Author Contributions
Conceptualization, S.H., X.C. and S.L.; methodology, S.H., X.C. and S.L.; software, S.H., J.L., Q.T. and Z.L.; validation, J.L., M.X., B.P., K.L. and Z.L.; formal analysis, S.H., P.Y. and B.P.; investigation, J.L. and P.Y.; resources, X.C. and L.W.; data curation, S.H., M.X. and M.D.; writing—original draft, S.H., P.Y., Q.T. and K.L.; writing—review and editing, S.H. and X.C.; visualization, S.H., M.X. and M.D.; supervision, S.H. and X.C.; project administration, X.C. and L.W.; funding acquisition, X.C. and L.W. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Bionic observation objects. (a) Portunus; (b) Portunus’ shell part for coordinate measuring machine scanning; (c) crab shell model obtained after scanning, with the x-axis positive direction being the forward direction of the crab when it walks horizontally to the left and the z-axis positive direction being the z-axis positive direction of the geodetic coordinate system. (The Portunus’ shell specimens used for scanning in the study were dead crabs purchased from seafood markets in compliance with local regulations and ethical guidelines.)
Figure 1.
Bionic observation objects. (a) Portunus; (b) Portunus’ shell part for coordinate measuring machine scanning; (c) crab shell model obtained after scanning, with the x-axis positive direction being the forward direction of the crab when it walks horizontally to the left and the z-axis positive direction being the z-axis positive direction of the geodetic coordinate system. (The Portunus’ shell specimens used for scanning in the study were dead crabs purchased from seafood markets in compliance with local regulations and ethical guidelines.)
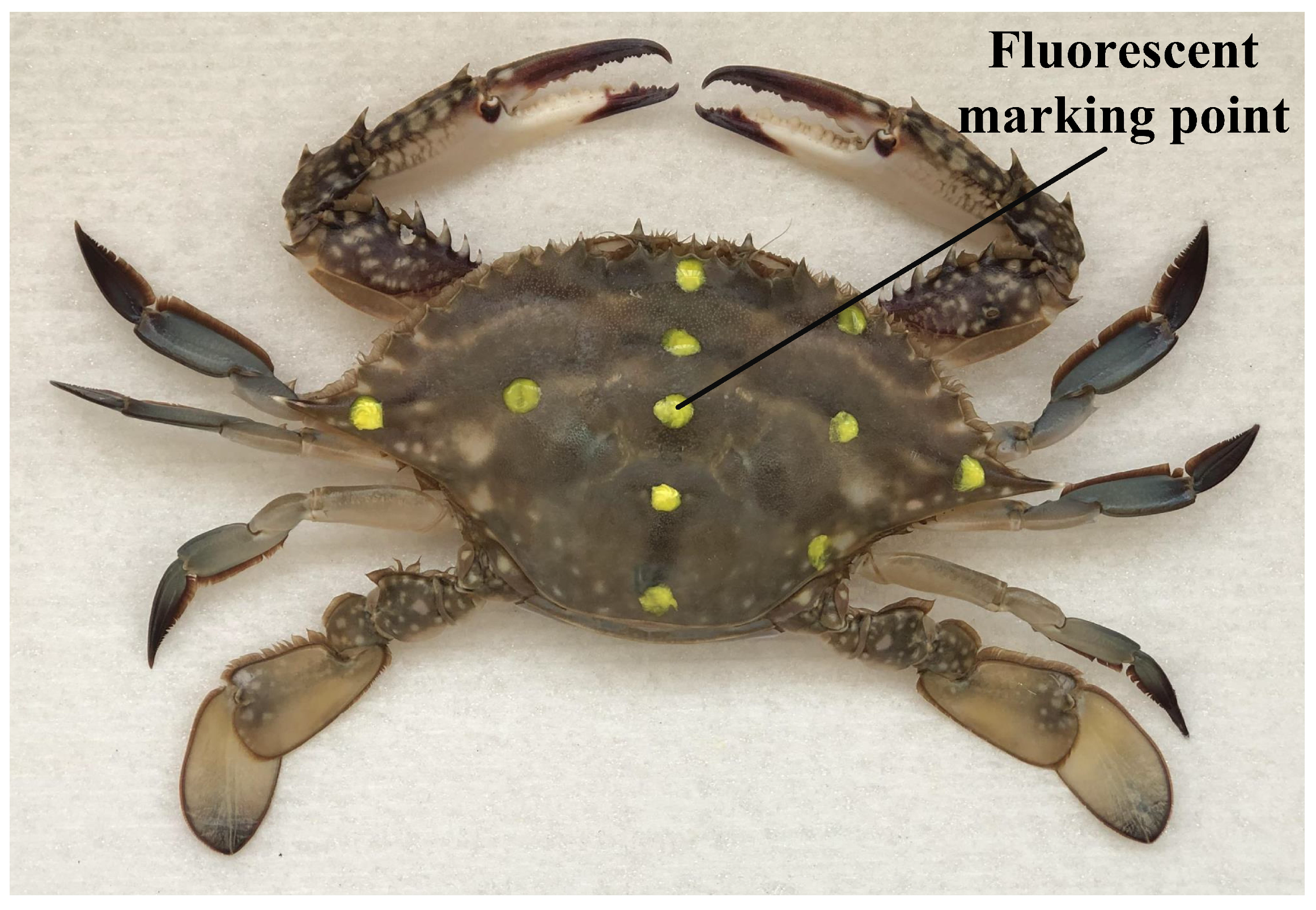
Figure 2.
