
Remaining Available Energy Prediction for Energy Storage Batteries Based on Interpretable Generalized Additive Neural Network

 ,
,
Abstract

1. Introduction
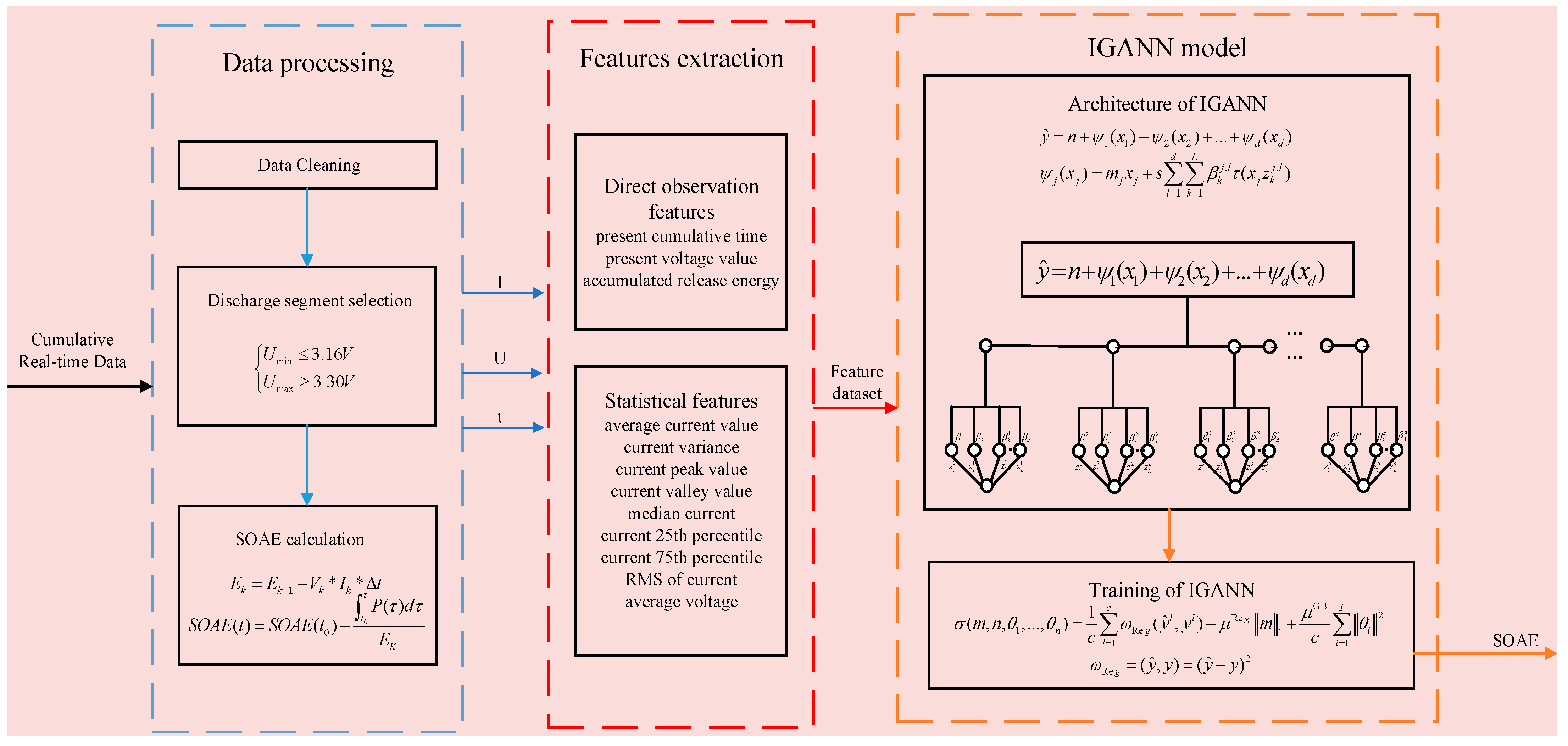
- Based on the operating conditions in real battery operation, a battery working voltage threshold considering safety margins is designed, along with the proposed state of available energy (SOAE) metric. This approach helps prevent excessive discharge caused by high current pulses, while also addressing the adaptability issue of energy state evaluation under different operating conditions.
