1. Introduction
From the sea to the land, mollusks can be found everywhere, with examples in the ocean including jellyfish, octopi, and, squids. On land, examples include slugs, earthworms, and soft insect larvae. Their living environment shows a rich diversity: forests, mountains, rock piles, grasses, swamps, and even the sea [
1]. Through their soft bodies and complex locomotor mechanisms, these organisms show strong environmental adaptability, as they moves freely in these living environments, climbing trees, swimming, burrowing, and bypassing obstacles [
2]. Although a soft-bodied organism’s carapace appears to be just a thin rope, it possesses powerful functions: it can bear weight like a leg when moving forward, grab things like an arm when climbing, and be as flexible as a finger when grasping objects. Despite this structure’s seeming simplicity, powerful features are behind it [
2].
Inspired by these soft organisms, humans have summarized the natural principles they contain, mimicked these natural organisms, and applied these principles to develop various bionic soft robots. Examples include bionic frog robots [
3], bionic fish robots [
4], bionic octopus robots [
5], and bionic elephant trunk robots [
6]. The soft robots are constructed using flexible materials and thus are mechanically flexible. This flexibility can bring many advantages to soft robots. For example, when a soft robot interacts with the external environment, it can be passively deformed, allowing for a larger contact area between the robot and the environment and better environmental adaptability [
7]. This flexibility can even allow the robot to squeeze into tight gaps that are unreachable by traditional rigid robots [
8,
9]. The better environmental adaptability of soft robots expands the ability of humans to explore dangerous structures, extreme environments, and hard-to-reach spaces [
10].
Soft robots working on land use a single mode of locomotion, consisting mainly of crawling, legged locomotion, and jumping [
11]. The single mode of locomotion makes soft robots have good locomotion in specific environments but poor performance in other environments [
12]. The application scenarios of soft robots are limited. Crawling and legged locomotion allow for flexibly avoiding obstacles in unstructured environments and adapting to complex terrain [
12]. However, the slower gait and shorter step length in flatter environments lead to a large motion efficiency gap between soft and traditional wheeled robots. Jumping motion can quickly cover longer distances in a short time, enabling a robot to quickly pass obstacles or hazardous areas [
11,
12]. However, it may be less applicable in some scenarios that require precise movement or stable motion over a long duration [
13]. Therefore, it is of great research significance to try to combine multiple motion modes to design a soft robot with multiple motion modes.
