1. Introduction
Nowadays, the increasingly serious environmental pollution and energy problems urgently require internal-combustion-engine-based vehicles to be upgraded or replaced; so, new energy vehicles based on hybrid power and fuel cells have gradually stepped onto the stage and continue to be innovated. The shipping industry is one of the main sources of global greenhouse gas emissions. The development of clean energy ships powered by fuel cells has attracted wide attention. Fuel cells have the advantages of being clean, pollution-free, and low-noise, but they have some disadvantages, such as an insufficient dynamic response performance and fast performance decay. Limited by the characteristics of a single energy source, a variety of energy sources and bidirectional DC converters are usually mixed to form a hybrid ship to improve the flexibility, stability, and economy of the ship and enhance its adaptability to complex sea conditions through the reconfiguration of power system energy.
Compared with traditional ships, hybrid ships have great development potential and broad application prospects. First of all, hybrid ships use clean energy and renewable energy, which significantly reduces the emission of harmful gases, helps to mitigate global climate change and improve air quality, and has important environmental significance; secondly, the use of natural resources for energy replenishment instead of traditional fossil fuels not only reduces the cost, but also has strong adaptability and can obtain better navigation results in complex waters and marine conditions; finally, hybrid ships have great potential, as, through their technological innovation and intelligent control, they can improve the efficiency of their energy utilization, reduce their energy consumption, and achieve the win–win situation of sustainable development and economic benefits.
A hybrid energy storage system (HESS) has the functions of shaving peaks and filling valleys, compensating for sudden changes in operating conditions, and improving power quality. According to the principle of converting energy into electric energy, it can be divided into mechanical, electrochemical, and electromagnetic energy storage, comprehensively considering the factors of cycle life, energy density, reliability, configuration cost, etc., to maintain the busbar voltage in the safety margin [
1] and, at the same time, to meet the demand of continuous power supply for the ship. The energy-type and power-type energy storages are mixed to form the HESS. In recent years, domestic and international experts have focused on the research of composite energy storage technology composed of lithium batteries/supercapacitors.
The load demand of hybrid ships cannot be satisfied by the accumulation of power sources alone, and reasonable energy management strategies need to be designed to meet the complex working conditions while taking into account the service life of the equipment [
2,
3]. In the past, according to the degree of hybridization, they were divided into switching control strategies and power-following strategies [
4]. Current energy management strategies are mainly based on rules, optimization, and artificial intelligence algorithms.
Rule-based energy management strategies are classified into deterministic and fuzzy rules. Han et al. [
5] proposed a strategy to continuously adjust the battery SOC for power allocation based on typical working conditions, which reduces the hydrogen consumption of the fuel cell and maximizes the efficiency of the system compared with the traditional load-tracking control; Zou et al. [
6] designed a charging-and-discharging control strategy for the SOC of the energy storage element to avoid overcharging and over-discharging of the energy storage system. However, the working condition setting is relatively specific and the universality of the control strategy cannot be verified. Sun [
7] proposed a strategy based on fuzzy control and dynamic coordination, which improved the gas engine efficiency and reduced the system response time for the gas–electric hybrid power system of an inland waterway tugboat. The setting of both deterministic and fuzzy rules needs to be based on expert experience, which makes it difficult to achieve global optimization and has many limitations.
Optimized control strategies are divided into real-time optimization (RTO) and global optimization (GO) for the optimization problem, to formulate the function of optimization objectives and constraints and to optimize the power allocation of multiple energy sources to operate at the best operating point. The real-time optimization strategy is based on the real-time state parameters of the ship to carry out online control, so that the performance indexes reach the real-time optimum. Usually, there is an equivalent consumption minimization strategy (ECMS), model predictive control (MPC), and robust control (RC), which can be used to optimize the performance of the ship. Hu Dongliang [
8] used equivalent energy minimization consumption as the objective function, the sailing direction and time as the constraints, and the whale optimization algorithm for dynamic optimization, and the simulation results showed a reduction in the ship’s energy consumption. The global optimization strategy needs to be chosen based on the ship’s static historical data and known sailing conditions, and the common ones are dynamic programming (DP), genetic algorithm (GA), and particle swarm optimization (PSO), as well as these algorithm’s variants. Zhang [
9] decoupled the optimization problem to obtain the corresponding solution, then used the non-dominated sorting-based genetic algorithm II (NSGA-II) to find the Pareto frontier, and finally used fuzzy decision-making to obtain the optimal solution. Due to the limitations of a single intelligent optimization algorithm when searching time and space, in recent years, multiple algorithms have often been improved or fused to achieve the optimal solution, but the amount of computation and the time consumption have also increased accordingly.