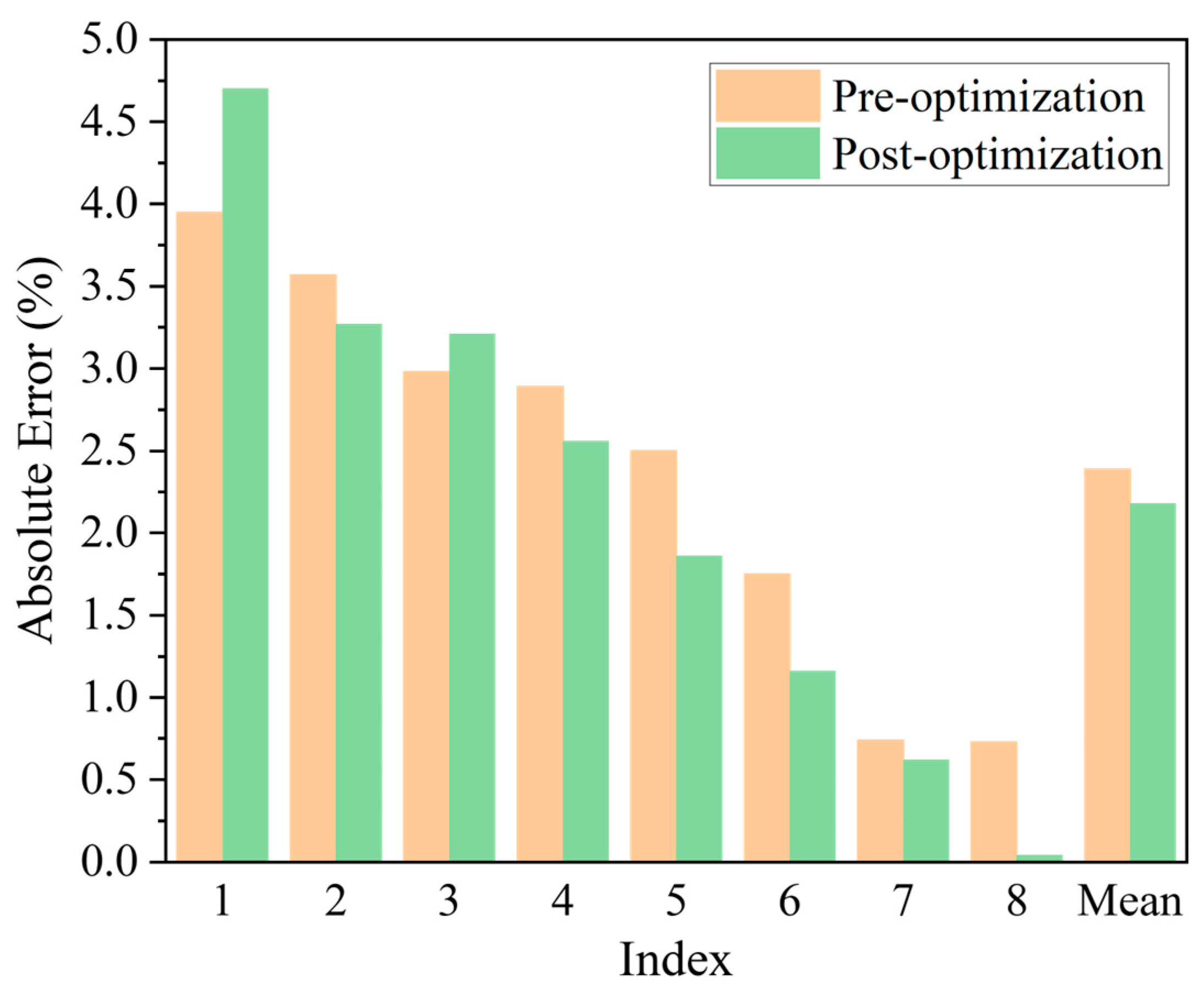
- The IGANN model combines a neural network and generalized additive model, enabling accurate mapping of the relationship between the features and target while also providing the interpretability through feature contribution visualization, which optimizes the model. In this study, the tailored IGANN model is applied to SOAE prediction, yielding promising results. The average absolute error at a single test point is 2.39%. After optimizing the model based on interpretability, the average absolute error improves to 2.18%, and the runtime is reduced by 70.55%. In dynamic prediction validation, the average absolute error is less than 3%, demonstrating the model’s robust performance in SOAE prediction tasks.
