1. Introduction
Miniature robots generally refer to robots with feature sizes less than 10 cm [
1]. In recent years, robots at this scale have become a hotspot for researchers. In particular, due to their small size, light weight, and agility of movement, miniature robots will play an irreplaceable role in search and rescue, exploration, medical diagnostics, and fault detection in confined environments [
2,
3,
4,
5]. With the development of new materials and processes, the drive elements of miniature robots are also enriched. These elements include electromagnetic motors [
6,
7], shape memory alloys (SMAs) [
8,
9], dielectric elastomers [
10,
11], and piezoelectric ceramics [
12,
13,
14,
15,
16]. Piezoelectric elements are widely used as actuators for miniature robots because they have the advantages of a fast response, a high power density, and no electromagnetic interference.
The payload capacity and speed of the miniature robots are directly related to the motion performance. The greater the load capacity, the more sensors the robot can carry, and, thus, the more functions and tasks the robot can perform; the faster the speed, the shorter the time it takes for the robot to reach its destination. Consequently, it is necessary to increase the payload capacity and speed of the miniature robots. There are several works of research on the kinematics model of miniature robots [
17,
18,
19], which are mainly used to guide the gait design and trajectory planning for robots. In response to the increased performance of the Harvard Ambulatory Micro-Robot (HAMR) series of robots, the actuation model of the robots was developed, leading to the improved design of the actuator and transmission [
20,
21]. The output performance of the actuator also affects the motion performance of the robots, so the exploration and optimization of the actuator manufacturing process is also the focus of the research. Wood et al. not only studied various manufacturing processes for piezoelectric actuators [
22,
23], but also optimized the morphology parameters of the actuators, resulting in a significant increase in energy density compared to existing commercial piezoelectric bending actuators [
24]. In addition, a non-linear, dynamic model of the flexure-based transmission in the HAMR was presented and the transmission was redesigned based on experimental data to improve the performance in the quasi-static mode [
25]. To take full advantage of the excellent performance of the actuator in resonance, researchers at the University of Newcastle have developed a six-legged piezoelectric robot that can reach speeds of up to 55 cm/s [
26,
27,
28].
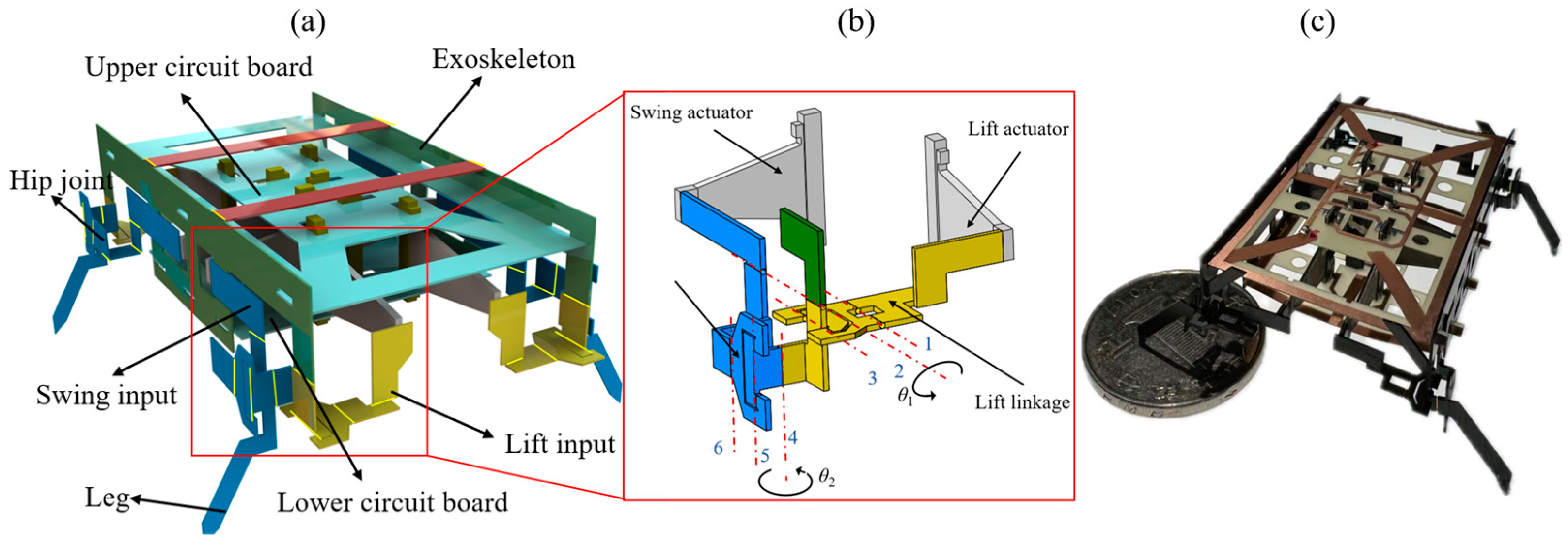
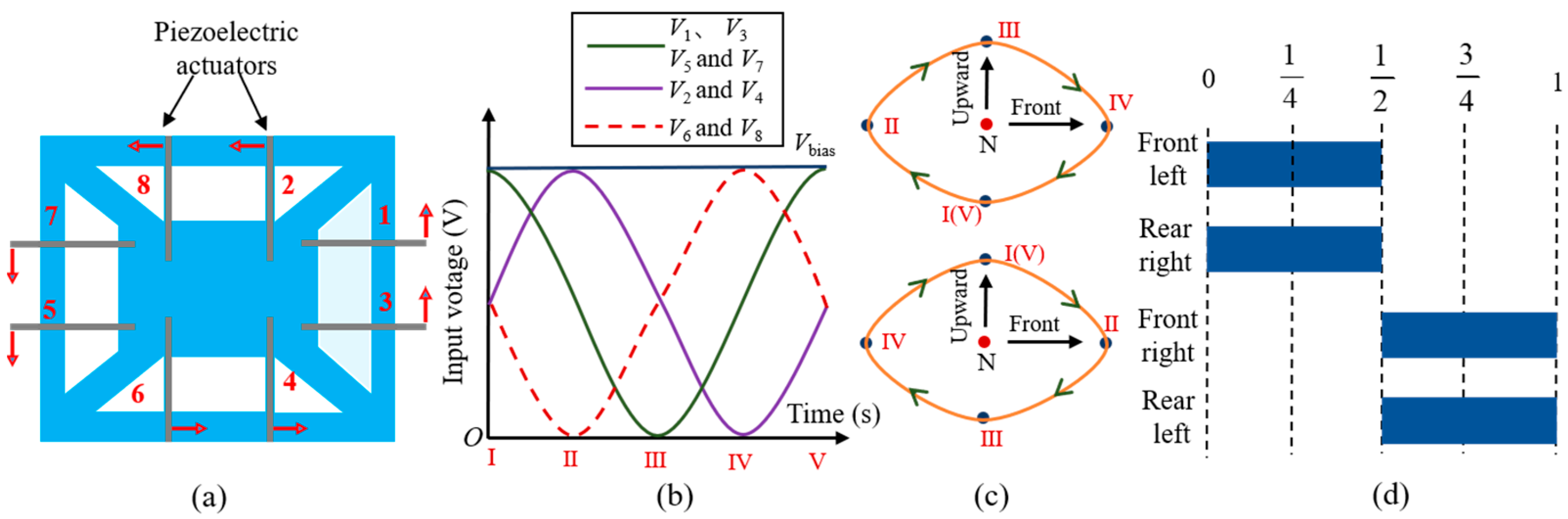
In this paper, we designed and manufactured a miniature piezoelectric quadrupedal robot named SMR-O, which includes exoskeletons, powertrains, four legs, and eight piezoelectric actuators. We designed a new spatial parallel mechanism that mimics the motion joints of insects, which can achieve two degrees of freedom of motion. The leg is connected to this motion joint, and each leg has two output degrees of freedom (DOFs): swing and lift. The robot’s gait is a common trot gait of insects, which is realized by controlling the phase of the drive signals of eight actuators. The robot can move forward and turn by appropriate phase inputs to the eight piezoelectric actuators. Compared to the previous version of the robot SMR-M designed by us [
29], which mainly focused on the design of the transmission mechanism and exploration of the robot manufacturing process, this paper conducted a systematic analysis and optimization of the robot powertrain and improved the fabrication process of the actuator. We proposed a novel process for the batch manufacturing of piezoelectric bending actuators, which allows for a more reliable bonding between copper traces and actuators and avoids the shorting of the PZT. Meanwhile, due to the use of alumina as the base and carbon fiber as the bridge at the PZT–alumina interface, the output performance of the actuator has also been significantly improved. Moreover, a drive model for the lift DOF of the transmission was developed, based on which the linkage dimensions in the transmission were optimally designed, enabling the robot leg to have a greater output force. The output performance of the actuators and the output force of the legs were measured. Furthermore, we experimentally obtained the frequency response of each powertrain and actuated the powertrain in the resonance regime to improve the motion performance.