Energy management strategies based on artificial intelligence algorithms mainly utilize machine learning, deep learning, and deep reinforcement learning algorithms to control each power source. Wu [
10] applied deep Q-learning (DQL) algorithms to the energy management problem of a parallel electric vehicle, and the results showed that it was better than the Q-learning method in terms of training time and convergence rate. However, since this strategy is still in its infancy, the theory still needs to be verified by a large number of simulation experiments. There are advantages and disadvantages of each method, and different methods can be synergized to achieve better control results.
The first section of this paper provides a brief overview of the background and significance of the research on new energy ships, the development of energy storage technology, and the current status of energy management strategies, and the remaining sections are structured as follows: the second section designs the topology of the composite energy storage system and models the important components; the third section introduces the transient optimization strategy and designs the energy management strategy in this paper, i.e., the fuzzy control-based equivalent minimum hydrogen consumption strategy, which is characterized by its use of fuzzy logic control to adaptively adjust the penalty factor of the hydrogen consumption model to realize the power allocation of the composite energy storage system; the fourth section introduces the typical working conditions and optimization model of this paper and designs the corresponding simulation experiments; and the fifth section validates the proposed method through the simulation model, and the results of the simulation experiments are compared and analyzed and discussed. By comparing the SOC of Li-ion batteries, the output power of fuel cells and Li-ion batteries, the bus voltage stability, and the equivalent hydrogen consumption, the effectiveness of the proposed strategy is verified to solve the problems of poor dynamic characteristics of fuel cells and the inability of Li-ion batteries to bear high-frequency load fluctuations, so as to improve the quality of the power.
3. Mathematical Modeling of Optimization Problems
3.1. Fundamental Principle
In contrast to the global optimization strategy, which requires prediction of all working conditions of a ship’s sailing cycle and is constrained by variations among different ship types and uncertainties in real-time operations, the real-time optimization strategy focuses on determining the optimal operating point for each power source. It assesses and adjusts the current optimal operating mode based on real-time operational information. This approach considers the dynamic nature of the ship’s operations and allows for immediate adjustments to ensure efficient power utilization under changing conditions. By continuously evaluating and regulating the system based on real-time data, the real-time optimization strategy can enhance overall energy efficiency and performance, making it a valuable tool for optimizing energy management in marine applications.
The ECMS is a control strategy that determines a penalty factor by considering the SOC of the battery and the operating state of the diesel engine. It then converts the output power of the energy storage element into equivalent fuel consumption. The goal of the ECMS is to minimize the sum of the equivalent fuel consumption of the energy storage element and the actual fuel consumption of the diesel engine. Building upon this concept, the equivalent minimum hydrogen consumption strategy is derived. This strategy aims to minimize the sum of the hydrogen consumption of the energy storage element and the fuel cell. By optimizing the energy flow between different power sources based on these consumption metrics, the ECMS and its derivative strategies help improve the overall system efficiency and reduce operational costs in hybrid energy systems.
3.2. Strategic Design
The equivalent minimum hydrogen consumption strategy operates on the principle that the energy stored in the fuel cell for power generation will eventually be consumed, leading to a reduction in hydrogen consumption. This strategy establishes an equivalent relationship between the electrical energy consumption of the battery and supercapacitor and the hydrogen consumption of the fuel cell. By converting all energy consumption into hydrogen consumption, it calculates the equivalent hydrogen consumption at each moment. The optimization target of this strategy is to minimize the equivalent hydrogen consumption in each control cycle by adjusting the energy allocation of the power system in real time.