Leg–wheel robots are mobile robots with multiple forms of motion. Such robots combine the high energy efficiency of wheeled robots in flat terrain and the high mobility of legged robots in complex terrain [
14]. However, few robots can achieve leg–wheel motion among the current soft robots. This may be because few biological structures in nature can continuously turn around [
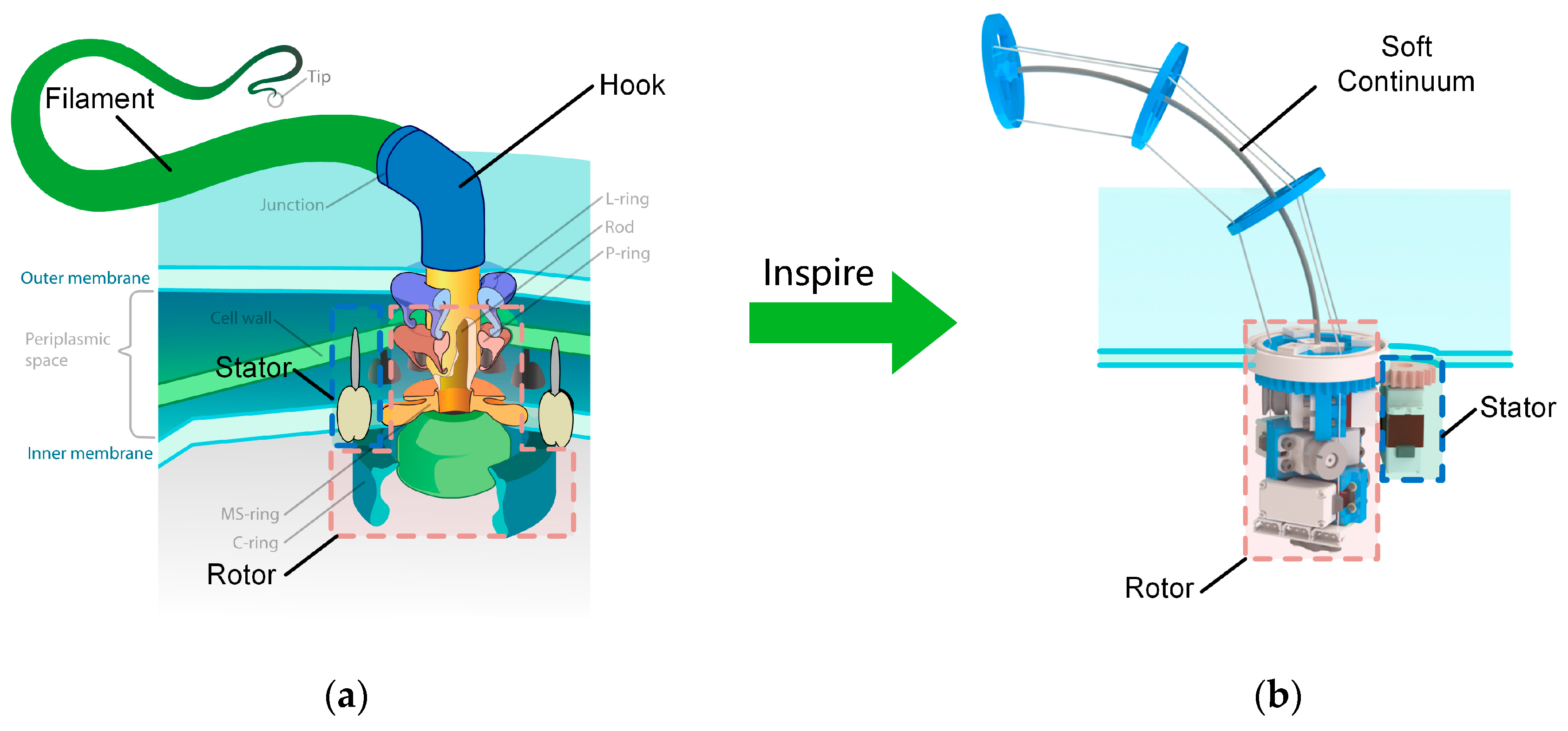
15], which makes it difficult for humans to learn how to design soft-body structures that can continuously turn around. The bacterial flagellum is one of the few biological structures in nature that can achieve continuous rotation [
16]. The rotational motion of the bacterial flagellar filaments, driven by a motor at their base, propels the bacterium [
17], as shown in
Figure 1a.
This work introduces a novel leg–wheel mechanism called the BFWL module, inspired by bacterial flagella. The BFWL module incorporates a tendon-driven continuum structure as its soft-body component, resembling the flagellar filaments found in bacteria, as shown in
Figure 1b. The robot achieves wheeled motion by inducing twisting movements in its soft parts, akin to the rotational motion of a bacterial flagellar filament driven by a base motor. Additionally, legged motion is accomplished by swinging the soft-body component. The subsequent sections of this paper are organized as follows:
Section 2 details the mechanical design of the BFWL module and the BFWLbot.
Section 3 presents the kinematic analysis.
Section 4 presents simulation experiments performed on the BFWLbot.
Section 5 shows the prototype of the BFWL module with BFWLbot and experiments performed on the prototype.
Section 6 provides a conclusion and discusses future work.
5. Experimental Tests
5.1. Wheeled Motion Experiment
Based on the layout of the structure in
Figure 4a, the prototype of the BFWLbot is built as shown in
Figure 17. In the experiments on the robot prototype, Aruco tags and OpenCV are used for robot trajectory tracking. An Aruco tag with ID 1 was attached to the front of the top of the robot, and an Aruco tag with ID 2 was attached to the back of its top. The Aruco tags with ID 3 and 4 were attached to the left and right of the BFWLbot prototype body, respectively. These labels are in 6 × 6 format and have a size of 30 × 30 mm.
To verify its feasibility for wheeled motion, the first experiment was on the straight wheeled motion of the BFWLbot. The parameters in
Table 5 were used as the input of motion parameters for its four BFWL modules, and the robot’s body was lifted about 20 mm from the ground at t = 0 s. Four BFWL modules were twisting to propel the robot’s motion. The experimental process was captured on camera, and the Aruco tag with ID 3 on the BFWLbot was detected in real time using OpenCV, followed by plotting the robot motion trajectory on a graph using Python. The motion process is summarized in
Figure 18.