Fluorescent marker distribution.
Figure 2.
Fluorescent marker distribution.
Figure 3.
Motion observation system.
Figure 3.
Motion observation system.
Figure 4.
DLT software operation interface and processing. (a) DLT software calibration interface; (b) front side high-speed camera calibration situation; (c) right side high-speed camera calibration situation; (d) display of marking points in the front side video (highlighted in the green box in the figure); (e) display of marked points in the right side video, with the marked points within the green box in the figure.
Figure 4.
DLT software operation interface and processing. (a) DLT software calibration interface; (b) front side high-speed camera calibration situation; (c) right side high-speed camera calibration situation; (d) display of marking points in the front side video (highlighted in the green box in the figure); (e) display of marked points in the right side video, with the marked points within the green box in the figure.
Figure 5.
Biological observation data.
Figure 5.
Biological observation data.
Figure 6.
Hydrodynamic simulation flow field and grid setting. (a) The range of fluid domain and the arrangement of experimental equipment in the fluid domain; (b) the grid setting in the fluid domain.
Figure 6.
Hydrodynamic simulation flow field and grid setting. (a) The range of fluid domain and the arrangement of experimental equipment in the fluid domain; (b) the grid setting in the fluid domain.
Figure 7.
Simulated flow field diagram. The distribution of flow field at 13° transverse angle, 7° longitudinal angle, and 204 mm ground clearance height.
Figure 7.
Simulated flow field diagram. The distribution of flow field at 13° transverse angle, 7° longitudinal angle, and 204 mm ground clearance height.
Figure 8.
The multiple regression analysis results of the drag coefficient of simulation data (-Sim). We conducted data analysis on four aspects: significance analysis of samples, regression model error, model construction order, and the proportion of independent variable increment impact.
Figure 8.
The multiple regression analysis results of the drag coefficient of simulation data (-Sim). We conducted data analysis on four aspects: significance analysis of samples, regression model error, model construction order, and the proportion of independent variable increment impact.
Figure 9.
The multiple regression analysis results of the lift coefficient of simulation data (-Sim). We conducted data analysis on four aspects: significance analysis of samples, regression model error, model construction order, and the proportion of independent variable increment impact.
Figure 9.
The multiple regression analysis results of the lift coefficient of simulation data (-Sim). We conducted data analysis on four aspects: significance analysis of samples, regression model error, model construction order, and the proportion of independent variable increment impact.
Figure 10.
Scatter plots of -Sim and -Sim with changes in transverse angle (TA) and longitudinal angle (LA).
Figure 10.
Scatter plots of -Sim and -Sim with changes in transverse angle (TA) and longitudinal angle (LA).
Figure 11.
The experimental verification platform. (a) The three-dimensional model of the experimental platform. (b) The aluminum alloy support frame installed and fixed on the circulating water tank, where the ground height of model can be adjusted. (c) The simulated bottom and model parts in the circulating water tank. (d) The transverse and longitudinal angle adjustment devices. The dial can be adjusted to the appropriate angle, and the nut tightened to secure it.
Figure 11.
The experimental verification platform. (a) The three-dimensional model of the experimental platform. (b) The aluminum alloy support frame installed and fixed on the circulating water tank, where the ground height of model can be adjusted. (c) The simulated bottom and model parts in the circulating water tank. (d) The transverse and longitudinal angle adjustment devices. The dial can be adjusted to the appropriate angle, and the nut tightened to secure it.
Figure 12.
The sensor acquisition device.
Figure 12.
The sensor acquisition device.
Figure 13.
The multiple regression analysis results of the drag coefficient of experimental data (-Exp). We conducted data analysis on four aspects: significance analysis of samples, regression model error, model construction order, and the proportion of independent variable increment impact.
Figure 13.
The multiple regression analysis results of the drag coefficient of experimental data (-Exp). We conducted data analysis on four aspects: significance analysis of samples, regression model error, model construction order, and the proportion of independent variable increment impact.
