


Teleoperated Grasping Using Data Gloves Based on Fuzzy Logic Controller



Abstract
:1. Introduction
- We propose a teleoperation method using data gloves and normalize the flex sensor data to identify human manipulation intentions.
- To achieve control of teleoperation, a fuzzy logic controller is designed. The control commands for the joint velocity of the robot arm are obtained through fuzzy logic rules based on finger flexion information.
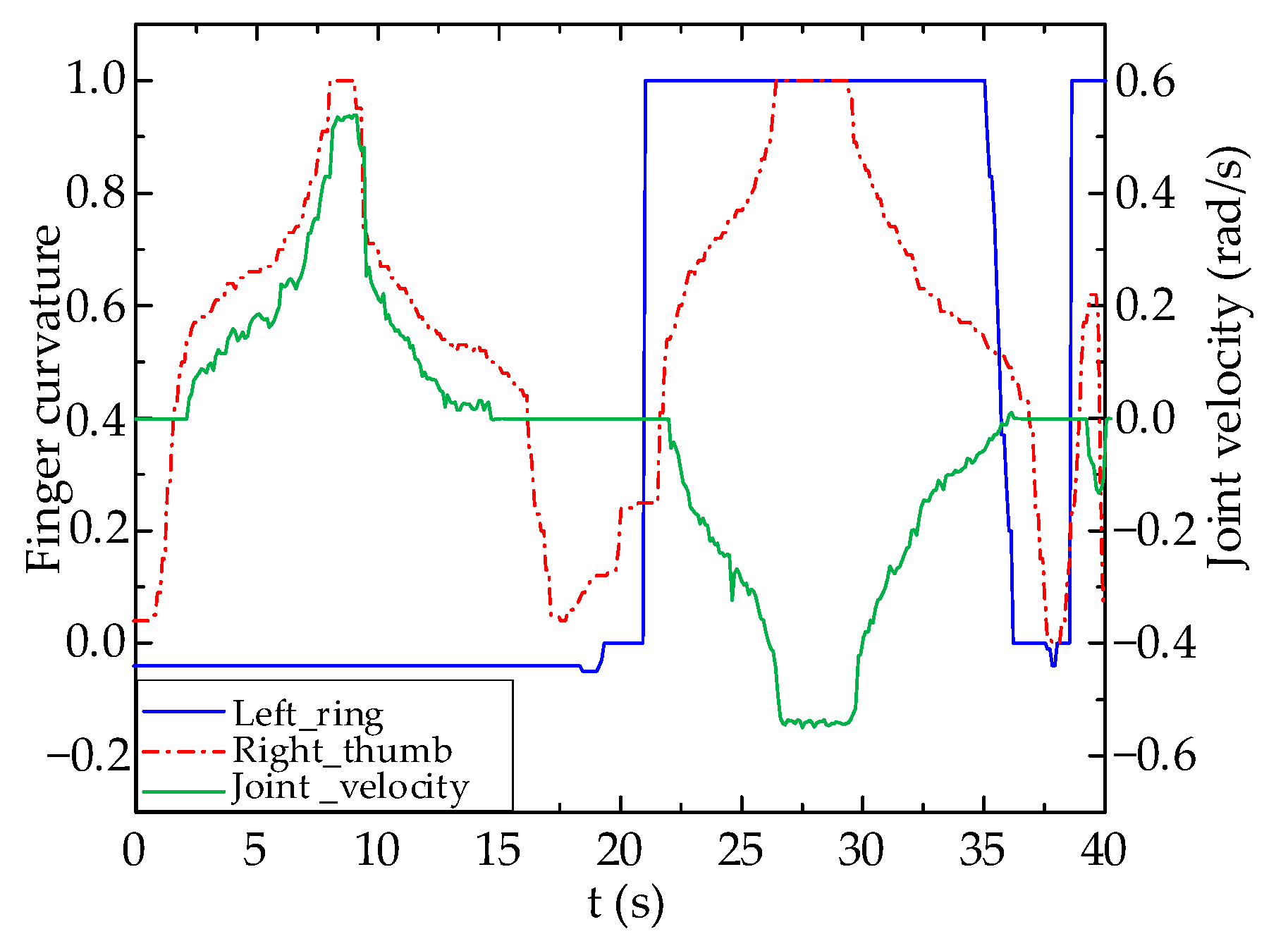
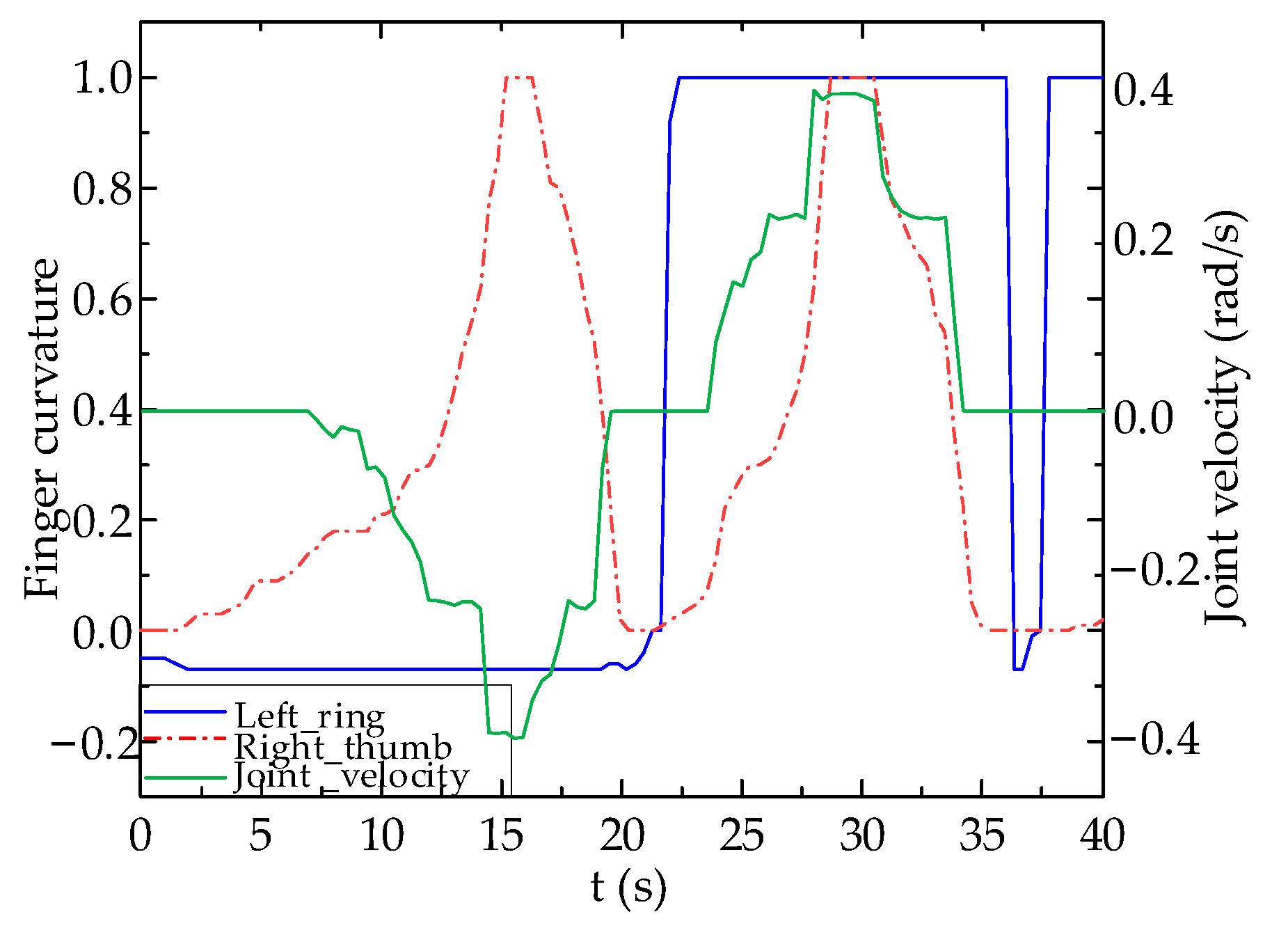
- The experimental results indicated that compared to the joint velocity output of the PID controller, the ability of the data gloves to use a fuzzy logic algorithm has better non-linearity and enhances the stability of teleoperated robot arm control.