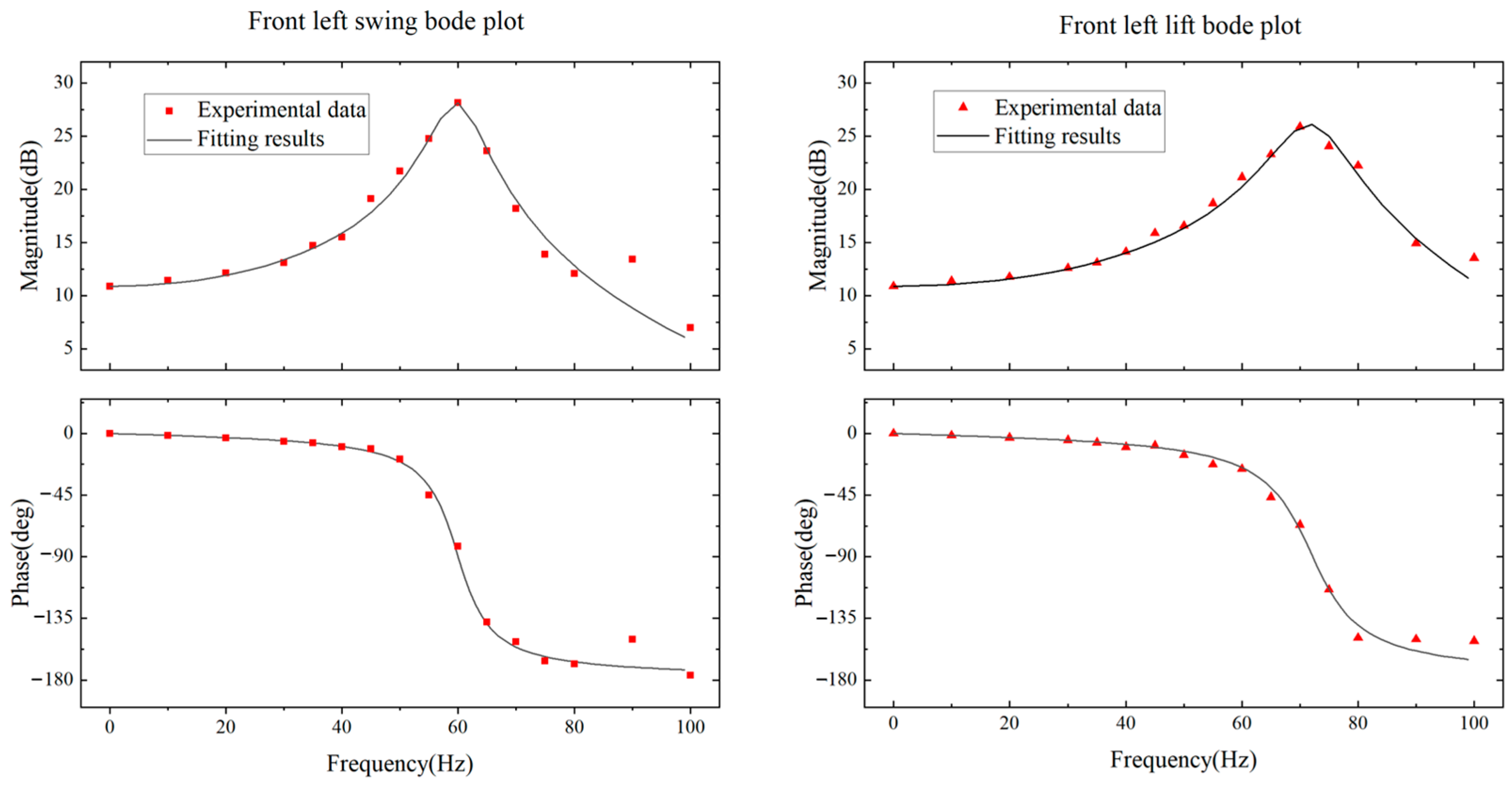
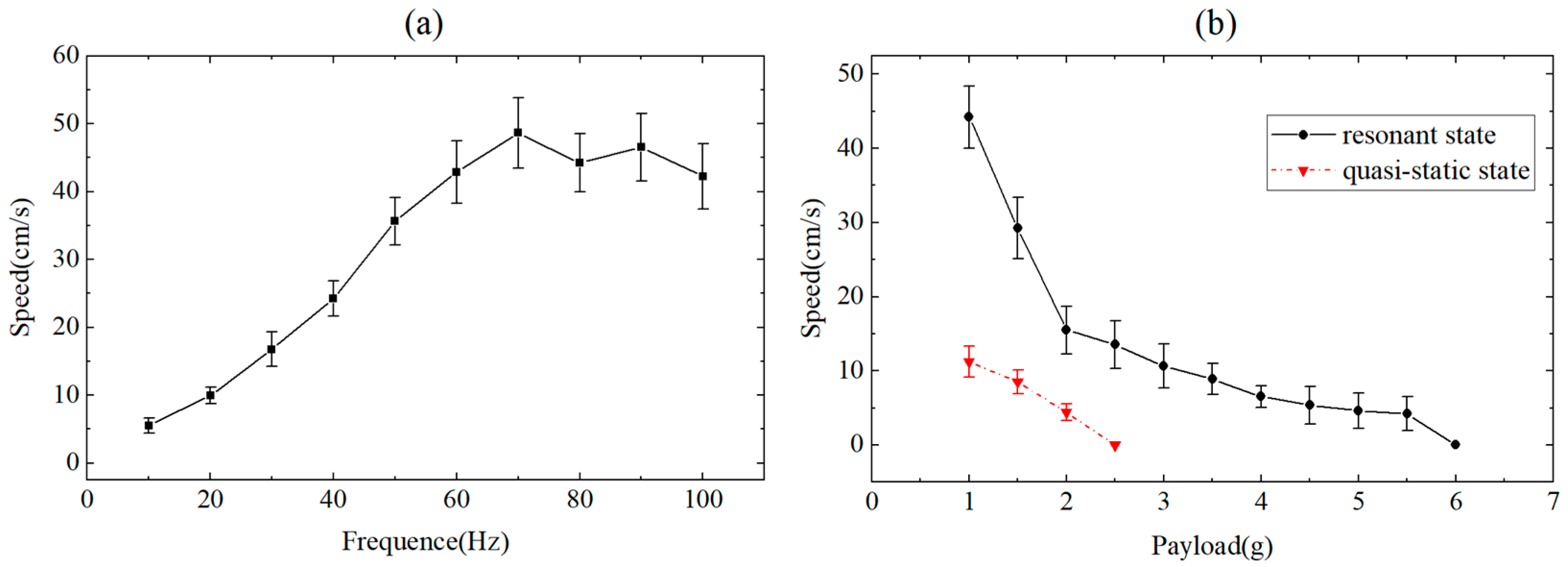
The contributions of this paper include the following: (i) A manufacturing method for piezoelectric actuators different from HAMR has been proposed. During the stacking process, discrete pre-patterned PZT pieces are used instead of a whole PZT piece to avoid PZT dielectric failure caused by unexpected laser cutting during actuator release. Copper-clad FR-4 instead of copper foil is adopted as the solder pad to improve the reliability of the bonding between the pad and the actuator. (ii) The link lengths of the robot’s transmission mechanism and the robot’s leg lengths have been optimized based on the actuation model of the powertrain, which enables the robot legs to have a greater force to carry the robot. (iii) Because the motion of each robot leg is determined by the powertrain including the actuator and transmission mechanism, it is necessary to drive the robot’s powertrain instead of the actuator to a resonant state. We obtained the resonance frequency of the powertrain and its phase shift relative to the input signal through experiments and fitting. We drive the powertrain to a resonance state to make the robot leg produce a greater displacement and force; the motion performance of the robot has been greatly improved, with an unloaded speed of 48.66 cm/s and a payload capacity of 5.5 g. This locomotion performance is greatly improved compared with the speed of 5.32 cm/s and the payload capacity of 2.5 g at a drive frequency of 10 Hz.
The paper is organized as follows:
Section 2 introduces the components of the robot and provides a detailed description of the hip joint of the robot as a transmission mechanism. In
Section 3, a new manufacturing method for piezoelectric actuators is proposed. The composition of the actuator and the three steps of the manufacturing process are described in detail. In
Section 4, the robot powertrain is modeled. Based on this model, the link lengths of the transmission mechanism and the robot’s leg lengths are optimized with the optimization objective of maximizing the leg output force. In
Section 5, the output indicators of the actuator, the output force of the robot legs, the frequency response of the powertrain, and the locomotion performance of the robot are tested. Finally, in
Section 6, the work of this paper is summarized.
3. Piezoelectric Actuator Manufacturing
There are two main differences between the manufacturing method of the actuator in this paper and the manufacturing method in [