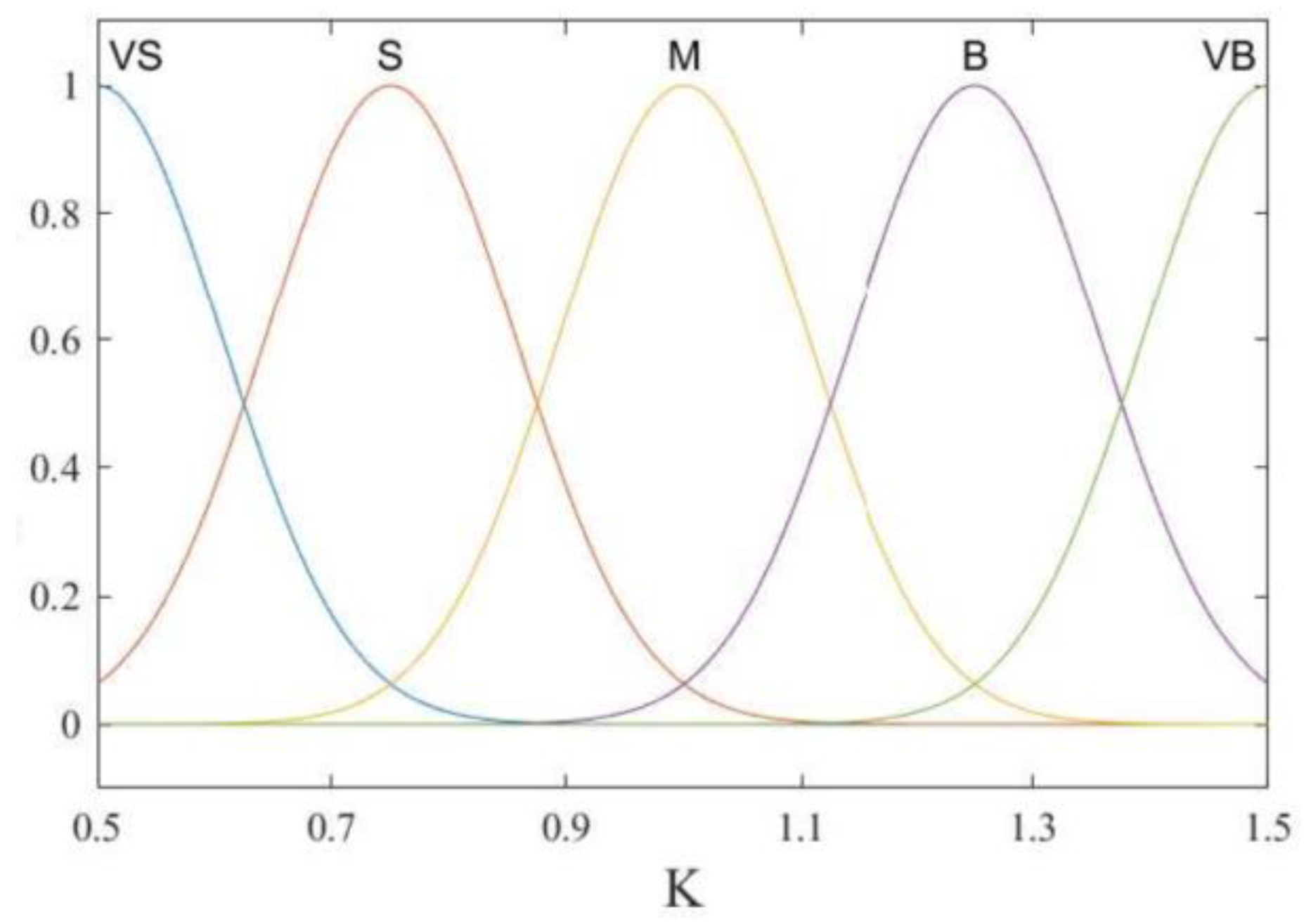
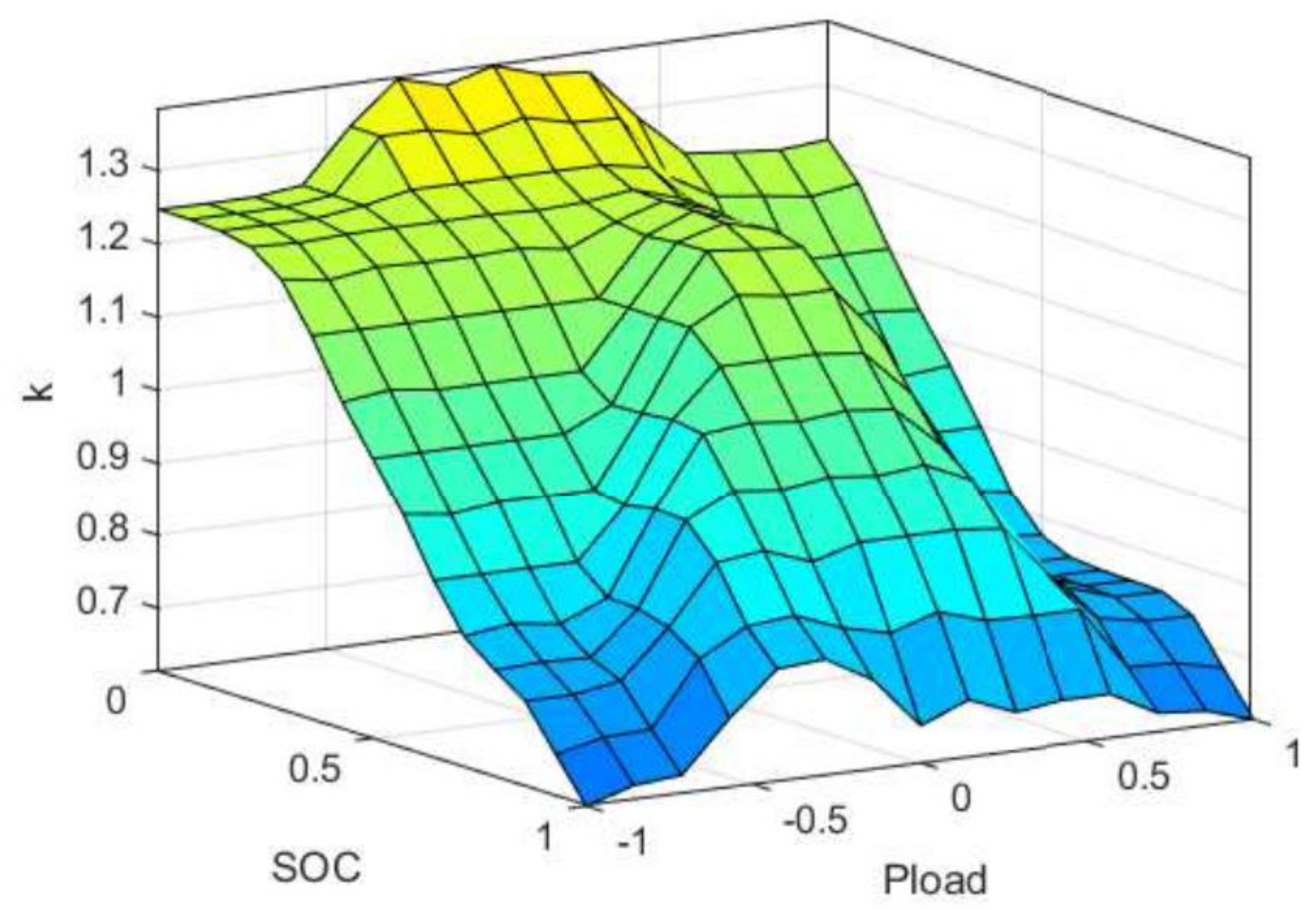
In this strategy, the control focuses on achieving the minimum equivalent hydrogen consumption under all operating conditions. When the battery state of charge (SOC) is high, the cost of battery power supply is low, leading the control strategy to prioritize battery power to meet the power demand. Consequently, the penalty factor decreases with an increase in battery SOC. Conversely, when the battery SOC is low, the cost of battery power supply is high, prompting the control strategy to favor the fuel cell for power supply. By dynamically adjusting the energy allocation based on real-time conditions and the equivalent hydrogen consumption target, this strategy aims to optimize system performance and efficiency in hybrid energy systems.