2. Method
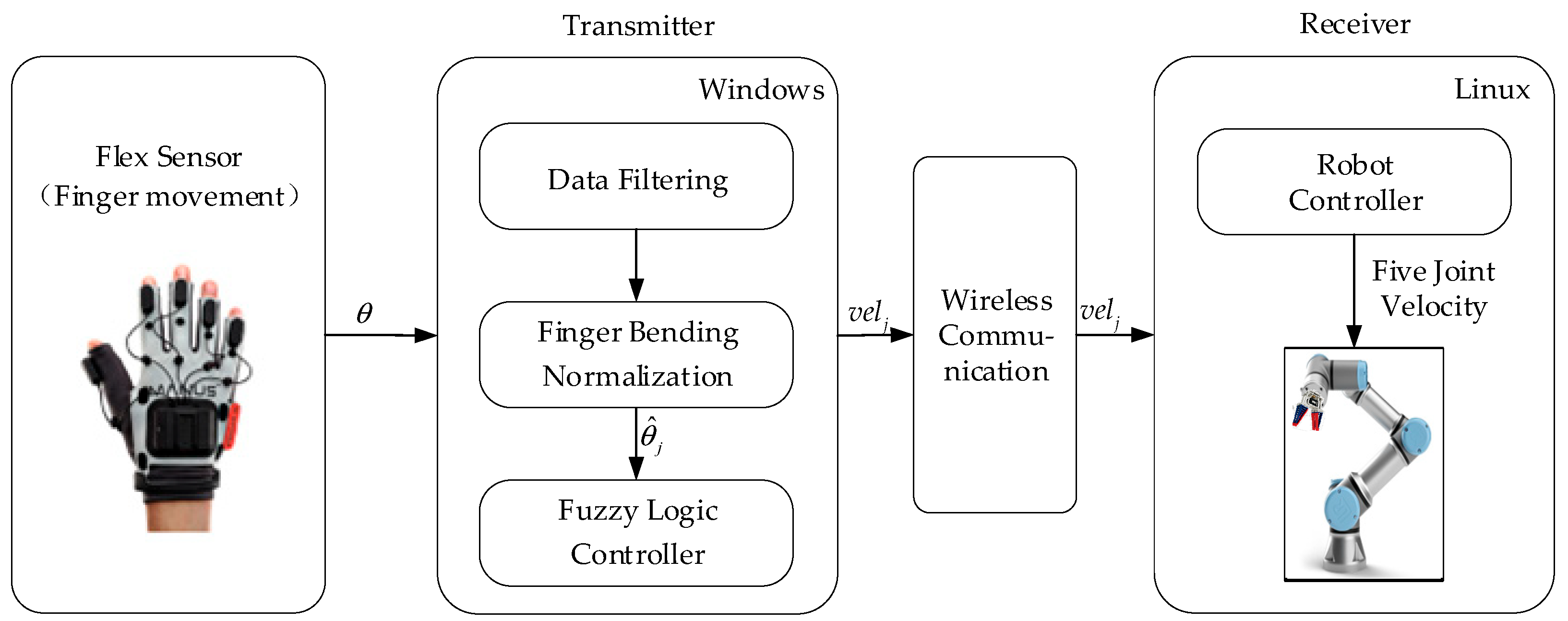
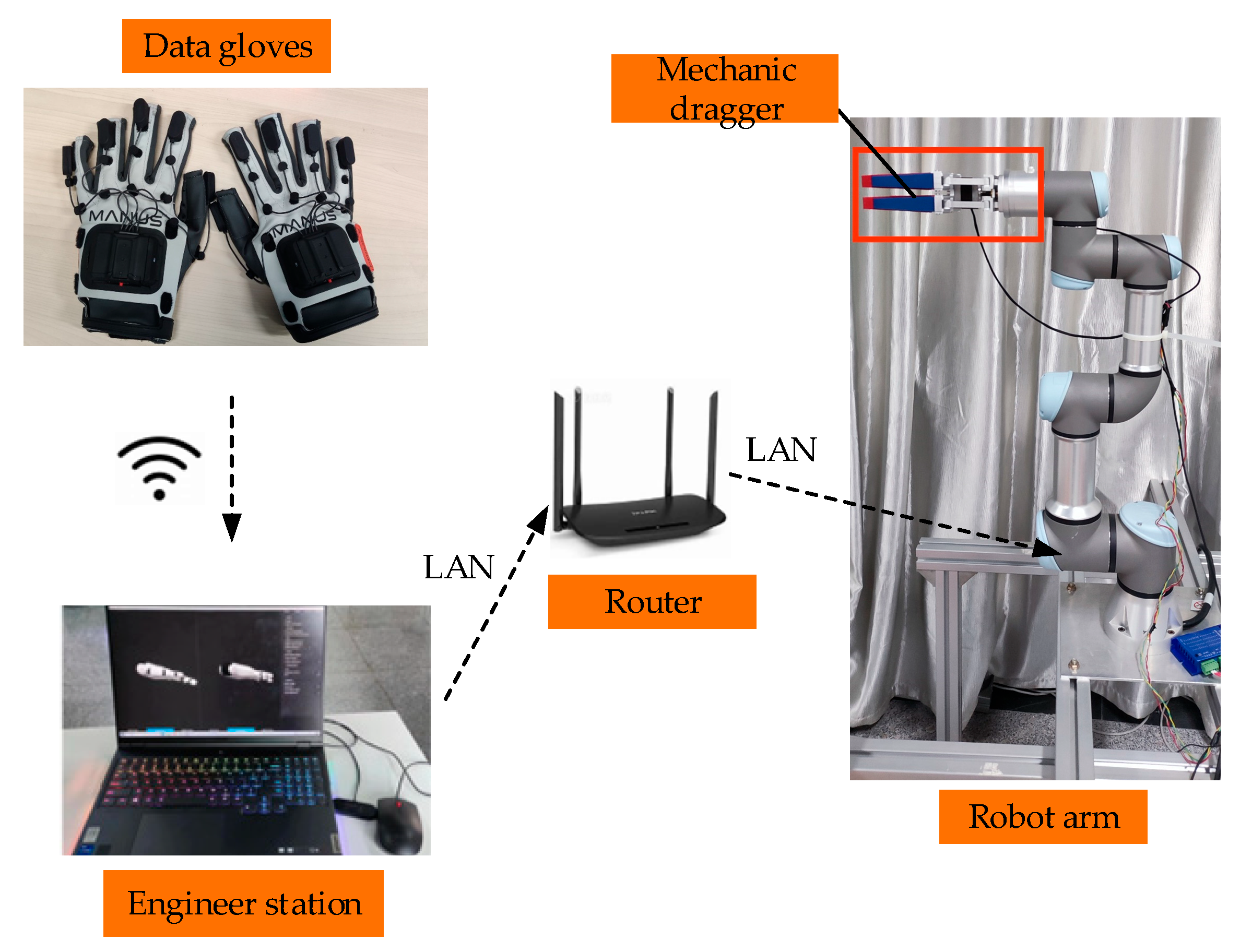
2.1. System Overview
2.2. The Data Glove
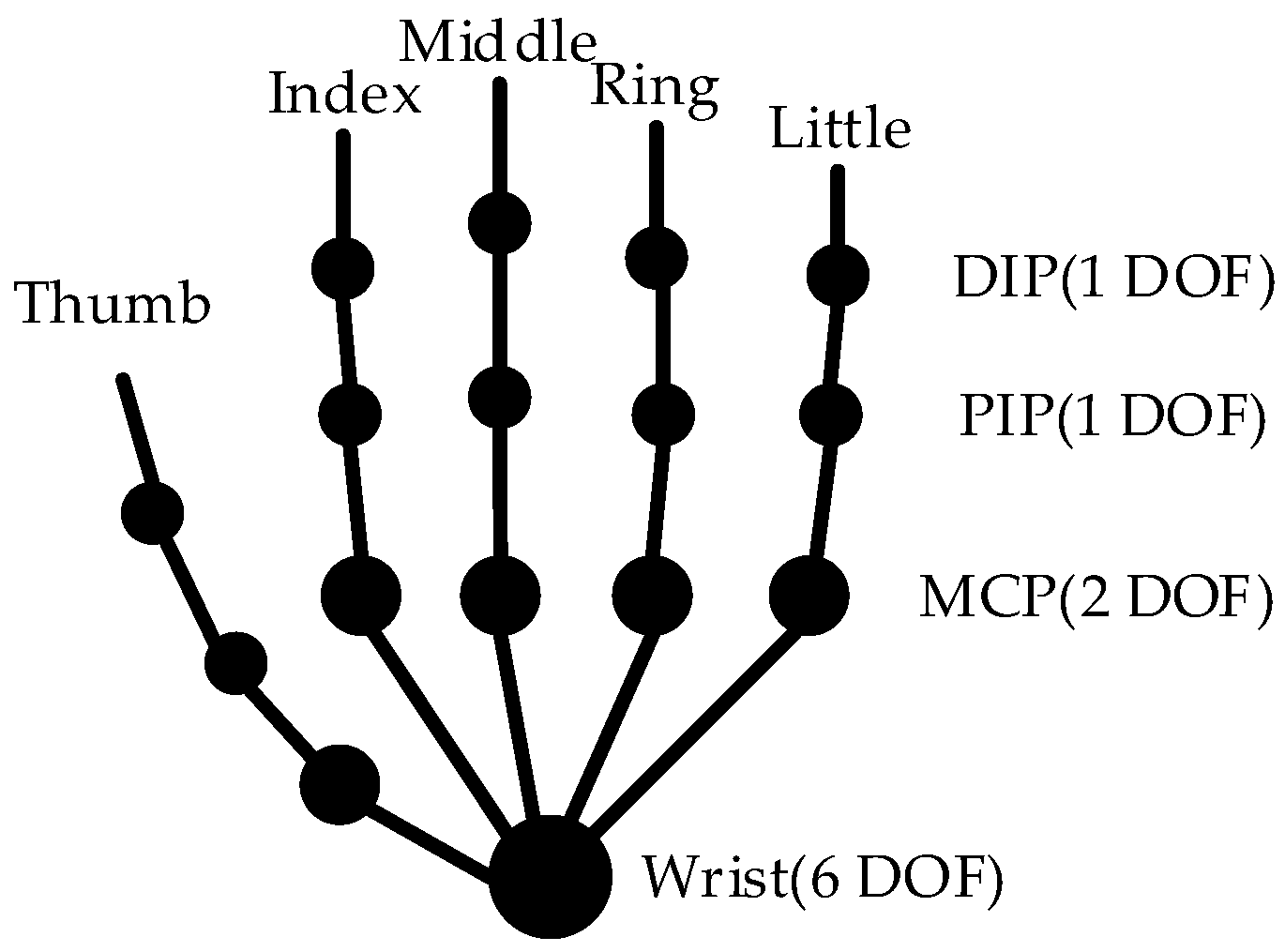
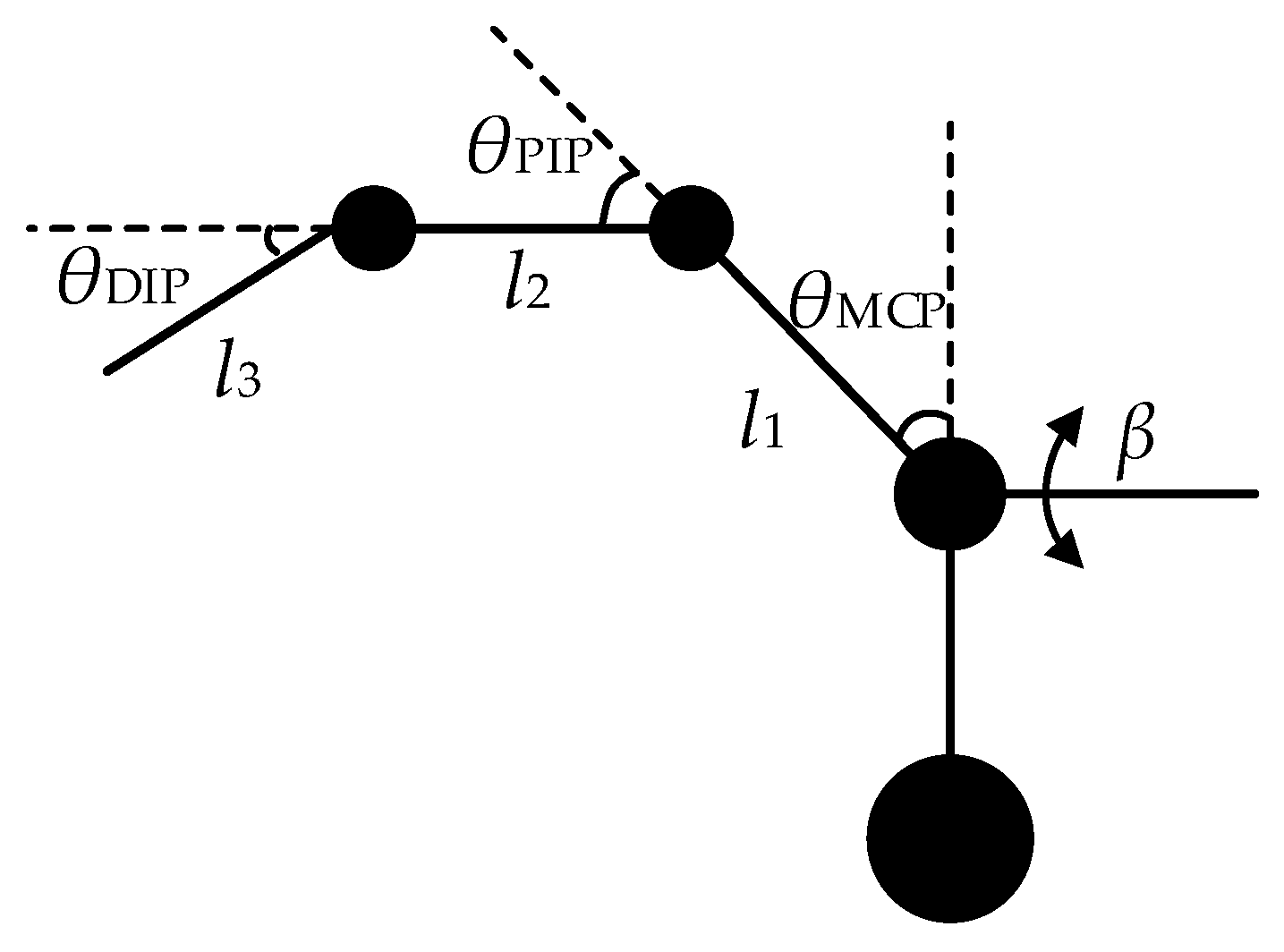
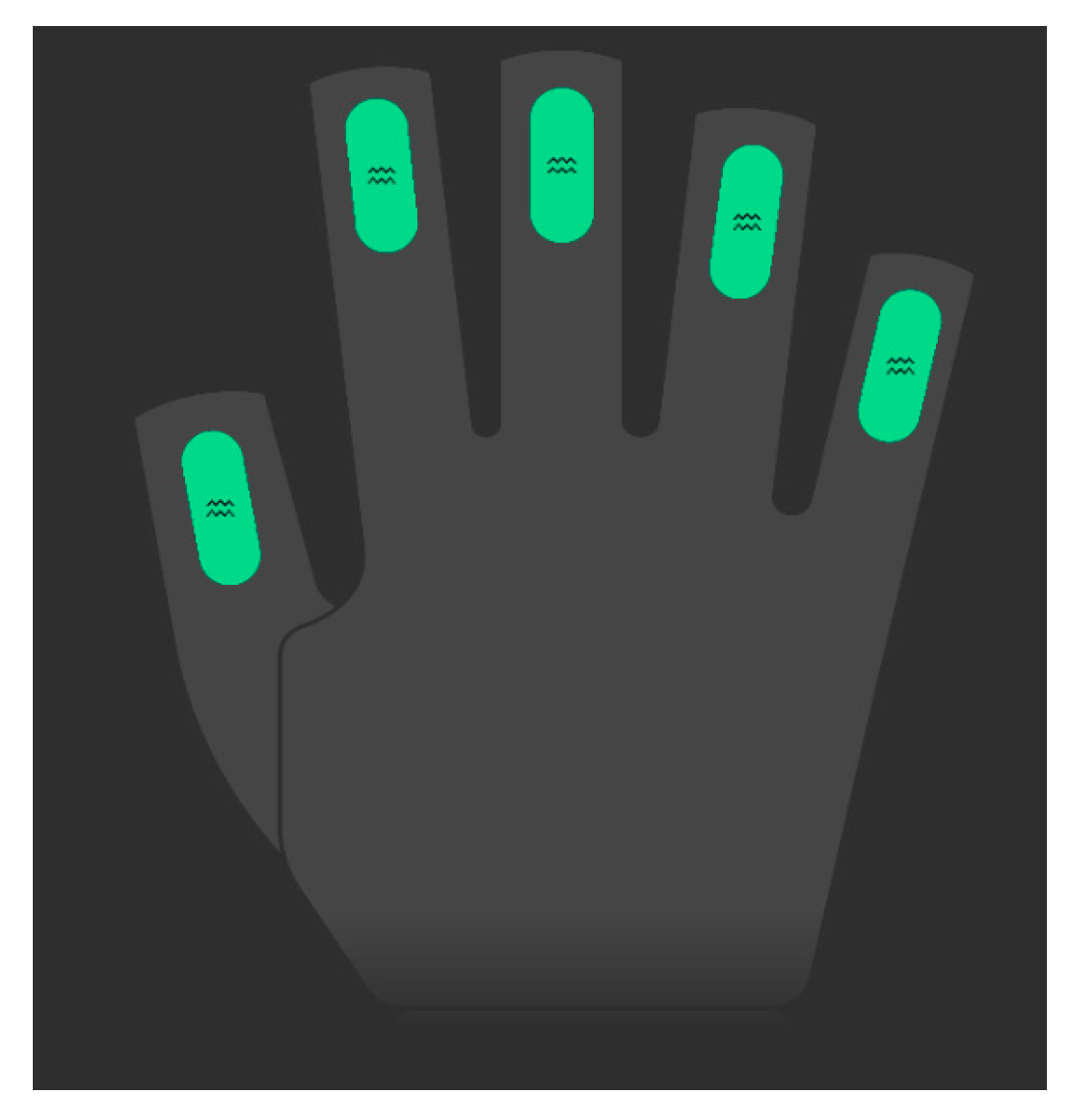
2.2.1. Hand Modeling
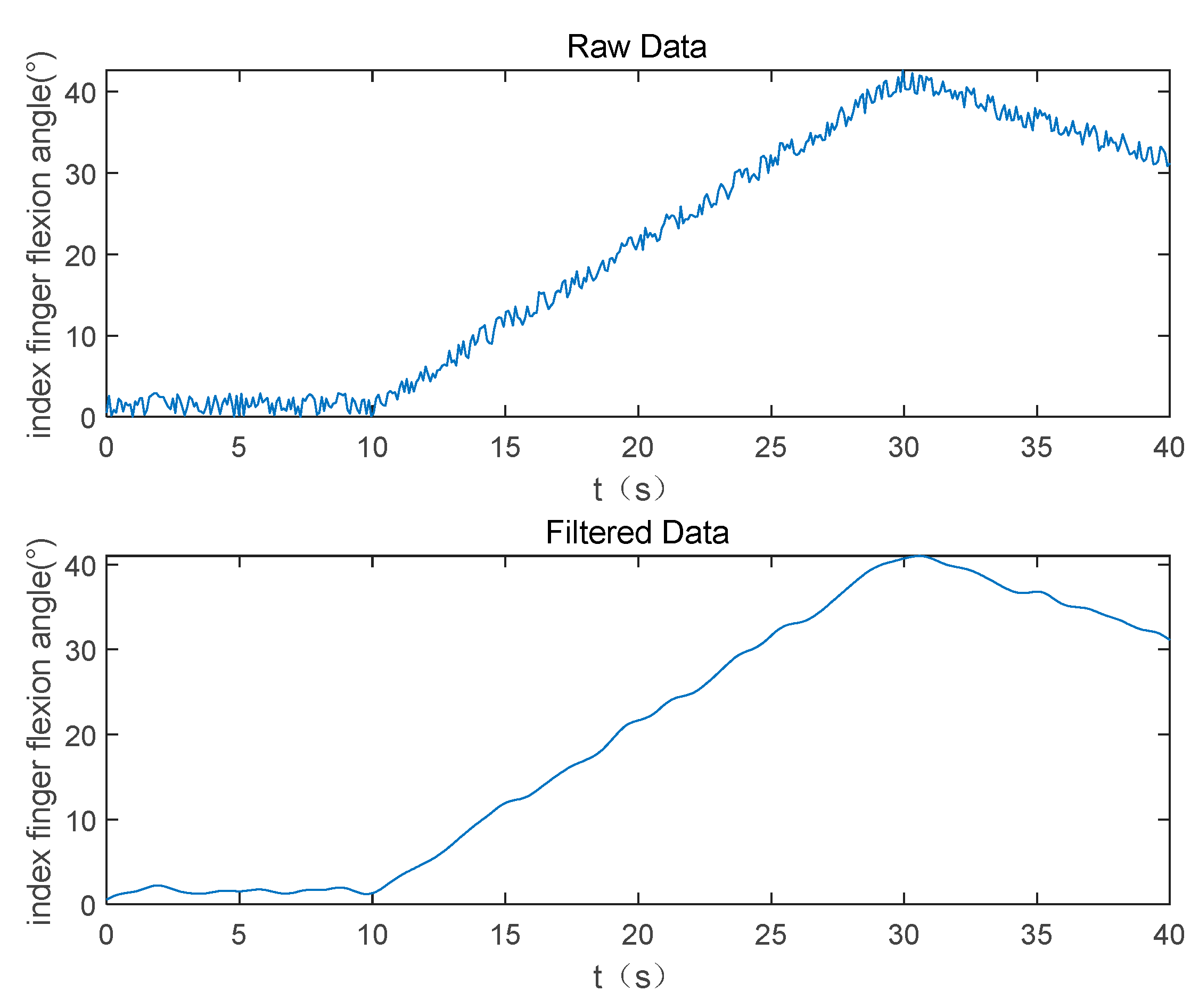
2.2.2. Data Filtering
2.2.3. Normalization
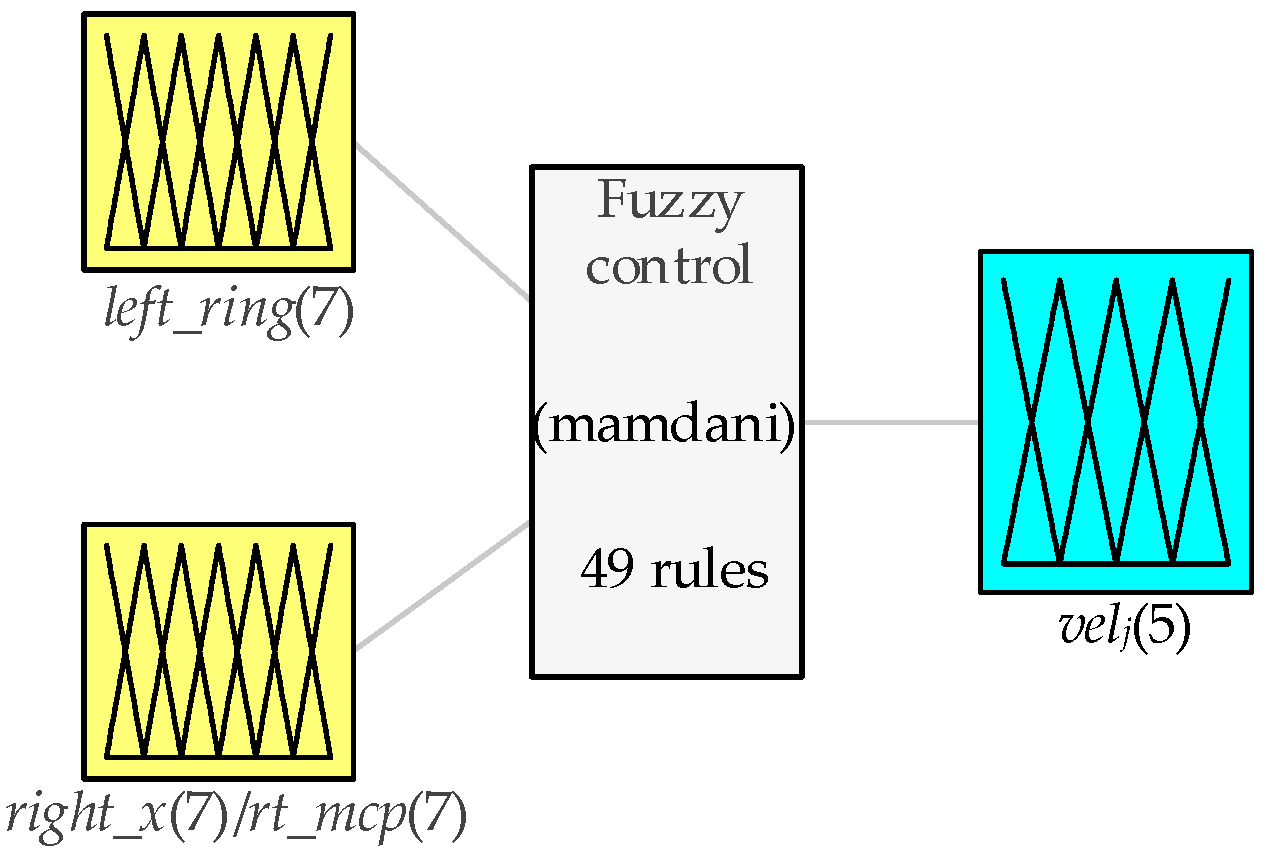
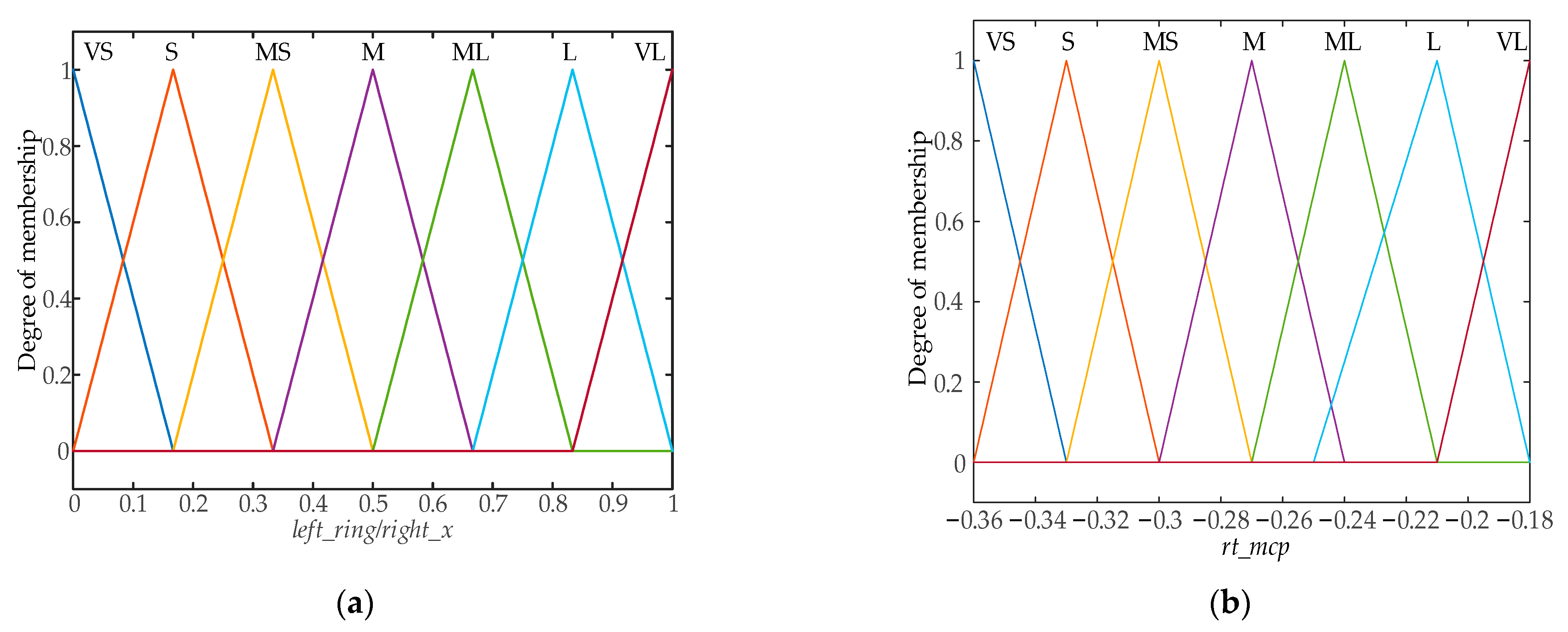
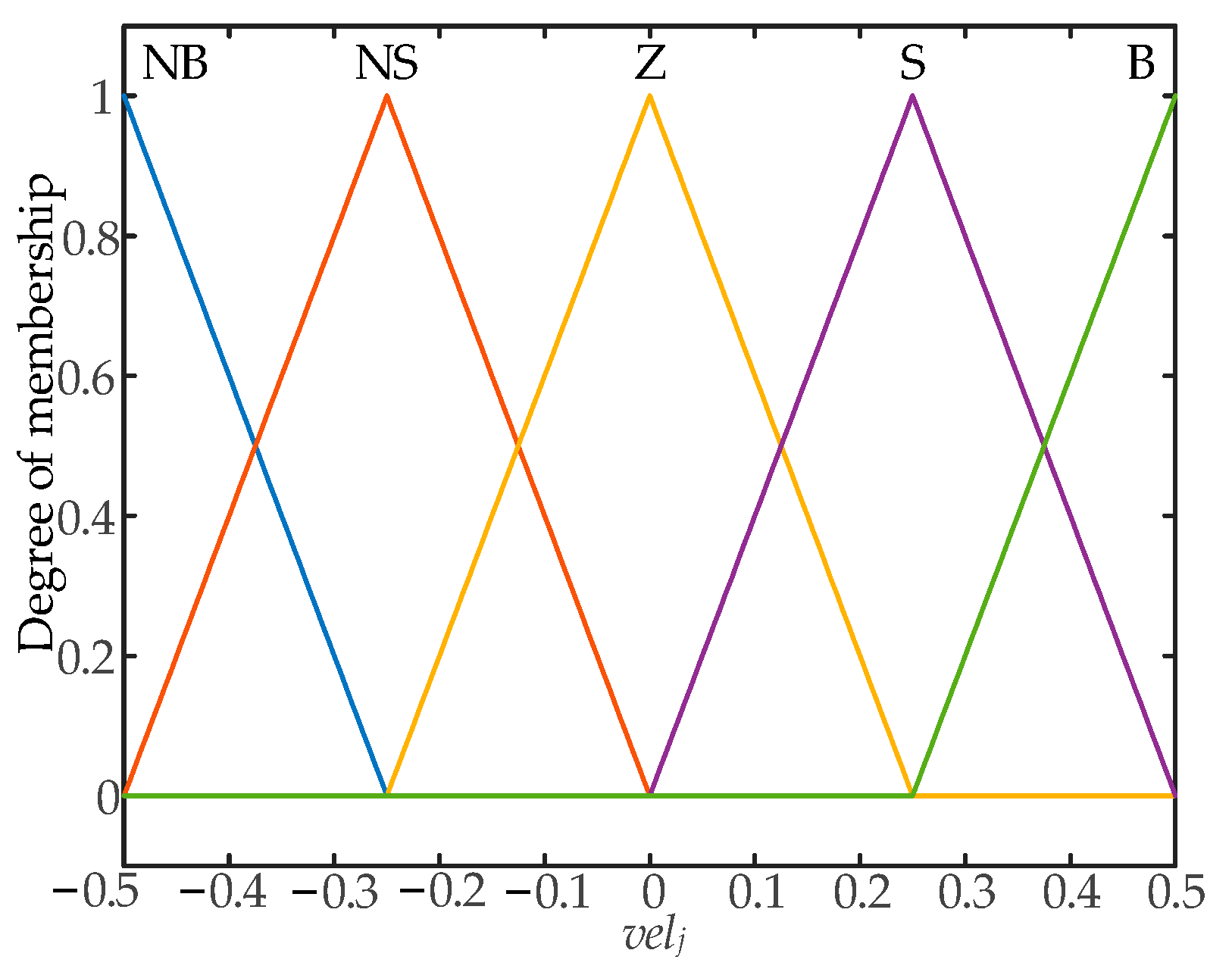
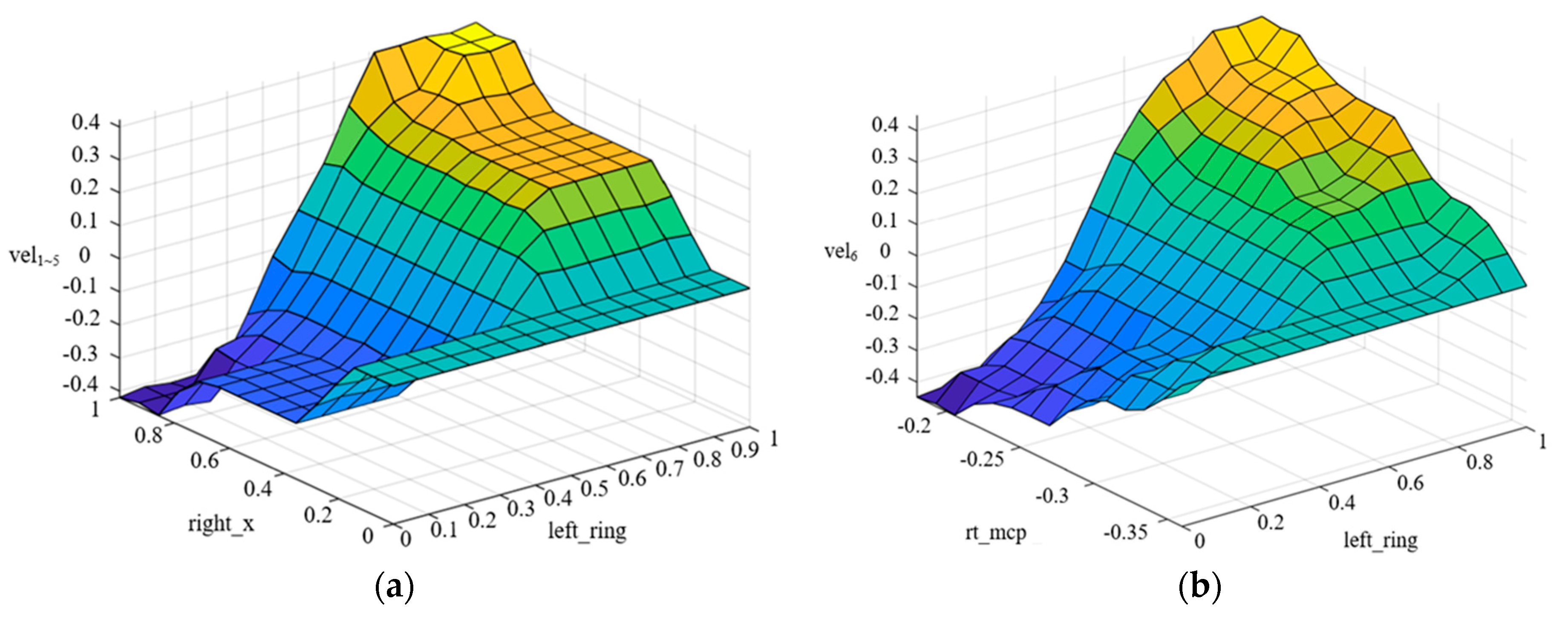
2.3. Fuzzy Logic Controller
3. Experiments
3.1. Experimental Setup
3.2. Fuzzy Logic Control Testing
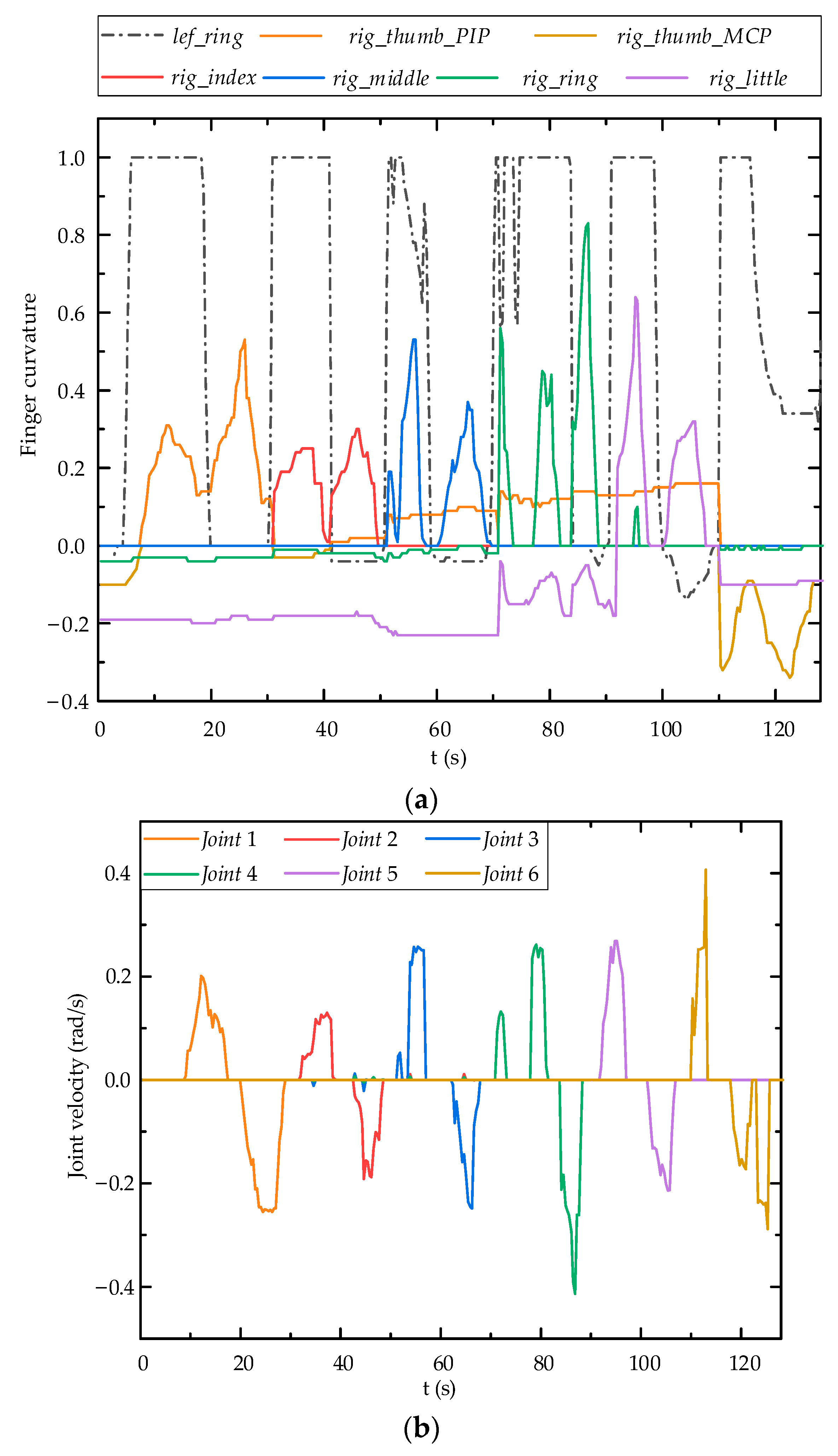
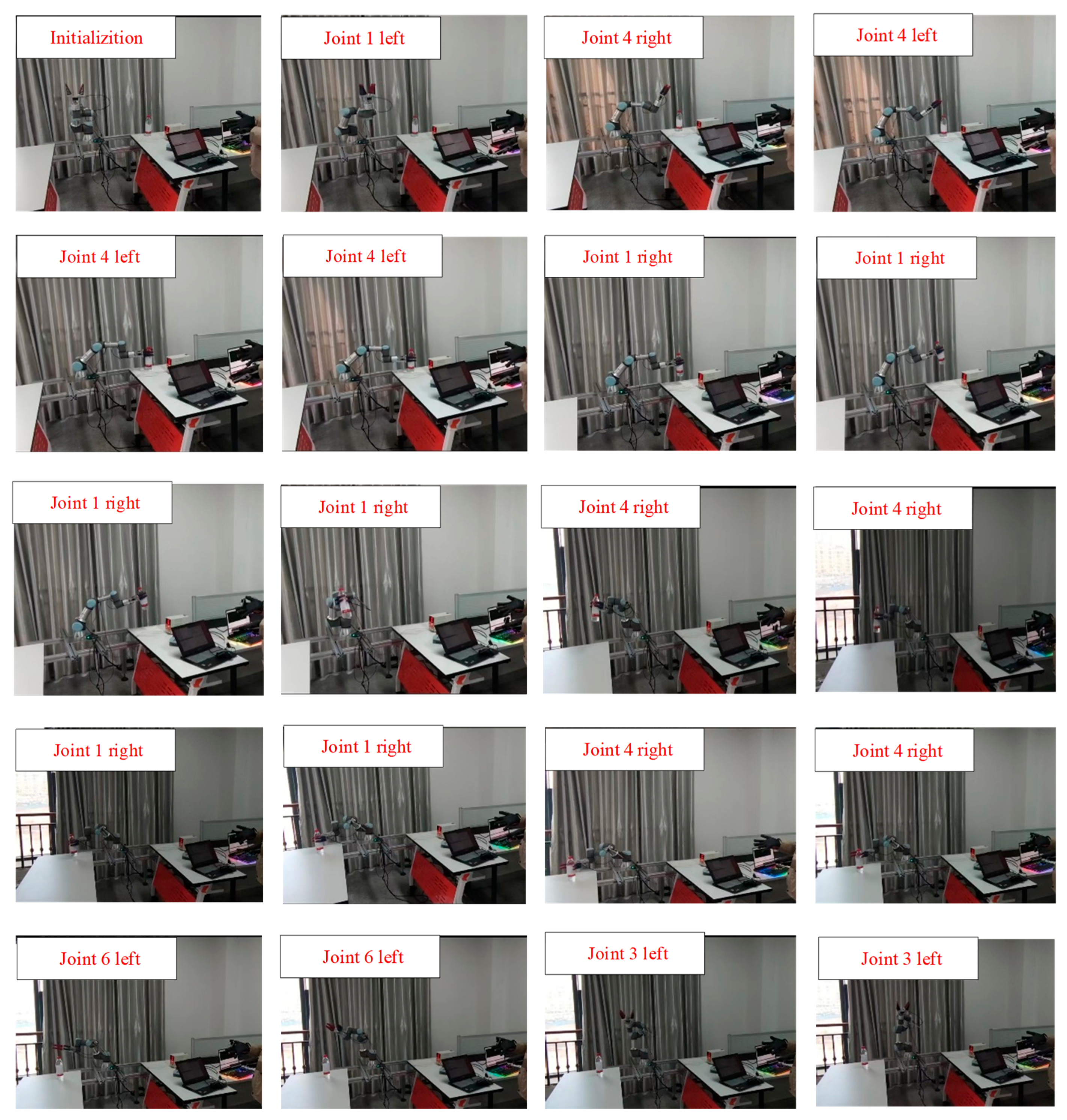
3.3. Teleoperated Grasping Testing
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Batty, T.; Ehrampoosh, A.; Shirinzadeh, B.; Zhong, Y.; Smith, J. A Transparent Teleoperated Robotic Surgical System with Predictive Haptic Feedback and Force Modelling. Sensors 2022, 22, 9770. [Google Scholar] [CrossRef] [PubMed]
- Doisy, G.; Ronen, A.; Edan, Y. Comparison of Three Different Techniques for Camera and Motion Control of a Teleoperated Robot. Appl. Ergon. 2017, 58, 527–534. [Google Scholar] [CrossRef]
- Shiroma, N.; Miyauchi, R.; Matsuno, F. Mobile Robot Teleoperation through Virtual Robot. In Proceedings of the RO-MAN 2008-The 17th IEEE International Symposium on Robot and Human Interactive Communication, Munich, Germany, 1–3 August 2008; IEEE: New York, NY, USA, 2008; pp. 477–482. [Google Scholar]