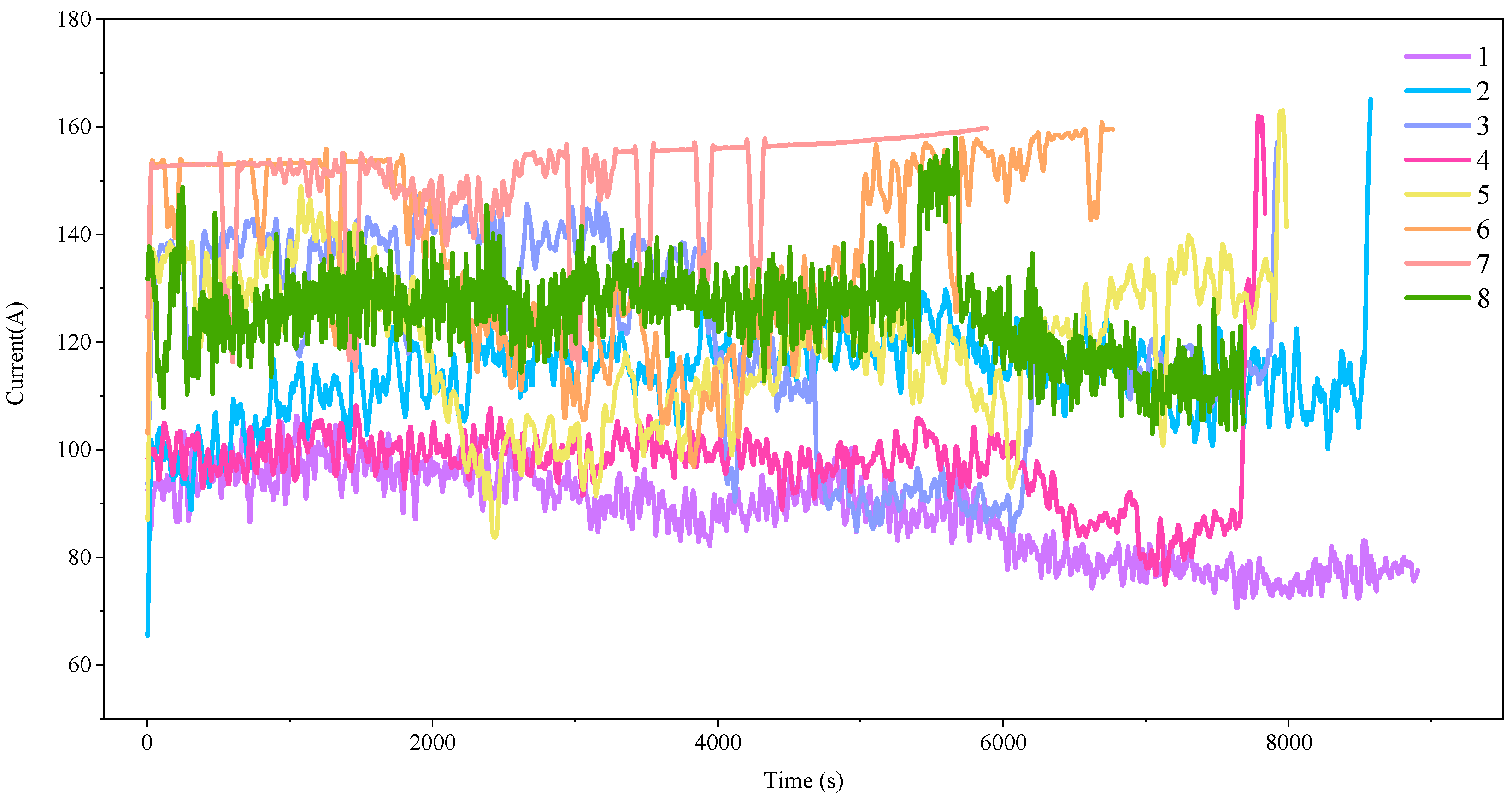
- The model is trained and validated using real operational data from an energy storage station. Laboratory data, which are results under fixed designed conditions, often lead to underfitting in the trained model, causing a decline in prediction accuracy under complex real-world conditions. This makes the model less adaptable to the dynamic operational conditions required for SOAE prediction. In contrast, the dataset used in this study more comprehensively covers actual dynamic operating conditions and validates the model’s prediction accuracy under real-world data, thereby enhancing the model’s engineering applicability.
2. Data Preprocessing
2.1. Data Overview
2.2. Data Cleaning
3. Dataset Construction
3.1. Definition of State of Available Energy
- Filter the discharge segments that fall within the valid voltage range according to Equation (3).
