
A Biomimetic Flexible Sliding Suction Cup Suitable for Curved Surfaces


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Design of Biomimetic Flexible Suction Cup
2.1.1. Biomimetic Flexible Suction Cup System Design
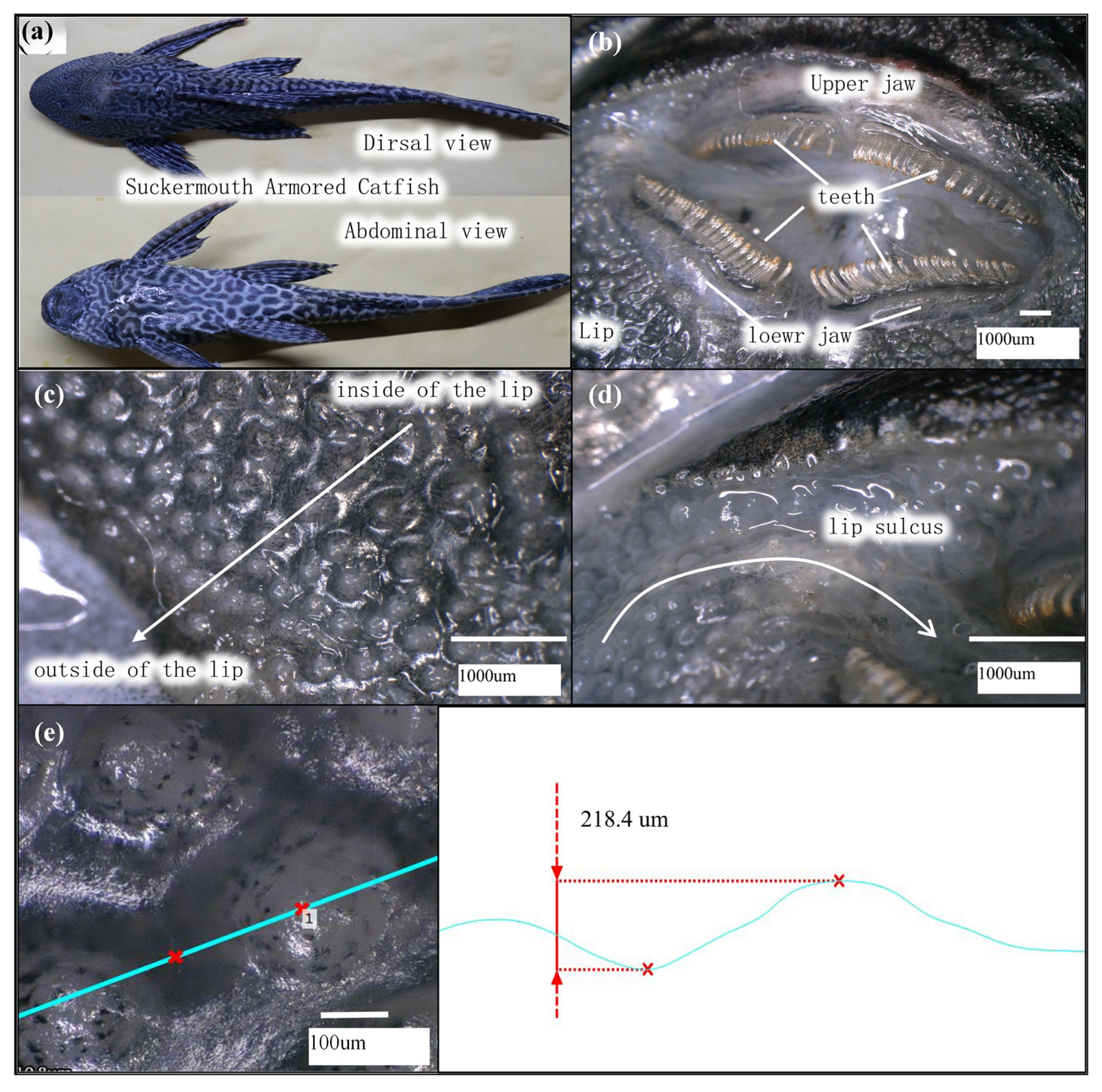
2.1.2. Design of Biomimetic Protrusion Structures
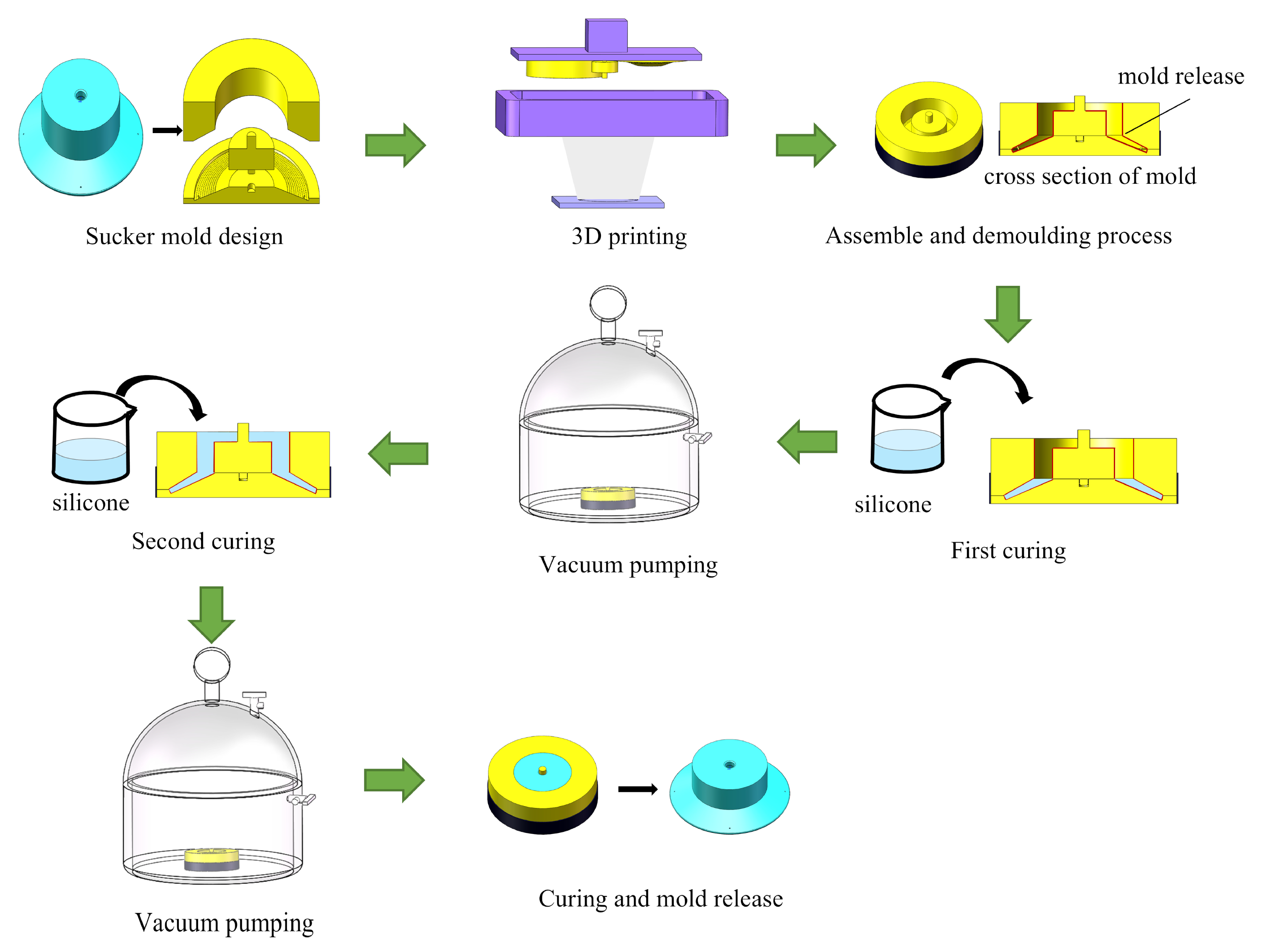
2.2. Manufacturing of Biomimetic Flexible Suction Cups
3. Results and Discussion
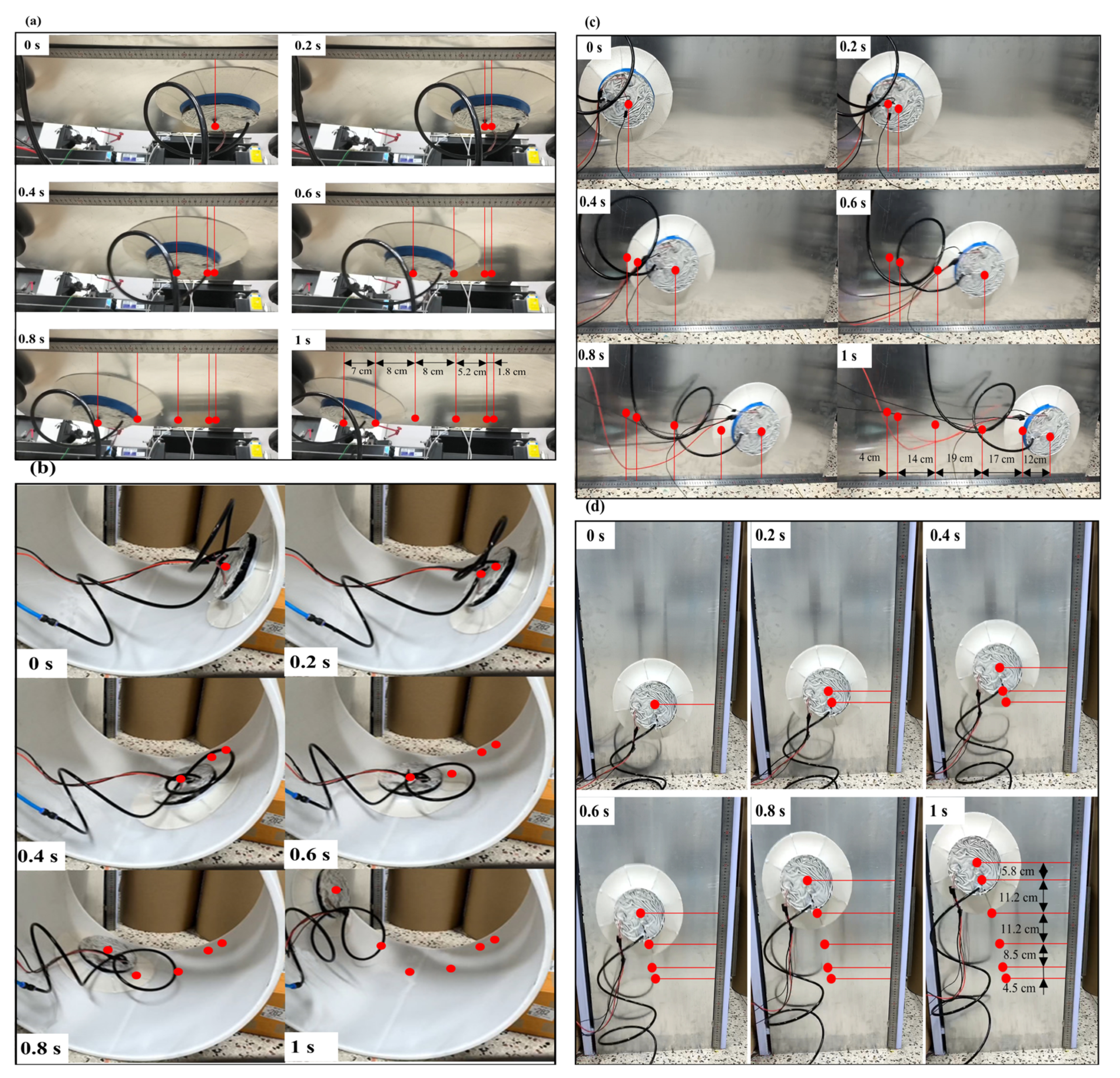
3.1. Biomimetic Sliding Suction Cup Crawling Experiment
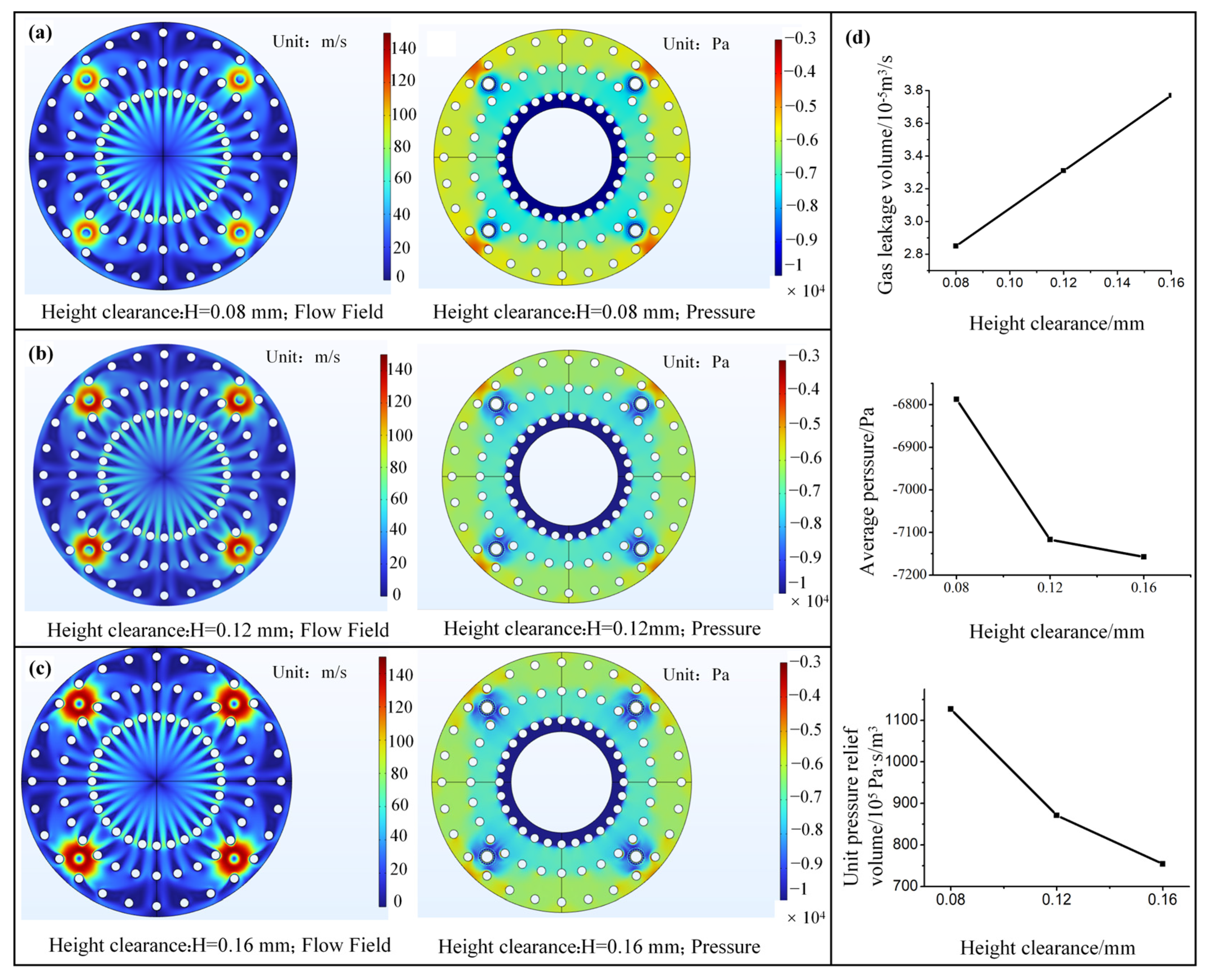
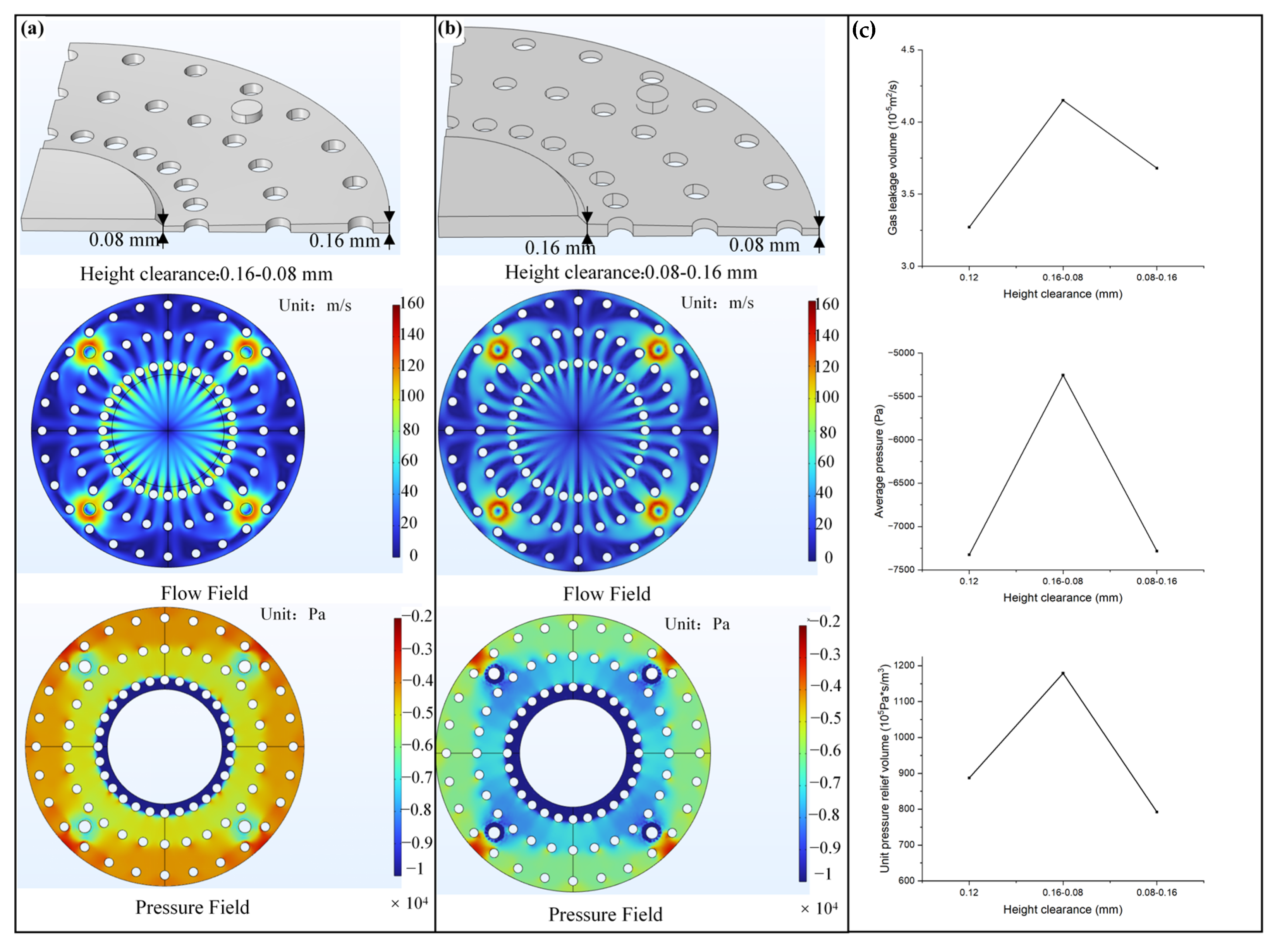
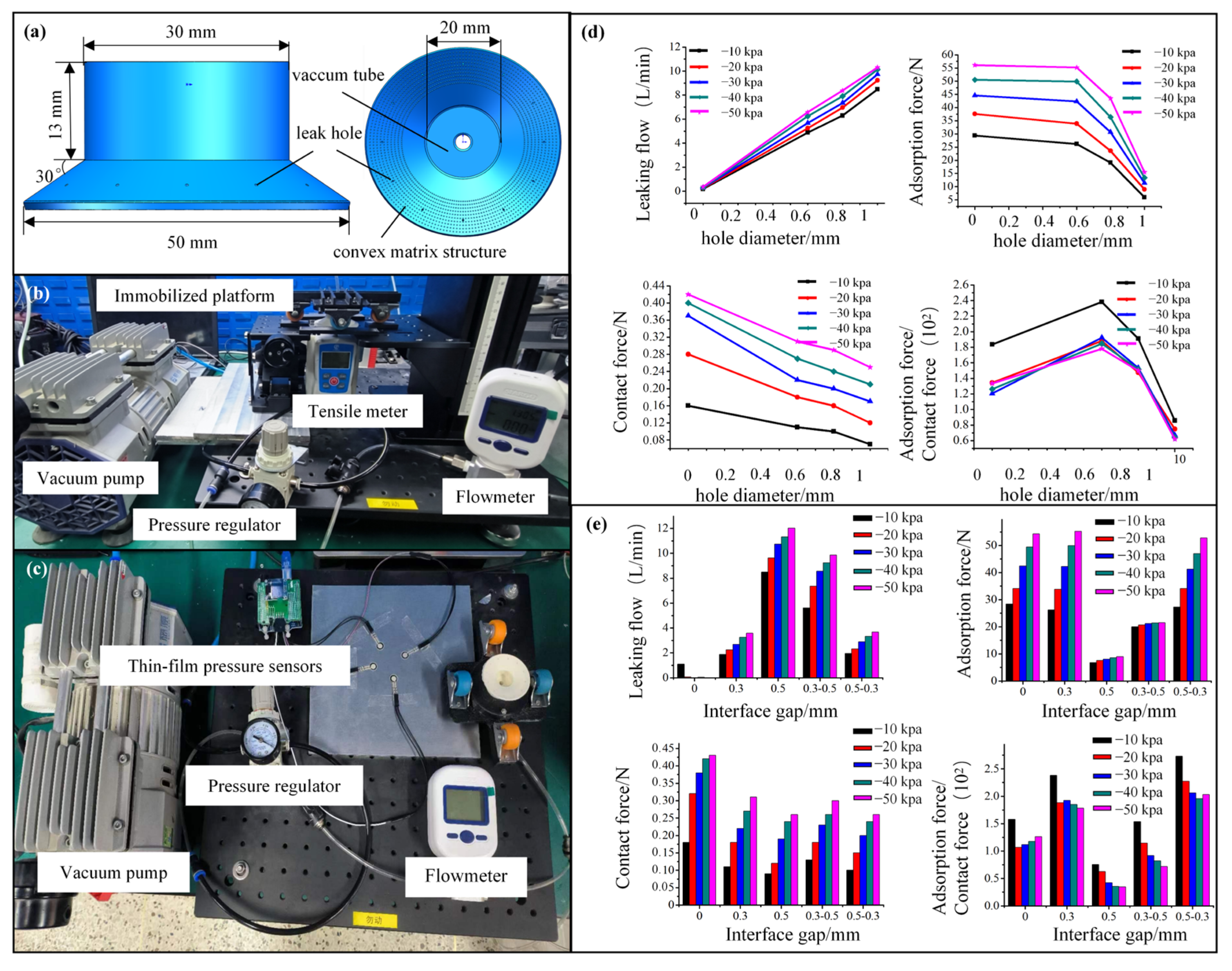
3.2. Flow Channel Structure Optimization Design and Experiment
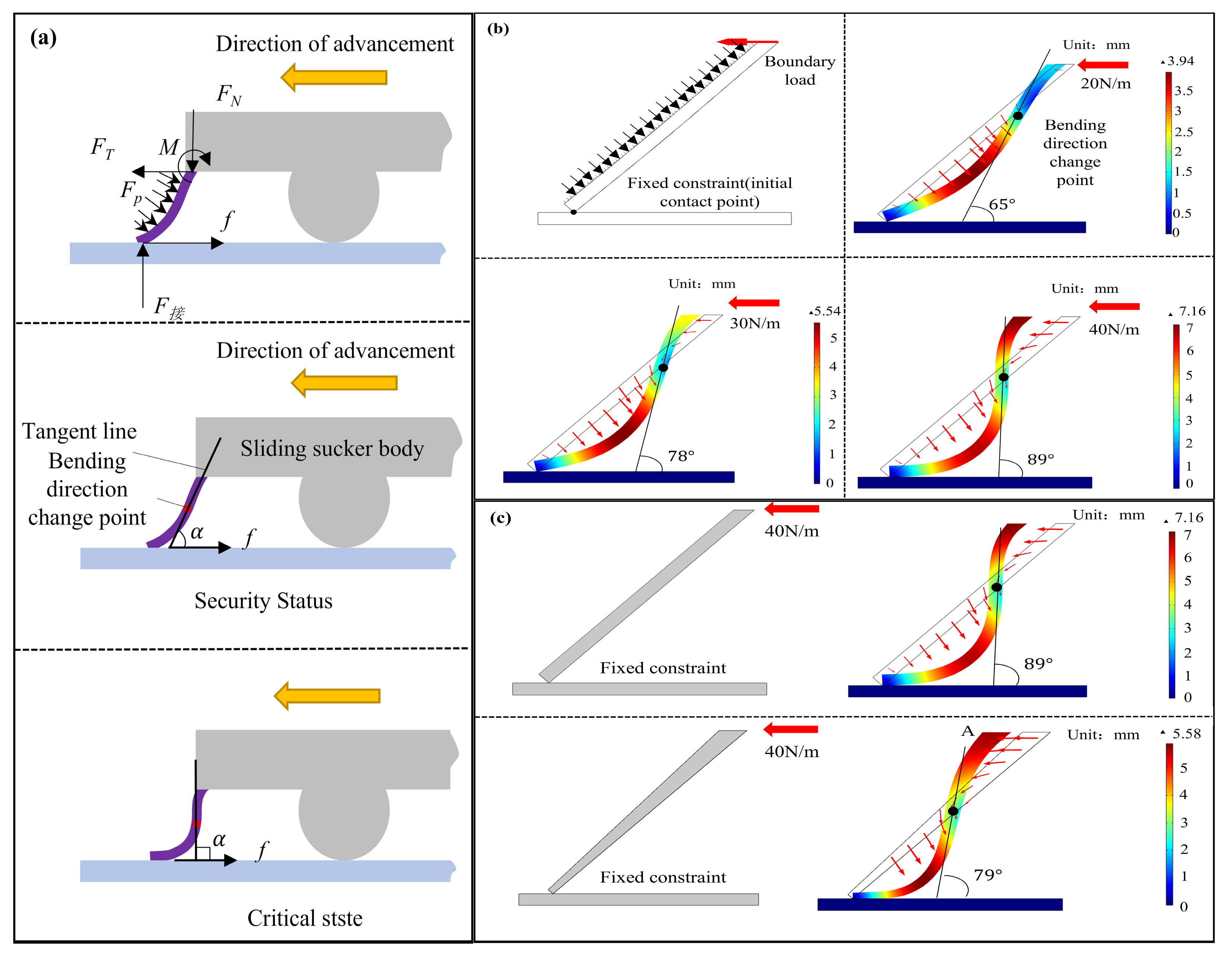
3.3. Biomimetic Flexible Lip Edge Anti-Curling Design Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Eich, M.; Bonnin-Pascual, F.; Garcia-Fidalgo, E.; Ortiz, A.; Bruzzone, G.; Koveos, Y.; Kirchner, F. A robot application for marine vessel inspection. J. Field Robot. 2014, 31, 319–341. [Google Scholar] [CrossRef]
- Seo, K.; Cho, S.; Kim, T.; Kim, H.S.; Kim, J. Design and stability analysis of a novel wall-climbing robotic platform (ROPE RIDE). Mech. Mach. Theory 2013, 70, 189–208. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Zong, G.; Wang, W.; Liu, R. Sky cleaner 3: A real pneumatic climbing robot for glass-wall cleaning. IEEE Robot. Autom. Mag. 2006, 13, 32–41. [Google Scholar] [CrossRef]
