.P.M.; Guimarães, P.H.S. Detecting Coffee Leaf Rust with UAV-Based Vegetation Indices and Decision Tree Machine Learning Models. Comput. Electron. Agric. 2021, 190, 106476. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).