
Research on AUV Multi-Node Networking Communication Based on Underwater Electric Field CSMA/CA Channel


Abstract
1. Introduction
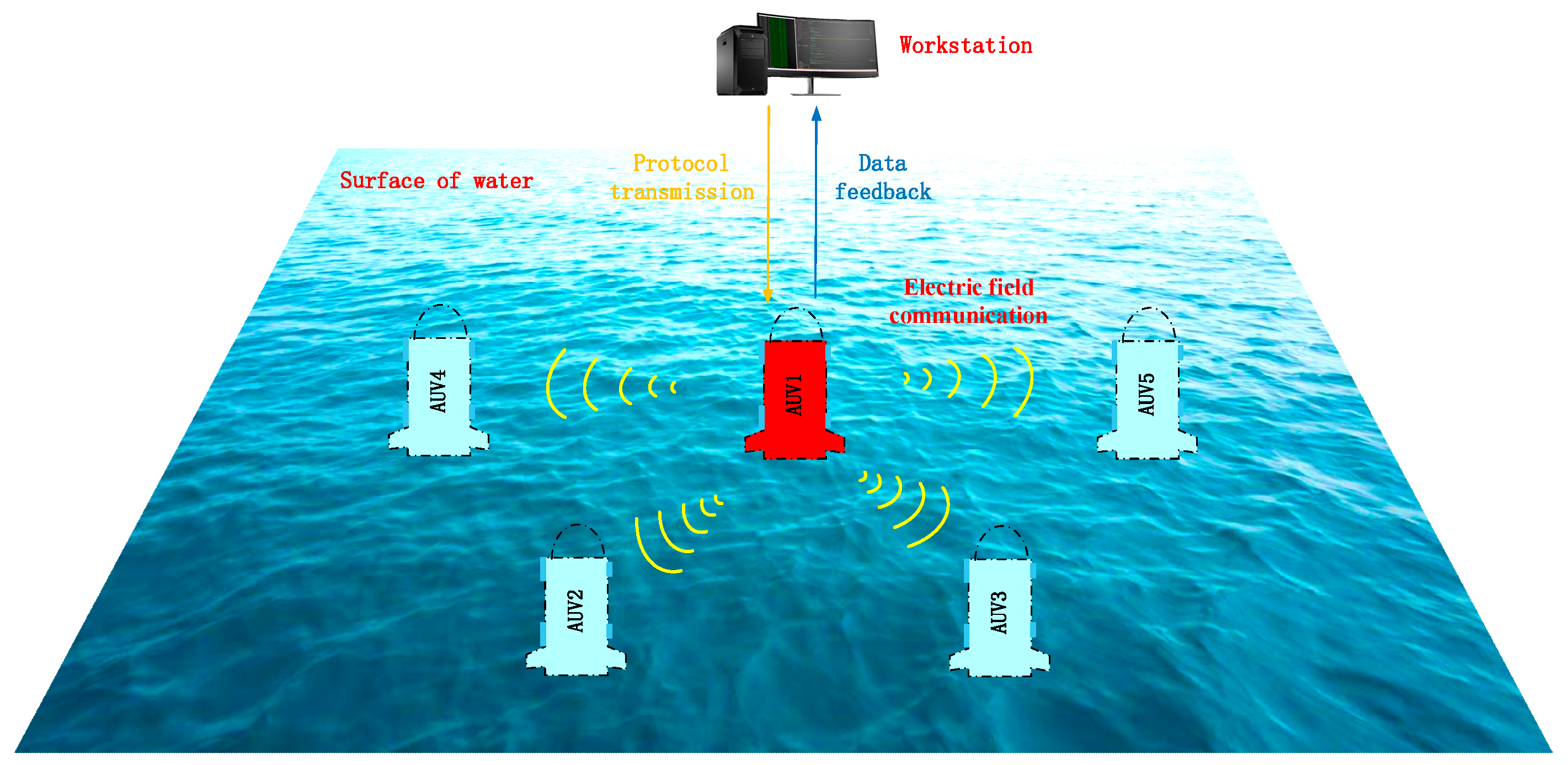
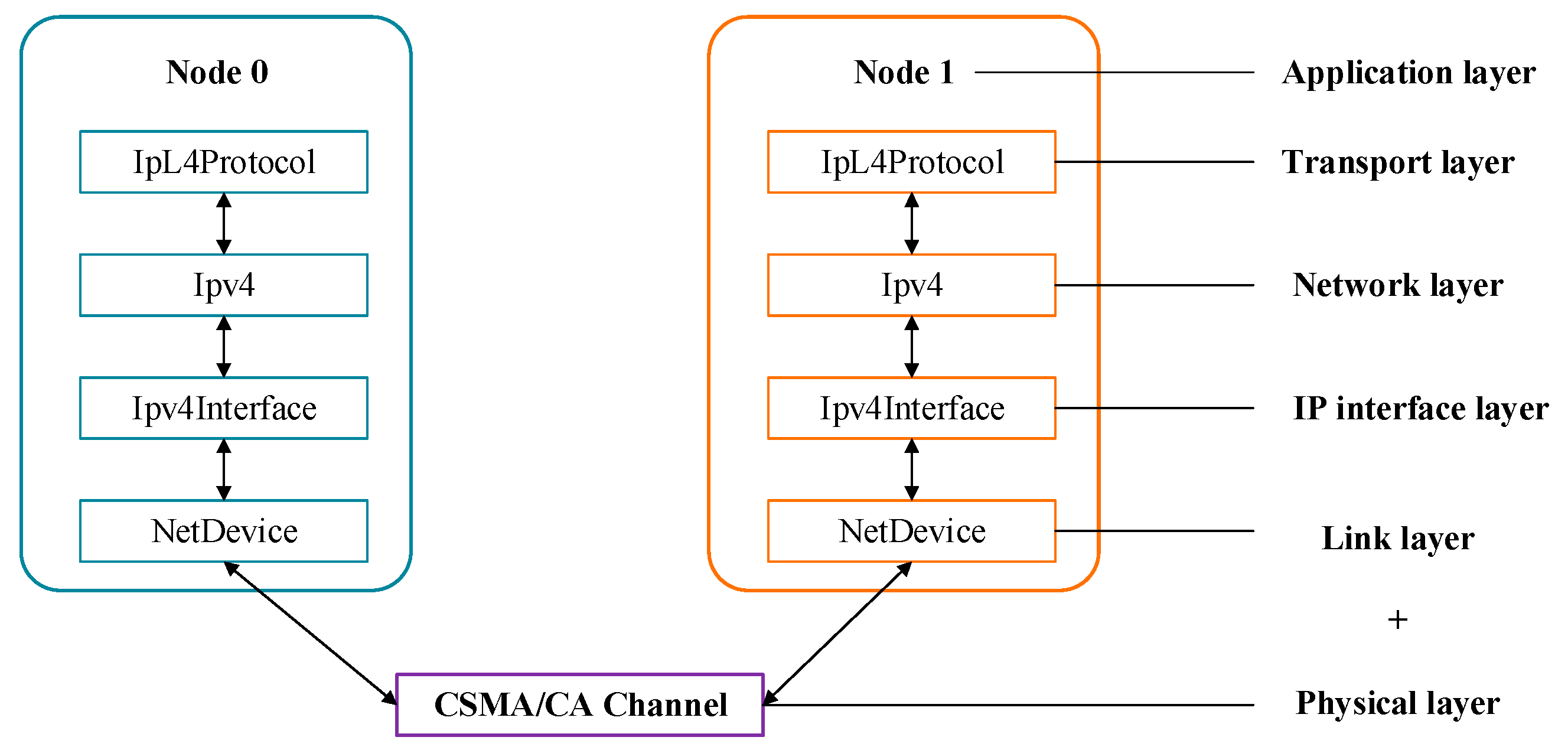
2. Simulation Model Setting for Underwater Electric Field Communication
3. Simulation of Underwater Electric Field Communication
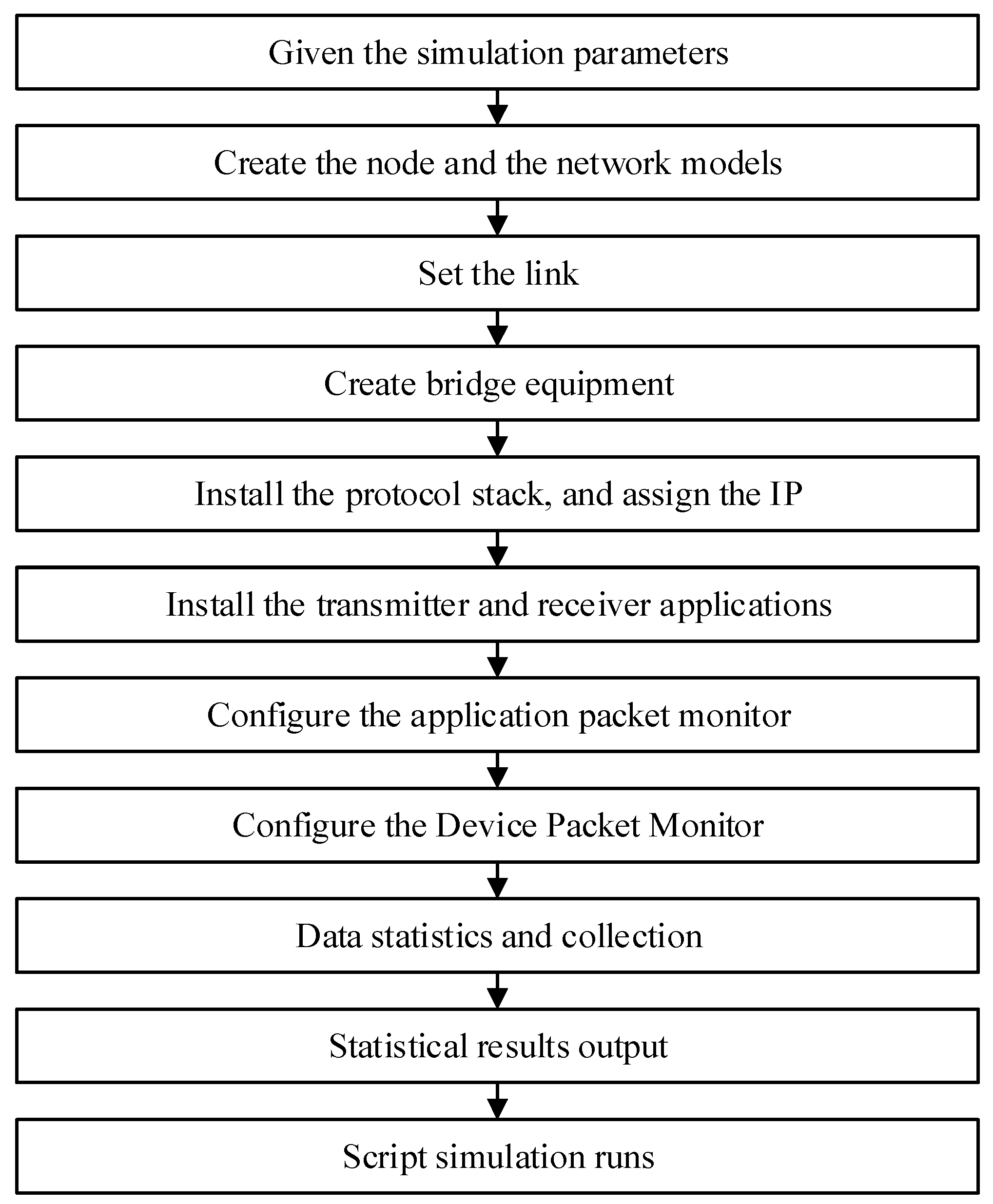
3.1. Underwater Electric Field Communication Simulation Flow Setup
3.2. Analysis of Underwater Electric Field Communication Simulation Results
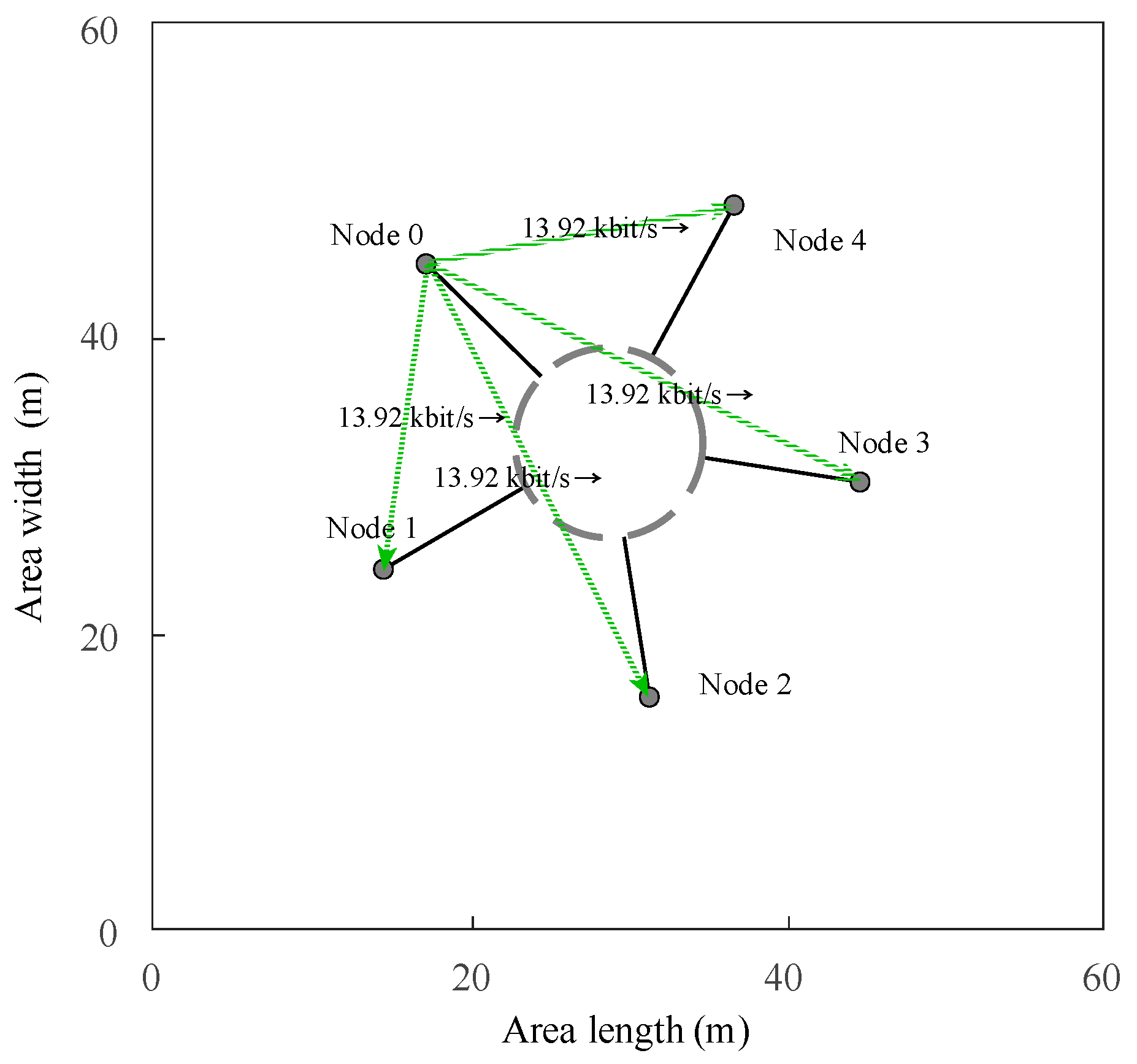
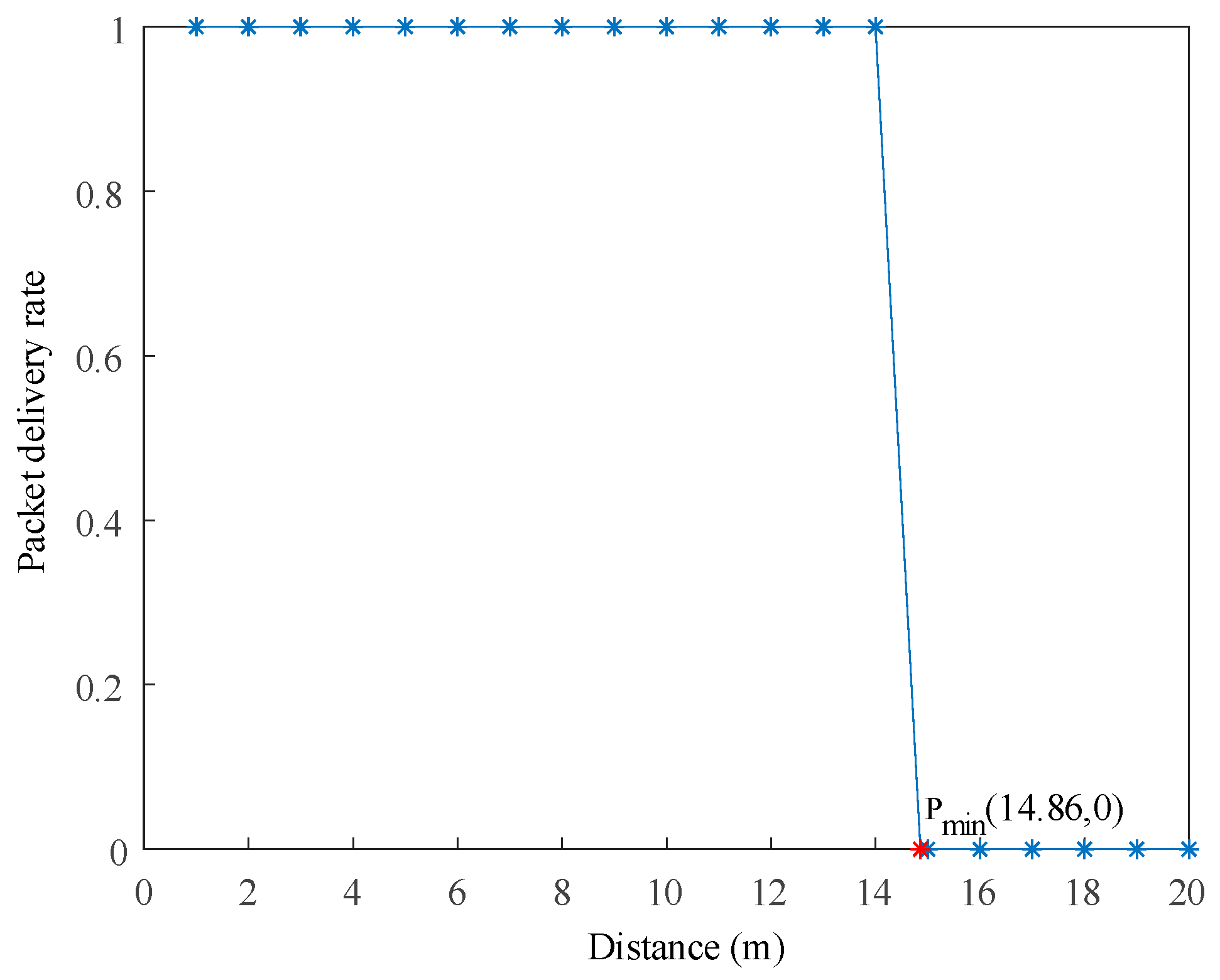
3.2.1. Underwater Electric Field Communication Distance Simulation Testing