The calculation of equivalent hydrogen consumption can be performed according to Equation (12):
where
is the hydrogen consumption of the fuel cell,
and
are the equivalent hydrogen consumption of the Li-ion battery and super-capacitor, respectively, and
and
are the penalty factors of the two. The SOC of the energy storage device can be controlled by adjusting the size of the penalty factor in real time, because the purpose of the supercapacitor is to cope with the peak of the demanded power under high-frequency working conditions to protect the service life of the fuel cell and the Li-ion battery, and its contribution compared to that of the other two is minimal and negligible; therefore, this paper chooses to use the PI controller to detect the supercapacitor SOC change, which is adjusted and added to the equivalent power consumption of the lithium battery. Therefore, Equation (12) can be modified to Equation (13):
The hydrogen consumption of the fuel cell is given by Equation (14) as follows:
where
is the volumetric flow rate of hydrogen, g/s;
is the pressure at the anode, which is designed to be 1.16 atmospheric pressure in this paper;
is the molar mass of hydrogen, g/mol;
is the molar gas constant; and
is the reaction temperature, which is designed to be 318 K in this paper.
The equivalent hydrogen consumption of a lithium battery is given by Equation (15) below:
where
is the real-time power of the Li-ion battery;
is the average value of hydrogen consumption of the fuel cell;
is the average power of the fuel cell;
and
represent the charging and discharging efficiency, respectively;
and
are the average efficiencies of charging and discharging, which are designed to be 0.8 in this paper; and
≥ 0 indicates that the Li-ion battery is being discharged.
< 0 indicates that the Li-ion battery is charging. The charging and discharging efficiency is obtained from Equation (16) [
23]:
where
and
are the internal resistance of the battery during charging and discharging, respectively, which is designed as a constant value of
in this paper. In this paper, the selected lithium batteries are IFR 32650-5000 series, whose internal resistance is about 10 mΩ. According to the typical working condition load data, the average power to be borne by the composite energy storage system is allocated to the lithium-ion batteries, and it is calculated that it needs to be connected in series with 100 sections and 13 groups of lithium batteries of the selected model, and the customized R is taken as 0.077 Ω.
For the evaluation of lithium battery loss, it is derived from Equation (17) as follows:
where
represents the magnitude of the charging and discharging power of the battery at the moment
; T is the complete time of a typical round of working conditions; and
is the rated capacity of the battery pack.
3.3. Optimization Model
When solving the optimization problem, constraints need to be set on the optimization variables according to the actual situation, and the constraints set in this paper are as follows:
Lithium batteries and supercapacitors should not be overcharged and over-discharged, otherwise the internal aging of the components will accelerate, which will seriously affect the service life. So, it is necessary to set a reasonable range, as shown in Equation (18).
The total energy output of the composite energy storage system needs to satisfy the load demand as shown in Equation (19).
The voltage of the supercapacitor determines the size of its energy storage and needs to satisfy the voltage constraints, as shown in Equation (20).
The instantaneous power of the power system needs to meet the power demand of the ship to ensure that there is no energy gap, otherwise it will lead to damage to the equipment, and in serious cases, the whole ship will be out of power. The balance constraints are shown in Equation (21).
The overall process of optimization is shown in
Figure 3 below.
The mathematical model for the optimal solution is shown in Equation (22) below:
where
and
are the weight coefficients, both of which are taken as 0.5 in this paper.
3.4. Dual Closed-Loop PI Control Strategy
The implementation of a double closed-loop Proportional–Integral (PI) control strategy in this study aims to address the challenges associated with fluctuating fuel cell output power and prevent the overcharge and over-discharge of the lithium battery.