- Zou, R.; Liu, Y.; Li, Y.; Chu, G.; Zhao, J.; Cai, H. A Novel Human Intention Prediction Approach Based on Fuzzy Rules through Wearable Sensing in Human–Robot Handover. Biomimetics 2023, 8, 358. [Google Scholar] [CrossRef] [PubMed]
- Bauer, A.; Wollherr, D.; Buss, M. Human–Robot collaboration: A survey. Int. J. Hum. Robot. 2008, 5, 47–66. [Google Scholar] [CrossRef]
- Xia, Y.; Li, W.; Duan, S.; Lei, W.; Wu, J. Low-Cost, Light-Weight Scalable Soft Data Glove for VR Applications. In Proceedings of the 2022 5th International Conference on Circuits, Systems and Simulation (ICCSS), Nanjing, China, 13–15 May 2022; IEEE: Nanjing, China, 2022; pp. 202–205. [Google Scholar]
- Alves de Oliveira, T.E.; Cretu, A.-M.; Petriu, E.M. Multimodal Bio-Inspired Tactile Sensing Module. IEEE Sens. J. 2017, 17, 3231–3243. [Google Scholar] [CrossRef]
- Li, S.; Ma, X.; Liang, H.; Görner, M.; Ruppel, P.; Fang, B.; Sun, F.; Zhang, J. Vision-Based Teleoperation of Shadow Dexterous Hand Using End-to-End Deep Neural Network. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 416–422. [Google Scholar]
- Li, S.; Jiang, J.; Ruppel, P.; Liang, H.; Ma, X.; Hendrich, N.; Sun, F.; Zhang, J. A Mobile Robot Hand-Arm Teleoperation System by Vision and Imu. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; IEEE: New York, NY, USA, 2020; pp. 10900–10906. [Google Scholar]
- Gomez-Donoso, F.; Orts-Escolano, S.; Cazorla, M. Accurate and Efficient 3D Hand Pose Regression for Robot Hand Teleoperation Using a Monocular RGB Camera. Expert Syst. Appl. 2019, 136, 327–337. [Google Scholar] [CrossRef]