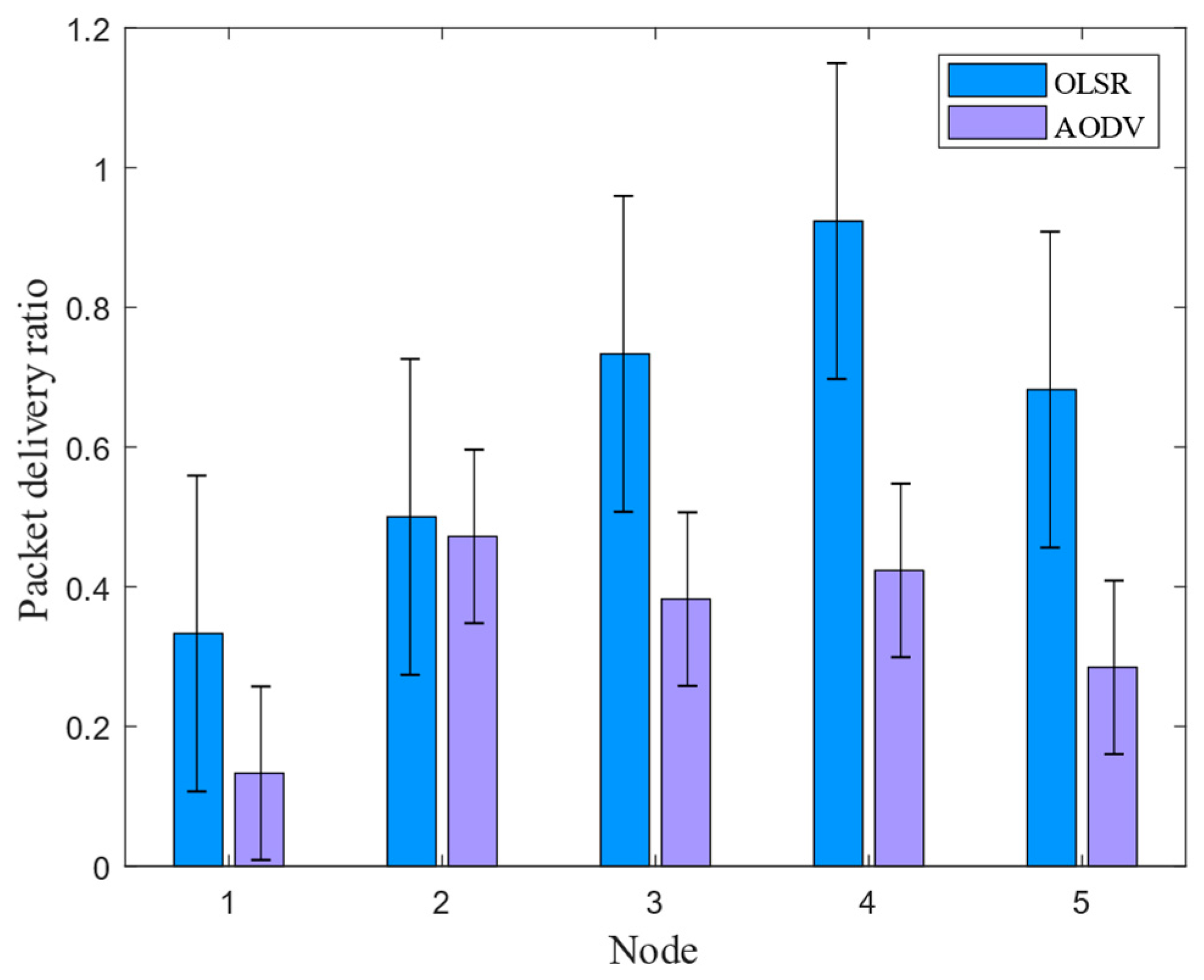
3.2.2. Underwater Electric Field Communication Packet Delivery Rate Simulation Test
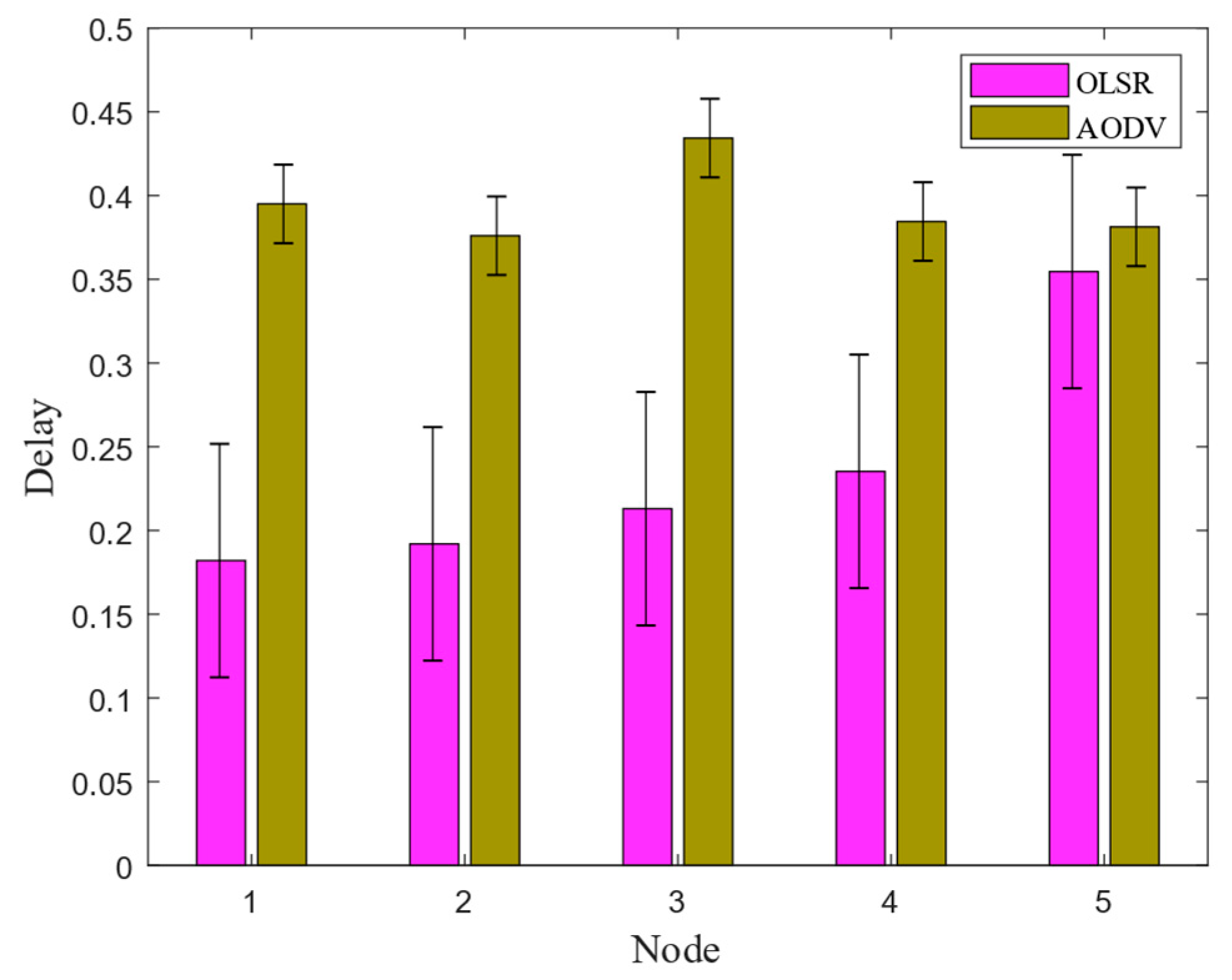
3.2.3. Underwater Electric Field Communication End-to-End Delay Simulation Test
4. Design and Experimental Verification of Backoff Protocol for Underwater Electric Field Communication Channel
4.1. CSMA/CA Channel Backoff Algorithm Design and Simulation Analysis
| Algorithm 1 An algorithm with CSMA/CA backoff protocol |
| while Channel detection is Idle do |
| Distributed inter frame spacing |
| if Channel detection is Busy then |
| Random backoff process |