- 2.
- Remove data outside the valid voltage range for each discharge segment, set the cumulative energy to 0 at the start of discharge, and then calculate the cumulative energy at each sampling point for each discharge segment according to Equation (4),
- 3.
- Use Equation (2) to calculate the SOAE for each discharge sampling point.
3.2. Feature Extraction
4. Model Construction
4.1. IGANN Architecture and Principle
4.2. Model Details
5. Result and Discussion
5.1. IGANN Model Training
5.2. The Validation of the IGANN Based Model
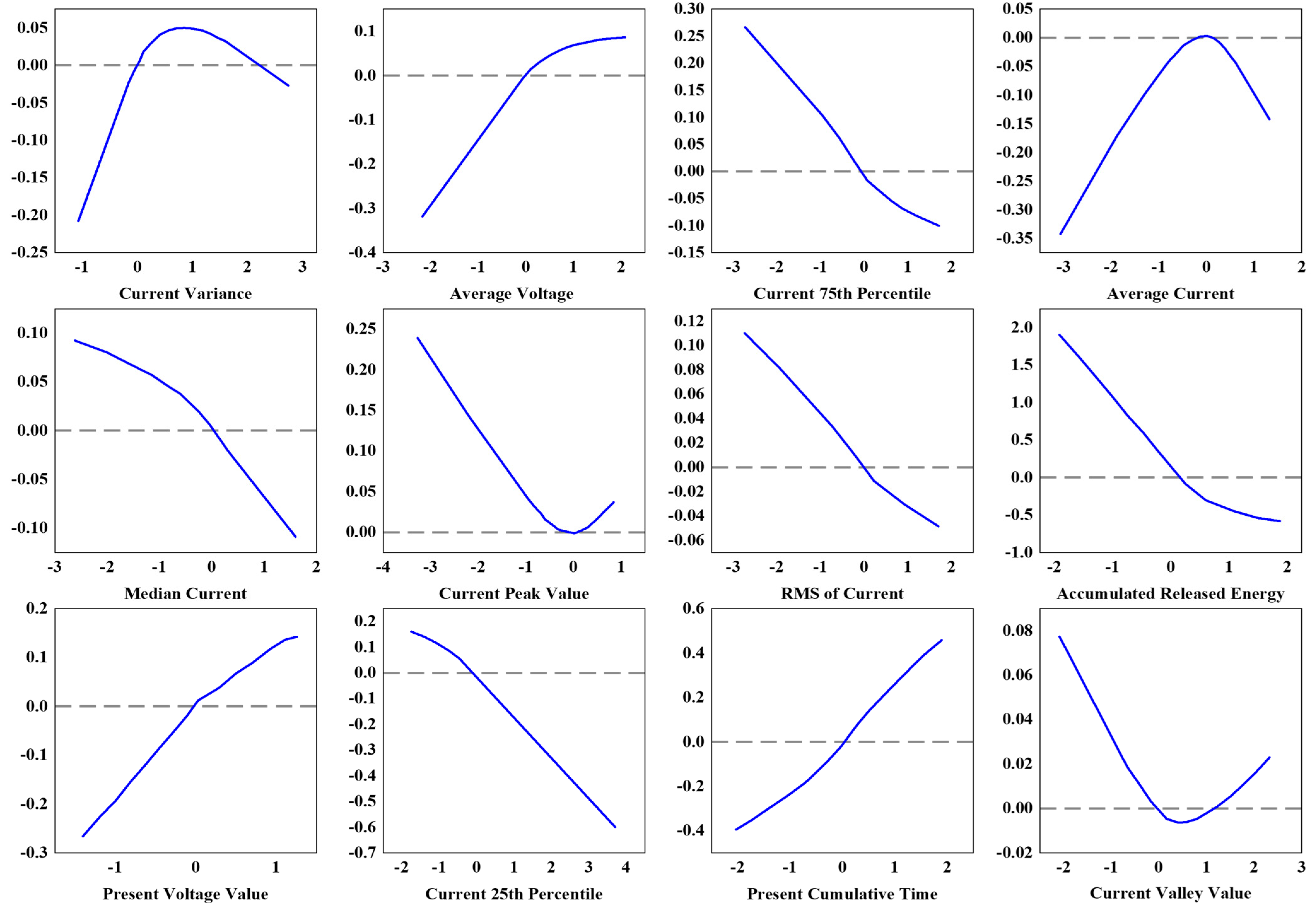
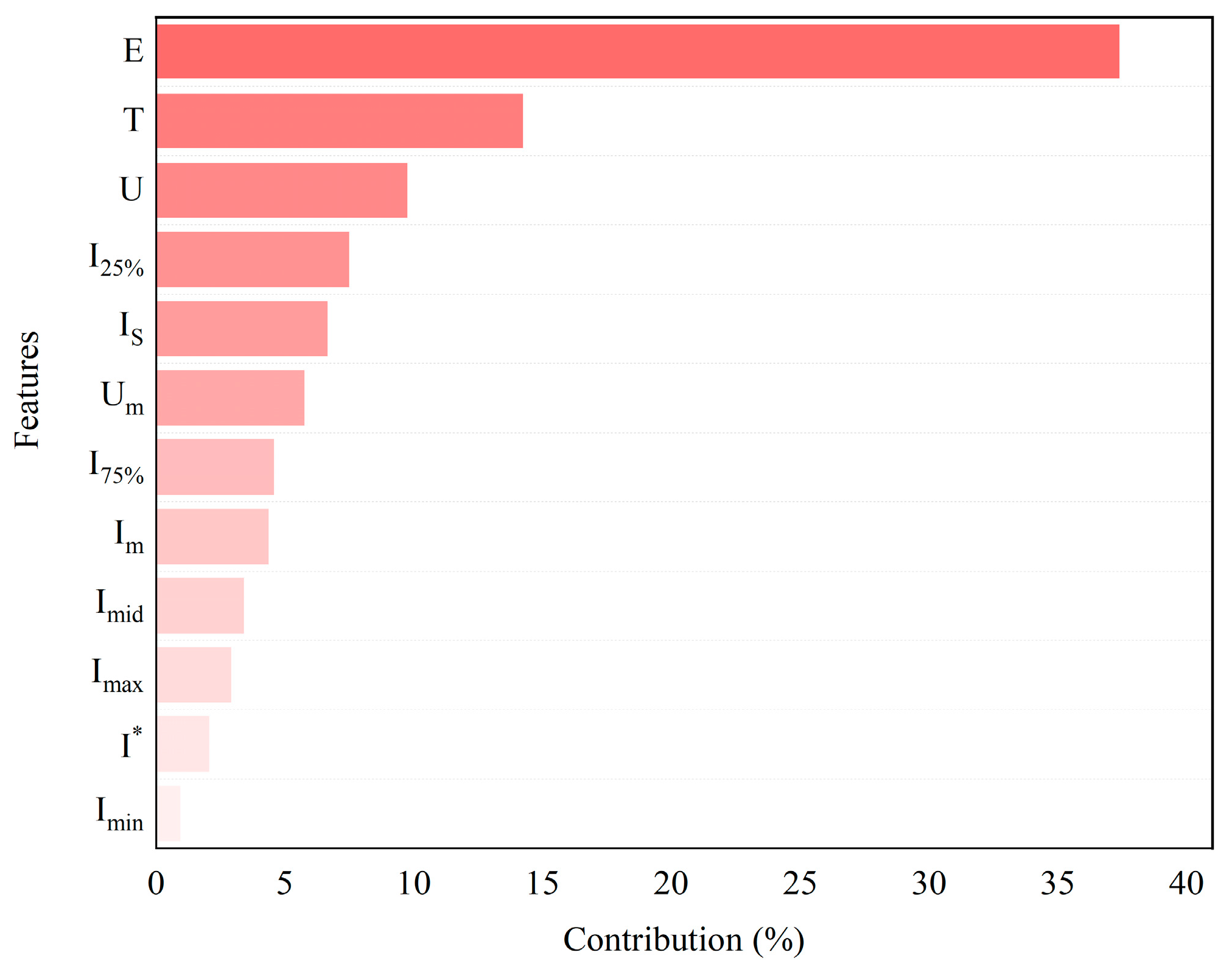
5.3. Model Interpretability
- For high-contribution features, accumulated released energy directly represents the battery’s real-time energy and serves as a concentrated indicator of the battery’s operating conditions during the discharge process, reflecting the synergistic effect of voltage and current. Thus, it has the largest contribution to the prediction of the battery’s state of available energy. Present voltage reflects the battery’s present discharge phase, which in turn reveals the remaining available energy, making it the second most influential feature for prediction.