- Yang, W.; Paxton, C.; Cakmak, M.; Fox, D. Human Grasp Classification for Reactive Human-to-Robot Handovers. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 11123–11130. [Google Scholar]
- Du, G.; Zhang, P.; Mai, J.; Li, Z. Markerless Kinect-Based Hand Tracking for Robot Teleoperation. Int. J. Adv. Robot. Syst. 2012, 9, 36. [Google Scholar] [CrossRef]
- Handa, A.; Van Wyk, K.; Yang, W.; Liang, J.; Chao, Y.-W.; Wan, Q.; Birchfield, S.; Ratliff, N.; Fox, D. DexPilot: Vision-Based Teleoperation of Dexterous Robotic Hand-Arm System. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9164–9170. [Google Scholar]
- Chotiprayanakul, P.; Liu, D.K. Workspace Mapping and Force Control for Small Haptic Device Based Robot Teleoperation. In Proceedings of the 2009 International Conference on Information and Automation, Zhuhai/Macau, China, 22–24 June 2009; IEEE: New York, NY, USA, 2009; pp. 1613–1618. [Google Scholar]
- Farkhatdinov, I.; Ryu, J.-H.; An, J. A Preliminary Experimental Study on Haptic Teleoperation of Mobile Robot with Variable Force Feedback Gain. In Proceedings of the 2010 IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010; IEEE: New York, NY, USA, 2010; pp. 251–256. [Google Scholar]
- Tang, Y.; Liu, S.; Deng, Y.; Zhang, Y.; Yin, L.; Zheng, W. Construction of Force Haptic Reappearance System Based on Geomagic Touch Haptic Device. Comput. Methods Programs Biomed. 2020, 190, 105344. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G.; Xiao, X.; Li, C.; Ma, J.; Ponraj, G.; Prituja, A.V.; Ren, H. A Bimanual Robotic Teleoperation Architecture with Anthropomorphic Hybrid Grippers for Unstructured Manipulation Tasks. Appl. Sci. 2020, 10, 2086. [Google Scholar] [CrossRef]