| Random number(R) selection |
| Time slot t delay |
| if Channel detection is Idle then |
| R = R − 1 |
| if R = 0 then |
| Data transmission |
| else |
| Time slot t delay |
| end if |
| else |
| Time slot t delay |
| end if |
| else |
| Data transmission |
| end if |
| end while |
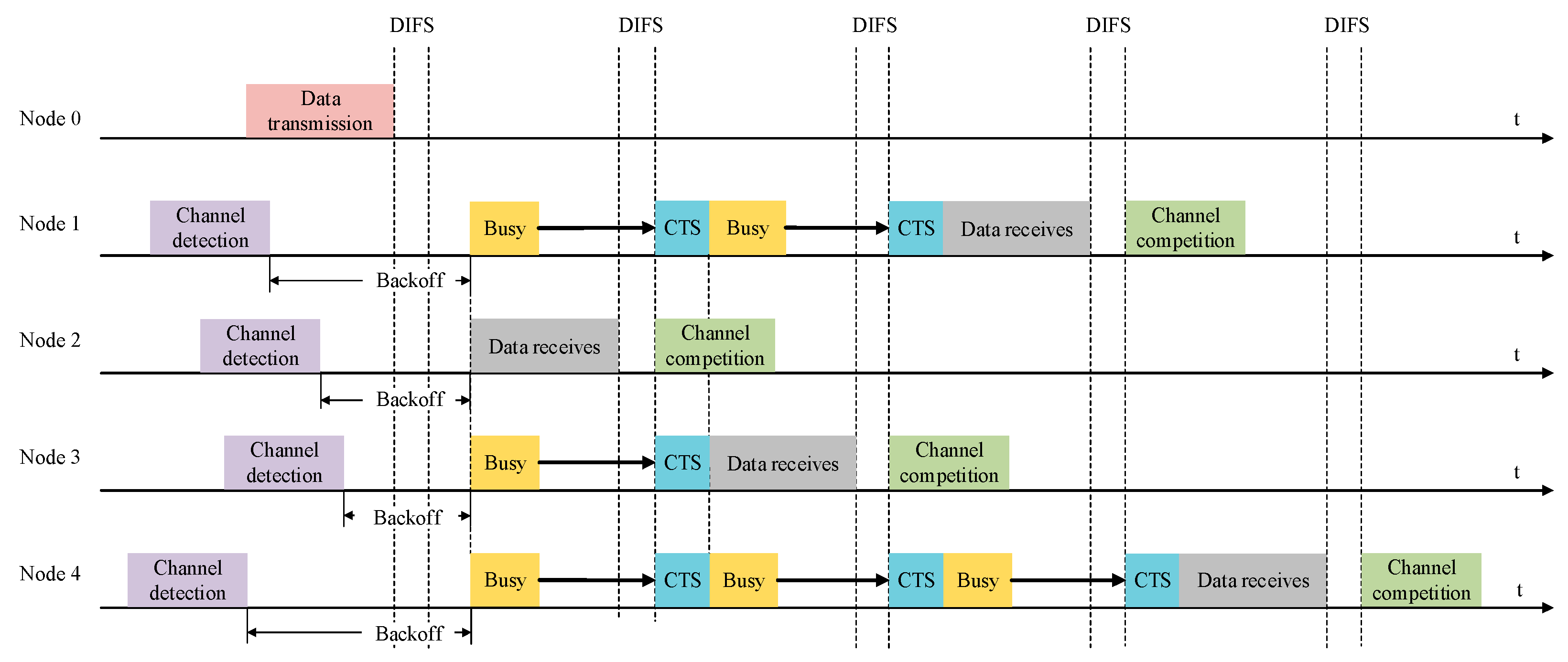
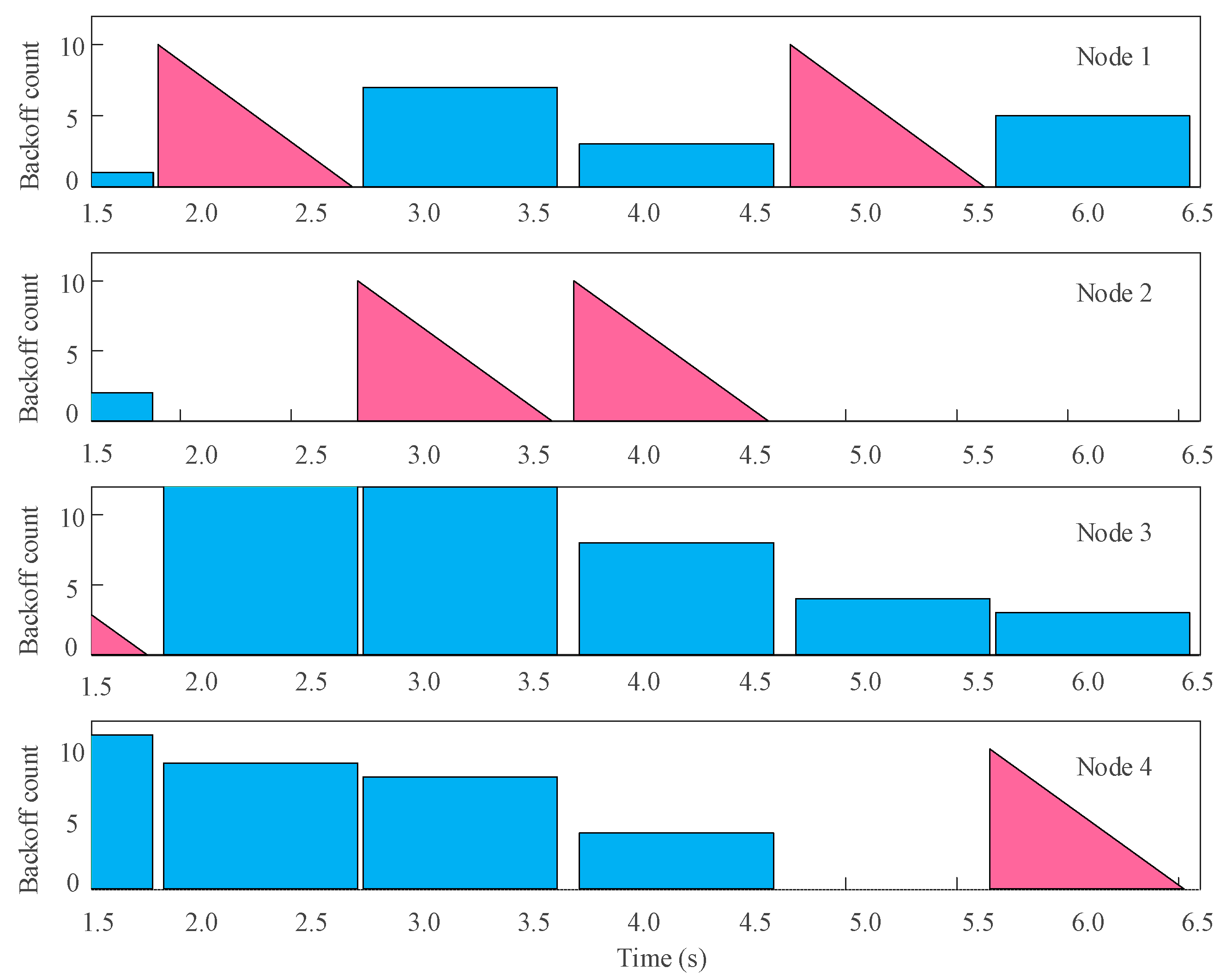
- At t = 1.85 s, Node 3 generated a communication request and detected an idle channel. After waiting for DIFS, the node started transmitting the entire frame (the first triangle in Figure 3);
- At t = 1.91 s, after Node 3 finished transmitting the signal, the channel became idle again and generated a new data transmission request. Nodes 1, 2, and 4 were in a random wait process, and Node 1, with the lowest random backoff number, started occupying the channel for data transmission;
- At t = 2.58 s, Node 2’s random B number became 0, and the channel was not occupied. Node 2 started sending data;
- At t = 3.72 s, Node 2 requested to occupy the channel again, but after DIFS and two-channel detections, the channel was still not occupied by other nodes. Therefore, Node 2 was allowed to prioritize channel occupancy;
- At t = 4.73 s and t = 5.62 s, Node 1 and Node 4’s random backoff numbers became 0 one after another, and they were allowed to use the channel.