- For medium-contribution features, the current 25th percentile and current 75th percentile both represent the current trends within a discharge phase. Present cumulative time directly reflects the battery’s operating stage, while current variance quantifies fluctuations in operating conditions. Due to the varying rates of voltage decrease under different conditions, the average voltage reflects the battery’s operating state. These features collectively contribute significantly to the prediction of the battery’s state of available energy.
- For low-contribution features, the current valley value and current peak value represent the minimum and maximum load states, respectively. However, during actual battery operation, the current exhibits ripples and pulses. The rms of the current reflects the effective value of the current, while the average current value reflects the overall discharge intensity, but both are heavily influenced by ripples. The median current lacks sensitivity to abnormal conditions, so these features have a smaller contribution to energy prediction.
5.4. Dynamic Prediction
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Carrasco Ortega, P.; Durán Gómez, P.; Mérida Sánchez, J.C.; Echevarría Camarero, F.; Pardiñas, Á.Á. Battery Energy Storage Systems for the New Electricity Market Landscape: Modeling, State Diagnostics, Management, and Viability—A Review. Energies 2023, 16, 6334. [Google Scholar] [CrossRef]
- Chavhan, S.; Mohale, V.; Kumbhar, M. A Review of Recent Advancements and Challenges in Battery Energy Storage System (BESS). In Proceedings of the 2024 1st International Conference on Innovative Sustainable Technologies for Energy, Mechatronics, and Smart Systems (ISTEMS), Dehradun, India, 26–27 April 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, X.; Luo, D.; Wen, R. Remaining available energy prediction for lithium-ion batteries considering electrothermal effect and energy conversion efficiency. J. Energy Storage 2021, 40, 102728. [Google Scholar] [CrossRef]
- Lai, X.; Weng, J.; Yang, Y.; Qiu, C.; Huang, Y.; Yuan, M.; Yao, Y.; Zheng, Y. Remaining discharge energy estimation of lithium-ion batteries based on average working condition prediction and multi-parameter updating. J. Solid State Electrochem. 2024, 28, 229–242. [Google Scholar] [CrossRef]
- Ren, D.; Lu, L.; Shen, P.; Feng, X.; Han, X.; Ouyang, M. Battery remaining discharge energy estimation based on prediction of future operating conditions. J. Energy Storage 2019, 25, 100836. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. An adaptive remaining energy prediction approach for lithium-ion batteries in electric vehicles. J. Power Sources 2016, 305, 80–88. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. A method for joint estimation of state-of-charge and available energy of LiFePO4 batteries. Appl. Energy 2014, 135, 81–87. [Google Scholar] [CrossRef]
- Li, X.; Pan, K.; Fan, G.; Lu, R.; Zhu, C.; Rizzoni, G.; Canova, M. A physics-based fractional order model and state of energy estimation for lithium ion batteries. Part II: Parameter identification and state of energy estimation for LiFePO4 battery. J. Power Sources 2017, 367, 202–213. [Google Scholar] [CrossRef]
- Shen, X.; Wang, S.; Yu, C.; Li, Z.; Fernandez, C. An improved forgetting factor recursive least square and extended particle filtering algorithm for accurate lithium-ion battery state of energy estimation. Ionics 2024, 30, 6179–6195. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, L.; Wang, L.; Liao, C.; Zhang, Y. Joint State-of-Charge and State-of-Available-Power Estimation Based on the Online Parameter Identification of Lithium-Ion Battery Model. IEEE Trans. Ind. Electron. 2022, 69, 3677–3688. [Google Scholar] [CrossRef]