Figure 14.
The multiple regression analysis results of the lift coefficient of experimental data (-Exp). We conducted data analysis on four aspects: significance analysis of samples, regression model error, model construction order, and the proportion of independent variable increment impact.
Figure 14.
The multiple regression analysis results of the lift coefficient of experimental data (-Exp). We conducted data analysis on four aspects: significance analysis of samples, regression model error, model construction order, and the proportion of independent variable increment impact.
Figure 15.
Comparison diagram between simulation and experimental data. (a) The drag coefficient varies with the transverse angle (TA) and longitudinal angle (LA). The color of the points in the figure represents the variation in the longitudinal angle. The dots represent experimental data, with colors ranging from black to blue. The diamond point simulation data shows colors ranging from purple to yellow. (b) The variation in lift coefficient with transverse and longitudinal angles.
Figure 15.
Comparison diagram between simulation and experimental data. (a) The drag coefficient varies with the transverse angle (TA) and longitudinal angle (LA). The color of the points in the figure represents the variation in the longitudinal angle. The dots represent experimental data, with colors ranging from black to blue. The diamond point simulation data shows colors ranging from purple to yellow. (b) The variation in lift coefficient with transverse and longitudinal angles.
Figure 16.
Robot models and experimental sites.
Figure 16.
Robot models and experimental sites.
Figure 17.
Four different lengths of toes. (a) is the toe of the foot after a 5 mm decrease in length, (b) is the usual toe length of the robot, (c) is the toe of the foot after a 10 mm increase, (d) is the toe of the foot after a 20 mm increase.
Figure 17.
Four different lengths of toes. (a) is the toe of the foot after a 5 mm decrease in length, (b) is the usual toe length of the robot, (c) is the toe of the foot after a 10 mm increase, (d) is the toe of the foot after a 20 mm increase.
Figure 18.
Changes in transverse angle (TA) and average power under three different gaits.
Figure 18.
Changes in transverse angle (TA) and average power under three different gaits.
Figure 19.
The variation in attitude angle and attitude angle change rate over time during robot motion. G1, G2, and G3 in the figure represent Gait1, Gait2, and Gait3, the three gaits we designed.
Figure 19.
The variation in attitude angle and attitude angle change rate over time during robot motion. G1, G2, and G3 in the figure represent Gait1, Gait2, and Gait3, the three gaits we designed.
Table 1.
Simulation selected attitude parameters.
Table 1.
Simulation selected attitude parameters.
| Parameters | Values |
|---|
| Transverse angle | | | | | |
| Longitudinal angle | | | | | |
| Ratio of height to body length | 0.25 | 0.33 | 0.41 | 0.49 | 0.57 |
| Height of ground clearance | 124 mm | 164 mm | 204 mm | 244 mm | 284 mm |
Table 2.
Correlation analysis on drag coefficients in simulation data (-Sim).
Table 2.
Correlation analysis on drag coefficients in simulation data (-Sim).
| Sample 1 | Sample 2 | N | Correlation | p-Value |
|---|
| H | -Sim | 125 | −0.050 | 0.580 |
| TA | -Sim | 125 | −0.961 | 0.000 |
| LA | -Sim | 125 | 0.229 | 0.010 |
| TA | H | 125 | 0.000 | 1.000 |
| LA | H | 125 | 0.000 | 1.000 |
| LA | TA | 125 | 0.000 | 1.000 |
Table 3.
Optimal subset of drag coefficient from simulation data (-Sim).
Table 3.
Optimal subset of drag coefficient from simulation data (-Sim).
| Vars | R-Sq | R-Sq(adj) | R-Sq(pred) | Mallows’ CP | H | TA | LA |
|---|
| 1 | 92.3 | 92.3 | 92.1 | 308.8 | | X | |
| 1 | 5.3 | 4.5 | 2.1 | 5194.4 | | | X |
| 1 | 0.2 | 0.0 | 0.0 | 5475.3 | X | | |
| 2 | 97.6 | 97.6 | 97.4 | 16.0 | | X | X |
| 2 | 92.6 | 92.5 | 92.2 | 296.9 | X | X | |
| 2 | 5.5 | 4.0 | 0.7 | 5182.4 | X | | X |
| 3 | 97.8 | 97.8 | 97.7 | 4.0 | X | X | X |
Table 4.
Correlation analysis on lift coefficients in simulation data (-Sim).
Table 4.