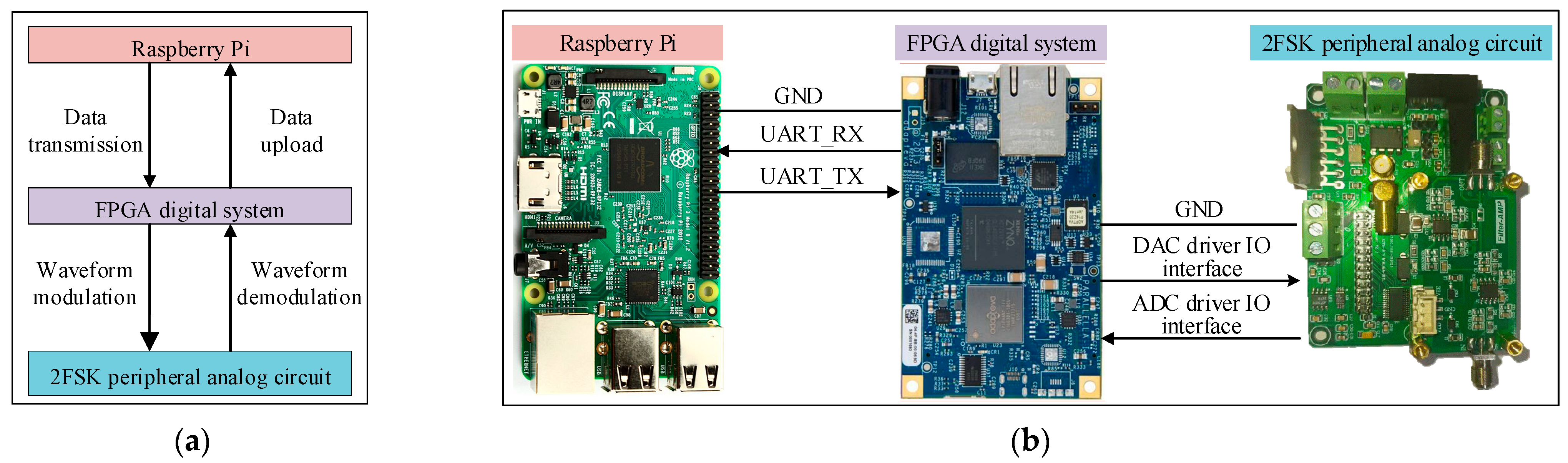
4.2. Design and Implementation of Underwater Electric Field Multi-Node Communication System Based on Raspberry Pi
4.2.1. Software Environment Setup
4.2.2. Launch Circuit Excitation Signal
4.2.3. CSMA/CA Channel Backoff Protocol
| Algorithm 2 An CSMA/CA backoff protocol process |
| While (1) do |
| if Data_bu f = = 0 then |
| while(1) |
| else |
| if Uart_rec_flag = = 0 then |
| Delay(DIFS) |
| if Uart_rec_flag! = 0 then |
| Uart_rec_flag = 0 |
| T = Random() |
| Delay(t) |
| if Uart_rec_flag! = 0 then |
| Uart_rec_flag = 0 |
| else |
| T = T − 1 |
| if T = 0 then |
| Set_PWM_handware(18, 12000, 50000) |
| Uart_send(Data_buf) |
| Set_PWM_handware(18, 12000, 0) |
| Data_buf = 0 |
| while(1) |
| else |
| Delay(t) |
| end if |
| end if |
| else |
| Set_PWM_handware(18, 12000, 50000) |
| end if |
| else |
| Uart_rec_flag = 0 |
| end if |
| end if |
| end while |
4.2.4. Channel Detection
| Algorithm 3 An CSMA/CA channel detection process |
| While (1) do |
| Data_rev = ser_read(ser.in Waiting())) |
| if Data_rev.find(“99”) = = −1 then |
| threadLock.acquire() |
| Uart_rec_flag = 0 |
| threadLock.release() |
| Data_rev = = 0 |
| while(1) |
| else |
| threadLock.acquire() |
| Uart_rec_flag = 1 |
| threadLock.release() |
| B = Data_rev.index(“99”) |
| if Data_rev[B + 2] = = Local I D then |
| Position = Data_rev[B + 4 : B + 13] |
| else |
| Data_rev = = 0 |
| end if |
| end if |
| end while |
4.3. Underwater Electric Field Dynamic Multi-Node Communication System Water Tank Experiment Verification
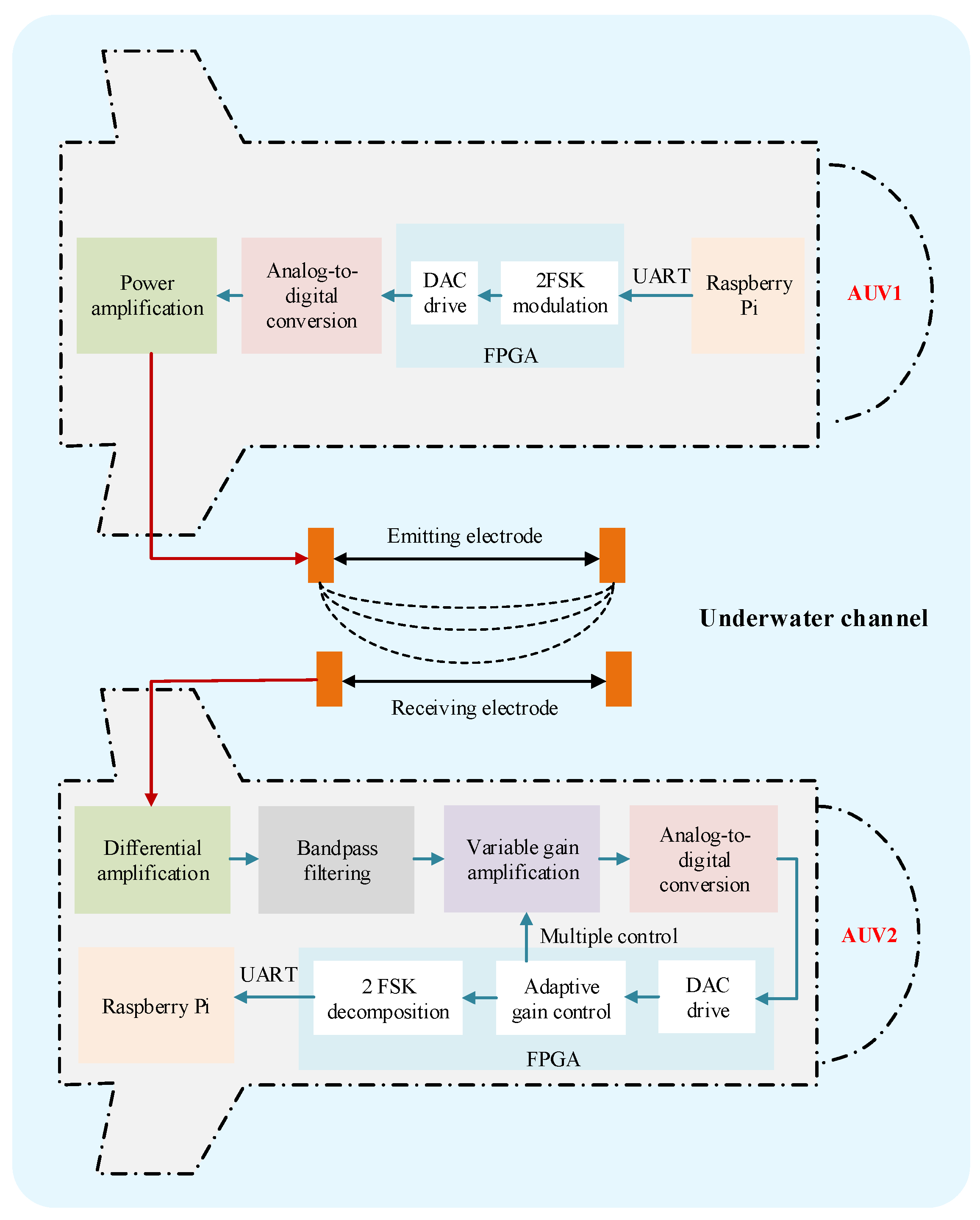
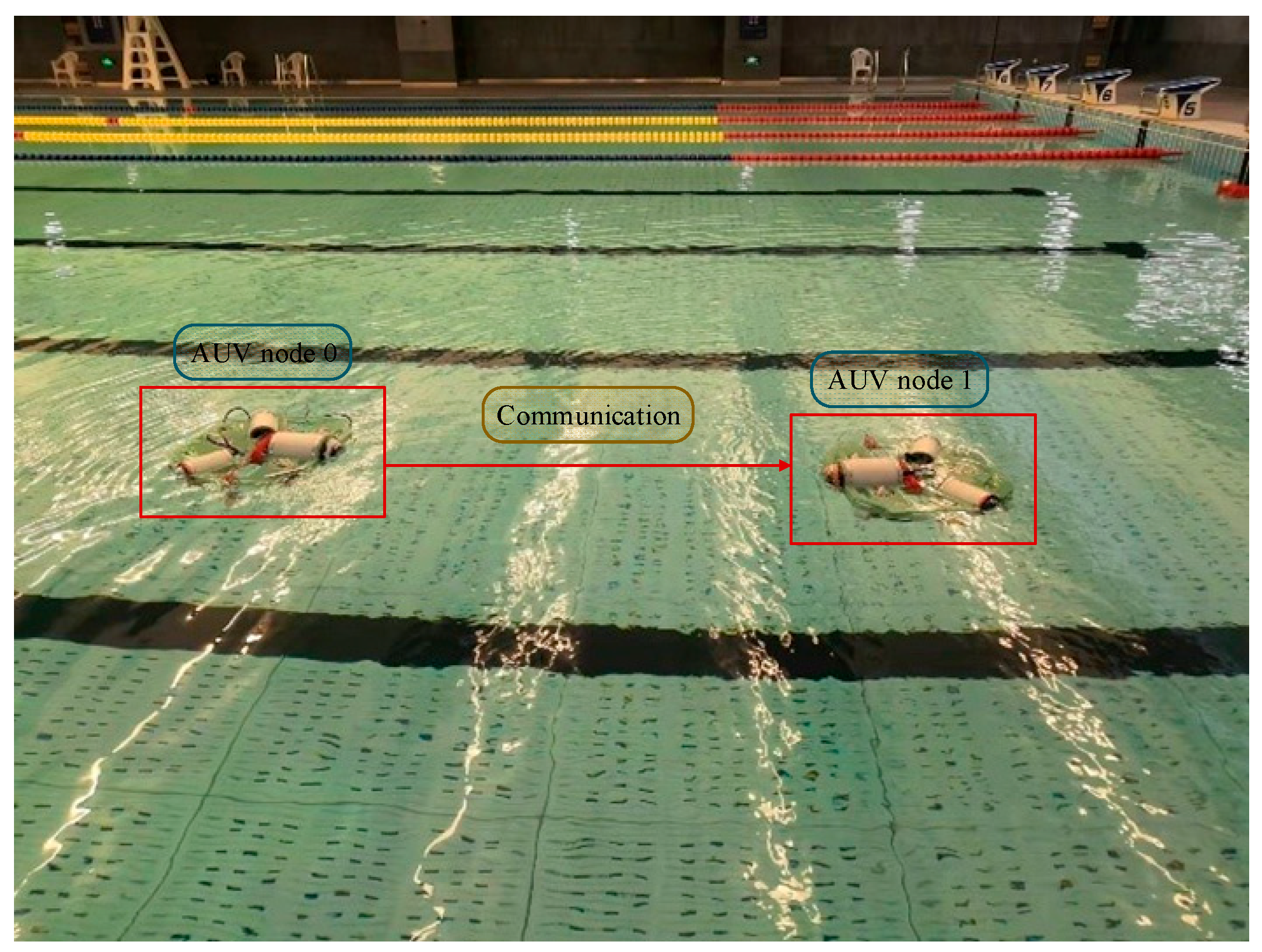
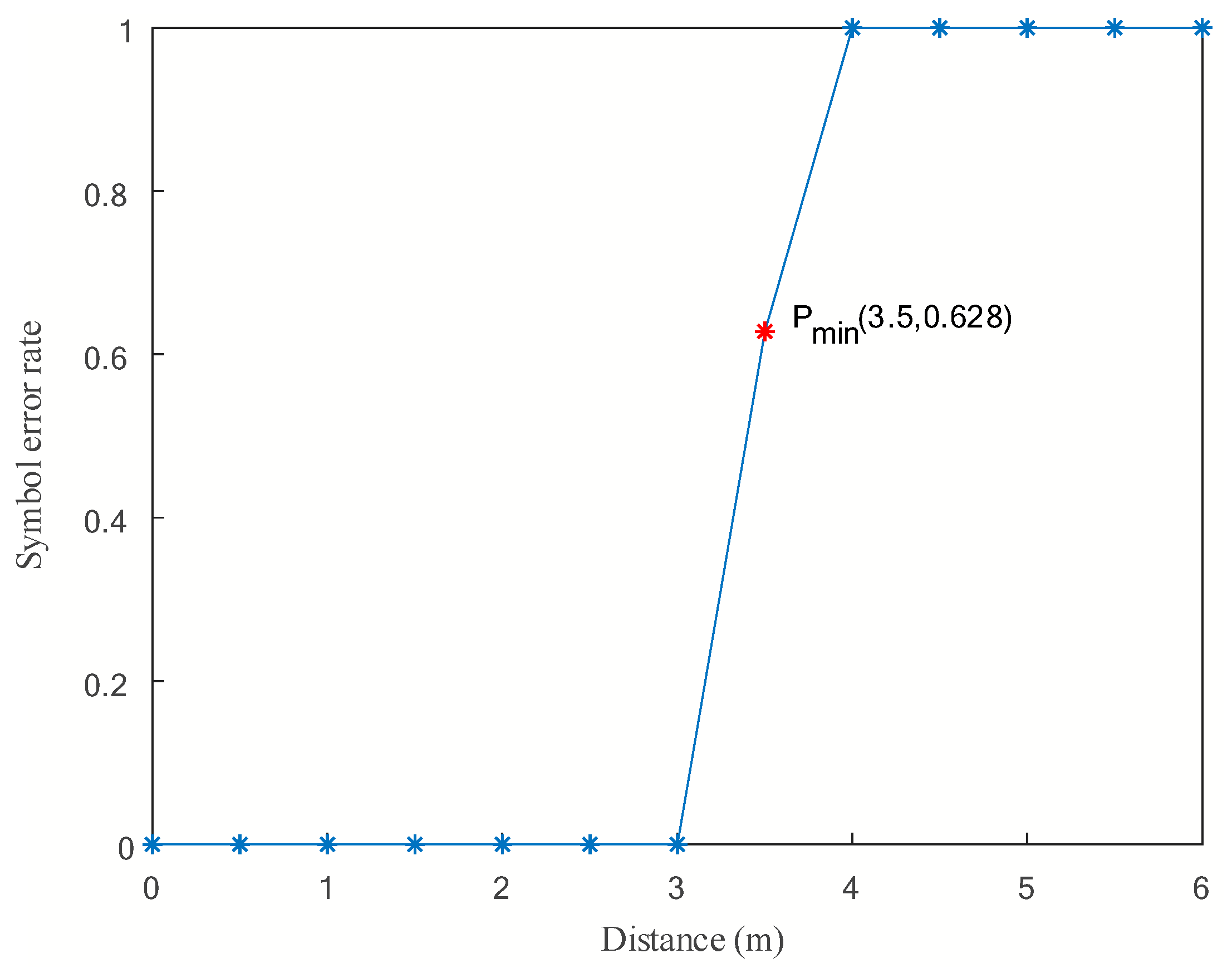
4.3.1. Experimental Validation of Underwater Electric Field Mobile Communication Based on AUV
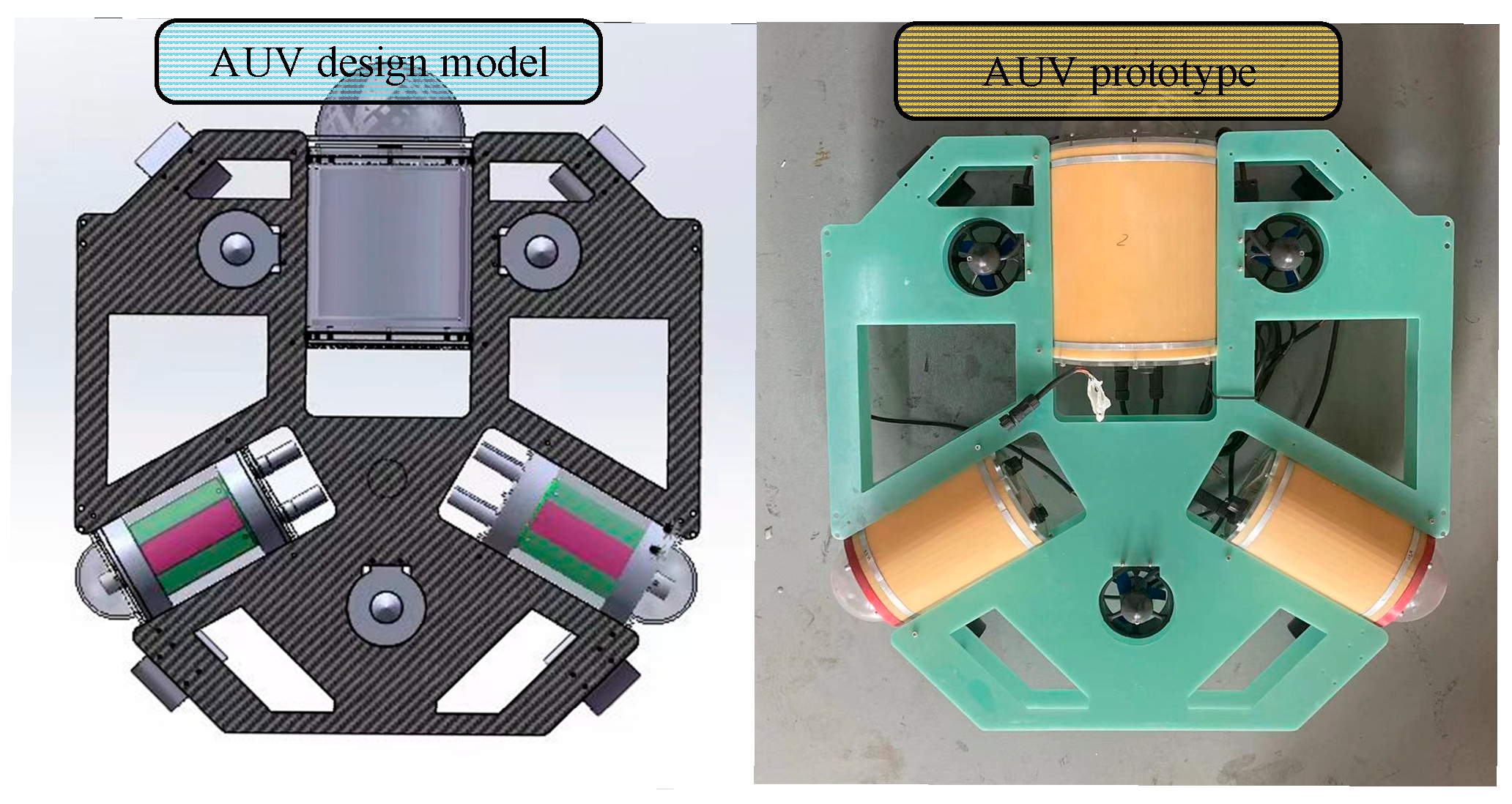
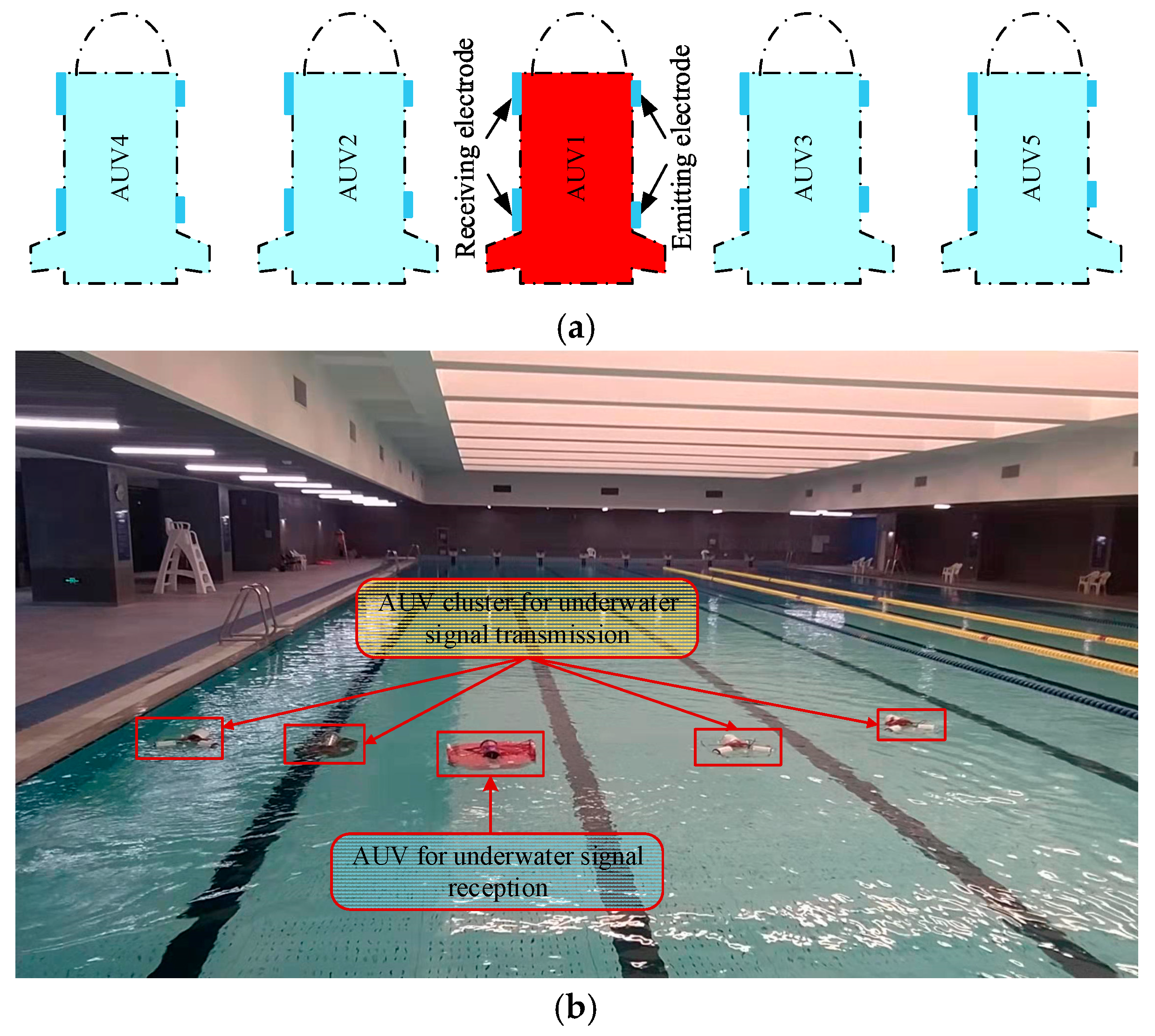
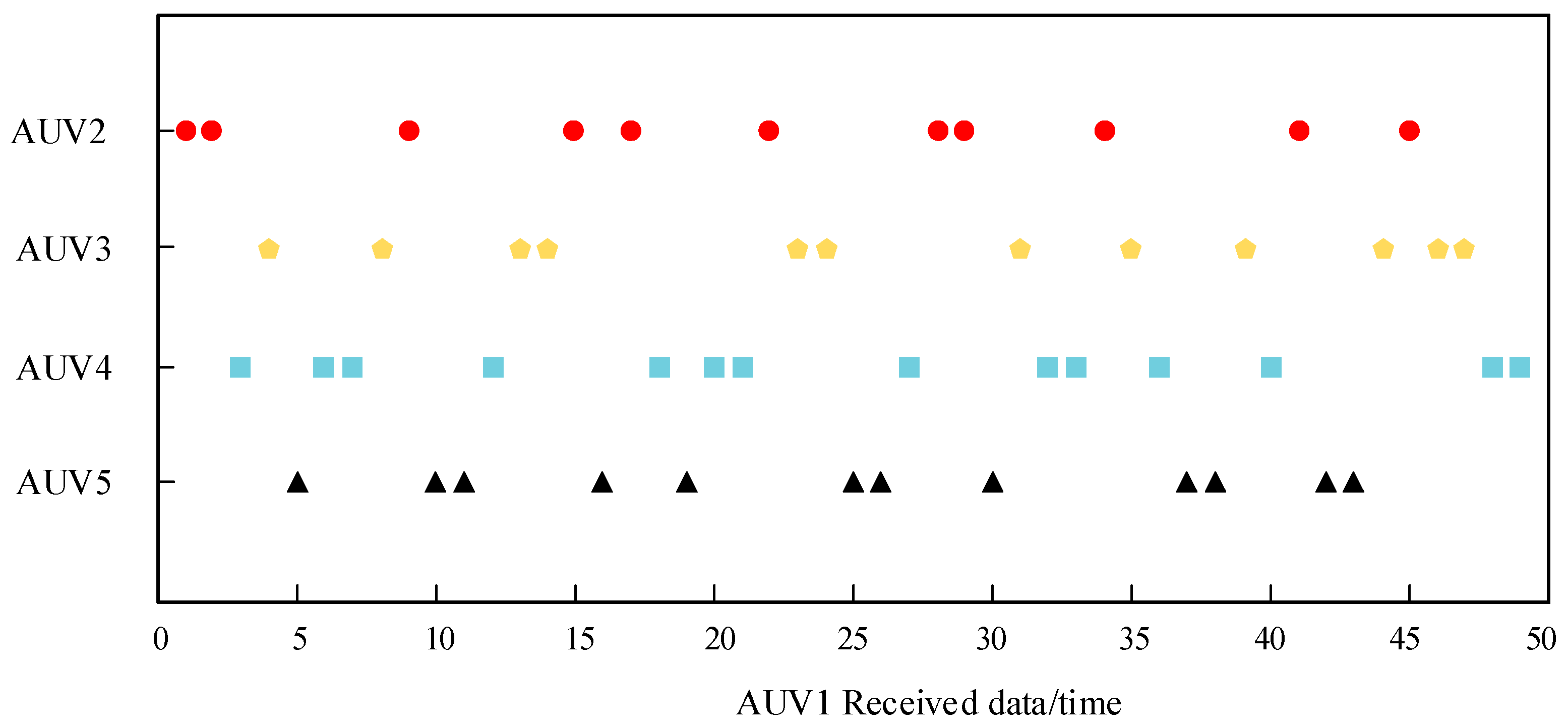
4.3.2. Experimental Verification of Underwater Electric Field Multi-Node Networking Communication Based on AUV
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Vemuri, S.; Mirkar, S. A performance comparison of MANET routing protocols. In Proceedings of the 2021 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 27–29 November 2021; pp. 1–5. [Google Scholar]
- Shaban, A.M.; Kurnaz, S.; Shantaf, A.M. Evaluation DSDV, AODV and OLSR routing protocols in real live by using SUMO with NS3 simulation in VANET. In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Istanbul, Turkey, 26–27 June 2020; pp. 1–5. [Google Scholar]
- Kartheeban, K.; Hemalatha, J.; Priya, C.; Venkatesulu, M. Secure Multicast Group Communications for IoT Applications using WSN. In Proceedings of the 2020 Third International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 August 2020; pp. 242–248. [Google Scholar]