22]. One is the use of copper-clad FR-4 rather than copper foil as the pads because the copper foil can easily fall off during high-temperature soldering. The other is the use of discrete patterned pieces of PZT rather than a whole PZT piece to prevent the shorting of the PZT caused by unexpected high-power laser cutting during the actuator release process.
The core elements of the piezoelectric bimorph bending actuator are the carbon fiber (CF) layer located in the central layer and the two PZT layers above and below it. The prepreg CF is used to bond the two layers of PZT and to introduce the external electrical signals, as well as to provide a certain degree of stiffness for the actuator. The PZT is the active deformation layer that provides the prime force for the bending of the actuator. Considering that PZT is a brittle material, a strong base is necessary for a reliable connection of the actuator to the circuit board. At the same time, a rigid extension is necessary in order to withstand loads and amplify output displacements. Naturally, parasitic bending occurs at the interface between the PZT and the base (or the extension). To eliminate bending at the interface, rigid attachments such as FR-4 and carbon fiber are needed. Carbon fiber has a higher strength and is, therefore, more effective in preventing parasitic bending. However, in order to solder the actuator to the circuit board, additional copper foils acting as pads need to be bonded to the carbon fiber [
22]. Typically, the bonding of the copper foil to the carbon fiber is not strong at high temperatures, and precise cuts that do not damage the carbon fiber are required to achieve the patterning of the copper foil. To face the problem, we use commercial copper-clad FR-4 instead of copper foil as the pads.
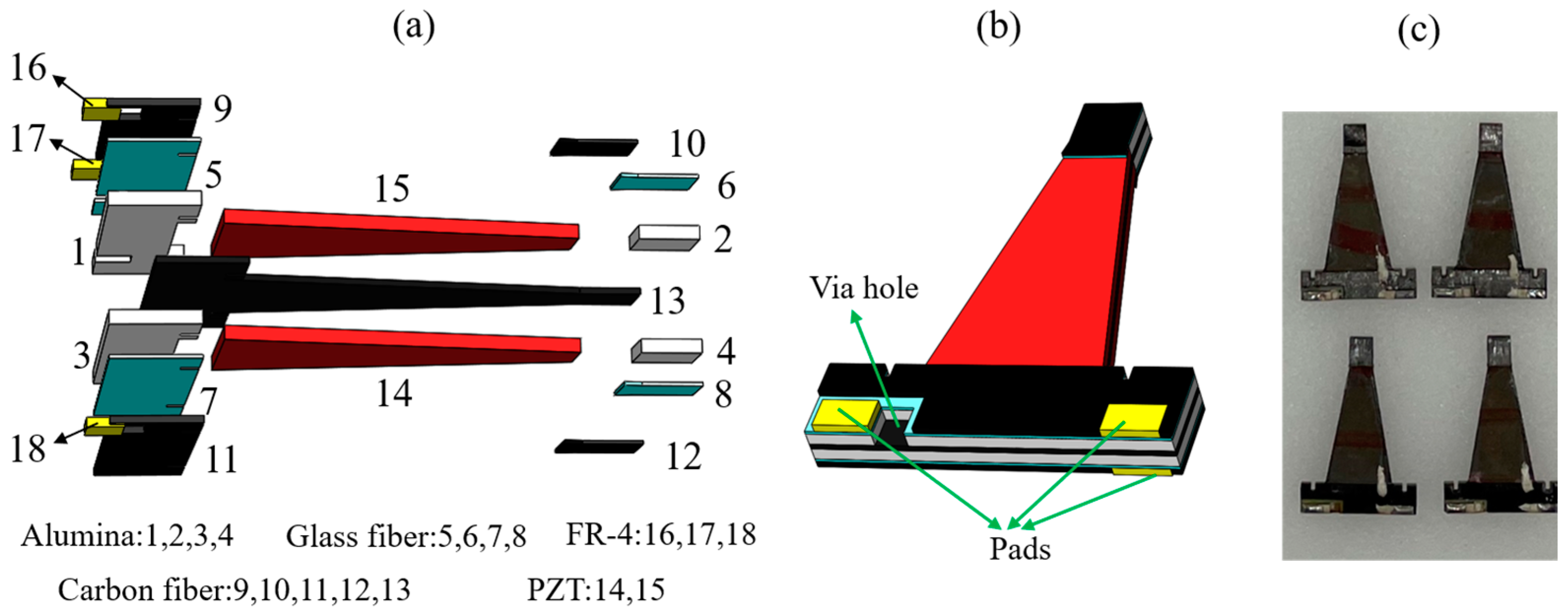
The piezoelectric actuators in this paper consist of PZT-5H, prepreg CF (including the central CF and CF attachment), alumina, prepreg glass fiber (GF), and copper-clad FR-4, as shown in
Figure 2a. The central carbon fiber is sandwiched between two layers of PZT. Alumina in the same plane as PZT is used as the rigid base and the extension of the actuator. The prepreg glass fiber firmly adheres FR-4 to the actuator. The CF ‘bridges’ the PZT–alumina interface and provides a strong attachment preventing bending at this interface. Moreover, the patterned copper-clad FR-4 pads provide electrical connections between the PZT pieces and off-board power electronics. Three pads are connected to the bias voltage, the drive voltage, and the ground, respectively. The via hole is formed through the alumina and the glass fiber to make contact with the central carbon fiber as shown in
Figure 2b.