- Asad, M.U.; Farooq, U.; Gu, J.; Abbas, G.; Liu, R.; Balas, V.E. A Composite State Convergence Scheme for Bilateral Teleoperation Systems. IEEE/CAA J. Autom. Sin. 2019, 6, 1166–1178. [Google Scholar] [CrossRef]
- Asad, M.U.; Gu, J.; Farooq, U.; Balas, V.E.; Balas, M.M.; Abbas, G. An Improved Composite State Convergence Scheme with Disturbance Compensation for Multilateral Teleoperation Systems. Stud. Inform Control 2022, 31, 43–52. [Google Scholar] [CrossRef]
- Yang, Y.; Jiang, H.; Hua, C.; Li, J. Practical Preassigned Fixed-Time Fuzzy Control for Teleoperation System under Scheduled Shared-Control Framework. IEEE Trans. Fuzzy Syst. 2024, 32, 470–482. [Google Scholar] [CrossRef]
- Fang, B.; Guo, D.; Sun, F.; Liu, H.; Wu, Y. A Robotic Hand-Arm Teleoperation System Using Human Arm/Hand with a Novel Data Glove. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; IEEE: Zhuhai, China, 2015; pp. 2483–2488. [Google Scholar]
- Caeiro-Rodríguez, M.; Otero-González, I.; Mikic-Fonte, F.A.; Llamas-Nistal, M. A Systematic Review of Commercial Smart Gloves: Current Status and Applications. Sensors 2021, 21, 2667. [Google Scholar] [CrossRef] [PubMed]
- Basjaruddin, N.C.; Sutjiredjeki, E.; Akbar, H.W.C. Developing an Electronic Glove Based on Fuzzy Logic for Mobile Robot Control. J. Intell. Fuzzy Syst. 2019, 36, 1639–1645. [Google Scholar] [CrossRef]