- Sahu, B.; Parida, P.; Parida, A.K.; Mishra, S.K. Token based data security in inter cluster communication in wireless sensor network. In Proceedings of the 2020 International Conference on Computer Science, Engineering and Applications (ICCSEA), Kiev, Ukraine, 21–21 January 2020; pp. 1–6. [Google Scholar]
- Sharma, N.; Sharma, D.P.; Sharma, M. Wormhole Formation and Simulation in Dynamic Source Routing Protocol using NS3. In Proceedings of the 2020 9th International Conference System Modeling and Advancement in Research Trends (SMART), Moradabad, India, 4–5 December 2020; pp. 318–322. [Google Scholar]
- Chang, X. Research And Simulation of AD HOC Network Routing Protocols Based on NS3. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2010. [Google Scholar]
- Han, D.; Du, X.; Zhu, J. Modification Analysis of RCHF MAC Protocol Optimization based on NS3. Commun. Technol. 2019, 52, 885–889. [Google Scholar]
- Mao, S. Dynamic Backoff Underwater Acoustic Network Mac Protocol Based on Handshake Mechanism. Ph.D. Thesis, South China University of Technology, Guangzhou, China, 2019. [Google Scholar]
- Wang, J. Research on Detection-Based Power Control Routing Protocol in Underwater Acoustic Sensor Network. Ph.D. Thesis, South China University of Technology, Guangzhou, China, 2019. [Google Scholar]
- Bianchi, G.; Fratta, L.; Oliveri, M. Performance evaluation and enhancement of the CSMA/CA MAC protocol for 802.11 wireless LANs. In Proceedings of the PIMRC’96-7th International Symposium on Personal, Indoor, and Mobile Communications, Taipei, Taiwan, 18 October 1996; Volume 2, pp. 392–396. [Google Scholar]
- Alvarez, L.B.; Montejo-Sánchez, S.; Jara, N.; Rodríguez-López, L.; Saavedra, G. CSMA/CA protocol design in hybrid network of Visible Light Communication and RF Femtocell systems. Opt. Commun. 2023, 537, 129434. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, W.; Xie, G. Underwater Electrocommunication Protocol Design for Underwater Robot. J. Unmanned Undersea Syst. 2019, 27, 134–141. [Google Scholar]
- Cicioğlu, M.; Çalhan, A. Performance analysis of cross-layer design for internet of underwater things. IEEE Sens. J. 2022, 22, 15429–15434. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Tai, Y.; Zhang, R. Development and the State of the Art in Underwater Acoustic Communication. J. Signal Process. 2019, 35, 1441–1449. [Google Scholar] [CrossRef]
- Donati, E.; Worm, M.; Mintchev, S.; Van Der Wiel, M.; Benelli, G.; Von Der Emde, G.; Stefanini, C. Investigation of collective behaviour and electrocommunication in the weakly electric fish, Mormyrus rume, through a biomimetic robotic dummy fish. Bioinspir. Biomim. 2016, 11, 066009. [Google Scholar] [CrossRef] [PubMed]
- Neveln, I.D.; Bai, Y.; Snyder, J.B.; Solberg, J.R.; Curet, O.M.; Lynch, K.M.; MacIver, M.A. Biomimetic and bio-inspired robotics in electric fish research. J. Exp. Biol. 2013, 216, 2501–2514. [Google Scholar] [CrossRef] [PubMed]