- Grieco, J.C.; Prieto, M.; Armada, M.; De Santos, P.G. A six-legged climbing robot for high payloads. In Proceedings of the 1998 IEEE International Conference on Control Applications (Cat. No. 98CH36104), Trieste, Italy, 4 September 1998; IEEE: Piscataway, NJ, USA, 1998; pp. 446–450. [Google Scholar]
- Eich, M.; Vogele, T. Design and control of a lightweight magnetic climbing robot for vessel inspection. In Proceedings of the 2011 19th Mediterranean Conference on Control & Automation (MED), Corfu, Greece, 20–23 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1200–1205. [Google Scholar]
- Tâche, F.; Fischer, W.; Caprari, G.; Siegwart, R.; Moser, R.; Mondada, F. Magnebike: A magnetic wheeled robot with high mobility for inspecting complex-shaped structures. J. Field Robot. 2009, 26, 453–476. [Google Scholar] [CrossRef]
- Hirose, S.; Nagakubo, A.; Toyama, R. Machine that can walk and climb on floors, walls and ceilings. In Proceedings of the Fifth International Conference on Advanced Robotics’ Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991; IEEE: Piscataway, NJ, USA, 1991; pp. 753–758. [Google Scholar]
- Minor, M.; Dulimarta, H.; Danghi, G.; Mukherjee, R.; Tummala, R.L.; Aslam, D. Design, implementation, and evaluation of an under-actuated miniature biped climbing robot. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000)(Cat. No. 00CH37113), Takamatsu, Japan, 1 October–5 November 2000; IEEE: Piscataway, NJ, USA, 2000; pp. 1999–2005. [Google Scholar]
- Balaguer, C.; Gimenez, A.; Jardon, A. Climbing robots’ mobility for inspection and maintenance of 3D complex environments. Auton. Robot. 2005, 18, 157–169. [Google Scholar] [CrossRef]
- Lee, G.; Kim, H.; Seo, K.; Kim, J.; Kim, H.S. MultiTrack: A multi-linked track robot with suction adhesion for climbing and transition. Robot. Auton. Syst. 2015, 72, 207–216. [Google Scholar] [CrossRef]
- De Rivaz, S.D.; Goldberg, B.; Doshi, N.; Jayaram, K.; Zhou, J.; Wood, R.J. Inverted and vertical climbing of a quadrupedal microrobot using electroadhesion. Sci. Robot. 2018, 3, eaau3038. [Google Scholar] [CrossRef]
- Gu, G.; Zou, J.; Zhao, R.; Zhao, X.; Zhu, X. Soft wall-climbing robots. Sci. Robot. 2018, 3, eaat2874. [Google Scholar] [CrossRef]
- Hu, S.; Xia, Z. Rational design and nanofabrication of gecko-inspired fibrillar adhesives. Small 2012, 8, 2464–2468. [Google Scholar] [CrossRef]