- Rodriguez, L.; Przedworska, Z.; Obidat, O.; Parron, J.; Wang, W. Development and Implementation of an AI-Embedded and ROS-Compatible Smart Glove System in Human-Robot Interaction. In Proceedings of the 2022 IEEE 19th International Conference on Mobile Ad Hoc and Smart Systems (MASS), Denver, CO, USA, 19–23 October 2022; IEEE: Denver, CO, USA, 2022; pp. 699–704. [Google Scholar]
- Ali, M.; Malik, A.; Yusof, Z.M.; Kushairy, A.K.; Zaharah, H.F.; Ismail, A. Development of Smart Glove System for Therapy Treatment. In Proceedings of the 2015 International Conference on BioSignal Analysis, Processing and Systems (ICBAPS), Kuala, Lumpur, 26–28 May 2015; IEEE: Kuala, Lumpur, 2015; pp. 67–71. [Google Scholar]
- Li, F.; Chen, J.; Zhou, Z.; Xie, J.; Gao, Z.; Xiao, Y.; Dai, P.; Xu, C.; Wang, X.; Zhou, Y. Lightweight Soft Robotic Glove with Whole-Hand Finger Motion Tracking for Hand Rehabilitation in Virtual Reality. Biomimetics 2023, 8, 425. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Q.; Da Fonseca, V.P.; Lima, B.M.R.; Welyhorsky, M.; Goubran, M.; De Oliveira, T.E.A.; Petriu, E.M. Teleoperated Grasping Using a Robotic Hand and a Haptic-Feedback Data Glove. In Proceedings of the 2020 IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24 August 2020; IEEE: Montreal, QC, Canada, 2020; pp. 1–7. [Google Scholar]
- Dhepekar, P.; Adhav, Y.G. Wireless Robotic Hand for Remote Operations Using Flex Sensor. In Proceedings of the 2016 International Conference on Automatic Control and Dynamic Optimization Techniques (ICACDOT), Pune, India, 9–10 September 2016; IEEE: Pune, India, 2016; pp. 114–118. [Google Scholar]
- Colasanto, L.; Suarez, R.; Rosell, J. Hybrid Mapping for the Assistance of Teleoperated Grasping Tasks. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 390–401. [Google Scholar] [CrossRef]