- Liu, X.; Wu, J.; Zhang, C.; Chen, Z. A method for state of energy estimation of lithium-ion batteries at dynamic currents and temperatures. J. Power Sources 2014, 270, 151–157. [Google Scholar] [CrossRef]
- Ma, L.; Hu, C.; Cheng, F. State of Charge and State of Energy Estimation for Lithium-Ion Batteries Based on a Long Short-Term Memory Neural Network. J. Energy Storage 2021, 37, 102440. [Google Scholar] [CrossRef]
- Deng, Z.; Yang, L.; Cai, Y.; Deng, H. Maximum Available Capacity and Energy Estimation Based on Support Vector Machine Regression for Lithium-ion Battery. Energy Procedia 2017, 107, 68–75. [Google Scholar] [CrossRef]
- Tu, H.; Borah, M.; Moura, S.; Wang, Y.; Fang, H. Remaining discharge energy prediction for lithium-ion batteries over broad current ranges: A machine learning approach. Appl. Energy 2024, 376, 124086. [Google Scholar] [CrossRef]
- Dong, G.; Zhang, X.; Zhang, C.; Chen, Z. A method for state of energy estimation of lithium-ion batteries based on neural network model. Energy 2015, 90, 879–888. [Google Scholar] [CrossRef]
- Jiang, N.; Pang, H. Study on Co-Estimation of SoC and SoH for Second-Use Lithium-Ion Power Batteries. Electronics 2022, 11, 1789. [Google Scholar] [CrossRef]
- Guo, J.; Guo, Q.; Liu, J.; Wang, H. The Polarization and Heat Generation Characteristics of Lithium-Ion Battery with Electric–Thermal Coupled Modeling. Batteries 2023, 9, 529. [Google Scholar] [CrossRef]
- Qiu, C.; He, G.; Shi, W.; Zou, M.; Liu, C. The polarization characteristics of lithium-ion batteries under cyclic charge and discharge. J. Solid State Electrochem. 2019, 23, 1887–1902. [Google Scholar] [CrossRef]
- Pang, H.; Yan, X.; Jiang, N.; Fan, G.; Du, J.; Lin, G. Towards co-estimation of lithium-ion battery state of charge and state of temperature using a thermal-coupled extended single-particle model. Energy 2025, 326, 136186. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, W.; Zhang, Y.; Zhang, C.; Zhang, C.; Zhang, J. Research on the remaining useful life prediction method for lithium-ion batteries by fusion of feature engineering and deep learning. Appl. Energy 2024, 358, 122325. [Google Scholar] [CrossRef]
- Barré, A.; Deguilhem, B.; Grolleau, S.; Gérard, M.; Suard, F.; Riu, D. A review on lithium-ion battery ageing mechanisms and estimations for automotive applications. J. Power Sources 2013, 241, 680–689. [Google Scholar] [CrossRef]
- Xiao, Y.; Lu, Z.; Huang, C.; Yang, F. Battery State of Health Estimation Based on Energy Features and ResNet-SVR Model. Qual. Reliab. Eng. 2025, 41, 1789–1803. [Google Scholar] [CrossRef]
- Tian, J.; Zhang, J.; Luo, H.; Huang, C.; Chow, M.; Jiang, Y.; Yin, S. A Feature Extraction and Analysis Method for Battery Health Monitoring. In Proceedings of the 2024 IEEE 33rd International Symposium on Industrial Electronics (ISIE), Ulsan, Republic of Korea, 18–21 June 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, R.; Chen, J.; Piao, C. Battery health features extraction and state of health estimation based on real-time online vehicle driving data. J. Power Sources 2025, 645, 236784. [Google Scholar] [CrossRef]
- Kraus, M.; Tschernutter, D.; Weinzierl, S.; Zschech, P. Interpretable generalized additive neural networks. Eur. J. Oper. Res. 2024, 317, 303–316. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery Parameters | Value | Condition |
|---|---|---|
| Width/mm | 174.7 ± 0.8 | |
| Thickness/mm | 71.57 ± 0.5 | 40%SOC, 300 ± 20 kgf |
| Hight/mm | 207.20 ± 0.5 | |
| Weight/g | 5560 | |
| Rated capacity/Ah | 314 | temperature 25 ± 2 °C, discharge rate 0.5 C |
| Charging cut-off voltage/V | 3.65 | 0 °C < temperature ≤ 60 °C |
| Discharging cut-off voltage/V | 2.5 | 0 °C < temperature ≤ 60 °C |