The batch manufacturing process for actuators is divided into three main steps. The first step is to cut the required materials using the diode-pumped solid-state (DPSS) UV laser to obtain various components that need to be stacked, including individual pieces of PZT, alumina, central CF, CF attachment, glass fiber, FR-4 jig, and copper-clad FR-4. It is worth noting that we cut all of the way through the PZT at sufficiently low power to improve the flexure strength as much as possible. And the low laser power is to avoid the dielectric breakdown of the PZT. The main role of the prepreg glass fiber is to bond the FR-4 to the actuator by the resin in it, so a very thin glass fiber layer (30 μm in thickness) is selected to avoid adding extra mass to the actuator.
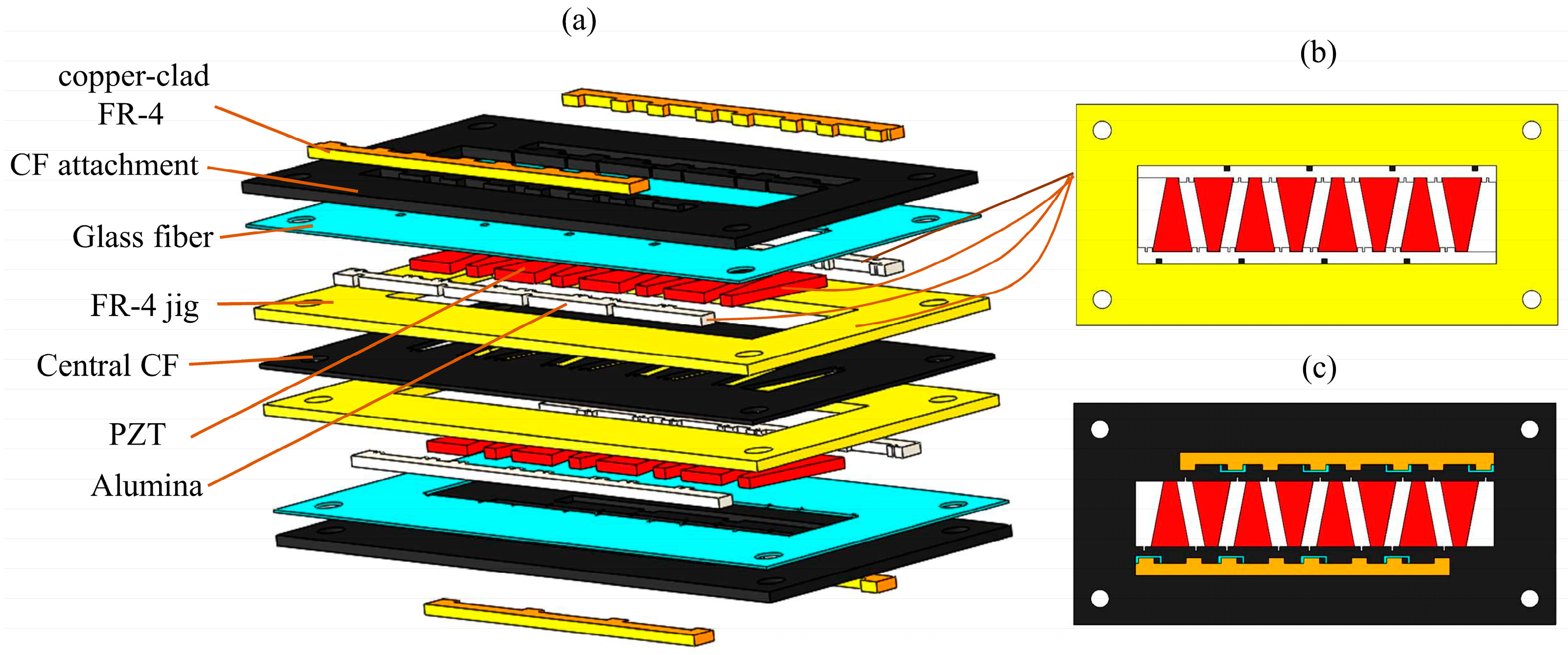
The next step is to stack the prepared components mentioned above. The stacking order of these components is shown in
Figure 3a. The individual pieces of PZT and two alumina strips are placed carefully into the FR-4 jig, using instant adhesive to hold them in place. That is, the PZT, alumina, and FR4 jig are in the same layer and their positional relationship is shown in
Figure 3b. In order to improve the dielectric strength of the PZT, cyanoacrylate (CA) glue is applied at the interface between the PZT and alumina and the edges of the PZT. The materials of other layers are stacked in order. The copper-clad FR-4 strip is on the same layer as the top CF and is firmly bonded to the actuator through the glass fiber, forming a solder pad for the actuator. The final stack is cured at a temperature of 120 °C to achieve the complete curing of the resin in carbon fiber and glass fiber. After curing is complete, a laminate with seven layers of materials firmly bonded together is formed; the top view schematic diagram of the stacked laminate is shown in
Figure 3c.
The final step is to release each actuator from the laminate by laser cutting. Conductive epoxy is applied to the via hole and the nearby pad to form an electrical connection. It should be pointed out that there is a certain gap between the pad at the via hole and the CF attachment as can be seen in
Figure 2b, which is to prevent an electrical connection between the two pads located on the same side of the actuator by the carbon fiber. A photo of the fabricated actuators with a length of 16 mm is shown in
Figure 2c.