- Tyagi, V.; Gupta, N.K.; Tyagi, P.K. Smart Wheelchair Using Fuzzy Inference System. In Proceedings of the 2013 IEEE Global Humanitarian Technology Conference: South Asia Satellite (GHTC-SAS), Trivandrum, India, 23–24 August 2013; IEEE: New York, NY, USA, 2013; pp. 175–180. [Google Scholar]
- ElKoura, G.; Singh, K. Handrix: Animating the Human Hand. In Proceedings of the 2003 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, San Diego, CA, USA, 26–27 July 2003; pp. 110–119. [Google Scholar]
- Li, K.; Chen, I.-M.; Yeo, S.H.; Lim, C.K. Development of Finger-Motion Capturing Device Based on Optical Linear Encoder. J. Rehabil. Res. Dev. 2011, 48, 69. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.; Wu, Y.; Huang, T.S. Modeling the Constraints of Human Hand Motion. In Proceedings of the Proceedings Workshop on Human Motion, Austin, TX, USA, 7–8 December 2000; IEEE: New York, NY, USA, 2000; pp. 121–126. [Google Scholar]
- Tanaka, K.; Sugeno, M. Stability Analysis and Design of Fuzzy Control Systems. Fuzzy Sets Syst. 1992, 45, 135–156. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manipulator Action | Gesture |
|---|---|
| Return to position | No finger bend |
| Move robotic joint 1 | Bend left ring finger (left_ring) and bend right thumb PIP joint (right_x) |
| Move robotic joint 2 | Bend left ring finger (left_ring) and bend right index fin-ger (right_x) |
| Move robotic joint 3 | Bend left ring finger (left_ring) and bend right middle fin-ger (right_x) |