In this control strategy, the outer loop is responsible for adjusting the fuel cell’s output current based on the load power and the output of the equivalent minimum hydrogen consumption strategy of the Li-ion battery state of charge (SOC). This adjustment enables the system to prioritize charging or discharging the Li-ion battery at the appropriate times. On the other hand, the inner loop focuses on PI regulation of the bus voltage to enhance the stability of the fuel cell power output and ensure it aligns with the desired operating characteristics, including soft dynamic characteristics.
By incorporating this double closed-loop PI control strategy, this study aims to effectively manage the energy exchange in various working conditions. The control loop, which includes the PI controller, plays a crucial role in optimizing the system’s performance and efficiency. The control strategy depicted in
Figure 4 provides a visual representation of how the control loops interact to achieve the desired outcomes in terms of power management and system stability.
In the modified power system where the fuel cell, lithium battery, and supercapacitor are utilized as composite energy storage devices, the implementation of the equivalent minimum hydrogen consumption strategy plays a critical role in controlling the ship’s performance and enhancing its overall economy. However, the effectiveness of this strategy heavily relies on the appropriate setting of the penalty factor, which significantly influences the actual control outcomes.
To address this issue and optimize the control strategy, an SOC balancing strategy is established. This strategy focuses on balancing the SOC of the battery through SOC equalization control. By adjusting the penalty factor through the battery SOC balancing control coefficient, SOC balancing can be achieved effectively.
The principle behind the SOC balancing strategy is that the cost of using the battery decreases as the battery SOC increases. In such cases, the energy management strategy tends to distribute the ship’s load between the energy storage system and the fuel cell. Conversely, when the battery SOC is low, the cost of using the battery increases, prompting the strategy to prioritize the fuel cell for load distribution.
By dynamically adjusting the penalty factor based on the battery SOC, the SOC balancing strategy aims to optimize the energy management process, enhance system efficiency, and ensure the effective utilization of the composite energy storage devices in the power system. This approach helps to maintain the balance between energy storage elements and power sources, leading to improved performance and economic benefits for the ship’s power system.
5. Simulation Experiment Analysis
This study aims to enhance the efficiency of model validation and streamline the detection process of energy management strategies by simplifying the load demand under typical operational conditions. The simplified load power profile, as illustrated in
Figure 11, provides insights into the load characteristics during different phases of ship operation.
Analyzing the simplified load power profile reveals that the average demand load is 4.36 kW, with a peak power of 11.2 kW. The operational timeline can be segmented as follows:
From 0 to 90 s: The ship is engaged in constant-speed sailing, characterized by a relatively stable load demand.
From 90 to 200 s: The ship undergoes docking, berthing, and disembarking operations, resulting in significant load variations. This phase represents maneuvering sailing conditions.
From 200 to 360 s: The ship transitions back to constant-speed sailing, with load demand stabilizing once again.
By simplifying the load demand for different operational scenarios, this study aims to streamline the validation process and optimize energy management strategies for improved operational efficiency. This approach allows for a clearer understanding of load dynamics during various phases of ship operation, facilitating the development of more effective and optimized energy management strategies tailored to the specific operational requirements of the vessel.
Based on the DC/DC control principle introduced in the previous section, combined with the energy management strategy designed in this paper, the overall control flow of the hybrid ship power system is shown in
Figure 12.
The energy management strategy’s control process involves a series of steps to effectively manage the ship’s load demand and Li-ion battery charge state. Here is an overview of the control process:
Data Collection: The load demand of the ship and the Li-ion battery’s charge state are gathered as input parameters for the energy management strategy during each sampling interval.
Calculation of Reference Output Power Signals: Based on the collected data, the energy management strategy calculates the reference output power signals required for the fuel cell and the lithium battery. These signals are then fed into the DC/DC controller for further processing.
DC/DC Controller Operation: The SOC, voltage, and current signals of both the fuel cell and the lithium battery are collected and input into their respective DC/DC controllers. These controllers utilize the control method specified in the previous sections to perform calculations.