Based on the trajectory in the figure, the BFWLbot prototype successfully completes the straight wheel motion, but its body appears to have regular upward and downward fluctuations. The reason for this phenomenon is that the stiffness anisotropy existing in the tendon-driven continuum structure makes the bending stiffness of the BFWL module variable in different directions. As a result, the height of the BFWL module changes periodically with the change in the twisting angle τ during the twisting process. In the future, higher-level motion control algorithms can be further developed to achieve suppression of this regular vibration to make the BFWLbot operate more smoothly.
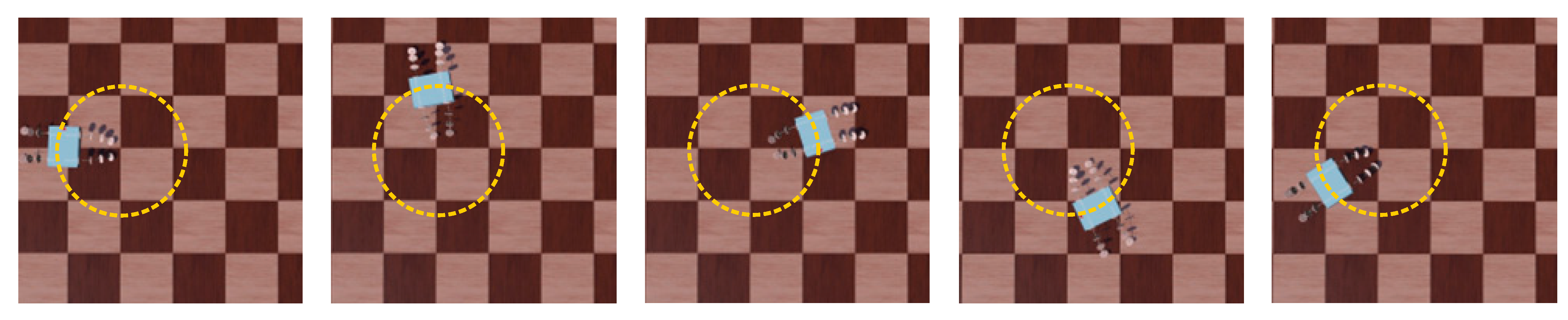
The next experiment was on the wheeled steering motion of the BFWLbot. The parameters in
Table 6 were used as input for the motion parameters of the four BFWL modules. Experiments were conducted using these parameters as input parameters for the motion of the BFWLbot. The experimental process was filmed using a camera. The Aruco tag with ID 1 on the BFWLbot was captured in real time using OpenCV, which was followed by plotting the robot motion trajectory on a graph using Python. The motion process is summarized in
Figure 19.
The BFWLbot moves with a circular trajectory. Based on the estimation of the position of the Aruco tag with ID 1, the motion radius is about 385.8 mm, and there is a gap of 31.3 mm between the starting point and the ending point. There is some deviation from the expected circular trajectory. After further analysis, it is concluded that this error is mainly due to the characteristics of the tendon-driven continuum, such as the deformation of the continuum and the change in the bending angle, which can lead to errors during the robot’s motion. Meanwhile, the mechanical characteristics of the tendon-driven continuum also impact the accuracy of its motion trajectory. Therefore, the softness of the legs needs to be considered in practical applications, and the improvement of the motion accuracy and stability of the robot will be achieved by controlling and optimizing such characteristics accordingly.
5.2. Gait Experiment
To validate the correctness of the gait planning, the BFWLbot executed its quadrupedal swinging motion using the derived gait pattern described in
Section 3.4. At t = 0 s, the robot’s body was lifted approximately 20 mm above the ground level. The experiment was recorded using a video camera, and real-time detection of the Aruco tag with ID 3 on the BFWLbot was performed using OpenCV. The robot’s motion trajectory was then plotted using Python, as illustrated in
Figure 20.
The trajectory in the figure shows that the BFWLbot prototype successfully achieved legged motion, and the Aruco tag on the robot traced a relatively straight trajectory. This shows that the robot can complete legged motion and confirms the effectiveness of the prototype. Through this experiment, the feasibility of BFWLbot’s legged motion at the prototype level has been verified and basic data has been provided for subsequent experiments. This means that the design and implementation of BFWLbot will have broader application prospects and can be used in various scenarios that require legged motion, such as walking or crawling in uneven or complex terrain.
5.3. Post-Overturning Motion Experiment
Robot overturning is a common cause of robots not working normally during robot motion, especially in complex environments, where robots are often faced with unpredictable obstacles and terrain that can cause them to overturn [
24]. Robot overturning not only causes damage and stops the robot from working but also may lead to safety risks in dangerous environments, so it is important to resume work quickly after the robot is overturned.