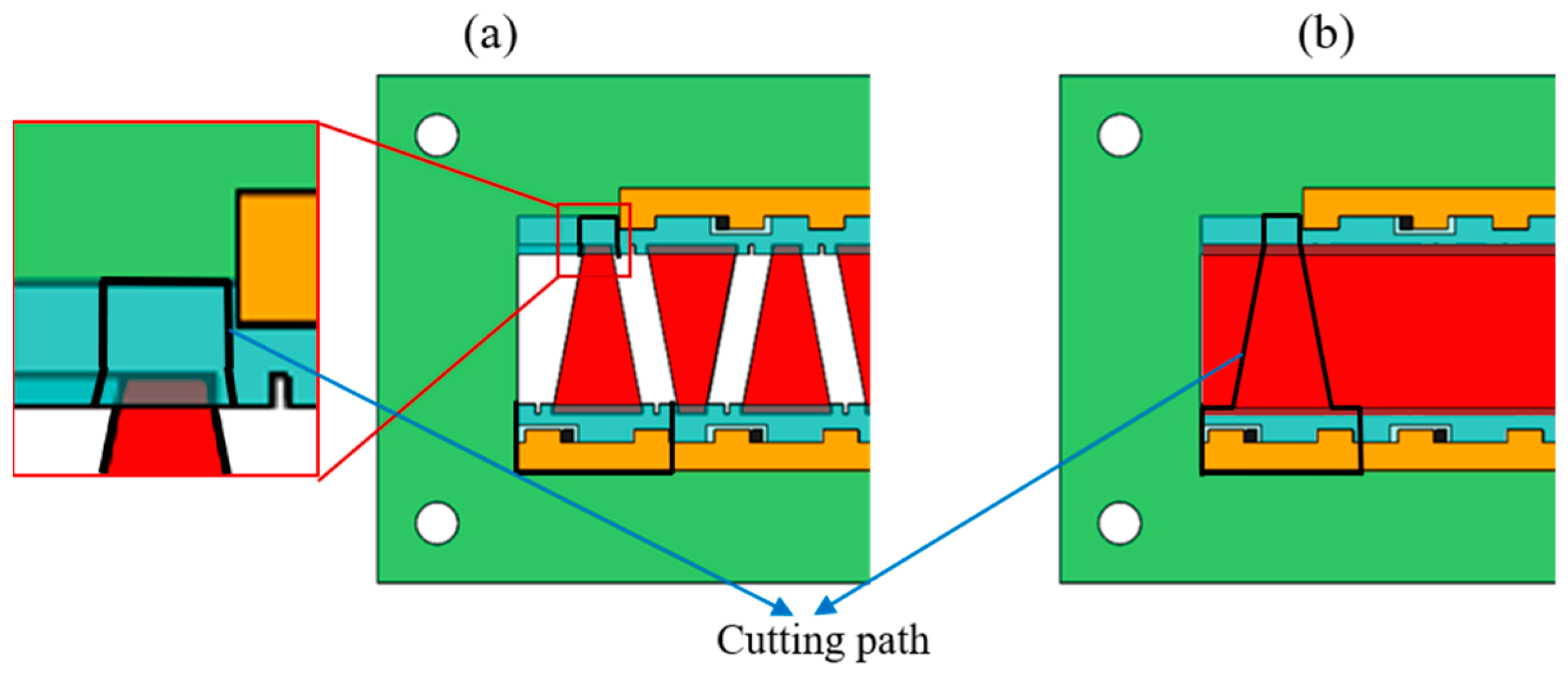
Figure 4a,b are stacked laminates with discrete patterned pieces of PZT and a whole piece of PZT, respectively. The black solid lines are the cutting paths of the laser. To improve the cutting speed, the high-power laser is used during the actuator release process. As shown in
Figure 4a, when using discrete PZT pieces for stacking, the damage to the PZT by the high-power laser can be avoided by making the cutting path deviate from the PZT profile. However, when using a whole piece of PZT, to prevent laser damage to the PZT, it is necessary to cut the PTZ with a low-power laser and cut other materials with a high-power laser, and the laminate needs to be flipped for repeated cutting [
22]. The requirements for cutting parameters are strict, and the process is complex.
4. Transmission Parameters Design
The parameter design of the transmission is crucial for miniature robots, affecting the transmission efficiency, as well as the robot’s payload capacity and speed of movement. In this section, we model and analyze the transmission system of the robot and optimally design its parameters.
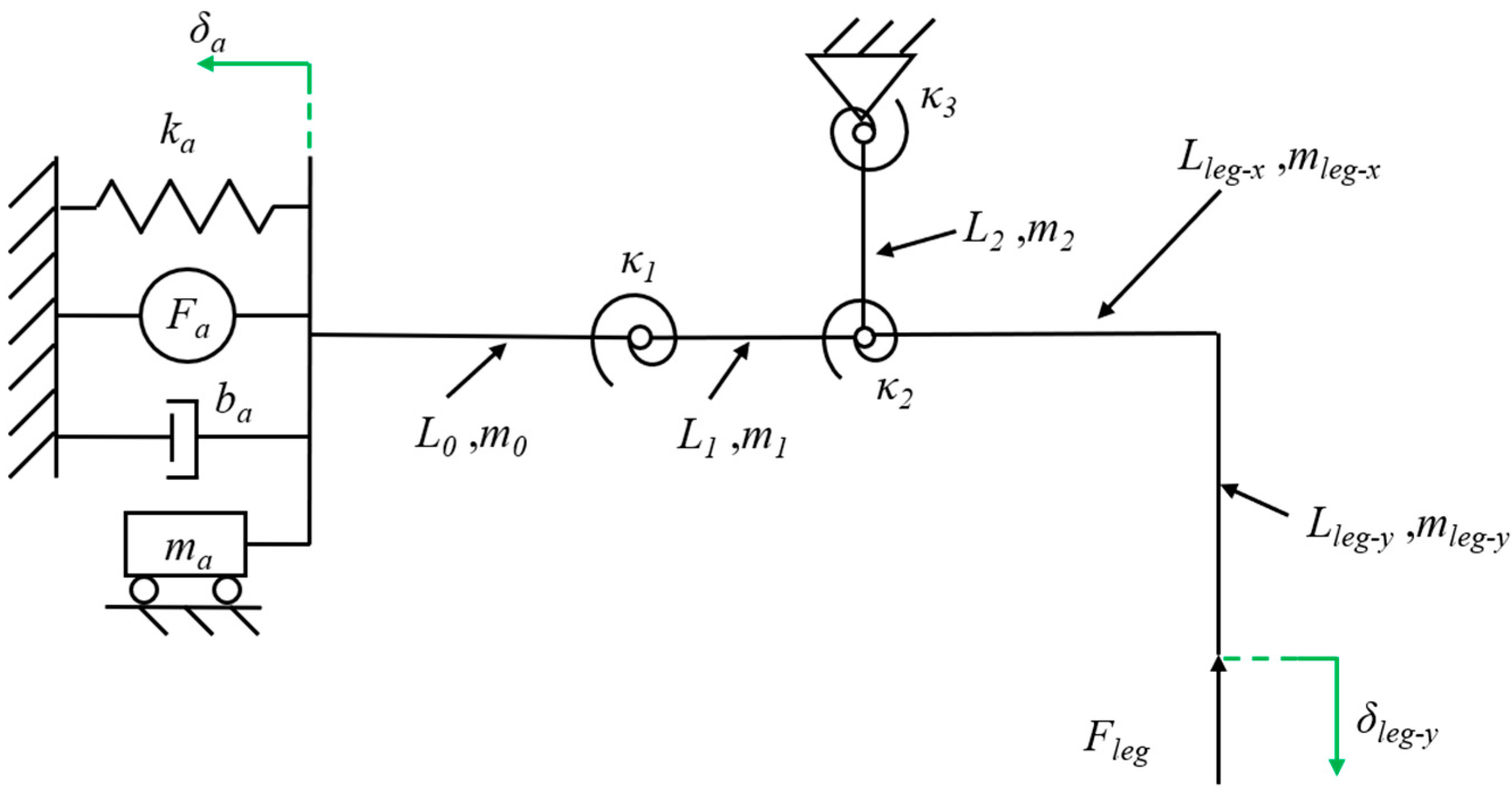
The piezoelectric actuator is modeled as a force source
Fa in parallel with a spring
ka and a damper
ba and has a certain mass
ma to describe the dynamic performance [
30]. Since the lift and swing DOFs of the transmission are fully decoupled, the lift DOF including a crank-slider mechanism can be analyzed separately. The flexure hinge in the transmission is equivalent to a pseudo-rigid body model that includes a rigid pin joint and a torsional spring [
20]. The illustration of the lift powertrain model is shown in
Figure 5.