- Boesel, L.F.; Greiner, C.; Arzt, E.; del Campo, A. Gecko-inspired surfaces: A path to strong and reversible dry adhesives. Adv. Mater. 2010, 22, 2125–2137. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, H.; Cutkosky, M.R. A palm for a rock climbing robot based on dense arrays of micro-spines. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 52–59. [Google Scholar]
- Ji, A.; Zhao, Z.; Manoonpong, P.; Wang, W.; Chen, G.; Dai, Z. A bio-inspired climbing robot with flexible pads and claws. J. Bionic Eng. 2018, 15, 368–378. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, X. Experimental investigation on climbing robot using rotation-flow adsorption unit. Robot. Auton. Syst. 2018, 105, 112–120. [Google Scholar] [CrossRef]
- Qian, Z.Y.; Zhao, Y.Z.; Fu, Z. Development of wall-climbing robots with sliding suction cups. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 3417–3422. [Google Scholar]
- Gao, X.; Xu, D.; Wang, Y. Study and design of novel wall-cleaning robot system. Gaojishu Tongxin High Technol. Lett. 2004, 14, 39. [Google Scholar]
- Baik, S.; Kim, D.W.; Park, Y.; Lee, T.-J.; Bhang, S.H.; Pang, C. A wet-tolerant adhesive patch inspired by protuberances in suction cups of octopi. Nature 2017, 546, 396–400. [Google Scholar] [CrossRef] [PubMed]