Control Signal Generation: The DC/DC controllers process the input data and generate the necessary control signals. These signals are responsible for regulating the operation of each power source, ensuring optimal performance and efficiency based on the energy management strategy’s directives.
By following this control process, the energy management strategy effectively coordinates the power distribution between the fuel cell and the lithium battery, ensuring that the ship’s energy needs are met efficiently and effectively. This systematic approach allows for dynamic adjustment of power allocation based on real-time data, contributing to enhanced performance and optimized energy utilization in the ship’s operations.
In order to verify the effectiveness of the control strategy proposed in this paper, the initial conditions of the simulation experiment set in this paper are shown in
Table 2 below.
This study evaluates the performance of a composite energy storage system, comprising a Li-ion battery and a supercapacitor, under moderate SOCs. The comparisons are primarily focused on key metrics such as equivalent hydrogen consumption, Li-ion battery power fluctuation, Li-ion battery SOC variations, and bus voltage stability. These comparisons aim to demonstrate the effectiveness of integrating the composite energy storage system with the previously designed control strategy, in contrast to the original ship configuration that solely relied on a single battery for energy storage.
The simulation results are depicted in
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17. By analyzing these figures, researchers can assess the impact of the composite energy storage system and the associated control strategy on key performance indicators. The comparison between the composite energy storage system and the single battery configuration highlights potential improvements in energy efficiency, power stability, and overall system performance achieved through the integration of multiple energy storage technologies and advanced control algorithms. Overall, the simulation results serve as a visual representation of the benefits and effectiveness of utilizing a composite energy storage system with a tailored control strategy in enhancing the energy management and operational capabilities of a ship, paving the way for more efficient and sustainable maritime transportation practices.
As shown in
Figure 13, this study demonstrates that integrating a composite energy storage system, along with an equivalent minimum hydrogen consumption energy management strategy, leads to notable improvements in power stability and efficiency compared to the original ship configuration. The real-time simulated power curve of the fuel cell shows a significant reduction in power fluctuation when utilizing the composite energy storage system. Specifically, the maximum power fluctuation is reduced by approximately 52.8% and 41.9% during maneuvering sailing conditions (90–170 s). Additionally, both the average output power and maximum power fluctuations are significantly decreased during offshore operating conditions (170–200 s).
The use of the composite energy storage system effectively minimizes power fluctuations in the fuel cell, the primary power source, leading to enhanced operational efficiency and extended service life. Moreover, this study indicates that employing the equivalent factor of fuzzy logic control results in an approximate 11.8% increase in the average power of the fuel cell compared to the equivalent factor strategy of the S-type penalty function. While the maximum output power remains the same under maneuvering conditions, the power fluctuation is lower with the fuzzy logic control approach.
The analysis presented in
Figure 14 illustrates the real-time power simulation curve of the lithium-ion battery when utilizing the penalty factor control strategy with the composite energy storage system and fuzzy logic control. A comparison is made with the battery charging and discharging power of the mother ship equipped with a single battery storage system, as well as the real-time power simulation curve of the lithium-ion battery using the equivalent minimum hydrogen consumption strategy under the S-type penalty function.
The results show a significant reduction in the power fluctuation of the lithium-ion battery when integrated into the composite energy storage system, particularly during the maneuvering stage (90–135 s). The peak power fluctuation is notably decreased by 62.07% and 66.38%, respectively, attributed to the supercapacitor handling the high-frequency fluctuation portion of the load power and optimizing the charging and discharging processes of the lithium-ion battery. This reduction in power fluctuation indicates the effectiveness of replacing the original single battery storage with the composite energy storage system in enhancing power stability and prolonging the battery’s lifespan.
During cruising conditions (0–90 s and 200–360 s), the average output power of the lithium-ion battery is reduced by 26.52% and 27.56%, respectively, with the fuzzy logic-controlled equivalent factor compared to the S-type penalization function. This more gradual reduction in power output demonstrates that the proposed penalty factor calculation method can more effectively control the output power levels of each power source, leading to more balanced energy coupling among multiple power sources.