Assuming that the relevant parameters of the actuator and the displacement of the robot leg are known, the equation is obtained based on the kinetic energy balance:
where
Fa is the actuator block force generated when the end displacement is 0, which is a constant value under a determined drive voltage;
δa is the bending displacement of the actuator, which is variable;
ka is the actuator stiffness;
ba is the actuator damping;
ki and
ϕi (
i = 1, 2, 3) is the bending stiffness and the rotation angles of the flexure hinges, respectively;
Fleg is the force experienced by the leg;
δleg-y is the lift displacement of the leg;
ma is the actuator mass;
mi and
Li (
i = 0, 1, 2) are the masses and lengths of the links in the crank-slider mechanism, respectively; Δ
vi and Δ
ωi are the velocity changes and angular velocity changes of the links from the beginning to the end of the motion, respectively; similarly, Δ
vleg and Δ
ωleg are the velocity changes and angular velocity changes of the leg, respectively; and
Ji and
Jleg are the moments of inertia of the links and leg, respectively.
The resonance frequency of piezoelectric actuators is on the order of 1 kHz [
30], while the operating frequency of the actuators in this paper is at a frequency below 100 Hz, so the actuator works quasi-statically. And the mass and damping can be neglected. In addition, the links in the transmission weigh approximately 1 mg, which can be regarded as massless links [
31]. At the same time, the robot’s velocity changes very little during the quasi-static movement (1–10 Hz) [
20]. Based on these analyses, simplifying Equation (1) and taking the derivative of t yields:
Dividing Equation (2) with
∂δa/
∂t yields:
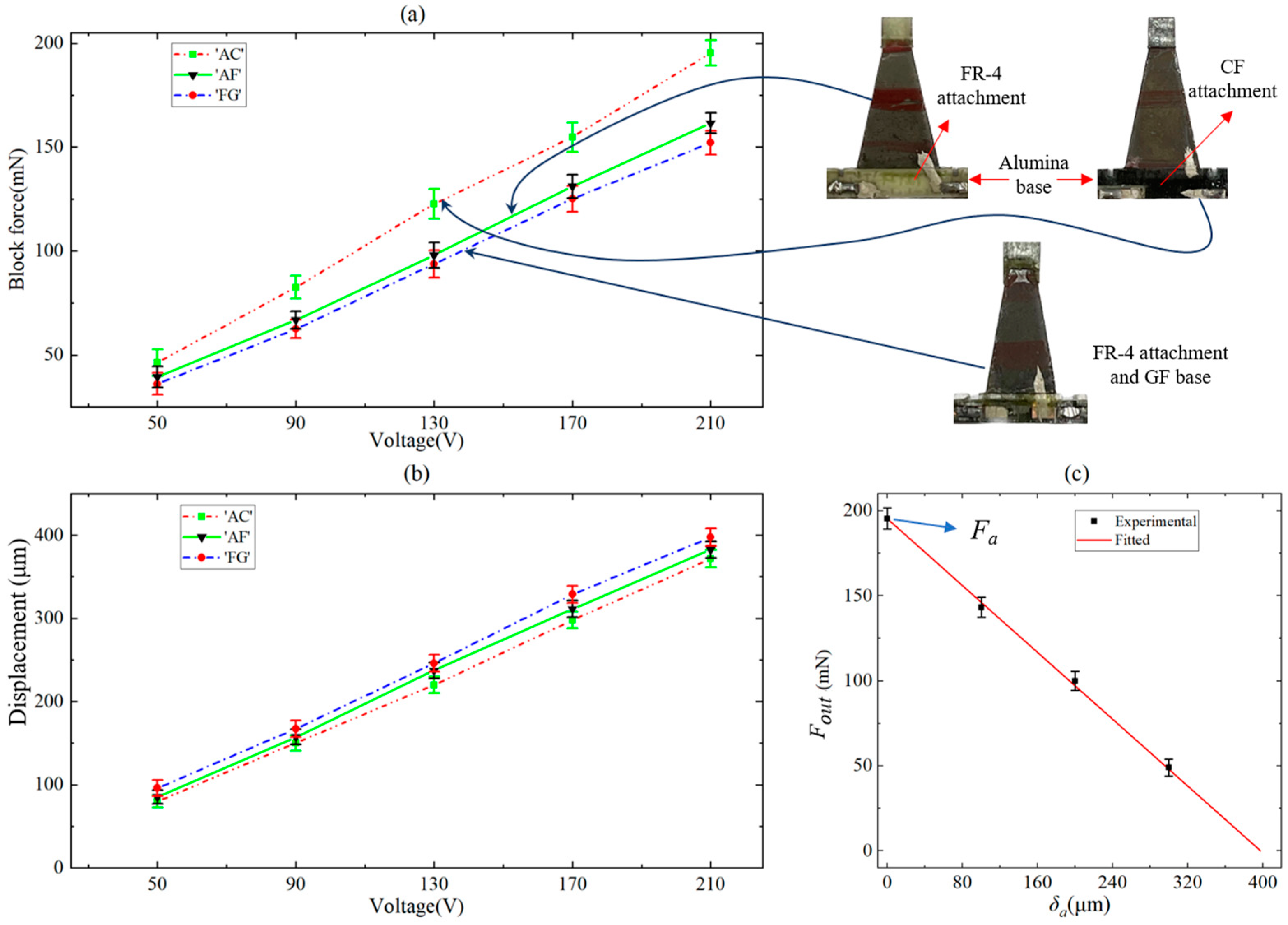
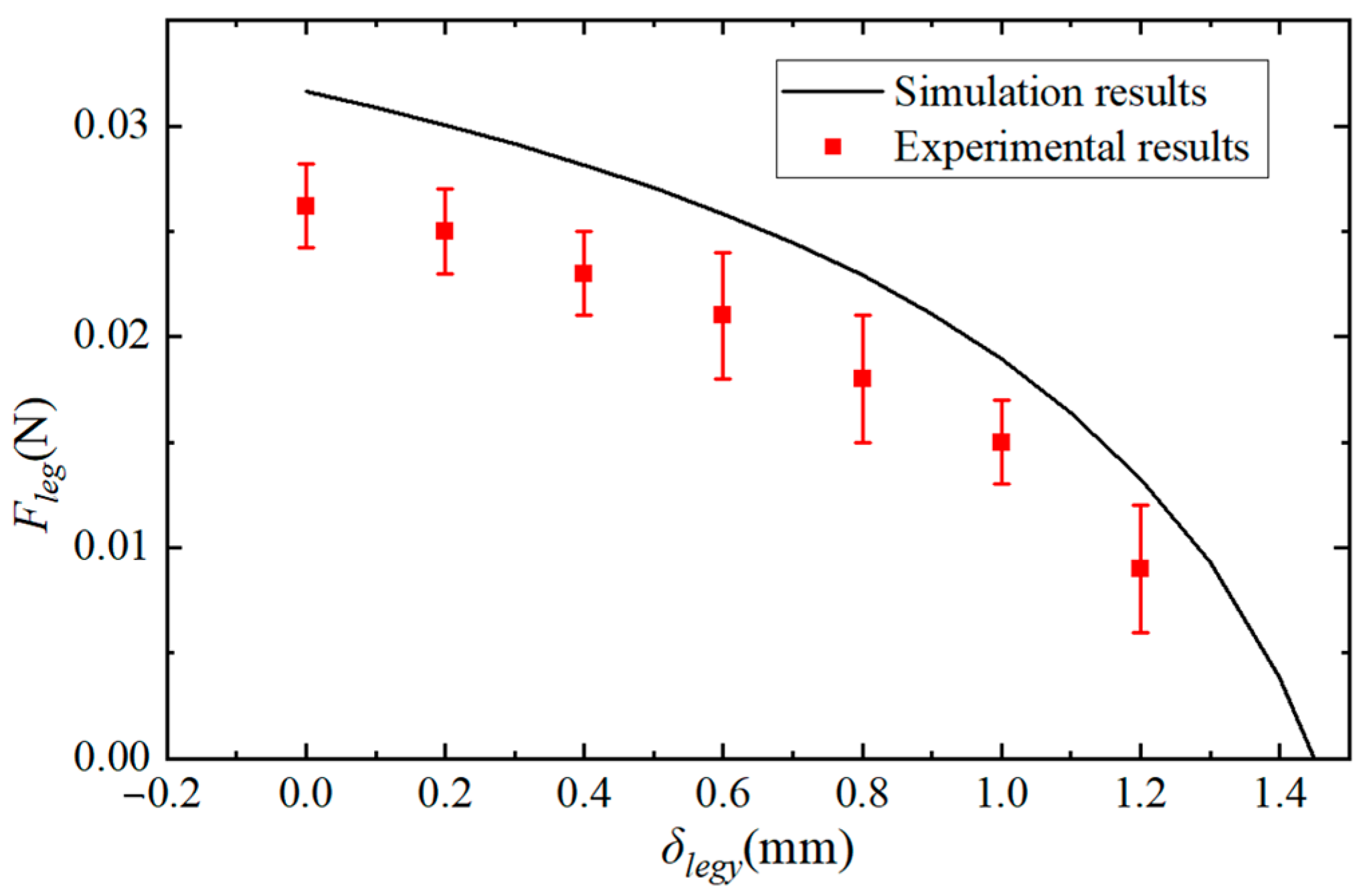
According to Equation (3), the output force of the robot leg is determined by the output characteristics of the actuator, the mechanical properties of the flexure hinge, and the kinematic relationship of the crank-slider mechanism. The relationship between the output force and bending displacement of the beam end of the piezoelectric actuator is linear for the quasi-static motion [
24], and the proportional coefficient is the stiffness
ka of the actuator. Therefore, the output characteristic curves of
Fa and