- Yao, X.; Song, Y.; Jiang, L. Applications of bio-inspired special wettable surfaces. Adv. Mater. 2011, 23, 719–734. [Google Scholar] [CrossRef]
- Geng, Y.; Wang, Y.; Yan, Y.; Zhao, X. A novel AFM-based 5-axis nanoscale machine tool for fabrication of nanostructures on a micro ball. Rev. Sci. Instrum. 2017, 88, 11. [Google Scholar] [CrossRef]
- Chen, M.; Lin, Y. Static behavior and dynamic stability analysis of grooved rectangular aerostatic thrust bearings by modified resistance network method. Tribol. Int. 2002, 35, 329–338. [Google Scholar] [CrossRef]
- Ise, T.; Nakatsuka, M.; Nagao, K.; Matsubara, M.; Kawamura, S.; Asami, T.; Kinugawa, T.; Nishimura, K. Externally pressurized gas journal bearing with slot restrictors arranged in the axial direction. Precis. Eng. 2017, 50, 286–292. [Google Scholar] [CrossRef]
- Bos, E.; Moers, T.; van Riel, M. Design and verification of an ultra-precision 3D-coordinate measuring machine with parallel drives. Meas. Sci. Technol. 2015, 26, 085904. [Google Scholar] [CrossRef]
- Fan, K.-C.; Ho, C.-C.; Mou, J.-I. Development of a multiple-microhole aerostatic air bearing system. J. Micromech. Microeng. 2002, 12, 636. [Google Scholar] [CrossRef]
- Chen, D.; Zhou, S.; Han, J.; Fan, J.; Cheng, Q. Characteristics evaluation of gas film in the aerostatic thrust bearing within rarefied effect. Proc. Inst. Mech.Eng. Part J J. Eng. Tribol. 2017, 231, 149–157. [Google Scholar] [CrossRef]