Figure 15 depicts the simulation curve of the lithium-ion battery SOC for the two equivalent minimum hydrogen consumption strategies. The figure shows that under the fuzzy logic control, the change in the SOC of the lithium-ion battery is more gradual, aligning with the previous comparison of charging and discharging power changes. This smoother SOC transition indicates the effectiveness of fuzzy logic control in optimizing the battery’s performance and ensuring stable energy management.
In
Figure 16, the simulation comparison curve of the bus voltage is presented. The supercapacitor in this study is directly connected to the DC bus, making the DC bus voltage equivalent to the voltage of the supercapacitor, which is influenced by the SOC of the supercapacitor. The SOC of the supercapacitor directly impacts the DC bus voltage, highlighting the critical role of the supercapacitor in maintaining bus voltage stability.
The previous comparison of the fuel cell output power indicates that the design of the equivalent factor based on fuzzy logic control is more rational. The average power output of the fuel cell is higher under fuzzy logic control compared to the S-type penalty function. Furthermore, the composite energy storage system is required to handle a lower average power, and the SOC of the supercapacitor changes more smoothly under the same capacity. This smooth SOC transition ensures the stability of the bus voltage and guarantees the quality of the power supply, emphasizing the importance of advanced control strategies in optimizing energy management and system performance.
The comparison of equivalent hydrogen consumption is presented in
Figure 17. Under the same conditions and utilizing the equivalent hydrogen consumption calculation model proposed earlier, the equivalent hydrogen fuel consumption under the S-type penalty function and the fuzzy control penalty factor is measured at 25.25 g and 22.21 g, respectively. This represents a reduction of 12.04% in the overall ship sailing process. The improved equivalent minimum hydrogen consumption strategy not only ensures the stability of the hybrid power system but also minimizes the hydrogen consumption of the energy storage system, enhancing the system’s robustness. This approach effectively leverages the characteristics of the hybrid power system, improving the economy of hydrogen fuel utilization. In comparison, the improved equivalent minimum hydrogen consumption strategy ensures the stability of the hybrid power system while minimizing the hydrogen consumption of the energy storage system and improves the robustness of the system, which effectively utilizes the characteristics of the hybrid power system and improves the economy of hydrogen fuel.
6. Conclusions
The proposed fuzzy logic control-based equivalent minimum hydrogen consumption strategy for the hybrid marine fuel cell power system aims to effectively manage the multi-power coupling system, coordinate motor propulsion, and ensure navigation safety. This strategy optimizes energy distribution and exhibits robustness to changes in load power under typical working conditions of the ship. Through modeling simulation and comparative analysis, the composite energy storage system and the improved equivalent minimum hydrogen consumption strategy demonstrate the ability to reduce output power fluctuations in fuel cells and lithium-ion batteries, compensate for the fuel cell’s soft dynamic characteristics, and address the limitations of a single battery storage system in handling high-frequency power fluctuations. Compared to the widely used penalty function, this strategy results in smoother SOC changes in the composite energy storage system and DC bus voltage, effectively improving power quality. Furthermore, the implementation of this strategy leads to a 12.04% reduction in equivalent hydrogen consumption, enhancing the hydrogen fuel economy of the system. Overall, the efficient operation of the hybrid marine fuel cell system is achieved through the utilization of the hybrid power system’s characteristics and the optimization of energy management.
The simulation experiments conducted in this paper focused on comparing various characteristics under the typical working conditions and normal SOC conditions of the mother ship. However, actual ship sailing conditions are more complex, and the SOC of the energy storage system may vary, being either low or high. Therefore, future research should aim to establish standardized working condition test protocols and incorporate more complex initial conditions to validate and analyze the energy management strategy under different ship operating conditions.
By unifying relevant working condition test standards and introducing a wider range of initial conditions in simulations, researchers can better assess the performance and robustness of the energy management strategy in real-world scenarios. This approach will provide a more comprehensive understanding of how the strategy adapts to varying SOC levels and dynamic operating conditions, ultimately enhancing the applicability and effectiveness of the proposed energy management approach in practical maritime settings.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}