- Blouin, S.; Lucas, C. Early Results and Description of an Underwater Electric-field Sensing and Communication Experiment in Bedford Basin. In Proceedings of the Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 18–20 September 2022; pp. 28–32. [Google Scholar]
- Tucker, M.J. Conduction signalling in the sea. Radio Electron. Eng. 1972, 42, 453–456. [Google Scholar] [CrossRef]
- Momma, H.; Tsuchiya, T. Underwater Communication by Electric Current. In Proceedings of the OCEANS ’76, Washington, DC, USA, 13–15 September 1976. [Google Scholar]
- Zhou, Y.; Wang, W.; Zhang, H.; Wang, C.; Xu, G.; Xie, G. Communication distance correlates positively with electrode distance in underwater electrocommunication. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 88–93. [Google Scholar]
- Wang, Q.; Liu, R.; Wang, W.; Xie, G. An electrocommunication system using FSK modulation and deep learning based demodulation for underwater robots. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1699–1704. [Google Scholar]
- Feng, X.; Zhao, Z.; Zhang, Y.; Hu, Q. Integrated Underwater Detection and Communication System Based on P4 Code-Modulated OFDM Signal. J. Mar. Sci. Eng. 2023, 11, 920. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, Y.; Feng, X.; Jiang, C.; Su, W.; Hu, Q. A dynamic velocity potential field method for multi-AUV cooperative hunting tasks. Ocean Eng. 2024, 295, 116813. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, B. Research on New Network Simulator NS3. Comput. Technol. Dev. 2009, 19, 80–84. [Google Scholar]
- Riley, G.F.; Henderson, T.R. The NS3 network simulator. In Modeling and Tools for Network Simulation; Springer: Berlin/Heidelberg, Germany, 2010; pp. 15–34. [Google Scholar]
- Campanile, L.; Gribaudo, M.; Iacono, M.; Marulli, F.; Mastroianni, M. Computer network simulation with NS3: A systematic literature review. Electronics 2020, 9, 272. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- To, T.H.; Duda, A. Simulation of LoRa in NS3: Improving LoRa performance with CSMA. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–7. [Google Scholar]
- Benin, J.; Nowatkowski, M.; Owen, H. Vehicular network simulation propagation loss model parameter standardization in NS3 and beyond. In Proceedings of the 2012 IEEE Southeastcon, Orlando, FL, USA, 15–18 March 2012; pp. 1–5. [Google Scholar]
- Stoffers, M.; Riley, G. Comparing the NS3 propagation models. In Proceedings of the 2012 IEEE 20th International Symposium on Modeling, Analysis and Simulation of Computer and Telecommunication Systems, Washington, DC, USA, 7–9 August 2012; pp. 61–67. [Google Scholar]