- Schuh, J.K.; Ewoldt, R.H. Asymmetric surface textures decrease friction with Newtonian fluids in full film lubricated sliding contact. Tribol. Int. 2016, 97, 490–498. [Google Scholar] [CrossRef]
- Rosenkranz, A.; Costa, H.L.; Baykara, M.Z.; Martini, A. Synergetic effects of surface texturing and solid lubricants to tailor friction and wear—A review. Tribol. Int. 2021, 155, 106792. [Google Scholar] [CrossRef]
- Yu, H.; Han, Z.; Zhang, J.; Zhang, S. Bionic design of tools in cutting: Reducing adhesion, abrasion or friction. Wear 2021, 482, 203955. [Google Scholar] [CrossRef]
- Yang, X.; Xia, R.; Zhou, H.; Guo, L.; Zhang, L. Bionic surface design of cemented carbide drill bit. Sci. China Technol. Sci. 2016, 59, 175–182. [Google Scholar] [CrossRef]
- Xiao, L.J.; Zhuang, L.F. Influence of convex hull density on friction contact of bionic surface. Adv. Mater. Res. 2011, 308, 483–489. [Google Scholar] [CrossRef]
- Ren, L. Progress in the bionic study on anti-adhesion and resistance reduction of terrain machines. Sci. China Ser. E Technol. Sci. 2009, 52, 273–284. [Google Scholar] [CrossRef]
- Soni, P.; Salokhe, V.; Nakashima, H. Modification of a mouldboard plough surface using arrays of polyethylene protuberances. J. Terramech. 2007, 44, 411–422. [Google Scholar] [CrossRef]