Correlation analysis on lift coefficients in simulation data (-Sim).
| Sample 1 | Sample 2 | N | Correlation | p-Value |
|---|
| H | -Sim | 125 | −0.210 | 0.019 |
| TA | -Sim | 125 | −0.736 | 0.000 |
| LA | -Sim | 125 | −0.261 | 0.003 |
| TA | H | 125 | 0.000 | 1.000 |
| LA | H | 125 | 0.000 | 1.000 |
| LA | TA | 125 | 0.000 | 1.000 |
Table 5.
Optimal subset of lift coefficient from simulation data (-Sim).
Table 5.
Optimal subset of lift coefficient from simulation data (-Sim).
| Vars | R-Sq | R-Sq(adj) | R-Sq(pred) | Mallows’ CP | H | TA | LA |
|---|
| 1 | 54.1 | 53.7 | 52.6 | 39.2 | | X | |
| 1 | 6.8 | 6.1 | 3.4 | 204.3 | | | X |
| 1 | 4.4 | 3.6 | 1.2 | 212.8 | X | | |
| 2 | 60.9 | 60.3 | 58.7 | 17.4 | | X | X |
| 2 | 58.5 | 57.8 | 56.3 | 25.8 | X | X | |
| 2 | 11.2 | 9.8 | 6.3 | 190.9 | X | | X |
| 3 | 65.3 | 64.5 | 62.7 | 4.0 | X | X | X |
Table 6.
Description of sensor parameters.
Table 6.
Description of sensor parameters.
| Senor Performance | Fx, Fy | Fz | Tx, Ty | Tz |
|---|
| Sensing Range | 130 N | 400 N | 10 Nm | 10 Nm |
| Resolution | 1/20 N | 1/10 N | 1/400 Nm | 1/400 Nm |
| Resonant Frequency | 1250 Hz | 940 Hz | 940 Hz | 1250 Hz |
Table 7.
Correlation analysis on drag coefficients in experimental data (-Exp).
Table 7.
Correlation analysis on drag coefficients in experimental data (-Exp).
| Sample 1 | Sample 2 | N | Correlation | p-Value |
|---|
| H | -Exp | 125 | −0.435 | 0.000 |
| TA | -Exp | 125 | −0.847 | 0.000 |
| LA | -Exp | 125 | 0.050 | 0.578 |
| TA | H | 125 | 0.074 | 0.410 |
| LA | H | 125 | 0.389 | 0.000 |
| LA | TA | 125 | 0.000 | 1.000 |
Table 8.
Optimal subset of drag coefficient from experimental data (-Exp).
Table 8.
Optimal subset of drag coefficient from experimental data (-Exp).
| Vars | R-Sq | R-Sq(adj) | R-Sq(pred) | Mallows’ CP | H | TA | LA |
|---|
| 1 | 71.7 | 71.5 | 70.7 | 226.1 | | X | |
| 1 | 18.9 | 18.3 | 16.4 | 873.2 | X | | |
| 1 | 0.3 | 0.0 | 0.0 | 1102.0 | | | X |
| 2 | 85.6 | 85.4 | 84.9 | 57.5 | X | X | |
| 2 | 71.9 | 71.5 | 70.5 | 225.0 | | X | X |
| 2 | 24.6 | 23.4 | 21.0 | 805.5 | X | | X |
| 3 | 90.1 | 89.9 | 89.4 | 4.0 | X | X | X |
Table 9.
Correlation analysis on lift coefficients in experimental data (-Exp).
Table 9.
Correlation analysis on lift coefficients in experimental data (-Exp).
| Sample 1 | Sample 2 | N | Correlation | p-Value |
|---|
| H | -Exp | 125 | 0.068 | 0.451 |
| TA | -Exp | 125 | −0.964 | 0.000 |
| LA | -Exp | 125 | 0.153 | 0.089 |
| TA | H | 125 | 0.074 | 0.410 |
| LA | H | 125 | 0.389 | 0.000 |
| LA | TA | 125 | 0.000 | 1.000 |
Table 10.
Optimal subset of lift coefficient from experimental data (-Exp).
Table 10.
Optimal subset of lift coefficient from experimental data (-Exp).
| Vars | R-Sq | R-Sq(adj) | R-Sq(pred) | Mallows’ CP | H | TA | LA |
|---|
| 1 | 93.0 | 93.0 | 92.7 | 96.0 | | X | |
| 1 | 2.3 | 1.5 | 0.0 | 2910.7 | | | X |
| 1 | 0.5 | 0.0 | 0.0 | 2968.7 | X | | |
| 2 | 95.3 | 95.3 | 95.1 | 25.7 | | X | X |
| 2 | 95.0 | 94.9 | 94.7 | 37.1 | X | X | |
| 2 | 2.3 | 0.7 | 0.0 | 2912.5 | X | | X |
| 3 | 96.1 | 96.0 | 95.8 | 4.0 | X | X | X |

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}