δa can be obtained by linearly fitting the experimental results of the output force and output displacement with the least squares method. The experimental data and fitting results will be provided in
Section 6.1. The kinematics of the crank-slider mechanism can be given by the following closed equation:
Substituting the solution of Equation (4) into Equation (3), the output force
Fleg of the leg can be given as:
Obviously, when the displacement of the robot leg is given and the stiffness of the flexure hinges is known, the leg output force is uniquely determined by the lengths of each link. By fitting the experimental data, it can be obtained that the actuator force
Fa = 195 mN and the actuator stiffness
ka = 491 N/m (as we will describe in
Section 5). Meanwhile, to reduce the impact of the robot sagging under load, the leg output displacement
δleg-y is specified as 1.5 mm. For the flexure hinges, we designed their lengths and widths to be 120 μm and 1.6 mm, respectively, for ease of manufacturing. Commercially available polyimide films for miniature robots are typically 20 μm, 30 μm, 40 μm, and 50 μm in thickness. Therefore, the stiffness of the flexure hinges can be calculated [
25]. To sum up, with the link lengths (
L1,
L2,
Lleg-x, and
Lleg-y) as the design variable and the leg output force as the objective function, the optimization problem of the robot’s payload capacity is determined in this regard. We limit the length, width, and height dimensions of the whole robot to 5 cm × 5 cm × 3 cm, and, considering the assembly relationship between the various components of the robot, as well as the inherent geometrical constraints of the crank-slider mechanism, the constraints of this optimization problem can be given by the following equations:
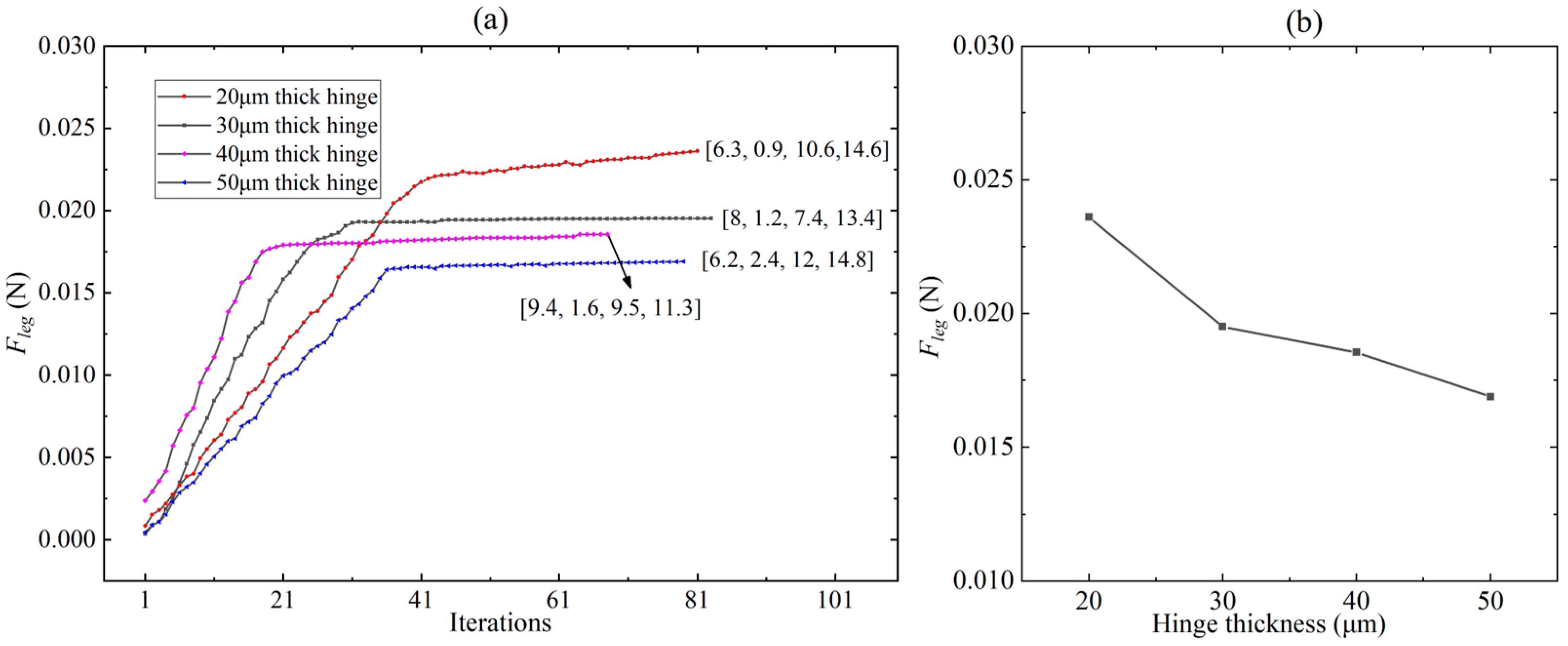
For flexure hinges with different thicknesses (20 μm, 30 μm, 40 μm, and 50 μm), the optimization problem was solved using the MATLAB Optimization Toolbox. The optimization results of the leg output force on different combination lengths [
L1,
L2,
Lleg-x, and
Lleg-y] of the links are shown in
Figure 6a. The horizontal axis refers to the data points formed by different combinations of link lengths. The row vectors in
Figure 6a represent the lengths (unit: mm) of various links corresponding to the maximum output force of the leg. It can be seen from