- Adriaens, D.; Geerinckx, T.; Vlassenbroeck, J.; Van Hoorebeke, L.; Herrel, A. Extensive jaw mobility in suckermouth armored catfishes (Loricariidae): A morphological and kinematic analysis of substrate scraping mode of feeding. Physiol. Biochem. Zool. 2009, 82, 51–62. [Google Scholar] [CrossRef]
- Geerinckx, T.; Herrel, A.; Adriaens, D. Suckermouth armored catfish resolve the paradox of simultaneous respiration and suction attachment: A kinematic study of Pterygoplichthys disjunctivus. J. Exp. Zool. Part A Ecol. Genet. Physiol. 2011, 315, 121–131. [Google Scholar] [CrossRef]
- Soliman, S.A.; Kamal, B.M.; Abuo-Elhmad, A.S.; Abd-Elhafeez, H.H. Morphological and histochemical characterization of the dermal plates of pleco (Hypostomus plecostomus). Microsc. Microanal. 2020, 26, 551–566. [Google Scholar] [CrossRef]
- Xiao, P.; Wang, Z.; Zhou, K.; Fan, X.; Zhang, Y.; Sun, G.; Zhu, L. Hypostomus plecostomus-inspired soft sucker to adsorb slippery tissues: A stabilizing post-valvular cavity and stiffness gradient materials provide excellent adsorption performance. Bioinspiration Biomim. 2024, 19, 056019. [Google Scholar] [CrossRef] [PubMed]