BFWLbot is a structurally symmetric robot. Based on the analysis of the structural principle, when it overturns, BFWLbot can still interact with the environment by changing the legs’ rotation or bending angles. Therefore, this paper will simulate the BFWLbot in the case of overturning during operation and experiment with whether it can continue to move normally after the overturning. The experimental process is also filmed with a video camera, and the Aruco tag with ID 4 on the BFWLbot is detected in real time using OpenCV, after which the robot motion trajectory is drawn on a graph using Python. The motion process is summarized in
Figure 21.
As shown in
Figure 21, the BFWLbot was flipped to the bottom-side-up state on a flat surface, and the experiment started. The bending angle of the controlled quadruped module changed from −50
to 50
, so the quadruped module of the BFWLbot changed from the state shown in
Figure 21a to the state shown in
Figure 21c. The quadruped module gradually contacts the ground and supports the robot body off the ground. Finally, the wheeled motion program is started, as shown in
Figure 21d, and the BFWLbot successfully performs wheeled straight motion.
Based on the above process, BFWLbot can change the working position of a leg by changing the rotation angle or bending angle of the leg after overturn and continue to move normally. This characteristic shows that the BFWLbot has good environmental adaptability and will not stop working due to overturning in the face of complex environments. This is very important for the robot in practical applications.
6. Discussion
Soft robots exhibit flexibility due to their bodies being constructed from deformable materials, enabling them to navigate confined spaces and traverse uneven terrain with ease. This paper introduces a novel leg–wheel mechanism inspired by bacterial flagella. We designed a soft-limb robot named the BFWLbot based on this mechanism, capable of executing both wheeled and legged motions.
In contrast to existing soft-limb robots [
11], the BFWLbot eliminates the need for repetitive lifting of its four limbs while moving on flat terrain by incorporating wheeled motion. Consequently, it can move forward or change direction directly using wheeled motion, resulting in reduced energy consumption. With the integration of two locomotion modes, the BFWLbot possesses redundancy in its movements. In case of locomotion failure or limited space for a specific locomotion mode, the BFWLbot can rely on the alternative mode to maintain its movement. For instance, when the robot encounters a confined environment where leg swinging is limited due to insufficient working space, it can transition to the wheeled locomotion mode to maintain its mobility. This redundancy improves the reliability and robustness of the robot, making it less susceptible to a single point of failure.
The BFWLbot has flexibility in its limbs and symmetry in its overall structure. As compared to soft-limb robots whose legs can only function on one side of the body [
33,
34], the BFWLbot can control its legs to bend backward to reestablish contact with the ground after flipping. This feature enhances the robustness of the soft-limb robot, enabling it to navigate complex environments more effectively. Benefiting from the flexibility of its limbs, the BFWLbot can control the bending angle of each limb to change its body height off the ground. This capability enables the BFWLbot to more effectively navigate obstacles and gaps of varying heights in the environment than leg–wheel robots with fixed working heights [
14].
Robots usually have better steadiness during wheeled motion than during legged motion. Observing the motion trajectory of the BFWLbot in wheeled motion and legged motion reveals that its steadiness in wheeled motion does not surpass that in legged motion. This phenomenon arises from the stiffness anisotropy of the tendon-driven continuum structure, leading to varying bending stiffness of the BFWL module in different directions. As a result, the robot's height from the ground exhibits regular undulations with the changing twisting angle τ. This undulation has a potential impact on the sensors that may be mounted on the robot in the future. In future versions, this undulation needs to be inhibited by improving the structure, applying a more accurate continuum-modeling approach [
35], and implementing advanced motion control algorithms [
36] simultaneously.
The BFWLbot benefits from the flexibility of the soft limbs, but it also faces limitations. The flexibility of the soft limbs results in a lower load capacity for the robot compared to rigid robots [
37]. In our ongoing experiments, we found that the current prototype can carry a 361 g load. However, as we consider the possibility of future research involving an amphibious robot based on the BFWLbot design, where the discs function as propellers, the sealing of the robot will bring more additional self-weight. This requires us to increase the load capacity of the robot in future versions to achieve a balance between environmental adaptability and functionality of this robot. The current control method of the tendon in this work is position control. The flexibility of the robot under this control method comes entirely from the mechanical structure. The hybrid force-position control [
38] of the continuum can add controlled flexibility to the limbs. This controlled flexibility can also compensate for the stiffness anisotropy of the tendon-driven continuum structure. Future research will explore new tendon control methods to further enhance the soft limbs' ability to interact with the environment safely.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}