| Move robotic joint 4 | Bend left ring finger (left_ring) and bend right ring fin-ger (right_x) |
| Move robotic joint 5 | Bend left ring finger (left_ring) and bend right little fin-ger (right_x) |
| Move robotic joint 6 | Bend left ring finger (left_ring) and bend right thumb MCP joint (rt_mcp) |
| Joint Velocity (velj) | Left_Ring | |||||||
|---|---|---|---|---|---|---|---|---|
| VS | S | MS | M | ML | L | VL | ||
| right fingers’ flexion standard value | VS | Z | Z | Z | Z | Z | Z | Z |
| S | Z | Z | Z | Z | Z | Z | Z | |
| MS | NS | NS | NS | Z | S | S | S | |
| M | NS | NS | NS | Z | S | S | S | |
| ML | NS | NS | NS | Z | S | S | S | |
| L | NB | NB | NS | Z | S | PB | PB | |
| VL | NB | NB | NB | Z | PB | PB | PB | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.; Jin, L.; Liu, Y.; Wang, J.; Li, W. Teleoperated Grasping Using Data Gloves Based on Fuzzy Logic Controller. Biomimetics 2024, 9, 116. https://doi.org/10.3390/biomimetics9020116
Lu C, Jin L, Liu Y, Wang J, Li W. Teleoperated Grasping Using Data Gloves Based on Fuzzy Logic Controller. Biomimetics. 2024; 9(2):116. https://doi.org/10.3390/biomimetics9020116
Chicago/Turabian StyleLu, Chunxiao, Lei Jin, Yufei Liu, Jianfeng Wang, and Weihua Li. 2024. "Teleoperated Grasping Using Data Gloves Based on Fuzzy Logic Controller" Biomimetics 9, no. 2: 116. https://doi.org/10.3390/biomimetics9020116
APA StyleLu, C., Jin, L., Liu, Y., Wang, J., & Li, W. (2024). Teleoperated Grasping Using Data Gloves Based on Fuzzy Logic Controller. Biomimetics, 9(2), 116. https://doi.org/10.3390/biomimetics9020116