- Sharma, N.; Chakrawarti, R.K. Simulation for congestion-less losses control over MANET using TCP scheme. In Proceedings of the 2014 International Conference on Issues and Challenges in Intelligent Computing Techniques (ICICT), Ghaziabad, India, 7–8 February 2014; pp. 410–415. [Google Scholar]
- Casoni, M.; Patriciello, N. Next-generation TCP for NS3 simulator. Simul. Model. Pract. Theory 2016, 66, 81–93. [Google Scholar] [CrossRef]
- Alvi, A.N.; Bouk, S.H.; Ahmed, S.H.; Yaqub, M.A. Influence of backoff period in slotted CSMA/CA of IEEE 802.15. 4. In Proceedings of the Wired/Wireless Internet Communications: 14th IFIP WG 6.2 International Conference, WWIC 2016, Thessaloniki, Greece, 25–27 May 2016; Proceedings 14. Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 40–51. [Google Scholar]
- Pang, W. Design of Software Defined Radio Platform Based on Raspberry Pi. Ph.D. Thesis, Lanzhou University, Lanzhou, China, 2021. [Google Scholar]
- Zhang, Y.; Zhao, Z.; Feng, X.; Zhao, T.; Hu, Q. Implementation of Underwater Electric Field Communication Based on Direct Sequence Spread Spectrum (DSSS) and Binary Phase Shift Keying (BPSK) Modulation. Biomimetics 2024, 9, 103. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Feng, X.; Jiang, C.; Zhang, Y.; Su, W.; Hu, Q. Distributed short-term predictive control for AUV clusters in underwater cooperative hunting tasks. Ocean Eng. 2024, 301, 117343. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Simulation environment | NS-3.31 (version3.31) |
| Operating system | GNU/Linux (Ubuntu18.04.4) |
| Simulation region | |
| Conductivity | |
| Permeability | |
| Communication frequency | |
| Transmission speed | |
| Number of nodes | |
| Propagation loss model | LogDistancePropagationLossModel |
| Propagation delay model | ConstantSpeedPropagationDelayModel |
| CCAModeThreshold | |
| Transmitting power | |
| Channel | CSMA/CA |
| Transport protocol | OLSR, AODV |
| Simulation time | |
| Transmission rate |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Zhang, Y.; Gao, A.; Hu, Q. Research on AUV Multi-Node Networking Communication Based on Underwater Electric Field CSMA/CA Channel. Biomimetics 2024, 9, 653. https://doi.org/10.3390/biomimetics9110653
Feng X, Zhang Y, Gao A, Hu Q. Research on AUV Multi-Node Networking Communication Based on Underwater Electric Field CSMA/CA Channel. Biomimetics. 2024; 9(11):653. https://doi.org/10.3390/biomimetics9110653
Chicago/Turabian StyleFeng, Xinglong, Yuzhong Zhang, Ang Gao, and Qiao Hu. 2024. "Research on AUV Multi-Node Networking Communication Based on Underwater Electric Field CSMA/CA Channel" Biomimetics 9, no. 11: 653. https://doi.org/10.3390/biomimetics9110653
APA StyleFeng, X., Zhang, Y., Gao, A., & Hu, Q. (2024). Research on AUV Multi-Node Networking Communication Based on Underwater Electric Field CSMA/CA Channel. Biomimetics, 9(11), 653. https://doi.org/10.3390/biomimetics9110653