- Tan, W.; Zhang, C.; Wang, R.; Fu, Y.; Chen, Q.; Yang, Y.; Wang, W.; Zhang, M.; Xi, N.; Liu, L. Uncover rock-climbing fish’s secret of balancing tight adhesion and fast sliding for bioinspired robots. Natl. Sci. Rev. 2023, 10, nwad183. [Google Scholar] [CrossRef] [PubMed]
- Zou, J.; Wang, J.; Ji, C. The adhesive system and anisotropic shear force of Guizhou Gastromyzontidae. Sci. Rep. 2016, 6, 37221. [Google Scholar] [CrossRef] [PubMed]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, E.; Zhou, X.; Liu, Y.; Xue, J.; Xiong, S.; Zhang, D. A Biomimetic Flexible Sliding Suction Cup Suitable for Curved Surfaces. Biomimetics 2025, 10, 137. https://doi.org/10.3390/biomimetics10030137
Cui E, Zhou X, Liu Y, Xue J, Xiong S, Zhang D. A Biomimetic Flexible Sliding Suction Cup Suitable for Curved Surfaces. Biomimetics. 2025; 10(3):137. https://doi.org/10.3390/biomimetics10030137
Chicago/Turabian StyleCui, Enhua, Xiangcong Zhou, Yanqiang Liu, Jixiao Xue, Siyuan Xiong, and Deyuan Zhang. 2025. "A Biomimetic Flexible Sliding Suction Cup Suitable for Curved Surfaces" Biomimetics 10, no. 3: 137. https://doi.org/10.3390/biomimetics10030137
APA StyleCui, E., Zhou, X., Liu, Y., Xue, J., Xiong, S., & Zhang, D. (2025). A Biomimetic Flexible Sliding Suction Cup Suitable for Curved Surfaces. Biomimetics, 10(3), 137. https://doi.org/10.3390/biomimetics10030137