Figure 6a that, for any thickness of the hinge, there exists an optimal linkage combination that maximizes the output force of the robot leg, and the output force converges with the number of iterations. It is clear that the robot leg has a maximum output force of 0.0236 N when the thickness of the flexure hinge is 20 μm. Based on the optimization results in
Figure 6a, the relationship curve between the hinge thickness and the maximum leg force corresponding to the optimal linkage combination under this hinge thickness was plotted, as shown in
Figure 6b. Obviously, the leg output force increases as the hinge thickness decreases. However, the robot body with 20 μm-thick flexure hinges has a sag of close to 2 mm in the robot locomotion test, so it can not produce effective movement. Therefore, we choose hinges with a thickness of 30 μm for the transmission. Correspondingly, the lengths of the links in the crank-slider mechanism are
L1 = 8 mm,
L2 = 1.2 mm,
Lleg-x = 7.4 mm, and
Lleg-y = 13.4 mm, respectively.
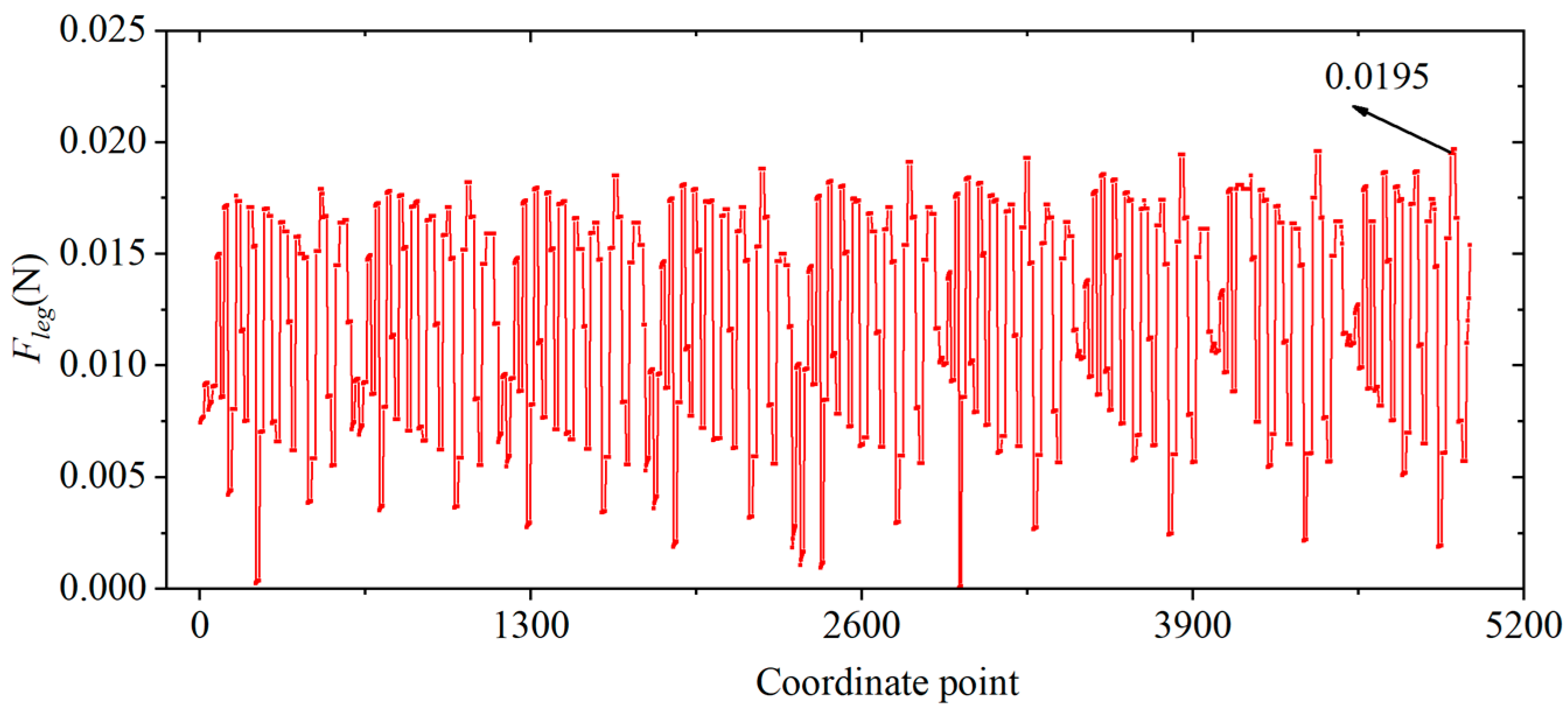
In order to express more intuitively the relationship between the leg output force and the lengths of the links, the constraint space of the four variables (
L1,
L2,
Lleg-x, and
Lleg-y) specified in Equation (6) is divided at 1 mm intervals, that is to say,
L1 = [3 4… 8],
L2 = [0.5 1.5… 4.5],
Lleg-x = [1.5 2.5… 14.5], and
Lleg-y = [4 5… 15].
L1,
L2,
Lleg-x, and
Lleg-y, respectively, contain 6, 5, 14, and 12 elements. Then, four four-dimensional matrices containing 6 × 5 × 14 × 12 elements are generated using MATLAB’s ‘ndgrid’ function, and the corresponding elements of the four matrices at the same position constitute 5040 co-ordinates (i.e., the combination of lengths of each link). Taking two two-dimensional matrices M and N as an example, the corresponding elements of M and N at the same position refer to the two elements in the i-th row and j-th column of these two matrices. According to Equation (5), an image of the
Fleg =
f (
L1,
L2,
Lleg-x,
Lleg-y) is plotted as shown in
Figure 7. Obviously, different co-ordinate points correspond to different leg output forces, and there exists a co-ordinate point (combination of link lengths) that maximizes the leg output force.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}