| Parameter | Resolution | Sampling Frequency |
|---|---|---|
| Time | 1 s | 5 s |
| Cluster current | 1 mA | 5 s |
| Cluster voltage | 1 mV | 5 s |
| Cell voltage | 1 mV | 5 s |
| Cell temperature | 1 °C | 5 s |
| Feature | Significance |
|---|---|
| T/s | Present cumulative time |
| Im/A | Average current |
| Is/A | Current variance |
| Imax/A | Current peak value |
| Imin/A | Current valley value |
| Imid/A | Median current |
| I25%/A | Current 25th percentile |
| I75%/A | Current 75th percentile |
| I*/A | RMS of current |
| U/V | Present voltage |
| Um/V | Average voltage |
| Ek/Wh | Present accumulated released energy |
| Parameter | Value |
|---|---|
| task | “regression” |
| n_estimations | 6000 |
| n_hid | 20 |
| boost_rate | 0.1 |
| init_reg | 1 |
| elm_alpha | 1 |
| early_stopping | 30 |
| Number of Training Iterations | Boost Rate | Train Loss |
|---|---|---|
| 0 | 0.1 | 0.02008 |
| 1 | 0.1 | 0.01784 |
| … | … | … |
| 35 | 0.1 | 0.01021 |
| … | … | … |
| 3854 | 0.1 | 0.00550 |
| … | … | … |
| 3884 | 0.1 | 0.00550 |
| Index | Real SOAE | Predicted SOAE | Absolute Error |
|---|---|---|---|
| 1 | 50.40% | 53.29% | 2.89% |
| 2 | 40.30% | 42.80% | 2.50% |
| 3 | 35.60% | 38.58% | 2.98% |
| 4 | 55.20% | 55.94% | 0.74% |
| 5 | 42.80% | 42.07% | 0.73% |
| 6 | 41.00% | 37.05% | 3.95% |
| 7 | 46.03% | 44.55% | 1.75% |
| 8 | 39.70% | 43.27% | 3.57% |
| Mean | 43.91% | 44.69% | 2.39% |
| Index | 3.24 V | 3.22 V | 3.2 V | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Real SOAE | Predicted SOAE | Absolute Error | Real SOAE | Predicted SOAE | Absolute Error | Real SOAE | Predicted SOAE | Absolute Error | |
| 1 | 72.70% | 74.85% | 2.15% | 50.40% | 53.61% | 3.21% | 32.50% | 33.81% | 1.31% |
| 2 | 75.90% | 74.91% | 0.99% | 40.30% | 43.57% | 3.27% | 22.60% | 22.17% | 0.43% |
| 3 | 83.40% | 80.27% | 3.14% | 35.60% | 38.16% | 2.56% | 15.30% | 16.87% | 1.57% |
| 4 | 67.80% | 71.65% | 3.85% | 55.20% | 55.17% | 0.04% | 26.90% | 22.32% | 4.58% |
| 5 | 70.70% | 71.43% | 0.73% | 42.80% | 43.42% | 0.62% | 13.50% | 12.00% | 1.50% |
| 6 | 66.70% | 68.21% | 1.51% | 41.00% | 39.14% | 1.86% | 16.80% | 15.99% | 0.81% |
| 7 | 67.30% | 69.60% | 2.30% | 46.30% | 45.14% | 1.16% | 17.40% | 14.32% | 3.08% |
| 8 | 56.20% | 63.87% | 7.67% | 39.70% | 44.40% | 4.70% | 25.20% | 25.23% | 0.03% |
| MAE | 70.09% | 71.85% | 2.79% | 43.91% | 45.33% | 2.18% | 21.28% | 20.34% | 1.66% |
| Model Type | 3.24 V MAE | 3.22 V MAE | 3.2 V MAE |
|---|---|---|---|
| IGANN | 2.79% | 2.18% | 1.66% |
| WNN | 4.54% | 2.94% | 1.87% |
| FNN | 2.99% | 2.68% | 4.6% |
| LSTM | 3.17% | 2.77% | 3.45% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, J.; Li, P.; Dong, Y.; Fu, Z.; Wang, Z.; Yi, Y.; Tian, J. Remaining Available Energy Prediction for Energy Storage Batteries Based on Interpretable Generalized Additive Neural Network. Batteries 2025, 11, 276. https://doi.org/10.3390/batteries11070276
Qi J, Li P, Dong Y, Fu Z, Wang Z, Yi Y, Tian J. Remaining Available Energy Prediction for Energy Storage Batteries Based on Interpretable Generalized Additive Neural Network. Batteries. 2025; 11(7):276. https://doi.org/10.3390/batteries11070276
Chicago/Turabian StyleQi, Ji, Pengrui Li, Yifan Dong, Zhicheng Fu, Zhanguo Wang, Yong Yi, and Jie Tian. 2025. "Remaining Available Energy Prediction for Energy Storage Batteries Based on Interpretable Generalized Additive Neural Network" Batteries 11, no. 7: 276. https://doi.org/10.3390/batteries11070276
APA StyleQi, J., Li, P., Dong, Y., Fu, Z., Wang, Z., Yi, Y., & Tian, J. (2025). Remaining Available Energy Prediction for Energy Storage Batteries Based on Interpretable Generalized Additive Neural Network. Batteries, 11(7), 276. https://doi.org/10.3390/batteries11070276